Kahekordse integraali mõiste ja geomeetriline tõlgendus - kõversilindri ruumala, tasandilise kujundi pindala. Kahekordse integraali omadused, arvutamine. 29. Muutuja vahetus kahekordses integraalis, üleminek polaarkoordinaatidele 30. Kolmekordse integraali mõiste, arvutamine. 31. Muutuja vahetus kolmekordses integraalis, üleminek silindrilistele ja sfäärilistele koordinaatidele. Kolmekordse integraali rakendused: keha ruumala ja massi valem. III osa Diferentsiaalvõrrandid (15 punkti) 32. Diferentsiaalvõrrandi mõiste, liigitus, järk. 33. . Diferentsiaalvõrrandi üldlahend, erilahend. Integraalkõver. Cauchy ülesanne. Lahendi olemasolu ja ühesuse teoreem 34. Esimest järku harilikud diferentsiaalvõrrandid. Eraldatud ja eralduvate muutujatega diferentsiaalvõrrandite mõisted, lahendamine. 35. Homogeense diferentsiaalvõrrandi üldkuju, lahendamine. 36. Murdlineaarset avaldist sisaldava
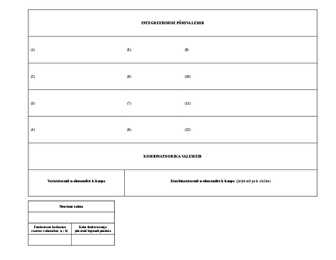
INTEGREERIMISE PÕHIVALEMID (1) (5) (9) (2) (6) (10) (3) (7) (11) (4) (8) (12) KOMBINATOORIKA VALEMEID Variatsioonid n-elemendist k-kaupa Kombinatsioonid n-elemendist k-kaupa (järjekord pole oluline) Newtoni valem Funktsiooni keskmine Kahe funktsiooniga väärtus vahemikus [a ; b] piiratud kujundi pindala Lineaarne 1. järku DV DIFERENTSIAALVÕRRANDID ...
loodusseadusi on võimalik eksperimentaalselt avastada, kui oskame looduselt õigesti küsida makrokehade liikumist seletavad seadused kehtivad ka üksikaatomite ja üksikmolekulide korral algtingimused ja liikumisseadused on teineteisest sõltumatud maailm on põhimõtteliselt tunnetatav. Selleks on vaja olendit, mida hakati nimetama Laplace'i deemoniks. Laplace'i deemon suudab koostada kõigi maailmas leiduvate kehade liikumise diferentsiaalvõrrandid ja need ka integreerida. Sellega oleksid maailma moodustavate kehade trajektoorid ja liikumisolekud määratud nii tulevikus kui minevikus mehaaniline liikumine keha asukoha muutumine teiste kehade suhtes Nähtus energia jäävuse seadus energia ei kao ega teki vaid muundub ühest liigist teise või kandub ühelt kehalt teisele Seadus kiirendus kiiruse muut ühes ajaühikus Suurus Galileo Galilei (15. veebruar 1564 Pisa 8. jaanuar 1642 Arcetri)
Matemaatiline modelleerimine inseneridele (4 EAP) TE.0933 [email protected] Õppeaines käsitletavad teemad on: 1. Mudelite liigid ja modelleerimise käsitlused. 2. Tutvumine programmipakettiga SCILAB. 3. Maatriksid ja lineaarvõrrandisüsteemid (rakendused). Võrrandid ja võrrandisüsteemid ning nende lahendamine. 4. Funktsioonide lähendamine. 5. Polünoomidega interpoleerimine. 6. Harilikud diferentsiaalvõrrandid, osatuletistega diferentsiaalvõrrandid, nende ligikaudse lahendamise meetodid. 7. Numbrilised meetodid. Simulatsioonid ja numbrilised eksperimendid. 8. Optimaalse juhtimise teooria elemendid. 9. Dünaamiliste protsesside modelleerimine. MUDEL on (tunnetatava) objekti analoog, mis tunnetusprotsessis seda objekti asendab. [J. Lotman. Kultuurisemiootika http://www.ut.ee/lotman/ee/teosed/kultuurisemiootika/kunstmod.htm]
1 ÜHE MUUTUJA FUNKTSIOON. TEMA MÄÄRAMISPIIRKOND DEFINITSIOON 1. Kui muutuja x igale väärtusele hulgast X on mingi eeskirja f abil vastavusse seatud lõplik reaalarv y, siis öeldakse, et hulgal X on määratud FUNKTSIOON ja seda tähistatakse y = f(x). DEFINITSIOON 2. Muutuja x väärtuste hulka, mille puhul f(x) väärtus on lõplik, nimetatakse funktsiooni y = f(x) MÄÄRAMISPIIRKONNAKS. X = { x R; f(x) väärtus on lõplik}. PÕHILISED ELEMENTAARFUNKTSIOONID: 1. Astmefunktsioonid: y = x , Q; 2. Eksponentfunktsioonid: y = ax, a > 0, a 1; 3. Logaritmfunktsioonid: y = loga x, a > 0, a 1; 4. Trigonomeetrilised funktsioonid: y = sin x, y = cos x, y = tan x, y = cot x; 5. Arkusfunktsioonid: y = arcsin x, y = arccos x, y = arctan x, y = arccot x. 2 LIITFUNKTSIOON DEFINITSIOON 1. Funktsiooni, mille argumendiks ei ole sõltumatu...
