3.3. ELEKTRIMOOTORITE DISTANTS- JA AUTOMAATJUHTIMISSKEEMID Elektriajamiks nimetatakse masina või seadme osa, mis koosneb elektrimootorist (või mootoritest), ülekandemehhanismist, mis sidurdab mootorit käitatava töömasinaga ja juhtimisaparatuurist. Automatiseeritud elektriajam võimaldab tõsta töömasina tootlikkust ja valmistatava toodangu kvaliteeti ning parandada tööliste töötingimusi. Väga tähtis on valida masinale (tööpink, pump,ventilaator, kraana, vms.) sobiva võimsusega mootor. Kui mootori nimivõimsus osutub liiga väikeseks ja masin töötab ülekoormusel, siis temperatuur tõuseb üle lubatava piiri, kahjustades mähiste isolatsiooni. Liiga suure võimsusega mootor teeb aga masina või seadme kalliks. Selline mootor töötab väikese kasuteguri ja cos- ga. Elektrimootorite distants- ja automaatjuhtimisskeemides ja elektrivõrku kommuteerimisel kasutatakse mitmesuguse ehitusega käivitusnuppe, mis paiknevad kilpi...
Tallinna Tehnikaülikool Ehitiste projekteerimise instituut Kursuseprojekt aines "RAUDBETOONKONSTRUKTSIOONID. PROJEKT" Üliõpilane: S. Avdejev Matr. nr.: 000342 Juhendaja: J. Pello Esitatud: Arvestatud: Tallinn 2004 sisukord 1. LÄHTEÜLESANNE.................................................................................. 2 2. PLAADI ARVUTUS.................................................................................. 3 2.1. Koormused plaadile.........................................................................3 2.2. Plaadi sisejõud................................................................................ 3 2.3. Armatuuri dimensioneerimi...
SIRGE JA TASANDI VÕRRANDID Sirge tasandil Sirge ruumis Tasand Parameetrili ne vektorvõrra s : AX = ts t R : AX = t1u + t 2 v t1 , t 2 R nd --||-- koha- vektorite s : x = a + ts t R : x = a + t1 u + t 2 v t1 , t 2 R kaudu Parameetrili sed x1 = a1 + ts1 x1 = a1 + t1u1 + t 2 v1 vektorvõrra x1 = a1 + ts1 ...
Aritmeetika-loogika seade (ALU) M=0 Aritmeetilised operatsioonid M=1 Loogilised operatsioonid Sn-1 ... S1 S0 Sn-1 ... S1 S0 0 0 0 AOPo 0 0 0 LOPo 0 0 1 AOP1 0 0 1 LOP1 0 1 0 AOP2 0 1 0 LOP2 . . . . . . 1 1 1 AOPj-1 1 1 1 LOPj-1 a0 a1 . Operand A . y0 . ak-1 y1 ALU ...
TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Signaalitöötluse õppetool Pidevsignaalide töötlemine Iseseisev töö Täitja: XXXXXXXXXXX Tallinn 2008 Kasutatavad signaalid Ülesanded 1. Tuua välja signaalide S1 (t ) ja S2 (t) analüütiline kuju kasutades Heavisideí funktsoone. Leiame tõusud kasutades valemeid: S 2 - S1 S2 S(t)=S(t-t') S= t'=t2- t2 - t1 S S1(t): t1=0ms t2=1ms S1=0V S2=1V S=1000 t'=0 t1=1ms t2=2ms S1=1V S2=0V S=-1000 t'=0,002 S1(t)= 1000t·H(t-0)·H(0,001-t) + (-1000)(t-0,002)·H(t-0,001)·H(0,002-t) S2(t): t1=1ms t2=2ms S1=1V S2=-1VS=-2000 t'=0,0015 t1=0ms t2=1ms tõus puudub S2(t)= (-1)H(t-0)H(0,001-t) ...
Ande Andekas-Lammutaja Matemaatika Sirge võrrand ruumis Kahe punkti A ja B kaudu: A( x1 ; y1 ;z1 ) B ( x 2 ; y 2 ;z 2 ) x - x1 y - y1 z - z1 = = x 2 - x1 y 2 - y1 z 2 - z1 Punkti A ja sihivektori s kaudu: A( x1 ; y1 ;z1 ) s ( s1 ; s 2 ; s 3 ) x - x1 y - y1 z - z1 = = = t kanooniline s1 s2 s3 x = x1 + s1t y = y1 + s 2 t parameetriline z = z +s t 1 3 Tõusu k ja algordinaadi b (y väärtus, kui x=0) kaudu: k; b y = kx +b k = tan Kahe sirge s ja t vahelise nurga arvutamine: s = ( s1 ; s 2 ; s 3 ) t = (t1 ; t 2 ; t 3 ) s t = s t cos s t s1 t1 + s 2 t 2 + s 3 t 3 cos = = s t s12 + s 22 + s 32 t12 + t 22 + t 32 Kui vektorit...
1. Koosta sirge võrrand, kui sirge läbib punkte C(-3 ; 1) ja D(2 ; -5). X - XC Y - YC Sirge võrrand kahe punkti järgi: = . X D - X C YD - YC X - ( -3) Y -1 X + 3 Y -1 Asetame arvud võrrandisse: = = . 2 - ( -3) - 5 -1 5 -6 5y 5 = 6x 18 5y + 6x 5 + 18 = 0 6x + 5y + 13 = 0 2. Leia punktiga A(5 ; -2) ja sihivektoriga s = (3 ; -2) määratud sirge võrrand. X - X A Y - YA Sirge kanooniline võrrand: = . s1 s2 X - 5 Y - (-2) Asetame arvud võrrandisse: = . 3 -2 3y + 6 = 2x + 10 2x + 3y 4 = 0 3. Leia kahe punktiga C(-1 ; 3) ja D(7 ...
