EESTI MAAÜLIKOOL Tehnikainstituut Madis Vitsut RIPPVAGONETI ELEKTRIAJAM
Kursuseprojekt
õppeaines „Tehnoloogiaseadmete
elektriajamid ”
TE.0023
Energiakasutuse eriala
EK MAG II
Üliõpilane:
“
“
2016 . a. ………… Madis Vitsut
Juhendaja : “
“
“
2016. a. …………
lektor Erkki
Jõgi
Tartu 2016
SISUKORD TÄHISED JA
LÜHENDID ........................................................................................................ 3
SISSEJUHATUS ........................................................................................................................ 5
1.
TEHNOLOOGIA KIRJELDUS ............................................................................................. 6
2. MOOTORI VÕIMSUSE ARVUTUS .................................................................................... 7
3. KOORMUSDIAGRAMM,
EKVIVALENTNE MOMENT JA VÕIMSUS ......................... 8
4. MOOTORI VALIMINE JA
MEHAANILINE TUNNUSJOON ......................................... 10
5. MEHAANILINE TUNNUSJOON ...................................................................................... 12
6.
INERTSIMOMENDI LEIDMINE ....................................................................................... 13
7.
AJAMI JUHTIMINE ........................................................................................................... 15
8.
ENERGIAKULU ................................................................................................................. 16
KOKKUVÕTE ......................................................................................................................... 17
KIRJANDUS ............................................................................................................................ 18
LISAD ...................................................................................................................................... 20
Lisa 1. Reduktori põhimõtteskeem....................................................................................21
Lisa 2. Trossajamiga rippvagoneti
juhtimisskeem ...........................................................22
Lisa 3. Ruumiplaan............................................................................................................23
TÄHISED JA LÜHENDID
A − aastane
tarbitav elektrienergia kulu, kW ∙ h
c − mootori põhimaterjali (malm)
erisoojus , c = 460 J/(kg∙K)
Dr − Veoratta läbimõõt, cm
d −
tapi läbimõõt, cm
f − hõõrdetegur
tugede kuullaagritest, 𝑓 = 0,1
g −
raskusjõud , N
h −
hammasratta paksus, m
J − süsteemi inertsmoment, kg∙m2
Ji − töömasina või ülekande pöörleva detaili inertsmoment, kg∙m2
Jm − mootori inertsmoment, kg∙m2
i −
ülekandearv mootorilt töömasinale
kp − tegur, mis
arvestab rattaäärikute ja –pukside takistust, 𝑘𝑝 = 2,75
M − leitav moment, N∙m
Mekv − ekvivalentne moment, N∙m
Mi − momendi väärtus i-ndas lõigus, N∙m
Mmax − mootori võllile taandatud töömasina maksimaalne moment, N∙m
Mpv − mehhanismi paigaltvõtumoment, N∙m
Mtn − töömasina takistusmoment nimipöörlemissagedusel, N∙m
Mts − töömasina staatiline takistusmoment, N∙m
m − koorma mass, kg
m0 − rippvagoneti mass koormata, kg
mk − sirgliikuva detaili mass, kg (
mk = 480 kg)
mn − mootori mass, kg
mr − hammasratta mass, kg
n − töömasina
pöörlemissagedus , s-1
ni − detaili pöörlemissagedus, s-1
nm − elektrimootori pöörlemissagedus, s-1
nn − nimipöörlemissagedus, s-1
nt − töömasina
vedava võlli pöörlemissadegus, s-1
