Geostatsionaarsete satelliitide kõrguseks on planeeritud 35 800 km, nende trajektoorid on konstantsetel laiustel ja tiirlemisaeg ühtib Maa pöörlemisajaga, nii et nad "ripuksid" teatud punktides Lõuna-Euroopa, Kesk-aafrika ja Lõunamere kohal. Geosünkroonsed on planeeritud joonestama kaheksaid Atlandi ookeani, Lääne-Euroopa ja Lääne-aafrika ning Ida-Euroopa, Lääne- Aasia ja India ookeani kohal. GALILEO peaks saama valmis 2008. aastaks.GPS, GLONASS ja ENSS moodustaksid koos nn. GNSS (Global Navigation Satellite System). Kokkuvõte Käes oleva töö eesmärk oli anda ülevaade asukohamääramise süsteemist GPS ja luua materjal, millest oleks kasu kõikidel huvilistel ja ka mõne mõõtmistega seotud aine õpilastel. Tööd on hea kasutada lisamaterjalina, kuna vaatamata süsteemipopulaarsusele on eesti keelset materjali siiski vähe. Töö kirjutamisel püüdsin tuua välja huvitavamaid aspekte GPS süsteemitekkeloost ning kasutusvaldkondadest. Huvilised saavad
1. Millistest komponentidest koosneb Maa leida: joonepikkus S1-2, otse ja vastuasimuudid A1-2 Epohh – sündmuse juhtumise moment raskusjõud (raskuskiirendus)? Millest kumbki A2-1 teatud ajaskaala suhtes. komponent oleneb? Mis on raskusjõu (-kiirendus) 29. Mis on võetud GPS standardepohhiks? ühik ja selle dimensioon? F – Maa . Millistes ühikustes mõõdetakse GPS aeg? gravitatsioonilisest külgetõmbejõust ja P – Maa GPS standardepohh on 06.jaanuar 1980 kell pöörlemisest tingitud tsentrifugaaljõust. F oleneb 0 UT. Sellest nullhetkest alates näidatakse anomaalsete tiheduste jaotusest ja pinnavormidest, P
Referaat GPS ja Navigatsioonisüsteem Renault Espace-l Õppeaines: Auto lisa- ja mugavusseadmed Tallinn 2008 Sisukord Mis on GPS?........................................................................................................................ 3 Süsteemi areng.....................................................................................................................3 Kuidas GPS töötab? ............................................................................................................4 Kuidas kontrollida GPSi näidu täpsust?............................................................................ 5 Renault ESPACE Navigatsiooni süsteem............................................................................6 Ekraan ............................................................................................................................. 9 Klaviatuur...................
Sissejuhatus Globaalne asukoha määramise süsteem (GPS) on kosmosepõhine globaalne navigatsiooni satelliidi süsteem. See võimaldab asukoha ja aja info kättesaadavuse ka halva ilmaga, igal ajal ja igal pool üle Maa (või selle lähedal), kui on nähtavuses vähemalt neli satelliiti (orbiidil liigub korraga vähemalt neli või rohkem GPS satelliiti). See süsteem on vabalt kättesaadav kõigile, kellel on GPS vastuvõtja. GPS loodi ja realiseeriti Ameerika Ühendriikide Kaitseministeeriumi poolt ning originaalselt oli kasutuses 24 satelliidiga, mis asusid 20 200 km kõrgusel. See kujunes välja 1973. aastal, et üle saada eelmiste navigatsioonisüsteemide piirangutest. Ajalugu GPS-i välimus sarnaneb osaliselt maa-baasilise raadionavigatsiooni süsteemiga. Et saavutada täpseid nõudeid, kasutab GPS üldisi relatiivseid põhimõtteid, et parandada satelliitide aatomkella. Algne inspiratsioon GPS-i loomiseks tuli siis, kui Nõukogude Liit