kõik on täielikult determineeritud *loodusseadusi on võimalik eksperimentaalselt avastada, kui oskame looduselt õigesti küsida *makrokehade liikumist seletavad seadused kehtivad ka üksikaatomite ja üksikmolekulide korral *algtingimused ja liikumisseadused on teineteisest sõltumatud *maailm on põhimõtteliselt tunnetatav. Selleks on vaja olendit, mida hakati nimetama Laplace'i deemoniks. Laplace'i deemon suudab koostada kõigi maailmas leiduvate kehade liikumise diferentsiaalvõrrandid ja need ka integreerida. Sellega oleksid maailma moodustavate kehade trajektoorid ja liikumisolekud määratud nii tulevikus kui minevikus. Nähtus: mehaaniline liikumine keha asukoha muutumine teiste kehade suhtes Seadus: energia jäävuse seadus energia ei kao ega teki vaid muundub ühest liigist teise või kandub ühelt kehalt teisele Suurus: kiirendus kiiruse muut ühes ajaühikus Termodünaamika ja molekulaarkineetlise teoori põhjustatud muutused maailmapildis
........................................................................ 5 8.Eksaktne diferentsiaalvõrrand..................................................................................................6 9.Eralduvate muutujatega diferentsiaalvõrrand.......................................................................... 7 10.Lineaarne diferentsiaalvõrrand...............................................................................................7 11.Lineaarsed konstantsete kordajatega diferentsiaalvõrrandid................................................ 7 1.Kordse integraali mõiste. Kahekordne intgeraal. Kahekordse integraali omadused. Kui eksisteerib , mis ei sõltu osapiirkondadeks Dj jaotamise viisist ega punktide Pj Dj valikust, siis seda piirväärtust nimetatakse funktsiooni f(x,y) kahekordseks integraaliks üle piirkonna D ja tähistatakse Kahekordse integraali omadusi 1. Kui funktsioon f(x,y) on pidev piirkonnas D, siis ta on ka integreeruv piirkonnas D 2
-Maailma saab kirjeldada matemaatiliselt võrranditega, mis väljendavad põhjuse ja tagajärje vahelisi seoseid. -Maailmas pole kohta juhusel, kõik on täielikult determineeritud. -Loodusseadusi on võimalik eksperimentaalselt avastada, kui oskame looduselt õigesti küsida. -Makrokehade liikumist seletavad seadused kehtivad ka üksikaatomite ja molekulide korral. -Maailm on pmst tunnetatav, selleks on vaja olendit, mida nim LAPLACE´i deemoniks. See suudab koostada kõikide kehade liikumise diferentsiaalvõrrandid ja need ka integreerida. Nii on maailma moodustavate kehade trajektoorid ja liikumisolekud määratud minevikus ja olevikus. Nähtused:1)mehhaaniline liikumine-keha asukoha muutumine teiste kehade suhtes. 2)hõõrdumine- vastastikmõju, mis esineb kehade kokkupuutel. Suurused:1)impulss-keha massi ja kiiruse korrutis.2)jõud-iseloomustab vastastikmõju tugevust. Seadused:1)Energia jäävuse seadus-engeria ei teki ega kao vaid muundub ühest liigist teise või kandub ühelt kehalt teisele
y 1+ x 2 y ln y=x → y =e x Kirjut . kujul f ( x , y )=f 1, ( ) x Diferentsiaalvõrrandid: DV järk on DV-s esinevate tuletiste kõrgeim järk. y dy du Harilikud DV-d: otsitav funktsioon y on ühe muutuja Asendus u= ehk y =ux → =u+ ∙ x 1 1 x dx dx =x−α funktsioon. α x α Osatuletisega DV-d: √x=x otsitav
31. Võrrandit, mis sisaldab sõltumatut muutujat x, tundmatut funktsiooni y=f(x) ja selle tuletisi y´,y´´ (n) … y nimetatakse diferentsiaalvõrrandiks(DV-ks) a. Diferentsiaalvõrrandi järk on diferentsiaalvõrrandis esinevate tuletiste kõrgeim järk.( y ´=3x-5) b. DV-i lahendiks nimetatakse iga funktsiooni y= f(x), mille asetamisel võrrandisse saama samasuguse c. Näited: d. e. f. Liigitus: 1. Harilikud diferentsiaalvõrrandid- Lineaarsed või mittelineaarsed- Homogeensed või mittehomogeensed 2. Osatuletistega diferentsiaalvõrrandid- Lineaarsed või mittelineaarsed- Homogeensed või mittehomogeensed 32. DV-t kujul M(x)dx+N(y)dy =0 nimetatakse eraldatud muutujatega võrrandiks dy dy 33. dx =ky . Korrutan dx ja jagan y läbi saan y =kdx . Võtan integraali. Vastus: lny= kx+C
