OLULISEMATE ANDURITE TÖÖPÕHIMÕTE Mootorielektroonika seadmetest moodustavad
andurid ühe suurema osa. Järgnevalt
ongi toodud olulisemate andurite tööpõhimõtete kirjeldused.
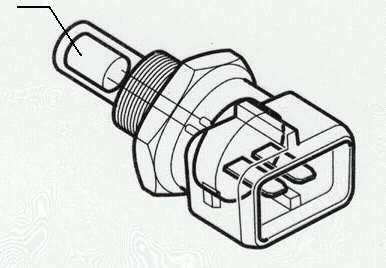
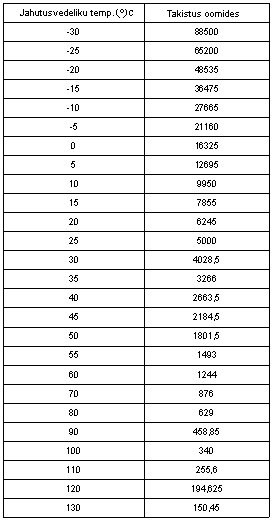
Temperatuuriandurid Temperatuuriandureid kohtab mootori
jahutusvedeliku temperatuurianduritena,
mootoriõli temperatuurianduritena, silindritele antava õhu temperatuurianduritena jne.
Reeglina on need termistortüüpi andurid, mil e põhiosaks on
pooljuht , mida kutsutakse
termistoriks. Sel e pooljuhi omaduseks on temperatuuri tõustes vähendada oma
elektrilist takistust.
Termistor 100000
90000
80000
70000 s
m h 60000
o 50000 Juuresoleval näitel on toodud
ce enBOSCH MED 17.4 temperatuuri-
40000 ésistananduri andmed
R30000 20000
10000
0
-30
-10
10
30
50
70
90
110
130
Température d'eau en °C Pöörlemissageduste andurid Pöörlemissageduste andurite al mõistetakse põhiliselt
vänt - ja nukkvõl i
pöörlemissageduste
andureid . Informeerib mootori juhtarvutit väntvõl i või nukkvõl i
pöörlemissagedusest. Need andurid võivad olla:
• Indukti vandurid
• Hal ´i andurid
• Magnet-takistuslikud andurid
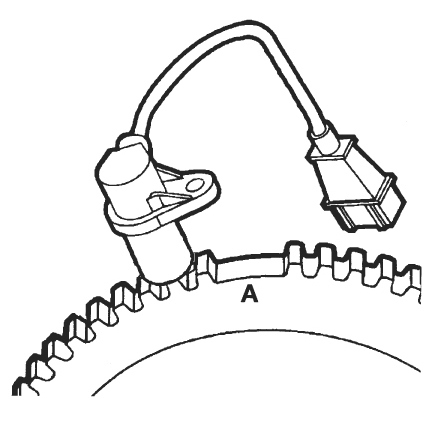
Indukti vandurid on kõige rohkem levinenud.
Näiteks väntvõl i pöörlemissageduse
andur kinnitatakse
tavaliselt hooratta karteri külge, kuid signaali tekitav
hammasvöö on hooratta küljes. Hammasvööl on üks
hammas vahelt ära jäetud, et arvuti saaks täpselt määrata
väntvõl i asendit (esimese silindri kolvi
ülemist surnud
seisu).
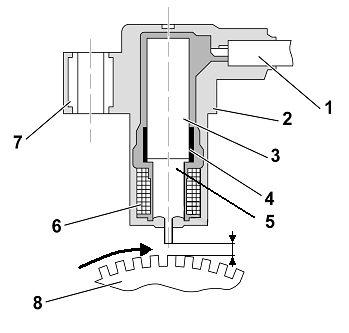
Need on kontaktivabad andurid, kus tänu magnetvälja
tugevuse vaheldumisele indutseeritakse anduri mähises
(6) vahelduv pinge. Püsimagneti (3)
magnetväli muutub
tugevamaks siis, kui anduri südamiku (5) alt li gub läbi
andurketta (8) hammas ja magnetväli nõrgeneb si s, kui
südamiku al a jõuab hambavahe. Ind
utseeritud pinge
vaheldumise sagedus sõltub ham
maste li kumise
ki rusest, ehk
teisisõnu – hammasketta
pöörlemissagedu-
sest. Andurketas (8) pöörleb koos väntvõ
l iga.