Ülesanded II Lahendusi 1. Aasta auto 1997 tiitli pälvinud Renault Megane Scenic`i võimsama mootoriga variant saavutab paigalseisust startides 9,7 sekundiga kiiruse 100 km/h. a) Kui suur on selle auto keskmine kiirendus? b) Kui pika tee võib auto läbida esimese 15 s vältel? t = 9,7 s 100 1000 lõppkiirus v1 = 100 km h = m s 27,8 m s 3600 algkiirus v0 = 0 t = 15s kiirendus a=? teepikkus s=? Lahendus. v1 - v0 27,8 - 0 a) Kiirendus a = = = 2,87 2,9 m s 2 t 9,7 at 2 b) Teepikkus ühtlaselt muutuva liikumise korral s = v0t + . Kui algkiirus v0 = 0 , siis 2 at 2 2,87 152 s= = 3,2 102 m . 2 2 Vastus: a) Kiirendus on 2,9 m/s2. b) Esimes...
Sirge tõusunurgaks nimetatakse nurka (alfa), mis on x-telje positiivse suuna ja sirge vahel. Sirge tõusuks nimetatakse suurust tan(alfa). Sirge algordinaadiks nimetatakse ordinaadi väärtust, kus sirge lõikab y-telge. Sirge võrrand kahe puntki abil: x-x1 / x2-x1 = y-y1 / y2-y1 Sirge võrrand ühe punkti ja sihivektoriga: x-x1 / s1 = y-y1 / s2 Sirge võrrand punkti ja tõusuga: y-y1 = k(x-x1) Sirge võrrand tõusu ja algordinaadiga: y = kx + b Ühel sirgel on lõpmata palju sihivektoreid. Teame järgnevaid sirge määramise viise: kahe punkti abil, punkti ja sihivekotriga, punkti ja tõusuga, tõusu ja algordinaadiga. Sirge on omavahel risti kui nende tõusude korrutis on -1, s.t. k1 * k2 = -1. N: 12x 3y = 0; 2x + 8y 9 = 0 s1(3;12) s2(-8;2) s1*s2=3*(-8)+12*2=0 Sirge üldvõrrand: ax + by + c = 0 => s(prim) = (-b; a) Kahe sirge vastastikused asendid: s: a1x + b1y + c1 = 0 t: a2x + b2y + c2 = 0 I ühtivad: a1/a2=b1/b2=c1/c2 II p...
1) Funktsioon, mis loendab, mitu etteantud sümbolit on etteantud tekstis loenda (tekst, sümbol) 2) funktsioon, mis leiab, mitmes on etteantud sümbol etteantud tekstis; kui sümbolit tekstis ei ole, on funktsiooni väärtuseks 0 mitmes (tekst, sümbol) 3) funktsioon, mis väljastab etteantud teksti sümbolid vastupidises järjestuses tagurpidi (tekst) 4) Suurim ühistegur (SÜT) Koostada töölehe funktsioon kahe arvu suurima ühistegugi leidmiseks. Vt. skeemi. Antud arvude suurimaks ühisteguriks nimetatakse suurimat arvu, millega kõik antud arvud jaguvad. Function SÜT (arv1 As Long, arv2 As Long) As Long ...
TALLINNA TEHNIKAKÕRGKOOL TALLINN COLLEGE OF ENGINEERING KODUSED ÜLESANDED AINES HÜDRAULIKA, PNEUMAATIKA Variant: NR. 9 Mehaanikateaduskond Üliõpilane: Õpperühm: Õppejõud: Tallinn Ülesanne 2 Arvutage, milline on vedeliku poolt mahuti põhjale avaldatav hüdrostaatiline rõhk, kui mahuti on täidetud vedelikuga, mille tihedus on = 850kg/m3 ja vedeliku vabale pinnale mõjub väline ülerõhk p0 = 1,2 bar. Vedeliku taseme kõrgus mahutis on 14 m. Antud: = 650kg/m3 p0 = 0,028 bar = 2800Pa h = 2,5m g = 9,8 p=? p = hg + p0 p = 650 2,5 9,8 + 2800 = 18725 N/m 2 = 0,19bar Vastus: Vedeliku poolt mahuti põhjale avaldatav hüdrostaatiline rõhk on 0,19 bar. Ülesanne 4 Vertikaalselt paiknev hüdrosilinder peab tõstma koormust massiga m=5600 kg. Milline peab olema koormust tõstva silindri minimaalne läbimõõt ...
11. Tuleohutus 11.1. Ehitusmaterjalid ja põlemine Ehitusmaterjalide tulekindlus - fire-resistance (fire-proof materials) Tulekindlus on materjali omadus püsida sulamata kõrges temperatuuris. Liigitatakse tulekindluse mõõdu sulamistemperatuuri t°s (°C ) järgi: 1) tulekindlateks (fire-proof ) t°s > 1580°C, 2) raskelt sulavad (hard smelt) t°s = 1350...1580 °C, 3) kergelt sulavad t°s < 1350 °C. Tulekindlate materjalide gruppi kuuluvad: a) taval. tulekindlad materjalid t°s 1580...1770 °C (samott) b) kõrge tulekindlusega materjalid t°s 1770...2000 °C ( nn. dinased Al2O3 sisaldusega materjalid) c) üli-tulekindlad t°s > 2000 °C (magnesiaalsed tooted) Sulamistemperatuuri mõõdetakse koonuse vajumisega aluspinnani. Ehituskeraamika tooted, mis toodetakse tavalistest savidest (tellised, kärgtellis, tühiktellis) kuuluvad kergelt sulavate mat. gruppi. Raskelt sulav näit. pottsepasavidest tooted (keraam...
w rev - w 0 1. Selgitage järgmisi keemilise termodünaamika kuumemalt kehale külmemale. Kui gaas paisub mahust põhimõisted:termodünaamiline süsteem, vaakumisse siis x suureneb , q paisub, saabub tasakaal. tasakaal,temperatuur. 5. Töö, soojuse ja siseenergia arvutamine ideaalgaasile , kokkusurumisel: Kuidas on defineeritud absoluutne temperatuuriskaala? isotermilise, isokoorilise ja isobaarilise protsessi korral. Termodünaamiline süsteem süsteem eeldab et ta oleks V2 V1...