Mõlemad arenevad käsikäes ja kontrollivad vastastikku teineteise tulemuste pädevust. Teooria ennustab ka uusi nähtusi. Füüsikateooria stimuleerib matemaatika arengut, püstitades uusi ülesandeid, millele otsitakse uudseid lahendusviise. Niisiis on füüsika täppisteadusena lähisuhteis matemaatikaga. Eraldi distsipliinina käsitatakse matemaatilist füüsikat, mille peamiseks aparaadiks on osatuletistega kõrgemat järku diferentsiaalvõrrandid. Olulist rakendust leiab füüsikas rühmateooria ning maatriksarvutus. Suuresti on kannustanud füüsika arengut elektronarvutite tulek, võimaldades: kompuuterkatseid, protsesside modelleerimist ning simuleerimist (pahamaiguline sõna, kuid paremat esialgu pole). (4) 4 2.FÜÜSIKA OLULISUS Füüsika on tehnika, inseneeria alus (rakendusfüüsika). Teiselt poolt annab tehnika füüsikale järjest uusi uurimisriistu
Teatud kindlal ajahetkel võib kiirust igas punktis kujutada vastava kiirusvektorina. Sellist vektorite süsteemi nimetatakse kiiruste väljaks. Voolujooneks nimetatakse sellist kõverat kiirusteväljas, kus kiirusvektor on igas punktis kõverale puutujaks. 36. Potentsiaalne liikumine Potentsiaalne liikumine on selline liikumine, mille puhul vedeliku kiirused vastavad tingimustele ; . 37. Vedeliku liikumise diferentsiaalvõrrandid ja Euleri võrrand. Euleri võrrandid 38. Bernoulli võrrand voolujoonele hõõrdevaba vedeliku statsionaarsel liikumisel? Pidevuse võrrand diferentsiaalvõrrandi kujul. 5 39. Reaalvedeliku voolamise põhivõrrand Navier-Stokes'i võrrand 40. Keerisvoolamise põhimõisted
. . . . . . . . . . . . . . . . 73 7.7 Ositi integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 7.8 Ratsionaalfunktsioonide integreerimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 iv 0.0. Sisukord 8 Diferentsiaalvõrrandid 77 8.1 Sissejuhatus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 8.2 Diferentsiaalvõrranditest üldiselt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 8.3 Esimest järku diferentsiaalvõrrandid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 8.4 Eralduvate muutujatega diferentsiaalvõrrandid . . . . . . .
Asendades selle põhivõrrandite süsteemi saame m x = -bv cos m y = -m g - bvsin b x + m v cos = 0 kust b (4.39) y + v sin = - g m J. Kirs Loenguid ja harjutusi dünaamikast 30 Diferentsiaalvõrrandid on küll leitud, kuid sellisel kujul neid lahendada ei saa. Asi on nimelt selles, et meil on siin kahe võrrandi jaoks tervelt 4 ajast sõltuvat funktsiooni: x (t ) , y (t ) , v (t ) ja (t ) . Kaks funktsiooni on siin üleliigsed, neist tuleb teisenduste abil lahti saada. Selleks vaatleme kiirusvektorit v vaadeldavas trajektoori punktis (joonis 4.6). v
arg z = arctan - kui x <0 ja y <0 x Tehted: korrutis z1 z 2 = z1 z 2 e i ( 1 + 2 ) , z1 z1 i ( 1 -2 ) jagatis = e . z2 z2 Harilikud diferentsiaalvõrrandid Esimest järku diferentsiaalvõrrand dy = f ( x, y ) dx ( x) on eralduvate muutujatega, kui f ( x, y ) = . Siis ( x ) dx =( y ) dy ning ( y) üldlahend on määratud avaldisega ( x ) dx = ( y ) dy +C . 4
y’+p(x)y=q(x) nimetame lineaarseks mittehomogeenseks diferentsiaalvõrrandiks. Kui q(x)≡0, siis nimetame vastavat võrrandit lineaarseks homogeenseks diferentsiaalvõrrandiks.) kus Yk on vastava homogeense võrrandi üldlahend (2) ja Yo on võrrandi (4) mingi erilahend. Erilahendi leidmiseks võib kasutada konstantide varieerimise meetodit või määramata kordajate meetodit. 11.Lineaarsed konstantsete kordajatega diferentsiaalvõrrandid Lineaarne konstantsete kordajatega n-järku diferentsiaalvõrrand on esitatav kuju y(n)+p1y(n-1)+…+pn-1y’+pny=f(x). Vastav homogeenne DV on kujul y(n)+p1y(n-1)+…+pn-1y’+pny=0. Mittehomogeense DV üldlahend y on esitatav homogeense DC üldlahendi Yh ja mittehomogeense DV mingi erilahendi Y* summana y=yh+y*. Lineaarne konstantsete kordajatega n-järku homogeense DV y(n)+ p1y(n-1)+ … + pn-1y’+ pny = 0.