1 – ühendusjuhe
arvutil e
2 – anduri kere
3 -
püsimagnet 1mm 4 - puks
5 – anduri
südamik , mil
e alumine
ots moodustab mag
neti ühe pooluse
6 -
mähis 7 - kinnitusava
8 - andurketas
Indukti vanduri tööpõhimõte
Magnetvälja tugevuse muutumine indutseerib anduri mähises pinge, mil e tugevus
sõltub magnetvälja tugevusest ja tema muutumise ki rusest. Kuna magnetvälja
muutumise sagedus sõltub andurketta pöörlemise sagedusest, si s ka mähises
indutseeritava pinge muutmise sagedus sõltub andurketta pöörlemissagedusest. Anduri
ja andurketta hammaste vaheline
pilu on täpselt määratletud ja mõnedel (vanematel) mudelitel
on see reguleeritav.
Pärast andurite signaalide läbitöötamist on arvuti võimeline igal hetkel määrama
väntvõlli pöörlemissageduse
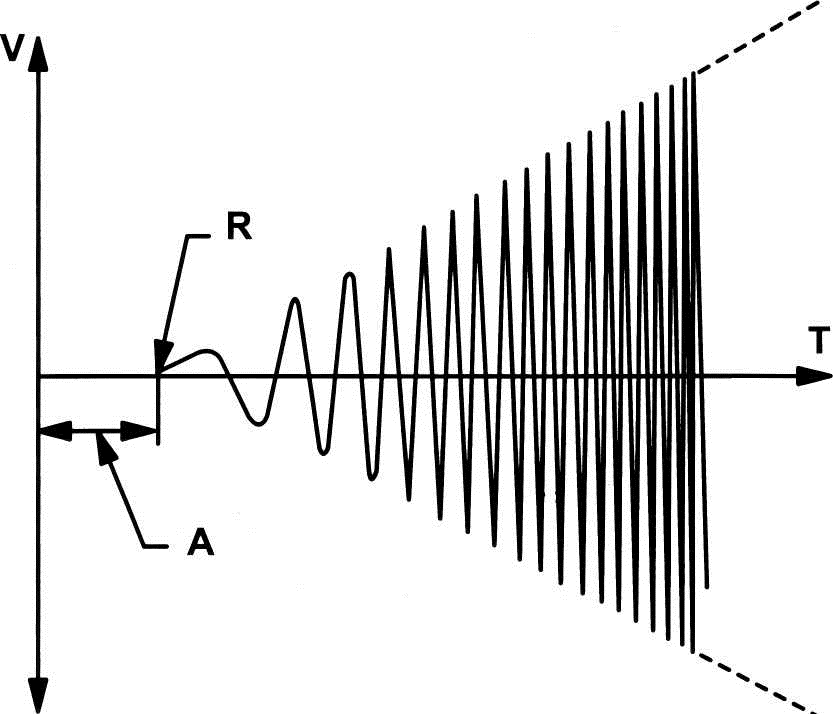
Väntvõl i pöörlemise alguse
signaal (R) on väga nõrk (mõni mV) ja seetõttu tugevalt
mõjutatav mitmesugustest häiretest.
Väntvõl i pöörlemissageduse tõustes tõuseb ka anduri mähise pinge, mis väntvõl i
suurematel pöörlemissagedustel võib
tõusta mitmesaja voldini. See nõuab
arvutile tervet rida kaitsemeetmeid.
V = Anduri mähises indutseeritav pinge
Т = Aeg
R = Väntvõl i pöörlemise algus
А = Väntvõll ei pöörle
AKTIIVSED ANDURID
Andurit nimetatakse akti vseks, kui tema tööks on vajalik väline
toitepinge , mil e
puudumisel andur elektrilisi impulsse ei genereeri.