PPJ PVC isolatsiooniga paigalduskaabel Kasutusala Kohtkindlaks paigalduseks sise- ja välitingimustes, kuid mitte pinnasesse. Sobiv paigaldamiseks krohvi alla. Välipaigaldusel on vajalik kaabel otseste päikesekiirte eest kaitsta. Maksimaalne tõmbetugevus . . . . . . . . . . . . . Ax50 N/mm2 Lubatud temperatuurid Suurim lubatud temperatuur - kestval koormusel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 C - lühise korral (maks. 5 s) . . . . . . . . . . . . . . . . . . . . . . 160 C Madalaim lubatav paigaldustemperatuur . . . . . . . . 15 C Lubatud painderaadiused Paigaldusel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10D Ühekordselt lõplikul painutamisel . . . . . . . . . . . . . . . . . . 3D Ehitus Juhe . . . . . . . . . . . . lõõmutatud vaskjuhe 1,5 4 mm2ühetraadiline, 6 25 mm2 keerutatud Isolatsioon . . . . . . .PVC, sooned eristatavad värvide järgi Vahekiht . . . . . . . . . täitematerj...
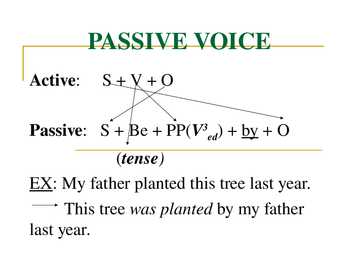
PASSIVE VOICE Active: S + V + O Passive: S + Be + PP(V3ed) + by + O (tense) EX: My father planted this tree last year. This tree was planted by my father last year. TABLE OF ENGLISH TENSES IN PASSIVE VOICE The Simple Present Tense Active: S + V(s/es) + O Passive: S + am/is/are + PP + by + O EX: He reads books every day. Books are read (by him) every day. TABLE OF ENGLISH TENSES IN PASSIVE VOICE The Present Continuous Tense Active: S + am/is/are + Ving + O Passive: S + am/is/are + being +PP + by + O EX: He is writing a novel at the moment. A novel is being written (by him) at the moment. TABLE OF ENGLISH TENSES IN PASSIVE VOICE The Present Perfect Tense Active: S + Has/Have + V3ed + O Passive: S + has/have + been +PP + by + O EX: He has just finished a novel. A novel has just been finished (by him). TABLE OF ENGLISH TENSES ...
1. Töö ülesanne. Töö eesmärgiks on tundma õppida elektrikahjustuse ulatust mõjutavaid tegureid. 2. Kasutatud seadmete loetelu. Heli- ja ultrahelisagedusgeneraator 3-4A Lampvoltmeeter B3-3 3. Töö lühike kirjeldus koos katseseadme skeemiga. Generaator ja lampvoltmeeter ühendatakse võrku ja lülitatakse sisse ning oodatakse, kuni nad soojenevad. Vastavale käsitsemise juhendile kontrollitakse nende korrasolekut. Generaatori 3-4A väljundpinge reguleerimise nupp asetatakse äärmisesse vaskpoolsesse asendisse. Sagedusteskaala ja piirkonnalüliti abil antakse elektroodidele vajaliku sagedusega vool. Pöörates sujuvalt väljundpinge regulaatorit antakse elektroodidele töö juhendaja poolt kindlaks-määratud pinge. Üks katsetajatest asetab käed kas elektroodidele s1 või s2. Millivoltmeetri ja voltmeetri näidud kantakse tabelisse. Andes elekt...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
TTÜ Tartu Kolledz Säästva tehnoloogia õppetool Buldooseri veo- ja tootlikkuse arvutus Harjutusülesanne 1. Aines "Ehitusmasinad" NTS 0430 Õppejõud: dots. T.Kabanen Tartu 2013 Käesoleva ülesande eesmärk on tutvumine kaevamis-transportimismasinate veo- ja tootlikkuse arvutuste metoodikaga lähtudes töödeldava pinnase omadustest. Ülesandes tuleb määrata: - buldooseri tööprotsessis tekkivad takistused töötsükli etappidel: - pinnase lõikamisel, teisaldamisel ja tühjalt tagasisõidul; - mootori vajalik võimsus (valida selle alusel sobiv masin Lisast 1); - valitud masina võimalikud liikumise kiirused tsükli etappidel; - valitud masina tunnitootlikkus teisaldamiskaugustel 15, 30, 50, 75, 100 ja 125 m; - joonestada buldooseri tootlikkuse graafik sõltuvalt teisaldamise kaugusest. ...
TALLINNA TEHNIKAÜLIKOOL Energeetikateaduskond Elektrotehnika aluste ja elektrimasinate instituut ELEKTROTEHNIKA II Kodutöö nr. 2 Homogeenne liin Skeem nr 14 Tudeng: Juku Matrikli nr: 0000000 Rühm: AAAB Juhendaja: A. Kilk Tallinn 2016 Elektrotehnika II kodutöö nr 2 Algandmed: f 6500 f 6500 Hz L 21 L 21km R0 102 R0 102 / km C 0 2.8 10 9 C 0 2,8nF / km L0 4.27 10 3 2 15.37 deg ...