(вписать с листа) 3. Fluidumi staatika. Hüdrostaatika põhivõrrand ja selle rakendamine Eeldused valemi tuletamisel: 1. staatiline fluidum 2. pinnajõududest mõjub ainult rõhujõud 3. massijõududest on ainus mahule dV mõjuv gravitatsioonijõud gdxdydz, mis on suunatud alla (z-telg on vertikaalne) Saadud võrrandid on Euleri hüdrostaatika diferentsiaalvõrrandid (1755.a).Võrrandisüsteemi (2.8) kaks esimest võrrandit väljendavad rõhu sõltumatust koordinaatidest x ja y. Horisontaalsed tasapinnad on seega samarõhupinnad, mille kõigis punktides valitseb ühesugune rõhk. 4. Fluidumi dünaamika. Mehaanilise energia bilanss. Bernoulli võrrand, Bernoulli võrrandi erinevad kujud ja rakendamine. Bernoulli võrrandi rakendamine voolukiiruse ja vooluhulga mõõtmisel. Bernoulli võrrandi ra kendamine voolamisel avadest.
x/gx=y/gy=. c) n-muutuja ja mitme kitsendusega ül. z=(x1x2...xn), g(x1x2...xn)=c, z=(x1x2...xn) +[c-g(x1x2...xn)], z=c-g(x1;x2...xn)=0, z1=1-g1=0, zn=n-gn=0 d) Teist järku tingimused: vaba opt ül: d2z=fxxdx2+2fxydxdy+fyydy2, kitsendusega: d2z=fxxdx2+2fxydxdy+fyydy+fyd2y, Lagrange'i: d2z=zxxDx2+zxydxdy+zyxdydx+zyydy2 TT kitsendusi arvastades: z max, kui d2z<0, dg=0, z min, kui d2z>0, dg=0, TT hessi det kaudu: q=au2+2huv+bv2,kui u+v=0 18. Esimest järku lineaarsed diferentsiaalvõrrandid, mittelineaarsed diferentsiaalvõrrandid, faasidiagramm. üldkuju dy/dt+uy=w *konstantse koraja ja vabaliikmega LDV-d Dy/dt+u(t)y=w(t) u(t)=k1 , w(t)=k2 Homogeenne juht: u(t)= k1, w(t)=0 , dy/dt+ay=0 , y(t)Ae -at , a=0 korral y(t)=yc+yp=A+bt Mittehom.juht: dy/dt+ay=b , yc=Ae-at , y(t)=yc+yp , yp=b/a *Muutuva koefitsendi ja vabaliikmega LDV: dy/dt+u(t)y=w(t) Homogeenne juht: w(t)=0 , dy/dt+u(t)y=0 , y=Ae -u(t)dt Mittehom: y(t)= e-u(t)dt (A+weu(t)dt dt) *Mittelineraarsed DV f(y;t)dy + g(y;t)dt=0
Matemaatilise mudeli muutujad (ajast sõltuvad liikmed) kirjeldavad süsteemis toimuvaid dünaamilisi protsesse ja on üldiselt mõõdetavad. Lisaks sisaldavad võrrandid suurusi (koefitsiente), mida nim. süsteemi (või selle elementide) parameetriteks ja mis võivad olla konstantsed, sõltuda ajast või ka mudeli muutujatest. Süsteemi matemaatilise mudeli võrrandite tüüpilisi liike: 1.Algebralised, mis seovad muutujate iga ajahetke väärtusi omavahel. 2. Diferentsiaalvõrrandid, mis seovad muutujaid kirjeldavaid ajafunktsioone. 3.Lineaarsed võrrandid, mis võivad sisaldada liikmetena vaid muutujaid esimeses astmes, muutujate korrutisi konstantsete või ajast sõltuvate parameetritega ning liikmete summasid-vahesid. 4. Mittelineaarsed kõik, mis ei ole lineaarsed. Abstraktne süsteem on konkreetsete süsteemimudelite ekvivalentsiklassi ühtne esindaja, milles on säilitatud matemaatilised funktsionaalsed seosed ja võrrandid, kuid on kõrvaldatud
27, A.Lahe),lisada muutujate tähendus, lk 44 Varda elementaarse osa tasakaalutingimustest saadakse varda sisejõudude ja koormuse vahel diferentsiaalseosed dQZ/dx= - q(x) Qz- põikjõud dx- jaotatud koormuse mõjuala pikkus. q- jaotatud koormus 7. Etteantud on valem. Selgitada lühidalt, mida selle abil arvutatakse ja muutujate tähendust selles valemis (Ma, Mx,Qa,Qx,F1,qz,H), lk 57 Ülekandemaatriks paindel Koostatakse tala tasakaalu diferentsiaalvõrrandid paindel (toereaktsioonide leidmine). Algparameetrite meetodi puhul arvutame tala sisejõude ülekandevõrranditega. Kirjutame need võrrandid maatrikskujule, kus toome eraldi välja tala alguses olevad reaktsioonid(jõud), Ma ja Mx- koondatud paindemoment punkti a suhtes/x telje suhtes. Qa ja Qx põikjõud punkti a suhtes/x telje suhtes või lõikes x. F1 ja F2 - koondatud jõud. qz - ühtlaselt jaotatud koormus. H - Heaviside'i funktsioon 8. Tala mõjujooned. Mõjujoone mõiste