Pekv − ekvivalentne võimsus, N∙m
Pi − momendi väärtus i-ndas lõigus, N∙m
Pn − mootori
nimivõimsus , W
Pt − rippvagoneti kogu
vajaminev võimsus, kW
Ptar − võrgust tarbitav võimsus, W
R − vedava
trumli raadius, m (
R = 0,1 m)
Rh − hammasratta raadius, m
Ts − soojenemise ajakonstant, s
t − tsükli kogu kestus, s
t1 − aeg teekonna läbimiseks söödahoidlast laudani, s
t2 − mahalaadimiseks kuluv aeg, s (𝑡2 = 30 s)
t3 − aeg ühest künast teiseni jõudmiseks, s
t4 − aeg tagasi liikumiseks väravani, s
t5 − aeg tagasi liikumiseks söödahoidlani, s
ti − i-nda lõigu kestus, s
tl − töö kestus ilma pausideta, s (𝑡𝑙 = 240 s)
V − hammasratta ruumala, m3
W −
takistusjõud , N
Wh − liikumistakistus, N
x −
astmenäitaja , milleväärtus sõltub töömasina liigist (x=2)
xk −
koormustegur , 𝑥𝑘 = 𝑃𝑒𝑘𝑣 /𝑃𝑛
xl − lubatav ülekoormatavus
α − tegur, mis arvestab pingekadu
α = 1,4
γ − kaotegur (püsiv- ja muutuvkadude suhe), 𝛾 = 0,7
δ − materjali tihedus (𝛿𝐹𝑒 = 7874 kg/m3)
ηm − ülekande kasutegur täiskoormusel, 𝜂𝑚 = 0,85
ηm1 − mootori kasutegur Pekv korral
ηn − mootori nimikasutegur
ϑe − mähistele lubatud ületemperatuur
μ − ratta hõõrdetegur, 𝜇 = 0,03
μk − mootori käivitusmomendi kordsus
μv − mootori väärtusmomendi kordsus
ρ − hammasratta inertsraadius, m
υ − tööorgani
joonkiirus , m/s
SISSEJUHATUS
Käesoleva kursuseprojekti eesmärgiks on
ratsionaalse automatiseeritud elektriajami
kavandamine ja arvutamine. Teemaks on vastavalt õpinguraamatu viimastele numbritele 42
„Rippvagoneti elektriajam“. Üherööpaline
rippvagonett on mõeldud loomade söötmiseks
laudas või sigalas. Ripptee
rööbas on riputatud ruumi lakke. Vagonett laaditakse täis
söödahoidlas ja tühjendatakse käsitsi
kümnes kohas võrdsete teepikkuste järel. Igas
mahalaadimiskohas kulub 30 s. Koormata vagoneti ja ajami mass on 240 kg. Rataste
veeretakistustegur f= 0,1. Asünkroonmootoriga ajam paikneb seinal ning vagonett on
trossveoga . [1]
Tabel 1.1. Lähteandmed [1]
Transporditava materjali mass, kg
260
Ripptee kogupikkus, m
130
Sellest laudas, m
42
Vagoneti
liikumiskiirus , m/s
1,2
Juhtimisskeemi nõuete
loetelu 2, 4, 5, 7
Automaatjuhtimisskeemile
esitatavate nõuete vastavad variandid:
1. Mootori juhtimine käsitsi distantsjuhtimispuldist ja vagoneti juurest.
2. Värava kohal toimub automaatne vagoneti seiskamine, kui värav ei ole täielikult
avatud.
3. Kaitse lühiste ja ülekoormuste eest.
4. Valgussignalisatsioon juhtimispuldis mootori töötamisel kummaski suunas ja
helisignaal enne mootori käivitamist. [1]
1. TEHNOLOOGIA KIRJELDUS
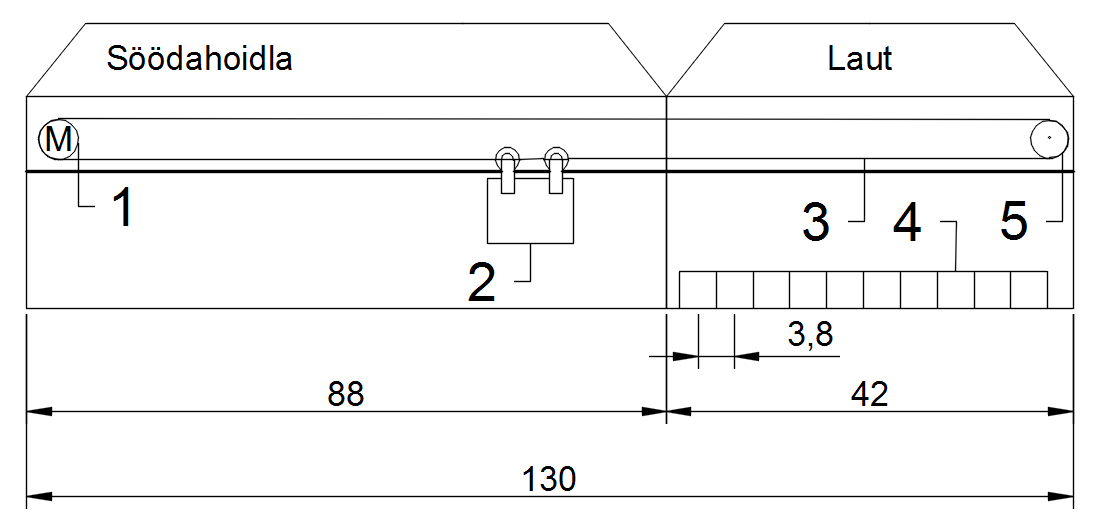
Rippvagonett (joonis 1.1) on sööda jaotamiseks mõeldud
transpordivahend , mis on kasutusel
sigalates või lautades. Vagonetiga süsteem on üldjuhul üsna töökindel ning võimaldab
loomapidamishoonetes maksimaalset ruumikasutus. Üheks puuduseks on rööbastee, mida
mööda rippvagonett liigub. Selleks kasutatav metalltala on raske ja lisa raskuseks on veel
vagonett koos söödaga. Selline lahendus nõuab kas väga tugevaid laekonstruktsioone või
erikonstruktsiooni käigutee riputamiseks. [2] Antud
variandis kirjeldatava trossajami
töökindluse kohta andmed puuduvad, kuna erialakirjandusest ei leitud näiteid sellise süsteemi
kasutamisest. Projekti tingimuste kohaselt täidetakse vagonett söödaga söödahoidlas ja sööt
transporditakse lauta kümnesse söödakünasse. Vagonetti liigutatakse käsijuhtimise teel
distantsjuhtimispuldist või vagoneti juurest ja seisatakse küna kohal.