Buldooseri veo- ja tootlikkuse arvutus Harjutusülesanne 1. Üliõpilane: Eriala: Ülesanne saadud 05.11.2012. Üliõpilaskoodi viimane nr Ülesande esitamise tähtaeg: 28.11.2012. 1 Käesoleva ülesande eesmärk on tutvumine kaevamis-transportimismasinate veo- ja tootlikkuse arvutuste metoodikaga lähtudes töödeldava pinnase omadustest. Ülesandes tuleb määrata: - buldooseri tööprotsessis tekkivad takistused töötsükli etappidel: - pinnase lõikamisel, teisaldamisel ja tühjalt tagasisõidul; - mootori vajalik võimsus (valida selle alusel sobiv masin Lisast 1); - valitud masina võimalikud liikumise kiirused tsükli etappidel; - valitud masina tunnitootlikkus teisaldamiskaugustel 15, 30, 50, 75, 100 ja 125 m; - joonestada buldooseri tootlikkuse graafik sõltuva...
Tabel 5.1 m1=10,16±0,005 g Katse nr. s ± s, cm t, s t-tk, s (t-tk)2, s2 1,4596 -0,03552 0,001262 1,5824 0,08728 0,007618 1 30±0,5 1,4222 -0,07292 0,005317 1,4987 0,00358 1,3E-005 1,5127 0,01758 0,000309 tk 1,49512 Kokku: 0,014519 1,7115 -0,0103 0,000106 1,7251 0,0033 1,1E-005 2 40±0,5 1,6838 -0,038 0,001444 1,6679 -0,0539 0,002905 1,8207 0,0989 0,009781 tk 1,7218 Kokku:...
Keith Tauden JAMES BONDI AUTOD REFERAAT Õppeaines: ERIALA SISSEJUHATUS Transporditeaduskond Õpperühm: AT11b Juhendaja: lektor Sven Andresen Esitamiskuupäev: 14.01.2015 Üliõpilase allkiri:.................. Õppejõu allkiri:..................... Tallinn 2014 SISUKORD SISSEJUHATUS..............................................................................................................................3 1. JAMES BONDI NELJARATTALISED LÄBI AEGADE........................................................4 1.1. Enim kõmu tekitanud autod...............................................................................................4 1.1.1. Aston Martin DB5..................................................................................................
Sirge tasandil © T. Lepikult, 2010 Lõigu pikkus Punktide A(x1; y1) ja B(x2; y2) vaheline kaugus ehk neid ühendava lõigu pikkus d on leitav valemiga d = ( x2 - x1 ) 2 + ( y2 - y1 ) 2 . y Valemit saab põhjendada B Pythagorase teoreemiga. y2 d y2 - y1 y1 A x2 - x1 0 x1 x2 x Lõigu keskpunkt Punktide A(x1; y1) ja B(x2; y2) vahelise lõigu keskpunkti C koordinaadid on leitavad valemitega 1 1 x0 = ( x2 - x1 ) , y0 = ( y2 - y1 ) . 2 2 y B y2 y0 C y1 A ...
Ande Andekas-Lammutaja Matemaatika Püramiid Püramiidiks nimetatakse hulktahukat, mille üks tahk (põhi) on kumer hulknurk ja kõik ülejäänud tahud (külgtahud) on ühise tipuga kolmnurgad. Kui püramiidi põhjaks on n-nurk, siis nimetatakse püramiidi n-nurkseks püramiidiks. Kõrguseks nimetatakse püramiidi tipu kaugust põhjast ja vastavat sirglõiku. Püramiidil ei ole diagonaale. Diagonaallõike saame, kui lõigata püramiidi tasandiga, mis läbib püramiidi tippu ja üht põhja diagonaali. Püramiidi nimetatakse korrapäraseks, kui selle põhjaks on korrapärane hulknurk ja püramiidi põhja projektsioon asub põhja keskpunktis. Korrapärase püramiidi kõik külgtahud on võrdsed. Teljeks nimetatakse sirget, mis läbib korrapärase püramiidi tippu ja põhja keskpunkti. Apoteemiks nimetatakse korrapär...
Ülesanne 4 Veeaur Kui palju kulub soojust t1 temperatuuril oleva niiske (x=0,8) veeauru temperatuuri tõstmiseks temperatuuri t2 suletud ventiilidega katlas (püsival mahul), kui auru on 3 kuupmeetrit? Algandmed: t 1 = 180°C t 2 = 390°C x= 0,8 V=3m3 T1=180+273,15= 453,15 K T2=390+273,15= 663,15 K L=0 Arvutused: q=Δh - v·Δp Q=q·m Erientalpia: h1=(1-x)·h’+x·h’’ Erientroopia: s1=(1-x)·s’+x·s’’ h1=(1-0,8)·762,7+0,8·2778=2374,94 kJ kJ s1=(1-0,8)·2.138+0,8·6,587=5,697 Kg·K Kg Niiske auru erimaht: v1=(1-x)·v’+x·v’’ 3 v1=(1-0,8)·0,00113+0,8·0,1946= 0,1559 m= 0,1559 =19,243 Kg m3 Kg Leian tabelist: p1=0,20Mpa=200 kPa Leian veeauru diagrammilt: s2=3230 kJ /(kg·K) h2=5,25 kJ / kg p2=310kPa Arvutan välj...