Tänu oma väikestele mõõtudele ja väikesele massile saab akti vandureid paigaldada
rattalaagri juurde. Sel isel juhul on anduriketas sisse ehitatud laagri separaatorisse ning
andurikettaks on vahelduv magnetväli.
Reeglina on akti vsete anduritena kasutusel Hal i efektil põhinevad või si s magnet-
takistuslikud andurid. Nende andurite poolt genereeritava signaalpinge suurus ei sõltu
andurketta pöörlemissagedusest, nagu see oli induktiivanduritel. Küll on aga signaali
vaheldumise sagedus proportsionaalne ratta pöörlemissagedusega, nagu see oli ka
indukti vanduritel.
Akti vsetelt anduritelt antakse
digitaalne signaal arvutile ühe juhtme kaudu. Võrreldes
indukti vanduritega, on sel isel ülekandemeetodil vähem võimalusi häirete tekkeks.
Akti vsete andurite
eeliseks indukti vandurite ees on veel:
•
Peale pöörlemissageduse, võimaldab anda infot ka pöörlemissuuna kohta
•
Annab diagnostilist infot ka anduri ja anduriketta vahelisest pilust
Hal `i efektil põhinevad aktiivsed andurid
Halli efekt: eelpingestatud pooljuhis indutseeritakse magnetvälja mõjutusel
eelpingestusega ristisuunaline pinge, mil e suurus sõltub magnetvälja tugevusest ja
suund magnetvälja
suunast .
Halli efektil põhineval pöörlemissageduse anduri pooljuhi juurest li gub mööda
anduriketas, mil es on vahelduv magnetväli. See vahelduv magnetväli genereerib
pooljuhis
vahelduva pinge, mis elektroonilises võimendiplokis võimendatakse ja
muudetakse ABS arvutile saadetavaks digitaalseks signaaliks
Magnetväli
Genereeritud pinge
Pooljuh
t
Eelpinge Hall´i efekti kasutatakse tavaliselt nukkvõlli asendi anduri ehituses.
Sel eks, et arvuti saaks juhtida süüteküünalde ja
pihustite tööd – mil isel hetkel peab
silindris toimuma säde ja mil isel hetkel
pihustamine , peab arvuti pidevalt saama
informatsiooni kolbide asendi kohta silindrites. Seda infot on võimalik saada nukkvõl i
asendi kaudu, sest nukkvõlli pöörlemise ajal vastab iga silindri kolvi ülemisele surnud
seisule survetakti lõpus nukkvõlli erinev asend.
•
Andurina on jäl egi kasutusel Hall´i andur, kus magneti li kumisel anduri juurest
läbi, tekitatakse elektriline signaal.
•
Magnetvöö paikneb nukkvõl i jaotushammasrattas. Iga silindri kohta on erineva
tugevusega magnetväli, tänu mil ele tekitatakse ka Hall´i anduris erinevad
signaalid iga silindri kohta, kus
kolb on jõudnud ülemisse surnud seisu survetakti
lõpus.
Magnetvöö
MAGNET-TAKISTUSLIKUD AKTIIVSED ANDURID
Magnet-takistusliku anduri element koosneb
vaheldumisi paigaldatud permal oi ja räni
õhukestest kihtidest. Permal oi –
väikese
magnetilise takistusega raud-nikkelsulam
.
Räni elektriline takistus on sõltuv ted
a läbiva
magnetvoo
suurusest ja suunast.
Anduri elemendi juurest läbili kuv v
ahelduv
magnetväli
muudab
vastavalt
ma
gnetvoo
suunale elemendi elektrilist takistu
st, mis
töötatakse
läbi
anduri
ehituses
olevas elektronplokis. ABS või ESP arvutile saa
detakse
pinge 0,8 või 1,6V, sõltuvalt magnetvoo
suunast
läbi elemendi.
Tööpõhimõte: Esitatud magnetvoo
suuna korral on elemendi takistus suur
ja elementi läbib vool 7mA.