Joonis 1.1. Projekteeritava rippvagoneti tehnoloogiaskeem: 1 – elektriajam, 2 – rippvagonett,
3 – veotross, 4 – söödakünad, 5 – pingutusratas.
2. MOOTORI VÕIMSUSE ARVUTUS
Rippvagoneti liigutamiseks mööda rööbast kasutatakse antud töös trossajamit, mille võimsuse
leitakse kasutades elektritali veoajami ning kraana plokirattaga tõstemehhanismi
kombineeritud analoogiaid. Liikumistakistus, mis tuleneb vagoneti veeremist leitakse
järgmiselt: [3]
2𝜇 + 𝑑𝑓
2 ∙ 0,03 + 3 ∙ 0,1
𝑊 = 𝑘𝑝 𝑚 + 𝑚0
= 2,75 ∙ 260 + 240
= 16,5 N,
𝐷
(2.1)
𝑟
30
kus 𝑊 on liikumistakistus, N;
𝑘𝑝 − tegur, mis arvestab rattaäärikute ja –pukside takistust, 𝑘𝑝 = 2,75 [3];
𝑚
− koorma mass, kg;
𝑚0 − rippvagoneti mass koormata, kg;
𝜇
− ratta hõõrdetegur, 𝜇 = 0,03 [3];
𝑑
− tapi läbimõõt, cm;
𝑓
− hõõrdetegur tugede kuullaagritest, 𝑓 = 0,1 [3];
𝐷𝑟 − käiguratta läbimõõt, cm.
Kuna
sõidutee kaldenurk on 0, siis sõidutee kaldenurgast tingitud liikumistakistust ei ole, kuid
vajalik on leida trossajami tõttu tekkiv takistus. Piisava tugevuse peaks tagama 6,4 mm
jämedune
tross kaaluga 0,16 kg/m ning
trossi pikkuseks on võetud 261 m [4]:
𝑊𝑡𝑟 = 𝑚𝑡𝑟 ∙ 𝜇𝑡𝑟 = 41,76 ∙ 0,962 = 40,17 N,
(2.2)
kus
𝑊𝑡𝑟 on Trossajami liikumistakistus, N;
𝑚𝑡𝑟 − trossi mass, kg;
𝜇𝑡𝑟 − Kasutegur ühe plokirattaga trossisüsteemis, 𝜇 = 0,962 [5];
Kogu liikumistakistus on osatakistuste summa:
𝑊 = 𝑊𝑡𝑟 + 𝑊 = 40,17 + 16,50 = 56,67 N,
(2.3)
kus W
on Kogu liikumistakistus, N.
Seega saab arvutada ajami vajamineva võimsuse: [3]
𝑔𝑊𝜐
9,8 ∙ 56,67 ∙ 1,2
𝑃𝑡 =
= 784,1 W ≈ 0,784 kW,
𝜂
(2.4)
𝑚
0,85
kus 𝑃𝑡 on rippvagoneti kogu vajaminev võimsus, kW;
𝑔
− raskusjõud, kg/N;
𝜂𝑚 − ülekande kasutegur täiskoormusel, 𝜂𝑚 = 0,85 [3].
Vastavalt valemile 2.4 on staatiline võimsus 785 W.
3. KOORMUSDIAGRAMM, EKVIVALENTNE MOMENT JA VÕIMSUS Töömasina koormusdiagrammi saamiseks leitakse selle takistusmomendi
sõltuvus ajast
𝑀 = 𝑓(𝑡). Antud näite puhul puhul on tegu ajas
muutliku astmelise koormusdiagrammiga,
mis saadakse momendi taandamisega töömasina võllile. Kogutöötsükli
osadeks on vagoneti
liikumine söödahoidlast laudani, kus suletud värava korral toimub peatumine, distantsiks 88m
ning ajakulu ettenähtud kiirusel 73,33 s. Edasi liigub vagonett 3,8m vahedega,
ajaga 3,17 s
niiviisi 10 korda ning seejärel 42m tagasi lauda väravani, milleks kulub 35 s ja lõpuks tagasi
söödahoidlasse 88m, 73,33 s.Tsükli kogu kestus leitakse järgmiselt:
𝑡 = 𝑡1 + 10 ∙ 𝑡2 + 10 ∙ 𝑡3 + 𝑡4 + 𝑡5 =
= 73,33 + 10 ∙ 30 + 10 ∙ 3,17 + 35 + 73,33 = 540 s,
(3.1)
kus 𝑡
on tsükli kogu kestus, s;
𝑡1 − aeg teekonna läbimiseks söödahoidlast laudani, s;
𝑡2 − mahalaadimiseks kuluv aeg, s (𝑡2 = 30 𝑠) [1];
𝑡3 − aeg ühest künast teiseni jõudmiseks, s;
𝑡4 − aeg tagasi liikumiseks väravani, s;
𝑡5 − aeg tagasi liikumiseks söödahoidlani, s.
Vastavalt valemile 2.3 on leitud takistusjõud iga tsükli kohta, mis arvestab koorma massi
vähenemisega.. Töömasina võllile taandatud momendid on leitud järgmiselt [3]:
𝑃
𝑀 =
𝑡𝑛
2 ∙ 𝜋 ∙ 𝑛
(3.2)
𝑛
kus 𝑀
on leitav staatiline takistusmoment, N∙m;
𝑃𝑡𝑛 − staatiline võimsus, W;
𝑛𝑛 − Töömasina nimipöörlemissagedus 1/s.