Kordamisküsimused matemaatilise analüüsi (II) II osaeksamiks 2013 1. Kahekordne integraal (integraalsumma, kahekordse integraali definitsioon, kahekordse integraali omadused (vastavad teoreemid tõestuseta)). n Moodustame summa: Vn = f ( P1 )s1 + f ( P2 )s 2 + ... + f ( Pn )s n = f ( Pi )s i i =1 Seda summat nimetatakse funktsiooni f(x,y) integraalsummaks üle piirkonna D. Teoreem 1. Kui funktsioon f(x,y) on kinnises piirkonnas D pidev, siis integraalsummade jadal leidub osapiirkondade si maksimaalse läbimõõdu nullile lähenemisel ja n lõpmatul kasvamisel piirväärtus, mis on üks ja sama iga jada puhul, s.t. ta ei sõltu piirkonna D osapiirkondadeks si jaotamise viisist ega punkti Pi valikust piirkoonas si. Seda piirväärtust nimetatakse funktsioonif (x,y)...
Tallinna Tehnikaülikool Füüsikainstituut Üliõpilane: Taivo Tarum Teostatud: Õpperühm: EAEI20 Kaitstud: Töö nr: 5 OT allkiri: Külgliikumine Töö eesmärk Töövahendid Ühtlaselt kiireneva sirgliikumise Atwoodi masin, lisakoormised. teepikkuse ja kiiruse valemi ning Newtoni teise seaduse kontrollimine. 1. Tööülesanne Ühtlaselt kiireneva sirgliikumise teepikkuse ja kiiruse valemi ning Newtoni teise seaduse Kontrollimine. 2. Töövahendid Atwoodi masin, lisakoormised 3. Töö teoreetilised alused 3.1. Atwoodi masin Atwoodi masinaga saab kontrollida ühtlaselt kiireneva sirgliikumise valemeid ja Newtoni teist seadust. Seejuures on kontroll ligikaudne, sest esineb hõõrdumine. Masina põhiosadeks on vertikaalne met...
Majanduse alused Teema 2: Turumehhanism. Nõudlus ja pakkumine. Elastsus 1 Eesmärk: Selgitada: · kuidas toimib konkurentsiturg · nõudluse ja pakkumise seadust ja funktsiooni · nõudlust ja pakkumist mõjutavaid mittehinnafaktoreid · tasakaaluhinna ja - koguse kujunemist · defiitsiidi ja ülepakkumise mehhanismi · nõudluse ja pakkumise dünaamikat ja erinevaid elastsuse liike nõudluse hinna elastsust nõudluse tuluelastsust 2 nõudluse ristelastsust Hüviste turg T.tegurite turg Tööturg Maaturg Kapitaliturg Füüsilise Finants- kapitali turg kapitali turg 3 Turumehhanism see on peamiste turuelementide: nõudluse, pakkumise, hinna ja konkurentsi seos ja koostoime. Turumehhanismi omapäraks o...
1.Vektorruumis on ainult üks nullelement tõestus: Olgu V vektorruum 2 omadus ütleb, et leidub . Olgu meil vektorruumis 1 ja2 vektorruumid. Vastavalt 2 saame seosed x+ 1 =x, 1 +x =x iga xV, y+ 2 =y, 2+y=y iga yV. Valime teises seoses x= 2 ja kolmandad seoses y= 1 Saame 1+ 2= 2 ja 1 +2= 1 oleme saanud 1=1 +2 =2 , et 1 ja 2 olid V nullelemendid, siis on kõik V nullelemendid omavahel võrdsed, st. Saab olla vaid üks nullelement. 2.Sirgete kimp, mis sisaldab teineteisest erinevaid sirgeid üldvõrranditega s: A1x1+A2x2+A3=0; t: B1x1+B2x2+B3=0; koosneb parajasti nendest sirgetest, mille üldvõrrand avaldub kujul (A1x1+A2x2+A3)+(B1x1+B2x2+B3)=0; kus ja on vabalt valitud reaalarvud, mis ei ole korraga nullid. Tõestus: 1) On vaja näidata, et uus võrrand kirjeldab alati antud kimpu kuuluvat sirget: Olgu P(p1,p2) antud kibu keskpunkt, st Ps ja Pt, mistõttu P koordinaadid peavad rahuldama mõlemat võrradit- A1P1+A2P2+A3=0 ja B1P1+B2P2+B3=0. Olgu ,R, ...
Mitmene regressioonanalüüs ja mittelineaarne regressioonanalüüs PD <- read.csv("puud15.CSV") PD$d_k<-with(PD, ifelse(d2>0,(d1+d2)/2, d1)) PD.1<-subset(PD, prt==642 & aasta==2001 & h>0 & hv>0) PD.2<-subset(PD, prt==642 & aasta==2006, select=c(puu,rin,d_k,h,hv)) names(PD.2)<-c("puu","rin_2","d_k2","h_2","hv_2") PD.1.2<-merge(PD.1,PD.2,all.x=T) with(PD.1.2, table(rin,rin_2)) PD.1.2$rin12<-with(PD.1.2, paste(rin,rin_2,sep="")) table(PD.1.2$rin12) PD.1.2E<-subset(PD.1.2, rin12 %in% c("11","22")) # rinnaspindala juurdekasv PD.1.2E$ig5<-with(PD.1.2E, (d_k2^2 - d_k^2)*pi/4) hist(PD.1.2E$ig5) # M0: ig5 = a M0<-lm(ig5~1,PD.1.2E) summary(M0) # mean(PD.1.2E$ig5); sd(PD.1.2E$ig5) # R2: 1-(sd(PD.1.2E$ig5)/var(PD.1.2E$ig5))^2 # Md: ig5 = a + b*d Md<-lm(ig5~d_k,PD.1.2E) summary(Md) # Mh: ig5 = a + b*h Mh<-lm(ig5~h,PD.1.2E) summary(Mh) # Mhv: ig5 = a + b*hv Mhv<-lm(ig5~hv,PD.1.2E) summary(Mhv) ...