Tema peateos on "Analüütiline mehaanika" (1788). J. Kirs Loenguid ja harjutusi dünaamikast 4 Lagrange'i poolt rajatud uue suuna, mida tänapäeval tuntakse analüütilise mehaanika nime all, üheks väljpaistvamaks edasiarendajaks oli inglise mehaanik, matemaatik ja astronoom William Rowan Hamilton (1805-1865). Tal õnnestus tuletada üldine variatsiooniprintsiip (nn vähima mõju printsiip), millest lähtudes võib saada süsteemi liikumise diferentsiaalvõrrandid. Muutuva massiga kehade mehaanika rajas Peterburgi Polütehnilise Instituudi professor Ivan Mestserski (1859-1935). Oma kuulsa võrrandi esitas ta magistri- dissertatsioonis "Muutuva massiga punkti dünaamika" 1897. aastal. Seda arendas ta edasi ja üldistas 1904. aastal. Raketiteooria looja on K. Tsiolkovski (1857-1935). §2. Dünaamika aksioomid Dünaamika aksioome on neli. Kolmeks esimeseks on Newtoni kolm seadust.
DV II teooriatöö kordamisküsimused 1. Kõrgemat järku harilik DV. Lahendi olemasolu, ühesuse tingimused, üldlahend, erilahend. V: Kõrgemat järku harilikud diferentsiaalvõrrandid: Üldkuju: F(x, y, y', y'', ..., y(n)) = 0, kus x on sõltumatu muutuja, y = y(x) on otsitav funktsioon ja y', ..., y (n) on otsitava funktsiooni tuletised. Normaalkuju: y(n) = f(x, y, y', ..., y(n-1)) (1) Eksaktne lahend: x0, y0, y01, ..., y0n-1, Algtingimused: nii mitu konstanti kui suur on DV järku konstant.
Hz–20 000 Hz B) Heli intensiivsuse logaritmiline skaala C) Heli valjuse psühhofüüsikaline logaritmiline skaala, samavaljuskõverad D) Doppleri effekt Doppleri efekt seisneb heli kõrguse muutumises kui heliallikas vaatleja (lainete vastuvõtja) suhtes läheneb või kaugeneb. Hüdromehaanika alused a. Vedelike peamised füüsikalised omadused b. Viskoossus c. Vedelikus mõjuvad jõud d. Hüdrostaatiline rõhk, hüdrostaatilise rõhu omadused e. Vedeliku tasakaalu diferentsiaalvõrrandid f. Hüdrostaatika põhivõrrand, põhivõrrandi rakendusvorm g. Pascali seadus h. Archimedese seadus i. Bernoulli võrrand ideaalvedeliku muutumatu voolu elementaarjoa kohta j. Bernoulli võrrand ideaalvedeliku muutumatu voolu kohta k. Bernoulli võrrand reaalvedeliku statsionaarse voolu kohta A) Vedelike peamised füüsikalised omadused Tihedus (kg/m3 ) on vedeliku ruumalaühiku mass: � = �/ � . Erikaal (N/m3 ) on vedeliku ruumalaühiku kaal: � = �� /V
Matemaatilise mudeli muutujad (ajast sõltuvad liikmed) kirjeldavad süsteemis toimuvaid dünaamilisi protsesse ja on üldiselt mõõdetavad. Lisaks sisaldavad võrrandid suurusi (koefitsente), mida nim. süsteemi (või selle elementide) parameetriteks ja mis võivad olla konstantsed, sõltuda ajast või ka mudeli muutujatest. Süsteemi matemaatilise mudeli võrrandite tüüpilisi liike: 1.Algebralised, mis seovad muutujate iga ajahetke väärtusi omavahel. 2. Diferentsiaalvõrrandid, mis seovad muutujaid kirjeldavaid ajafunktsioone. 3.Lineaarsed võrrandid, mis võivad sisaldada liikmetena vaid muutujaid esimeses astmes, muutujate korrutisi konstantsete või ajast sõltuvate parameetritega ning liikmete summasid-vahesid. 4. Mittelineaarsed kõik, mis ei ole lineaarsed. Abstraktne süsteem on konkreetsete süsteemimudelite ekvivalentsiklassi ühtne esindaja, milles on säilitatud matemaatilised
Erilahendi sin 𝜓 ≠ 0. y1 leidmiseks võib kasutada konstantide varieerimise meetodit või määramata kordajate meetodit. 14. Lineaarsed konstantsete kordajatega diferentsiaalvõrrandid Lineaarne konstantsete kordajatega n-järku pn 1 x y2 pn x y1 pn x y2 0