Tabel 3.1. Iga tsükli koorma mass, takistusjõud, tsükli kestus ja arvutatud moment
Takistus,
Staatiline
Momendi nr
Aeg, s
Mass, kg
Moment, N∙m
N
võimsus, W
M1
73,33
500
56,67
784,05
98,07
M2
76,5
500
56,67
784,05
98,07
M3
109,67
474
55,812
772,18
96,59
M4
142,84
448
54,954
760,30
95,10
M5
176,01
422
54,096
748,43
93,62
M6
209,18
396
53,238
736,56
92,13
M7
242,35
370
52,38
724,69
90,65
M8
275,52
344
51,522
712,82
89,16
M9
308,69
318
50,664
700,95
87,68
M10
341,86
292
49,806
689,08
86,19
M11
375,03
266
48,948
677,21
84,71
M12
440,03
240
48,09
665,34
83,23
M13
513,36
240
48,09
665,34
83,23
Tabelis 3.1 on välja toodud kõik tsüklide momendid, välja arvatud sööda maha
laadimise ajal,
sest siis rippvagonet seisab ja moment on null. Joonisel 3.1 arvutatud tulemustest koostatud
koormusdiagramm.
100
90
80
70
60
m
N∙ 50
M, 40
30
20
10
0
0
100
200
300
400
500
t, s
Joonis 3.1. Rippvagoneti koormusgraafik
Astmeline koormusdagramm joonisel 3.1 tuleb
asendada ekvivalentsete suurustega, mis on
vajalikud mootori valimisel. Ekvivalentsed suurused kujutavad endast kaalutud ruutkeskmisi.
Ekvivalentne moment leitakse järgmiselt: [1,3]
𝑀2 ∙ 𝑡
𝑀
𝑖
𝑖
𝑒𝑘𝑣 =
𝑡
(3.3)
𝑖
kus 𝑀𝑒𝑘𝑣 on ekvivalentne moment, N∙m;
𝑀𝑖
− momendi väärtus i-ndas lõigus, N∙m;
𝑡𝑖
− i-nda lõigu kestus, s.
Tehti arvutused vastavalt valemile 4.3, arvestades tulemusi tabelist 4.1 ja
valemist 4.1, ning
ekvivalentseks momendiks saadi 57,9 N∙m. Mootori ekvivalentne võimsus on leitav järgmise
valemi abil [3]:
𝑃2 ∙ 𝑡
𝑃
𝑖
𝑖
𝑒𝑘𝑣 =
𝑡
(3.4)
𝑖
kus 𝑃𝑒𝑘𝑣 on ekvivalentne võimsus, N∙m;
𝑃𝑖
− momendi väärtus i-ndas lõigus, N∙m;
Vastavalt valemile 4.4 tuli ekvivalentseks võimsuseks 462,88 W. Ekvivalentse võimsuse järgi
valitakse mootor ja ka arvutatakse energiakulu.
4. MOOTORI VALIMINE JA MEHAANILINE TUNNUSJOON
Mootori
esmasel valikul põhineti leitud staatilisele võimsusele ning ekvivalentsele võimsusele
arvestades, et mootori nimivõimsus ületaks neid. Talitluse tüübiks valiti lühiajaline talitlus
tähendab, et mootor töötab lühikest aega ning sellel järgneb
paus , mille kestel jahtub
keskkonna temperatuurini, samas ei saavutata töötemperatuuri. Esmase mootorivaliku
tulemusena leitud mootori andmed on toodud tabelis 4.1. [1,3]
Tabel 4.1. ABB M2BA 80 MA andmed [6]
Parameeter Väärtus
Pn, kW
0,55
nn, min-1, s-1
1415 ≈ 23,58
ηn, %
74,5
cosφn 0,73
In, A
1,45
Mn, N.m
3,7
μk 2,0
μv 2,8
J, kg.m2
0,00144
mm, kg
15
Isolatsiooni klass
F
Mootori nimiparameetreid kasutati soojenemise ajakonstandi arvutamiseks[1]:
𝑐𝑚
460 ∙ 15 ∙ 388,16 ∙ 0,745
𝑇
𝑛 𝜗𝑒 𝜂𝑛
𝑠 =
= 14227,0 s,
𝑃
(4.1)
𝑛 (1 − 𝜂𝑛 )
550 ∙ (1 − 0,745)
kus 𝑇𝑠
on soojenemise ajakonstant, s;
𝑐
− mootori põhimaterjali erisoojus, c = 460 J/(kg∙K) [7];
𝑚𝑛 − mootori mass, kg;
𝜗𝑒
− mähistele lubatud ületemperatuur, 𝜗𝑒 = 388,16 𝐾 [8];
𝜂𝑛
− mootori nimikasutegur;
𝑃𝑛
− mootori nimivõimsus, W.
Leitud ajakonstant ületab oluliselt töötsükli 513 s, seega on tegemist lühiajalise tööga S2.