Elevaator Algandmed ton := 1000kg ton Q := 20 elevaatori tootlikkus hr a := 70mm väikesetükilise lubjakivi tükisuurus H := 17m vertikaalne tõstekõrgus Arvutus Elevaator parameetrite valik valik (1, lk 237, Tabel 58): Elevaatorikopaks sobib sügav, kaldu asetseva esiküljega ja silindrilise põhjaga kopp, kuna tegemist on kuiva, teralise ja hästi puistuva materjaliga. Aeglase käiguga,täitmine materjali puistamise teel,lossimine vabavoolu teel. := 0.8 keskmine täitetegur m v := 0.7 liikumiskiirus ketil s Lubjakivikillustiku puistekaal.(2) ton killustik := 1.600 3 m Leian koppade jookva meetri mahu. 1000 kg ...
Arrays 1. Delete certain integer from array int[] massiv={}; int b = 5; int count = 0; for (int i : massiv) { if (i == b) count++; } int[] temp = new int[massiv.length - count]; int x = 0; for (int j = 0; j < massiv.length; j++) { if (massiv[j] != 5) temp[x++] = massiv[j]; 2. Find the longest numbers sequence (for example out of array [1111223344] -> sequence of number 1) int[] massiv = {}; int count = 1; int result = 0; int number = -1; for (int i = 1; i < massiv.length; i++) { if (massiv[i] == (massiv[i-1])) { count++; } else { count = 1;}обновляем, если цифра поменялась if (result <= count) { ...
Laboratoorne töö nr. 1 Joone horisontaalprojektsiooni arvutus Lähteandmed: Punkti nr Joone pikkus alguspunktist Kõrguskasv h (m), kaldenurk (kraadi) 0 0 +2,5° 1 31,0 2 89,0 -3,3° 3 189,0 +2,1° 4 213,0 +7,4 m 5 288,0 +2,8 m 6 340,08 -5,3 m 340,15 1 1 Leida: I S=?, IIS=?, d = ? , = N ? Keskmine joone pikkus: 340,08 + 340,15 dkesk= = 340...
TTÜ ehituskonstruktsioonide õppetool Raudbetoonkonstruktsioonide üldkursus I Vello Otsmaa Johannes Pello 2007.a Raudbetoonkonstruktsioonide üldkursus 1 SISSEJUHATUS 1 Raudbetooni olemus Raudbetoon on liitmaterjal (komposiitmaterjal), kus koos töötavad kaks väga erinevate oma- dustega materjali: teras ja betoon. Neist betoon on suhteliselt odav kohalik materjal, mis töö- tab hästi survel, kuid üsna halvasti tõmbel (betooni tõmbetugevus on 10-15 korda väiksem survetugevusest). Teras seevastu töötab ühteviisi hästi nii survel kui ka tõmbel, kuid tema hind on küllalt kõrge. Osutub, et survejõu vastuvõtmine betooniga on kordi odavam kui tera- sega, tõmbejõu vastuvõtmine on kordi odavam aga terasega. Siit tulenebki raudbetooni ma- janduslik olemus: võtta ühes ja samas konstruktsioonis esi...
Sissejuhatus Tegemist on kursusetööga ,,Hoone välispiirde ehitusfüüsikaline analüüs" aines ehitusfüüsika. Töö eesmärgiks on näidata kuidas erinevad materjalid sobivad välisseinaks kasutamiseks ja mis materjalid sobivad või ei sobi soojustamiseks. Materjalide sobivus oleneb muidugi, kus hoone asub, tuule kiirusest, välis- ja sisetemperatuuridest, hoone mugavusklassist, siseruumis ja väljas olevast niiskusest jne. Antud juhul asub hoone Narvas, tuule kiirus on 4,0 m/s, hoone mugavusklass on C, sisetemperatuur on 22oC, siseruumi niiskuseks on 45% ja väljas olev niiskus on 80%. Variant A, milleks on olemasolev välissein, koosneb kuivkrohvist (13 mm) ja põlevkivituhkgaas- betoonist (300 mm). Variant B-s lisandub sissepoole soojustuseks kivivill (100 mm) ja kuivkrohv (13 mm). Variant C lisatakse olemasolevale välisseinale väljapoole kivivill (150 mm) ja kuivkrohv (13 mm). Variant D lisatakse olemasolevale välisseinale väljapoole vahtpolüster...
Punkti nr Joone pikkus algpunktist Kõrguskasv h (m) Kaldenurk v (kraadi) 0 0 +3,80 1 27,0 +1,50 2 90,0 -2,70 3 216,0 -4,3m 4 256,0 -6,8m 5 312,0 +3,7m 6 340,07 340,17 Laboratoorne töö nr 1 Lähteandmed: n 1 Esiteks arvutan keskmise joone pikkuse D keskm...
Füüsika laboratoorne töö nr 5 Eritakistus Õppeaines: FÜÜSIKA II Mehaanikateaduskond Õpperühm: Kontrollis: Tallinn 2010 1. Töö eesmärk Traadi aktiivtakistuse määramine ampermeetri ja voltmeetri abil ning materjali eritakistuse leidmine. 2. Töövahendid Seade voltmeetri ja ampermeetriga takistustraadi materjali eritakistuse määramiseks, nihik. 3. Töö teoreetilised alused Pikkusega l ja ristlõikepindalaga S homogeense traadi takistus: (1) kus on traadi materjali eritakistus. Takistuse R määramiseks võib kasutada Ohmi seadust vooluringi osa kohta: (2) kus I on traati läbiva voolu tugevus ja U pinge traadilõigul. Viimased määrame ampermeetri ja voltmeetri abil. Mõõtmisel kasutame joonisel toodud lülitussüsteemi: Joonisel toodud lülituse korral näitab ampermeeter traati ja voltmeetrit läbivat vo...