Anduri
elektronplokk
Tööpõhimõte: Esitatud magnetvoo
suuna korral on elemendi takistus
väike ja elementi läbib vool 14 mA.
Tööpõhimõte: Andurketta pöörlemisel
vaheldub magnetvoo suund elemendi
juures, tekitades muutuva takistuse.
Voolutugevus kõigub 7 ja 14 mA vahel
sagedusega, mis on proportsionaalne
andurketta pöörlemissagedusega.
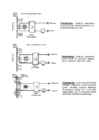
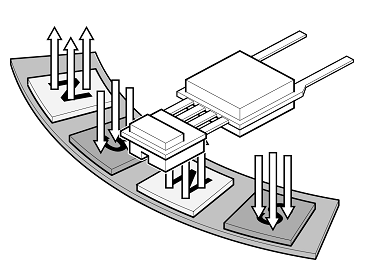
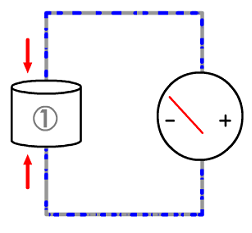
PIESOELEKTRILISE ELEMENDI TÖÖTAMINE
Piesoelektrilisel elemendil võib täheldada kahesugust efekti:
1. Otsene
2. Pööratud
Otsene efekt tähendab seda, et piesoelektrilise elemendi kristal ide kokkusurumisel
tekib kristal i vastaspindadel pinge. Kristal ide lahtivenitamisel on pinge vastupidise
polaarsusega.
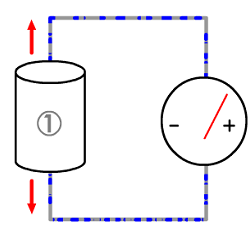
Pööratud efekt tähendab seda, et piesoelektrilise elemendi
kristallide vastaspindade
mõjutamisel elektrilise pingega, kristall kas
paisub või tõmbub kokku, sõltuvalt pinge
polaarsusest.
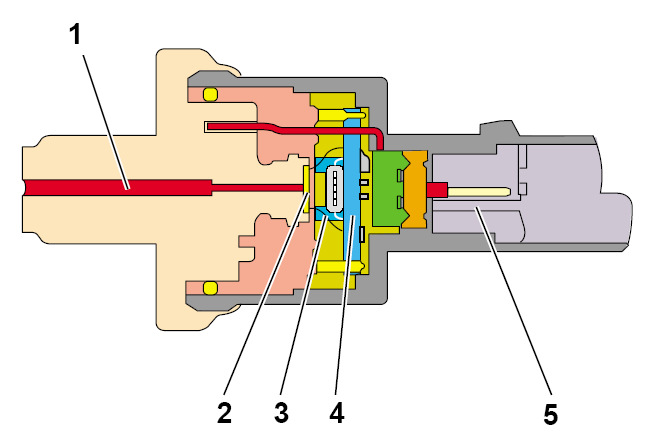
Piesoelektriline andur: Al järgneval joonisel on esitatud piesoelektriline rõhuandur.
Kanali 1 kaudu juhitakse piesoelektrilise elemendini (2) rõhk (kas gaasi või mingi
vedeliku rõhk), mis elemendile mõjudes tekitab sel e vastaspindadel elektrilise pinge.
See pinge juhitakse
elektroonilisse plokki (4) ja sealt edasi mootori juhtarvutisse.
1 – rõhukanal
2 – terasmembraanil paiknev
piesoelektriline element
3 – elektriline ühendus
4 – signaali töötlemise
elektrooniline plokk 5 - pistik
λ
-andurid.
λ-andurid on ette nähtud
küttesegu koostise kontrol imiseks. λ-andur paikneb välja-
lasketorustikus ja tegelikult hindab λ-andur vaba hapniku kogust heitgaasis: kui
heitgaasis oli palju vaba hapnikku, siis mootori silindrisse antud küttesegu oli
lahja (palju
õhku vähe kütust); kui aga vaba hapnikku oli vähe, si s ilmselt oli segu rikas (vähe õhku,
palju kütust). λ-andur
saadab elektrilise signaali küttesegu koostise kohta mootori
arvutile, mis teeb sellest vajaliku järelduse: kui segu oli lahja, siis antakse pihustile
korraldus rikastada segu ja vastupidi.