Mootori võllile taandatud maksimaalne moment, mis on võrdne ka paigaltvõtu momendiga,
leiti vastavalt valemile 4.2. [8]:
𝑀
57,9
𝑀
1
𝑚𝑎𝑥 = 𝑀𝑝𝑣 =
= 3,67 N ∙ m,
𝑖 ∙ 𝜂
(4.2)
ü18,52 ∙ 0,85
kus 𝑀𝑚𝑎𝑥 on
mootori võllile taandatud töömasina maksimaalne moment, N∙m;
𝑀𝑝𝑣 −
mootori võllile taandatud töömasina paigaltvõtumoment N∙m.
Valitud mootorit kontrollitakse mehaanilise ülekoormuse järgi käivitamisel ja töötamisel [1]:
𝑀𝑛 ∙ 𝜇𝑘 ≥ 𝛼 ∙ 𝑀𝑝𝑣 ⟹ 3,7 ∙ 2,0 ≥ 1,4 ∙ 3,67 ⟹ 7,4 ≥ 5,138,
(4.3)
𝑀𝑛 ∙ 𝜇𝑣 ≥ 𝛼 ∙ 𝑀𝑚𝑎𝑥 ⟹ 3,7 ∙ 2,8 ≥ 1,4 ∙ 3,67 ⟹ 10,36 ≥ 5,138,
(4.4)
kus 𝛼
– tegur, mis arvestab pingekadu
α = 1,4 [1];
𝜇𝑘 – mootori käivitusmomendi kordsus;
𝜇𝑣 – mootori väärtusmomendi kordsus.
Lubatav ülekoormus leiti vastavalt valemile [3]:
𝛾 + 1
0,7 + 1
𝑥𝑙 =
− 𝛾 =
− 0,7 = 10,002,
1 − 𝑒−𝑡
𝑙/𝑇𝑠
1 − 𝑒−243/14227
(4.5)
kus 𝑥𝑙 on lubatav ülekoormatavus;
𝛾 − kaotegur (püsiv- ja muutuvkadude suhe), 𝛾 = 0,7 [9];
𝑡𝑙 − töö kestus ilma pausideta, s (𝑡𝑙 = 243 𝑠).
Valitud mootori sobivuse kinnituseks viimane tingimus:
𝑃
462,88
𝑃
𝑒𝑘𝑣
𝑛 ≥
⟹ 550 ≥
⟹ 550 ≥ 46,28
𝑥
(4.6)
𝑙
10
Kuna töömasina võlli pöörlemissagedus jääb alla 1000 min-1, kasutatakse vastavalt juhendis
toodud soovitusele suurema kiirusega asünkroonmootorit ja vaheülekannet, mis tagab
tehnilise ja majandusliku otstarbekuse. Kuna projekteeritava rippvagoneti nõutud
liikumiskiirus on 1,2 m/s, siis töömasinale sobiva kiiruse saavutamiseks kasutatakse
reduktorit. Selle valimise
eelduseks on töömasina vedava võlli pöörlemissageduse leidmine
[1]:
𝜐
1,2
𝑛𝑡 =
= 1,273 s−1,
2 ∙ 𝜋 ∙ 𝑅
2 ∙ 𝜋 ∙ 0,15
(4.7)
kus 𝑛𝑡 on töömasina vedava võlli pöörlemissadegus, s-1;
𝜐 − tööorgani joonkiirus, m/s (1,2 m/s);
𝑅 − Trossi vedava trumli raadius, m (0,15 m).
Ülekandearv leitakse järgmise valemiga [1]:
𝑛
1415
𝑖 = 𝑚 =
= 18,52,
𝑛
𝑡
60 ∙ 1,273
(4.8)
kus 𝑖
on ülekandearv mootorilt töömasinale;
𝑛𝑚 − elektrimootori pöörlemissagedus, s-1.
5. MEHAANILINE TUNNUSJOON
Töömasina mehaaniliseks tunnusjooneks nimetatakse tema takistusmomendi sõltuvust
ajamivõlli pöörlemissagedusest. Töömasina mehaaniline tunnusjoon leitakse valemiga [1]:
𝑛
𝑀𝑡𝑠 = 𝑀𝑝𝑣 + 𝑀𝑡𝑛 − 𝑀𝑝𝑣 ∙ ( )𝑥,
𝑛
(5.1)
𝑛
kus 𝑀𝑡𝑠 on töömasina staatiline takistusmoment, N∙m;
𝑀𝑝𝑣 − mehhanismi paigaltvõtumoment, N∙m;
𝑀𝑡𝑛 − töömasina takistusmoment nimipöörlemissagedusel, N∙m;
𝑛
− töömasina pöörlemissagedus, s-1;
𝑛𝑛
− nimipöörlemissagedus, s-1;
𝑥
− astmenäitaja, milleväärtus sõltub töömasina liigist (x=2) [1].
Paigaltvõtumomendi leidmiseks on vaja arvutada töömasina takistusmoment [1]:
𝑃
550
𝑀
𝑛
𝑡𝑛 =
= 3,71.