Edited with the trial version of Foxit Advanced PDF Editor To remove this notice, visit: www.foxitsoftware.com/shopping Füüsika I kodune töö Ülesanne 1 Vabalt langev keha jõudis maapinnale langemise alguspunktist 10 s jooksul. Kui kõrge oli keha maapinnast, kui langemise algusest oli möödunud 5 sekundit. t1 m := 5s a := g = 9.807 2 t 2 := 10s v0 := 0 ...
Seminar 5 Nõudlus ja pakkumine 1. Kas kõrgharidusega IT spetsialistide arvu kasv suurendab nende nõudlust? Ei suurenda 2. Kas kauba pakkumise muutus toob automaatselt kaasa selle kauba nõudluse muutuse? Ei too 3. Kas selleks, et konstrueerida nõudluskõverat, peavad kõik nõudluse mõjurid ( (v.a. nõutav õ t hind hi d jja k kogus)) samaks k jää jääma? ? Nii see on 4. Kas siis, kui kauba hind on tasakaaluhinnast kõrgem, on nõutav kogus suurem kui pakutav kogus? Ei ole 5. Nisu pakkumise kasvu (pakkumiskõvera nihet) põhjustab: a) nisu käibemaksu tõus, b) nisukasvatuse tehnoloogia täiustumine, c) jäätise hinna langus, d)2 nisust valmistatud toodete nõudluse suurenemine. Lembit Viiulp PhD IT Kolledz 6. Kui valitsus kehtes...
1 - Ülevaade digitaalsidesüsteemidest. Edastuskanalite - - - , . 2- , , , tüübid. . 2- .. .: inf.source and input . , . ( , transducer -> source encoder -> shannel encoder ()-, . ) 0 ->digi.modulator -> channel -> digi.demodul. -> channel -Eg=(-,)g^2(t)dt. - 255 decoder -> sourc...
Füüsika laboratoorne töö nr 5 Eritakistus Õppeaines: FÜÜSIKA II Mehaanikateaduskond Õpperühm: Kontrollis: P.Otsnik Tallinn 2013 Töö eesmärk Traadi aktiivtakistuse määramine ampermeetri ja voltmeetri abil ning materjali eritakistuse leidmine. 1. Töövahendid Seade voltmeetri ja ampermeetriga takistustraadi materjali eritakistuse määramiseks, nihik. 2. Töö teoreetilised alused Pikkusega l ja ristlõikepindalaga S homogeense traadi takistus: (1) kus ρ on traadi materjali eritakistus. Takistuse R määramiseks võib kasutada Ohmi seadust vooluringi osa kohta: (2) kus I on traati läbiva voolu tugevus ja U – pinge traadilõigul. Viimased määrame ampermeetri ja voltmeetri abil. Mõõtmisel kasutame joonisel toodud lülitussüsteemi: Joonisel toodud lülituse k...
· ained koosnevad molekulidest(aatomitest). aatom koosneb elektronkattest ja aatomtuumast aatomtuumas on prootonid ja neutronid. Laeng -on füs. suurus ,mis näitab keha võimet osaleda elektromagneetilistes vastastkimõjudes. ühik: C tähis: q 1= 1,6 * 10(-19)C Voolutugevus- füs. suurus, näitab kui suur laeng läbib juhi ristlõiget 1 sek. jooksul. tähis: I ; ühik: A Kokkuleppeliselt on voolu suund vastupidine!! Coulombi seadus: Kahe keha vahel mõjuv jõud on võrdeline mõlema laengu korrutisega ja pöördvõrdeline nende vahelise kauguse ruuduga. Elektrostaatika uurib paigalseisvate laetud kehade uurimisega. Dielektriline läbitavus on füs suurus ,mis näitab mitu korda on elektriline jõud vaakumis suurem ,kui antud aines. tähis: E(ümar) Elektrostaatiline väli on mõjupiirkond,mis asub paigalseisvate laetud kehade vahel. Jõu suurus sõltub laengute vahelisest kaugusest. ...
1. Kahemuutuja funktsiooni integraalsumma mõiste ja geomeetriline sisu. · Olgu D kinnine tõkestatud piirkond ruumis R2. Olgu z = (x,y) piirkonnas D määratud pidev funktsioon. Jaotame piirkonna D n tükiks S1,S2,...,Sn.Tähistagu Si samaaegselt nii i-ndat tükki kui ka i-nda tüki pindala.Valime igalt tükilt ühe punkti P ja moodustame järgmise summa: Vn= (P1) S1 + (P2) S2+...+ (Pn) Sn Seda summat Vn nim funktsiooni integraalsummaks piirkonnas D · Olgu (x,y) 0. siis saab integraalsummas olevat korrutist (P i) Si tõlgendada kui silindri ruumala, mille põhi on S i ja kõrgus (Pi) Selline silinder tähistatakse Zi-ga. IntegraalsummaVn on järelikult silindrite ühendi Z=Z1 U Z2 U...U Zn ruumala. Silindrite ühend Z on treppkeha, mille ülemine pind on tükiti tasapinnalineomades hüppeid erinevate kõrgustega naaber silindrite liitekohtades. 2. Kahek...