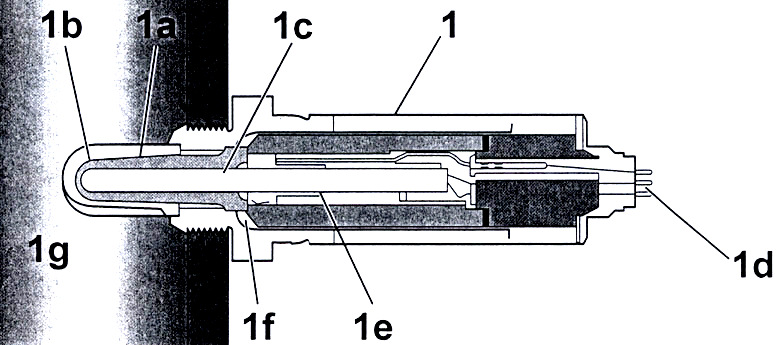
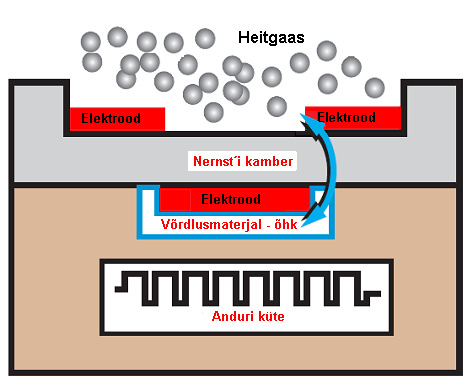
λ-anduri ehitus ja töötamine:
1 - λ-andur,
1a – tsirkooniumoksi dist
ZrO2 tuub ,
1b – õhuke (5µm) plaatinakate,
1c – plaatinakattega siseelektrood koos välisõhu juurdepääsuga,
1d – pistik,
1e – soojenduselement,
1f - õhu juurdepääs,
1g – heitgaas
λ-anduri tööpõhimõte: Anduri normaalne
töötemperatuur on 300°C. Tsirkooniumoksiidist
tuubil on omadus juhtida läbi hapniku ioone. Kui
tuubi ümbritseb rikkast küttesegust
moodustunud heitgaas, mil es on vähe vaba hapnikku, siis hakkavad tuubi sisemusest,
kus on puhas õhk ja hapniku ioone palju, hapniku
ioonid li kuma välispinna poole, kus
hapniku ioone peaaegu polegi. Ioonide liikumine tekitab tuubi sise- ja välispinna vahel
umbes 1voldilise pinge, mis antakse arvutile. Vastavalt sel ele signaalile annab arvuti
pihustile korralduse lahjendada küttesegu.
Kui aga heitgaasis on palju vaba hapnikku (lahja küttesegu), si s hapniku ioonid tuubi
sisemusest välispinna poole li kuma ei hakka ning tsirkooniumoksi dist tuubi sise- ja
välispinna vahel elektrilist pinget peaaegu ei ole. Ka see signaal antakse arvutile ning
arvuti annab korralduse rikastada küttesegu. Lõpptulemusena hoiab arvuti küttesegu
normaalkoostisega, tänu mil ele hoitakse kokku kütust ning
heitgaasid on puhtamad.
Kaasaegsetel λ-anduritel on sees soojenduselement, mis ki rendab anduri soojenemist
normaalse töötemperatuurini.
Uuematel
mootoritel kasutatakse kahte λ- andurit: üks paikneb enne katalüsaatorit ja
teine on katalüsaatori taga. Tagumise anduri ülesandeks on kontrol ida katalüsaatori
tööd. Kui
katalüsaator hoiab heitgaasid puhtana, si s tagumise λ- anduri signaal on
püsiv, umbes 0,4…0,5V. Kui aga katalüsaator enam ei toimi, si s esimese ja tagumise
anduri signaalid on peaaegu ühesugused ja muutuvad pi rides 0…1V.