2𝜋𝑛
(5.2)
𝑛
2 ∙ 𝜋 ∙ 23,58
Liikurmehhanismi paigaltvõtumoment on leitud vastavalt [1]:
𝑀𝑝𝑣 = 0,55 ∙ 𝑀𝑡𝑛 = 0,55 ∙ 3,71 = 2,04.
(5.3)
2,046
2,045
2,044
m 2,043
N∙
2,042
Mts,
2,041
2,04
2,039
0
0,2
0,4
0,6
0,8
1
1,2
1,4
n, s-1
Joonis 5.1. Töömasina mehaaniline tunnusjoon
Vastavalt valemile 5.1 on leitud mehaaniline tunnusjoon, kus pöörlemissagedused on pandud
nullist kuni nimipöörlemissageduseni. Mehaaniline tunnusjoon on kujutatud joonisel 5.1.
6. INERTSIMOMENDI LEIDMINE
Reduktori põhimõtteline skeem on toodud
lisas 1. Reduktor koosneb kaheksast silindrilisest
hammasrattast, mille tulemusena saab mootori pöörlemiskiirusest 23,58 s-1 trossi veorattale
edasi anda kiiruse 1,273 s-1. Süsteemi
inertsimoment leitakse järgmise valemiga [1]:
𝑛 2
𝜐2
𝐽 = 𝐽
𝑖
𝑚 + Σ𝐽𝑖
+ Σ𝑚
𝑛
𝑘
2
(6.1)
𝑛
4𝜋2𝑛𝑛
kus 𝐽
on süsteemi inertsmoment, kg∙m2;
𝐽𝑚 − mootori inertsmoment, kg∙m2;
𝐽𝑖
− töömasina või ülekande pöörleva detaili inertsmoment, kg∙m2;
𝑛𝑖 − detaili pöörlemissagedus, s-1;
𝑚𝑘 − sirgliikuva detaili mass, kg (550 kg).
Üksikute detailide ehk selle ülesande kohaselt hammasrataste inertsimoment on [1]:
𝑅2
𝐽
𝑖 = 𝑚 ∙ 𝜌2 = 𝑚 ∙
2
(6.2)
kus
𝜌 on hammasratta inertsraadius, m.
Silindrilise keha mass, mis on vajalik inerstimomendi leidmiseks, saadakse:
𝑚
2
𝑟 = 𝑉 ∙ 𝛿 = 𝜋 ∙ 𝑅 ∙ ∙ 𝛿,
(6.3)
kus 𝑚𝑟 on hammasratta mass, kg;
𝛿
− materjali tihedus (𝛿𝐹𝑒 = 7874 kg/m3);
𝑉
− hammasratta ruumala, m3;
𝑅 − hammasratta raadius, m;
− hammasratta paksus, m.
Vastavalt valemitele 6.2 ja 6.3 leitud tulemused on kantud tabelisse 6.1.
Tabel 6.1. Reduktori hammasrataste ja veoratta andmed ning inertsimoment
Jrk.
Raadius Paksus
Mass
Pöörlemis-
Inertsiraadiuse
Inertsimoment
Ruumala V, m3
nr.
R, m
h, m
m, kg
sagedus n, s-1
ruut ρ2, m2
J, kg∙m2
1
0,015
0,003
0,00000212
0,02
23,58
0,00011
0,000002
2
0,03
0,003
0,00000848
0,07
11,79
0,00045
0,000030
3
0,015
0,003
0,00000212
0,02
11,79
0,00011
0,000002
4
0,03
0,003
0,00000848
0,07
5,90
0,00045
0,000030
5
0,015
0,003
0,00000212
0,02
5,90
0,00011
0,000002
6
0,03
0,003
0,00000848
0,07
2,95
0,00045
0,000030
7
0,015
0,003
0,00000212
0,02
2,95
0,00011
0,000002
8
0,035
0,003
0,00001138
0,09
1,273
0,00060
0,000054
Vastavalt valemile 6.1, kasutades tabelist 6.1 leitud andmeid, leiti kogu süsteemi
inertsimoment:
𝑛 2
𝜐2
23,58 2
𝐽 = 𝐽
𝑖
𝑚 + Σ𝐽𝑖
+ Σ𝑚
= 0,00144 + 0,000002
+
𝑛
𝑘
2
𝑛
4𝜋2𝑛𝑛
23,58
11,79 2
11,79 2
5,90 2
5,90 2
+0,00003
+ 0,000002
+ 0,00003
+ 0,000002
+
23,58
23,58
23,58
23,58
2,95 2
2,95 2
1,273 2
+0,00003
+ 0,000002
+ 0,000054
+
23,58
23,58
23,58
1
+550 ∙
= 0,026509 𝑘𝑔 ∙ 𝑚2
4 ∙ 𝜋2 ∙ 556,02
Kogu süsteemi inertsimoment on 0,026509 kg∙m2.