Keha liikumisvõrrand r(t)=x(t)i+y(t)+z(t)k, kus x(t), y(t), z(t) on kolm sõltumatut funktsiooni. Teist järku diferentsiaalvõrrand (Newtoni II) r=a= d²r/dt² = 1/m *F Ruutpolünoomi r(t) = r0+v0+ a/2 *t² -ühtlaselt muutuva liikumise valemit, kus r0 algasend, v0 algkiirus, a kiirendus Keha pöörlemisvõrrand (t)=0 + 0 *t + /2 *t² - ühikud on radiaan Newtoni II seadus (kiirendus- ja impulssesitus) r=a= 1/m *F Impilss ehk liikumishulk p= mv Kulgliikumise diferentsiaalvõrrand a=1/m *F r= d²r/dt²=1/m *F Kulg diferentsvõrr lahendamine jõu puudumisel ning konstantse jõu korral (tuletusega) a) kui jõud on null, x=0 d/dt (dx/dt)=0 dx/dt=v0x=const, dx=voxdt voxdt=voxt+x0 , kus vox ja x0 on koordinadi väärtusega ajahetkel t=0. b) kui j]ud on konstantne (raskujõud: F=mg, hõõrdejõud: F=P), on võrrandi lahendiks polünoom x= x0 + vox*t + ax/2 *t²; ax=1/m *Fx Töö: skalaarkorrutis ja joonintegraal A=Fs=Fscos((Fs)), kus s=r=r2-r1 ning ((Fs)) tähistab vekt...
Xxxxx Yyyyy Monoliitsest raudbetoonist ribitaladega vahelae projekt Õppeaines: Ehituskonstruktsioonid Ehitusteaduskond Õpperühm: Juhendaja: Tallinn 200x.a. Sisukord: 1. Ülesanne..................................................................................................... 3 2. Plaadi dimensioneerimine .......................................................................... 4 3. Abitala dimensioneerimine ........................................................................ 6 4. Peatala dimensioneerimine ........................................................................ 9 5. Joonised.................................................................................................... 10 5.1. Vahelae plaan ......................................................................................
Iseseisev töö nr 2. Praktikum nr 2. χ²-, t- ja F- testi kasutamine hüpoteeside kontrollimisel. Usaldusintervallide leidmine. Karoliina Anier Geodeesia, I magister Eesmärk Praktikumiga nr 2 sarnaselt on iseseisva töö eesmärk tutvuda meetoditega, mille järgi saame otsustada, kas mõõtmisandmed ning valim on piisavalt tõesed. Selleks vaadeldakse usaldusintervalle. Järgnevalt püstitatakse usaldusintervalle, st määratakse mingi tõenäosusega kindlaks piirid ümber keskmise, dispersiooni, ja dispersioonide suhte, mille sees mingi tõenäosusega asub vastav tõeline väärtus. Sama on võimalik teha ka statistiliste hüpoteeside testimisega. Iseseisvas töös lahendatakse kolm ülesannet sarnaselt praktikum 2. Ülesanne 1 t- test. Üldkogumi keskmise hüpoteesi test t- test. Seda testi kasutatakse keskmiste võrdlemiseks (nt valimi ja üldkogumi keskmise), st vaadatakse, kas kaks võrreldavat keskmist on valitud usaldusnivool statistiliselt üksteise...
1. Kolmefaasilise asünkroonmootori nimiandmed on järgmised Võimsus Pn 7500 Pn 7500 W I ln = = =1 Pinge Un 400 3Uncos nn 34000, 890,85 Võimsustegur cos 0,89 nimivool Iln 14,3097 kasutegur n 0,85 Pn Pn60 750060 pöör.kiirus nn 1440 mootori nimimoment Tn 49,7359 Tn= Wn = n 2 =144023, 14 n Leida In ; f2n=? aeg. sek 60 rootorvoolu sagedus f2n 0,05 Sn= s n -n n 1512-1440 ...
Laboratoorne töö nr 1.0 Joone horisontaalprojektsiooni arvutamine Maastikul mõõdeti joont 0-6 korda. Selle joone üksikud lõigud on erinevate kalletega. Lõikude kalded on mõõdetud kraadides või meetrites (tabel 1.1). Leida antud joone pikkuse horisontaalprojektsioon kahel erineval viisil. Leida joone mõõtmise absoluutne ja suhteline viga. Tabel 1.1 Lähteandmed Punkti nr Joone pikkus Kõrguskasv ∆h (m), algpunktist kaldenurk v (kraadi) 0 0 +3,3° 1 59,0 -2,7° 2 107,0 +1,9° 3 164,0 +2,6 m 4 204,0 -4,9 m 5 254,0 -3,3 m 6 340,51 340,55 1 1 Leida: I S= ?, II S= ?, ∆d= ? (absoluutne viga), (suhteline viga) ...
TALLINNA TEHNIKAÜLIKOOL Käitismajanduse instituut Riski- ja ohutusõpetus Praktikum Elektriohutuse Kriteeriumid Tallinn, 2005 Teooria Peamisteks elektrikahjustuse ulatust mõjutavateks teguriteks on inimkeha läbiva voolu tugevus ja iseloom, voolu toime kestus, ümbritseva tootmiskeskkonna ja inimese individuaalsed iseärasused ning inimese kokkupuutumise tingimused vooluahelaga. Elektriohutuse kriteeriumiks nimetatakse kindla ajavahemiku jooksul inimkeha läbiva voolu lubatud tugevust. Vahelduvvoolu (sagedusel 50 Hz) jaoks on elektriohutuse kriteeriumid järgmised: · Kestvalt mõjuva elektrivoolu korral kõige väiksem inimesele füsioloogiliselt tajutav voolu tugevus (ärrituslävi) 1 mA; · 20...30 s vältel mõjuva elektrivoolu korral mittehalvava voolu lävi (voolutugevus 6 mA), sellise voolu ületamisel algavad lihaste krambid, kuid omal jõul vooluringist v...