GPS 1) GPS on satelliitnavigatsioon, mille lühend tuleneb inglisekeelsest sõnast, mis tähendab eesti keeles üleilmne asukoha määramise süsteem, mis on kosmosepõhine globaalne navigatsiooni satelliidi süsteem, mille omanik on Ameerika Ühendriikide valitsus. Süsteemi peab üleval Ühendriikide valitsus ja on vabalt kättesaadav kõigile, kellel on GPS vastuvõtja. GPS loodi ja realiseeriti USA Kaitseministeeriumi poolt ning originaalselt oli kasutuses kahekümne nelja satelliidiga, mis asusid 20 200 km kõrgusel. Seekujunes välja 1973. aastal. 2) AJALUGU GPS-i välimis sarnaneb osaliselt maa-baasilise raadionavigatsiooni süsteemiga, mis arendati välja 1940. aastate alguses. Täpsete nõuete saavutamiseks kasutab GPS üldisi relatiivseid põhimõtteid, mis aitab parandada satelliitide aatomkella. Algne inspiratsioon GPS- i loomiseks tuli siis, kui Nõukogude Liit saatis esimese inimese poolt valmistat
Tartu Tervishoiu Kõrgkool Erakorralise meditsiini tehniku õppekava PRIIT KIRSS GPS Referaat Juhendaja: Siim Nemvalts, Tartu Tervishoiu Kõrgkooli lektor Tartu 2014 1 SISUKORD MIS ON GPS?..................................................................................................................................3 SÜSTEEMI ARENG.......................................................................................................................3 MIS ON GPS? 2 Lühend GPS tuleneb inglisekeelsest terminist Global Positioning System - Ülemaailmne Asukohamääramise Süsteem, Globaalne Punkti Seire, kohamäärangusüsteem. Globaalne Positsioneerimise Süsteem võimaldab toimetada mingit objekti planeet Maa lähedasse etteantud koordinaatidega mistahes punkti. Juhtiv objekt saab GPS abil katkematult a
Tartu Tervishoiu Kõrgkool Erakorralise meditsiini tehniku õppekava SVETLANA KAVALEROVA GPS Referaat Juhendaja: Silver Konksi, lector Tartu Tervishoiu Kõrgkool Tartu 2012 MIS ON GPS? Lühend GPS tuleneb inglisekeelsest terminist Global Positioning System - Ülemaailmne Asukohamääramise Süsteem, Globaalne Punkti Seire, kohamäärangusüsteem. Globaalne Positsioneerimise Süsteem võimaldab toimetada mingit objekti planeet Maa lähedasse etteantud koordinaatidega mistahes punkti. Juhtiv objekt saab GPS abil katkematult andmeid enda asukoha ning liikumise suuna ja kiiruse kohta. Süsteemi töö põhineb elektromagnetlainete (sagedused 1,2 ja 1,5 GHz) püsiva kiirusega s
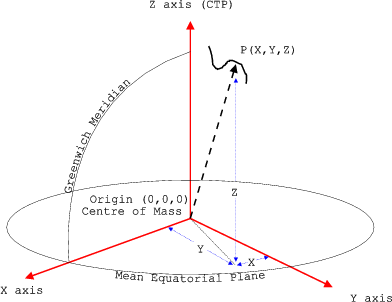
(Eesti Geoinformaatika Selts). Järgnevalt tuleb juttu GIS-i kasutusest navigatsiooniseadmetes, nende tööst ning mõningatest tarkvaraprogrammidest nagu ArcGIS ja ArcPad. Mis on GPS? GPS pole piisav termin, kuna Ameerika Ühendriikide GPS-süsteemile leidub sarnaseid alternatiive ka teistel riikidel. Peaks kasutama ehk sõna satelliitpositsioneerimine või asukohamääramine satelliitide abil. Rahvusvaheliselt on tulnud uus termin GNSS (Global Navigation Satellite System, ehk ülemaailmne navigatsioonisatelliitide süsteem) (Jürgenson 2006). Teame, et GPS-mõõt-mine põhineb spetsiaalsetel satelliitidel, mis tiirlevad ümber Maa u 20 000 km kõrgusel. Meetodiks on kosmosetriangulatsiooni lahendamine. Aja mõõtmisest saavad joonepikkused, joonepikkustest ruumilised ristkoordinaadid X, Y, Z ja neist arvutab GPS-seadme protsessor ka geodeetilised koordinaadid B ja L ning tasapinnalised
























Kõik kommentaarid