F=*((m1*m2)/r2), - gravitatsioonikonstant, r - kehade vaheline kaugus d) erirelatiivsus m=m0/1+v2/c2 , v- keha kiirus, c valguse kiirus e) kiirusest sõltuv mass ma= F, m=m(t), a=r``(t), (d/dt)mv 30. Dünaamika põhiülesanded. Ülesanded: a) on antud masspunkti liikumine (s.t. tema liikumisseadus) ja tuleb leida jõud, mille mõjul liikumine toimub. b) on antud masspunktile mõjuv jõud, leida tuleb selle masspunkti liikumise seadus. 31. Punkti liikumise diferentsiaalvõrrandid (vektorkujul, koordinaatkujul). *Üldjuhul: ~F= ~F(~r, d~r/dt, t) *Vektorkujul: m(d2~r/dt2)= ~F(~r, d~r/dt, t) , võib vaadelda kui diferentsiaalvõrrandit, milles kohavektor ~r on funktsiooniks ja aeg t argumendiks. *Koordinaatkujul: a) ristkoordinaadid: mx``= Fx; my``= Fy; mz``=Fz b) polaarkoordinaadid: m(r´´-r*´2)=Fr, md/rdt(r2*`2)=F 32. Masspunktide süsteem. Masspunktide süsteemi mass, masspunktide süsteemi massikese. Süsteemi välis- ja sisejõud. Sisejõudude omadused.
Sageli diskreetsed ajahetked erinevad võrdse ajaintervalli võrra, mida tavaliselt nimetatakse taktiks (taktikestuseks) ning ajahetki taktihetkedeks. 2.1 Dünaamiliste süsteemide modelleerimine. modelleerimisel tehakse kindlaks vajalik sisendite arv ning sisendite seos väljunditega. üsteemi matemaatilise mudeli võrrandite tüüpilisi liike: 1.Algebralised, mis seovad muutujate iga ajahetke väärtusi omavahel. 2. Diferentsiaalvõrrandid, mis seovad muutujaid kirjeldavaid ajafunktsioone. 3.Lineaarsed võrrandid, mis võivad sisaldada liikmetena vaid muutujaid esimeses astmes, muutujate korrutisi konstantsete või ajast sõltuvate parameetritega ning liikmete summasid-vahesid. 4. Mittelineaarsed kõik, mis ei ole lineaarsed. Abstraktne süsteem on konkreetsete süsteemimudelite ekvivalentsiklassi ühtne esindaja, milles on säilitatud matemaatilised funktsionaalsed seosed ja võrrandid, kuid on
.......................... 26 42. Kahe muutuja funktsioon, tema määramispiirkond ja muutumispiirkond. Tuua näiteid kahemuutuja funktsioonide kohta. .................................................................................................26 43. Kahe muutuja funktsiooni pidevus ja katkevus. ......................................................................27 44. Mitme muutuja funktsiooni täismuut ja täisdiferentsiaal. ....................................................... 27 45. Diferentsiaalvõrrandid. Diferentsiaalvõrrandi lahend, üldlahend, erilahend, singulaarne lahend. ............................................................................................................................................28 46. Eralduvate muutujatega diferentsiaalvõrrand. Kirjeldada eralduvate muutujatega .................29 diferentsiaalvõrrandi lahendamist. .................................................................................................29 47
jagatud kahte ossa. Neid osi peab hoidma koos mingi jõud F p, see on hüdrostaatiline rõhu- ehk survejõud. Selle jõu intensiivsust tasapinna A suvalises punktis nimetatakse hüdrostaatiliseks rõhuks ehk surveks.) Hüdrostaatilisel rõhul on kaks põhiomadust: Hüdrostaatiline rõhk mõjub risti pinnaga. Teise suunalisi jõude ei saa olla, muidu hakkab vedelik liikuma; vedeliku mingis punktis mõjuv hüdrostaatiline rõhk on kõikides suundades ühesuurune. 1.5 Vedeliku tasakaalu diferentsiaalvõrrandid Vaatleme tasakaalus olevat vedelikku. Vedelikule mõjuvad välisjõud dx, dy, dz; P=f(x,y,z). D'Alembert'i printsiibi kohaselt peab sellele ristahukale mõjuvate, mis tahes suunaliste jõudude summa võrduma nulliga. Rõhku tasakaalus olevas võrrandis kirjeldab avaldis: Selle võrrandi integreerimiseks on vaja teada süsteemis mõjuva kiirenduse a komponente. 1.6 Samarõhupinna võrrand. Hüdrostaatika põhivõrrand