7. AJAMI JUHTIMINE
Mootori kaitseks lühiste ja ülekoormuse eest on kasutatud mootorikaitselülitit. Vagoneti
juhtimiseks on kaks võimalust. Esimene distantsjuhtimispuldist, mis paikneb
automaatikakilbil ning vagoneti juurest raadiopuldiga. Juhtimissüsteemi valik toimub ohutuse
tagamiseks automaatikakilbilt võtmega lüliti abil. Esimese positsiooni korral on valitud
distantsjuhtimispult, kus vastavalt
surunupplüliti SK2.1 on edasi liikumiseks ning SK2.2
tagasi liikumiseks. Lõpulüliti LS1 abil kontrollitakse värava avatud olekut. Kui värav on kinni
on LS1 avatud olekus. Jõudes lauda väravani rakendub Lõpulüliti SK3.1 ning enne väljumist
SK3.2, mis seiskavad mootori värava suletud oleku korral. Kui värav on avatud jätkub
liikumine ning olenevalt
suunast antakse helisignaal
viitega avanevate lülitite kaudu S2 või S4
pasunani. Viitega sulguvate lülitite S1 ja S3 viiteaeg peab olema veidi suurem S2, S4
avanemisajast.
Tabel 7.1. Valitud komponentide loetelu [6,10-24]
Kogus,
Positsioon
Nimetus
Mudel
Tootja
tk
M1
Mootor
1
M2BA 80 MA
ABB
KM1, KM2
Kontaktor 2
VB6-30-10-P-01
ABB
F2F
Mootorikaitse
1
MS116-1.6
ABB
F1
Kaitselüliti 1
S203-C10
ABB
F2
Kaitselüliti
1
S201-C10
ABB
S1, S3
Viitega lüliti NO
2
CT-ERD.12
ABB
S2, S4
Viitega lüliti NC
2
CT-AHD.12
ABB
S5
Avariistopp
1
INCA1
ABB
SS1
Võtmega lüliti
1
M2SSK2-101
ABB
SK2.1, SK2.2
Surunupplüliti
2
XB7NA15341
SCHNEIDER
H1...H2
Märgutuli
2
KL70-123L
ABB
P2
Signaalpasun
1
WERMA 230V 92dB
WERMA
LS1
Lõpulüliti
2
LS31P10B11
ABB
SK4.2
Lõpulüliti
2
LSC40PC11
ABB
KM3.1
Kaugjuhtimispult
1
PN-TX-MD3
TeleRadio
KM3
Vastuvõtja 1
PN-RX-MN5
TeleRadio
Pärast helisignaali rakendub vastav kontaktori
mähis olenevalt liikumissuunast kas KM1 või
KM2. Kui juhtpuldi valik võtmega lüliti SS1 on raadiojuhtimis asendis jäetakse juhtskeemist
välja surunupplülitid, mille asemel
toimivad kaugjuhtimispuldi nupud SK4.1 või SK4.2.
Juhtimisskeem on toodud lisas 2.
8. ENERGIAKULU
Energiakulu arvutamisel arvestatakse, et loomi toidetakse 8 korda päevas. [25] Mootori
tööaeg aastas leitakse valemi 8.1 järgi:
8 ∙ 𝑡
8 ∙ 243
𝑡
𝑙
𝑎 =
∙ 365 =
∙ 365 = 197,1 h,
3600 3600
(8.1)
kus 𝑡𝑎 on mootori aastane tööaeg, h;
Ekvivalentne võimsus on leitud valemis 4.3 ja see on 462,8 W. Kui ekvivalentne võimsus
erinev nimivõimsusest, siis on kasutegur leitav järgmiselt [1]:
1
1
𝜂𝑚1 =
𝑥
= 0,739,
𝑘
0,84
1 − 𝜂
(8.2)
1 +
𝑛
𝛾 + 𝛾
1 − 0,745 0,7 + 0,7
𝜂
1 +
𝑛
𝑥𝑘 + 1
0,745 0,84 + 1
kus 𝑥𝑘 on koormustegur, 𝑥𝑘 = 𝑃𝑒𝑘𝑣 /𝑃𝑛.
Tarbitav võimsus on seega:
𝑃
462,8
𝑃
𝑒𝑘𝑣
𝑡𝑎𝑟 =
= 626,3 W ≈ 0,626 kW,
𝜂
(8.3)
𝑚1
0,739
kus 𝑃𝑡𝑎𝑟 on võrgust tarbitav võimsus, W;
𝜂𝑚1 − mootori kasutegur Pekv korral.
Rippvagoneti aastane energiakulu avaldub järgmiselt [1]:
𝐴 = 𝑡𝑎 ∙ 𝑃𝑡 = 197,1 ∙ 0,626 = 123,4 𝑘𝑊 ∙ ,
(8.4)
kus
𝐴 on aastane tarbitav elektrienergia kulu, kW ∙ h.
Valemist 8.4 avaldub, et projekteeritava rippvagoneti aastane elektrienergia kulu on
123,4 kW∙h.
KOKKUVÕTE
Kursusetöös leiti trossajamiga rippvagonetile, mida kasutatakse sigalates sööda jaotamiseks,
sobilik elektriajam. Vastavalt arvutustele osutus sobilikuks 0,55 kW ABB mootor M2BA
80MA. Nõutud liikumiskiirese 1,2 m/s saavutamiseks arvutati ka sobiliku reduktori
parameetrid. Koostati süsteemi juhtimisskeem, mis võimaldab vagoneti liigutamist nii
automaatikakilbil asuvast distantsjuhtimispuldist kui ka vagoneti juurest kaugjuhtimispuldist.
