ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
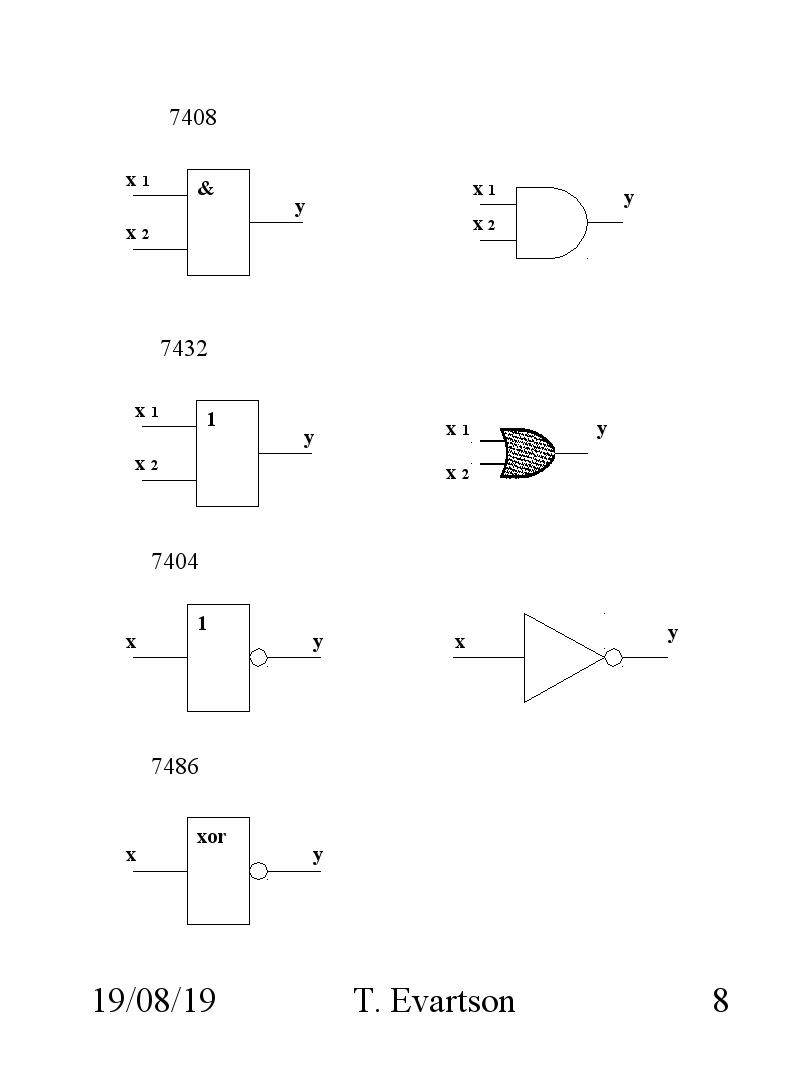
Loogilist liitmist nimetatakse ka disjunktsiooniks. Loogiline eitus (EI). EI-funktsioonil on argumendi vastandväärtus. Kui argument on 1, siis funktsioon võrdub 0 ning vastupidi. EI-tehet tähistatakse kriipsuga sümboli peal, näiteks argumendi x eitus on x . Loogilist eitust nimetatakse ka inversiooniks. Loetletud kolm loogikatehet moodustavad loogiliselt täieliku süsteemi, mida rakendades saab realiseerida mis tahes loogikafunktsiooni. Kõiki kolme loogika põhifunktsiooni on loogikaalgbra reeglite alusel võimalik realiseerida ainult üht tüüpi loogikaelementide kas NING-EI või VÕI-EI abil. Järelikult võib NING-EI- ja VÕI-EI-elemente ning tehteid nendega nimetada universaalseteks loogikaelementideks ja -teheteks. Lisaks põhifunktsioonidele leiavad kasutamist mitmed loogika tüüpfunktsioonid, nagu alternatiiv, ekvivalentsus, implikatsioon jt. Niisuguste funktsioonide ja elementide olemasolu lihtsustab loogikalülituste sünteesi
ANALÜÜTILINE GEOMEETRIA RUUMIS, VEKTORID VEKTORI MÕISTE, MOODUL JA SUUND Neid suurusi, mida on võimalik iseloomustada ühe arvuga, nimetatakse skalaarseteks (temperatuur, mass, töö). Suurusi, mille iseloomustamiseks on vaja arvu ja suunda, nimetatakse vektoriaalseteks (jõud, kiirus, kiirendus). Definitsioon. (Geomeetriliseks) vektoriks nimetatakse suunatud sirglõiku, lõiku, millel tehakse vahet alguse ja lõpu vahel. Kui vektori algus on punktis A ja lõpp punktis B, siis tähistatakse AB , a . Vektor on kindla sihi, suuna ja pikkusega lõik. Siht on teda kandva sirge siht. Suund on alguspunktist lõpp-punkti poole. Definitsioon. Vektori mooduliks nimetatakse tema pikkust, see on lõigu AB pikkust ja tähistatakse AB AB , a a . Vektori moodul on skalaarne mittenegatiivne suurus. Definitsioon. Nullvektoriks nimetatakse vektorit, mille algus- ja lõpp-punkt langevad kok
1. . . , ; - ; , 12. 2 p -n . -- , . . . , , . , . ., pnp npn. . , . . , 2 , pn . 7. ,
1 - Ülevaade digitaalsidesüsteemidest. Edastuskanalite - - - , . 2- , , , tüübid. . 2- .. .: inf.source and input . , . ( , transducer -> source encoder -> shannel encoder ()-, . ) 0 ->digi.modulator -> channel -> digi.demodul. -> channel -Eg=(-,)g^2(t)dt. - 255 decoder -> source decoder ->output transducer -> output
___.___ .. Mathcad 6.0 Plus 2001 2 621.391.2(07) .. : - Mathcad 6.0 Plus. , - , 2001. 189. : , , - - . Mathcad 6.0 Plus. . " - " , . . 2. . 155. .: 14 . .. , . . , . 3 1. 1.1. 1.1.1. -- x(t) = x(t+mT), T -- , m - - , m= 1, 2, .... x(t) - x(t ) = a 0 + (a k cos k1 t + b k sin k1 t ) =a 0 + A k cos(k1t + k ) (1.1) k =1 k =1 1 = 2 -- 1- ; a 0 , a k b k -- T , : t +T t +T t +T 1 2 2 a
LTMS.00.022 ÜHE MUUTUJA MATEMAATILINE ANALÜÜS Loengukursus Tartu Ülikooli loodus- ja täppisteaduste valdkonna üliõpilastele 2019./2020. õppeaasta Toivo Leiger Joonised: Ksenia Niglas Pisitäiendused 2016–20: Märt Põldvere, Natalia Saealle, Indrek Zolk, Urve Kangro 2 Sisukord 1 Reaalarvud 6 1.1 Järjestatud korpused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.1.1 Korpuse aksioomid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.1.2 Järjestatud korpus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.1.3 Täielik järjestatud korpus . . . . . . . . . . . . .
























Kõik kommentaarid