! ! Mängu N-tuumaks nim sellist tulemusvektorit x*, mille korral kõikvõimalike koalitsioonide järgi leitud maksimaalne ekstsess on minimaalne tulemusvektorite x järgi, mis on kollektiivselt ratsionaalsed. LP ülesande koostamisel vaadeldakse kõiki koalitsioone, mis on võimelised töö ära tegema. Tulemus on 1, ning igale koalitsioonile liidetakse muutuja y. Samal ajal yàmin. y on võrdne -ga, ehk siis kitsendustel on kõikide koalitsioonide võrratused. 32. Diferentsiaalvõrrandid (põhimõisted, Cauchy'i ülesanne) Esimest järku difvõrrandil on kuju F(x,y,y')=0. Kui seda võrrandit saab lahendada võib teda esitada kujul y'=f(x,y). Esimest järku dif.võrrandi üldlahendiks nim funktsiooni y=(x,C), mis sõltub konstandist C ja rahuldab tingimusi a)rahuldab dif.võrrandit C mistahes konkreetsel väärtusel ; b) olenemata algtingimusest võib leida C väärtuse C=C0 , et funktsioon y= (x,C0) rahuldab antud algtingimust. Eeldatakse , et väärtused x0 ja y0
kusjuures on valitud niiviisi, et lõpmata integraal koondub Alati ei pruugi olla ühene, kuigi suuremalt jaolt on 1 Näiteks: kujutisele vastab originaal f1() = ek s -k =2 kohal on katkevuskoht Pöördteisendus on lineaarne. L-1[AF(s)+BG(s)]=Af()+Bg() = AL-1[F(s)]+BL-1[G(s)] Kujutise järgi originaali leidmine on keeruline, kuid selleks on tabelid. Reguleerimissüsteemide uurimine lihtsustub tunduvalt, kui esitame diferentsiaalvõrrandid nende nn. operaatorkujutistena ja võtame appi ülekandefunktsioonid. Nimetatud võte põhineb Laplace'e teisendustel. Operaatormeetodi kasutamisel asendatakse diferentsiaalvõrrandid lahendamisel suhteliselt lihtsate algebraliste võrranditega. See võimaldab lahendusi leida ka diferentsiaalvõrrandite integreerimise üksikasju tundmata. Diferentsiaalvõrrandite üleviimiseks nende kujutistele tuleb diferentsiaalvõrrandi kõigi tuletisoperatsioonide tähised asendada nn
koordinaatide pikkuste- ja laiuste vahed, saame leida sihtpunkti koordinaadid: Ls2=Ls1+LsV ja Ps2=Ps1+PsV, kus LsV on arvutatav kursi ja läbitud tee järgi. Vaatleme kolmnurka abc, milles: ab=ds , so. laeva poolt läbitud tee punktist a punkti b miilides ac=dw , so. meridiaanidevaheline kaugus mööda paralleeli miilides bc=d , so. laiuste vahe miilides Kolmnurka abc võib lugeda tasapinnaliseks ja sealt saame järgmised diferentsiaalvõrrandid: d dw d sin 90 K ; cos 90 K ; tan 90 K ds ds dw 2 d s cos K ds d ds cos K LsV s cos K 1 0 w s dw sin K ds dw ds sin K
identification. Eelnevas võib täheldada teatud sarnasust klassikalise modelleerimisega. Teadmuspõhine meetod on mõnes mõttes analoogiline esimese printsiibi modelleerimisele ning hägus identifitseerimine kuulub ühte gruppi süsteemide identifitseerimiseks kasutatavate statistiliste meetoditega. Klassikalises modelleerimises on võrdlemisi tihti kasutusel kombineeritud lähenemine, kus füüsikaseaduste baasil konstrueeritakse üldised diferentsiaalvõrrandid, mida loodetakse süsteemi käitumist kajastavat ning seejärel viiakse läbi eksperimente määramaks teatud süsteemi parameetrid või funktsioonid. Sarnast lähenemist on kasutatud ka hägusate süsteemide konstrueerimisel. Hägusate süsteemide konstrueerimist võib käsitleda kui 6-st sammulise eeskirja järgi toimuvat protseduuri [6]. i. Sisend- ja väljundmuutujate valik; ii. Hägusa süsteemi järeldusalgoritmi parameetrite valik; iii