Leitud aastane elektrienergiakuluks saadi 123,4 kW∙h. Üldine ruumiplaan on esitatud lisas 3.
Eesmärgiks seatud ratsionaalse ajami leidmine sai täidetud, pidades silmas ette antud nõudeid.
KIRJANDUS
1.
Liiske , M. Elektriajamite kursuseprojekti ülesanded ja koostamisjuhend.Tartu, EMÜ,
2005. 39 lk.
2. Veinla, V. Farmide mehhaniseerimine. – Tln.: Valgus, 1987.
3. Liiske, M. Tehnoloogiaseadmete elektriajamid. I osa. – Tartu:
EPMÜ , 1998. 98 lk.
4. The
Engiineering
Toolbox.
Wire Rope
–
Strength .
Kättesaadav:
http://www.engineeringtoolbox.com/wire-rope-strength-d_1518.html (11.01.2016)
5. Gabolde, G., Nguyen, J-P. Drilling Data
Handbook .
Paris , IFP, 2006. 74 lk.
Kättesaadav:
https://books.google.ee/books?id=u8cMooI1S_IC&lpg=RA4-PA3&dq= Efficiency%20of%20Wire%20Rope%20Reeving&pg=PP1#v=onepage&q=Efficiency
%20of%20Wire%20Rope%20Reeving&f=
false (11.01.2016)
6. ABB. Low
voltage general
performance IE2 high efficiency motors according to EU
MEPS. Kättesaadav:
http://www.elektroskandia.ee/pub/tooted/toostus/General_perfor mance_IE2_motors_EU_MEPS_9AKK105789_EN_01_2013_Rev_A.pdf (20.12.14).
7. The
Engiineering
Toolbox.
Metals –
Specific Heats.
Kättesaadav:
http://www.engineeringtoolbox.com/specific-heat-metals-d_152.html (20.12.14).
8. Liiske, M. Elektriajamid. Trt.: EPMÜ Kirjastus, 2001. 254 lk
9. Liiske, M. Elektriajamite ülesanded. – 32 lk.
10. Reversing Contactors. Kättesaadav:
http://www.abb.com/product/seitp329/4ca72 220d6dd2dc5c12579140032cd3d.
aspx ?tabKey=2&gid=ABB.BBCGJL1211909R0101
&cid=9AAC100159 (18.01.2016)
11. Tootekaart. – Elektroskandia. Kättesaadav:
http://www.elektroskandia.ee/hinnakiri/ kood/370002044 (18.01.2016)
12. Data Sheet. Kättesaadav:
http://new.abb.com/products/ABB2CDS253001R0104 (18.01.2016)
13. Data Sheet. Kättesaadav:
http://new.abb.com/products/ABB2CDS251001R0104 (18.01.2016)
14. Electronic Timers, CT-D range. Kättesaadav:
http://new.abb.com/products/ABB2CD S251001R0104 (18.01.2016)
15. The electronic timers with MDRC design. Kättesaadav:
http://new.abb.com/low -
voltage/
products /electronicrelays/electronic-timers/ct-d (18.01.2016)
16.
Emergency stop for enclosure installation Kättesaadav:
http://new.abb.com/low -
voltage/products/
safety -products/emergency-stops-and-
pilot -devices/
inca (18.01.2016)
17. Pilot
Devices
-
Modular
Range.
Kättesaadav:
http://www.abb.com /product/seitp329/cbe5e0c2634c6ad3c12577ca004f5f10.aspx?tabKey=2&gid=ABB1S
FA611281R1001&cid=9AAC100141 (18.01.2016)
18. Tootekaart.
– Elektroskandia. Kättesaadav:
http://www.elektroskandia.ee/ hinnakiri/kood/230003356 (18.01.2016)
19.
Signal towers and
beacons.
Kättesaadav:
http://new.abb.com/low -
voltage/products/pilot-devices/signaling-devices (18.01.2016)
20. Signaalpasun.
Kättesaadav:
http://www.westbalt.eu/store/index.php/signal-horn -
werma-230v-92db.html (18.01.2016)
21. Data Sheet. Kättesaadav:
http://new.abb.com/products/ABB1SBV010110R1211 (18.01.2016)
22. ABB
Limit switches.
Kättesaadav:
https://library.e.abb.com/public/ 3cd6d72407282b0385257af60077244c/1SXU000023C0202%20RevA_08_Limit%20s
witches .pdf (18.01.2016)
23. Saatja Panther IP67 . Kättesaadav:
http://www.tele-radio.com/ee/tooted/ (18.01.2016)
24. Vastuvõtja Panther. Kättesaadav:
http://www.tele-radio.com/ee/tooted/ (18.01.2016)
25. Liiske, M. Tehnoloogiaseadmete elektriajamid. II osa. – Tartu: EPMÜ, 2001. 81 lk.
LISAD

































Kõik kommentaarid