Olgu funktsioonid p(x) ja q(x) määratud vahemikus (a,b), siis diferentsiaalvõrrandit y' + p(x)y = q(x)yn nimetame Bernoulli DV- ( )) + ( 2 ) / = (xi ()) xi () + (()) lim 0 (( )/ )+ lim 0 (( 2 ) / ) = (()) ks. Asendusega z = y-(n-1) saame lineaarse DV. xi (). Lineaarsed konstantsete kordajatega diferentsiaalvõrrandid. Olgu funktsioon q(x) määratud vahemikus (a,b) ning p = (p0,p1,...,pn) c Rn+1, siis diferentsiaalvõrrandit pny(n) + ... + p1y' + ... p0y = Tuletada suunatuletise valem funktsiooni osatuletiste kaudu. q(x) nimetame n-järku lineaarseks konstantsete kordajatega mittehomogeenseks DV-ks. Kui q(x) = 0, siis nimetame vastavat Definitsioon. Funktsioon u = f(x,y,z) suunatuletiseks punktis P(x,y,z) vektor l = (,,) suunas nimetatakse suurust lim
diferentsiaalvõrrandid algebralisteks võrranditeks. See meetod toimib ainult probleemide puhul, mille määramispiirkonnaks S nimetatakse selle rea summaks. Kui ei eksisteeri lõplikku piirväärtust lim 𝑆𝑛 siis nimetatakse seda rida hajuvaks. Näide 1
Algolekud – nullised ja mittenullised. Avage nende sisu. Millistel tingimustel ja eeldustel on pidevaja süsteem esitatav ekvivalentse diskreetaja süsteemina? Avage probleemi olemus ja tähtsus süsteemiteooria seisukohalt. Dünaamiliste süsteemide modelleerimine: Modelleerimisel tehakse kindlaks vajalik sisendite arv ning sisendite seos väljunditega. Süsteemi matemaatilise mudeli liigid: 1.Algebralised, seovad omavahel muutujate iga ajahetke väärtusi. 2. Diferentsiaalvõrrandid, seovad muutujaid kirjeldavaid ajafunktsioone. 3. Lineaarsed võrrandid, võivad sisaldada liikmetena vaid muutujaid esimeses astmes, muutujate korrutisi konstantsete või ajast sõltuvate parameetritega ning liikmete summat ja vahet. 4. Mittelineaarsed ehk kõik mis ei ole lineaarsed. 5. Abstraktne süsteem on konkreetsete süsteemimudelite ekvivalentsiklassi ühtne esindaja, milles on säilitatud matemaatilised funktsionaalsed seosed ja võrrandid, kuid on kõrvaldatud muutujate ja
ristsuunalisteks komponentideks. Võimalik on ka vastupidine teisendus. Tänu teisendustele saab suvalise faaside arvuga pöörleva magnetväljaga elektrimasinaid ning nendes toimuvaid füüsikalisi protsesse uurida ekvivalentse kahefaasilise elektrimasina mudeli abil. Asünkroonmootori dünaamikamudeli koostamist alustatakse tema ühefaasilisest ase- skeemist, mille põhjal kirjutatakse välja staatori- ja rootoriahela emj-de hetkväärtuste diferentsiaalvõrrandid. Nendele lisanduvad veel elektriajami liikumise üldvõrrand (samuti diferentsiaalvõrrand!) ja võrrand d/ dt = Seega koosneb lähtevõrrandisüsteem neljast diferentsiaalvõrrandist. Selle võrrandi- süsteemi lahendamist raskendab asjaolu, et muutujateks pole skalaarsuurused, vaid staatori- ja rootorivoolu vektorid, milliseid tuleb vaadelda kompleksmuutujatena pöörlevas koordinaadistikus
Teisalt annab see seos teatava mõttelise aluse üsna suurele osale looduse kirjel- damisest: selle jaoks, et kirjeldada mingi suuruse kogumuutu ehk integraali ajas, piisab sellest, kui kirjeldame tema hetkelist muutumise kiirust ehk tuletist. Selle lihtsa mõtte rakenduseks on diferentsiaalvõrrandid, mis panevad aluse suurele osale klassikalisest füüsikast. Neil me siiski pikemalt ei peatu. 352 Algfunktsioon ja määramata integraal integraal ja tuletis Meenutame, et kui meile on antud piisavalt sile funktsioon, millele saame igas punktis tuletise leida, võime tuletisest mõelda kui teisendusest, mis seab ühe