Λ-andur,
mis
paikneb
pärast
katalüsaatorit, informeerib mootori
juhtarvutit
katalüsaatorist
väljuva
heitgaasi puhtusest: reeglina peab
sel e anduri signaal olema stabi lselt
460mV. Kõrvalekalded sel est vi tavad
kas küttesegu koostise, süüteseadme-
te, katalüsaatori või heitgaasi torustiku
riketele.
λ- anduritel võib ol a kas 1, 2,3 või 4 ühendusjuhet:
Ühejuhtmelistel anduritel on ainult signaali juhe, massiühendus saadakse
metal korpuse
kaudu.
Kahejuhtmelistel anduritel on üks signaali- ja teine massijuhe.
Kolmejuhtmelistel anduritel on kaks
juhet anduri kütteks ja üks juhe on
signaalijuhtmeks. Massiühendus on läbi korpuse.
Neljajuhtmelisel
anduril on kaks küttejuhet ja kaks signaalijuhet, mil est üks on
massiühendus.
Kaasajal massiühendust läbi korpuse eriti ei kasutata, kuna
pinged on väikesed ja
väikseimgi oksi di- või mustusekiht keermesli te vahel häirib anduri tööd.
ON/OFF tüüpi λ
-anduri tööpõhimõtte kordamine Seni kasutusel olnud ON/OFF tüüpi λ-andurid töötavad põhimõttel, et Nernst´i kambrist
(ZrO2 ) läbili kuvad hapniku ioonid tekitasid elektroodide vahel pinge 0,1 kuni 0,9 V, mis
iseloomustas heitgaasis olevate hapniku ioonide hulka:
•
Rikkamal segul aga on hapniku ioone vähem ning seega si s pinge kõrgem
(ioonid hakkavad intensi vsemalt li kuma sealt, kus neid on rohkem (õhk) sinna,
kus neid on vähem.
•
Lahjemal küttesegul on hapniku ioone rohkem ning seetõttu ka tekitatud pinge
madalam.
Anduri signaali järgi mootori arvuti muutis segu rikkamaks või lahjemaks, keskmiselt 8
korda sekundis.
Sel ise anduri signaali järgi ei ole võimalik kindlaks määrata segu koostist (λ väärtust).
Proportsionaalse signaaliga (enne katalüsaatorit paiknev) λ
-andur
Proportsionaalse signaaliga λ-andur annab mootori arvutile pidevat ja täpset infot
küttesegu koostise kohta (tavaline λ-andur
teatab ainult, kas küttesegu oli rikas või
lahja). Tänu sel ele infole saab mootori arvuti täpsemalt
korrigeerida kütuse
pihustusaega.
Proportsionaalse signaaliga λ-anduri tööpõhimõte:
Proportsionaalse signaaliga λ-anduri ehituse keraamilisse plokki lisandub mõõtekamber
ja kontrollkamber. Mõõtekambrisse antakse mootori heitgaas. Mootori
juhtarvuti annab
kontrollkambri elektroodidele sellise pinge, et mõõtekambri heitgaasi hapniku ioonide
tase oleks vastavuses λ = 1. See vool registreeritakse mootori arvutis ja see
iseloomustab heitgaasi hapniku sisaldust. Seega, proportsionaalse signaaliga λ - anduri
signaal saadakse läbi arvuti andurile antava voolutugevusega, mis hoiab mõõtekambris
λ = 1 koostisega heitgaasi.
Proportsionaalse signaaliga λ
-anduri tööpõhimõte Proportsionaalse signaaliga λ-andur paikneb katalüsaatorisse sissevoolul.
Võrreldes ON/OFF tüüpi λ-anduriga, on proportsionaalne andur täpsem ja ki rem.
Sel e λ-anduriga on võimalik saavutada küttesegu koostiseks λ = 1± 02
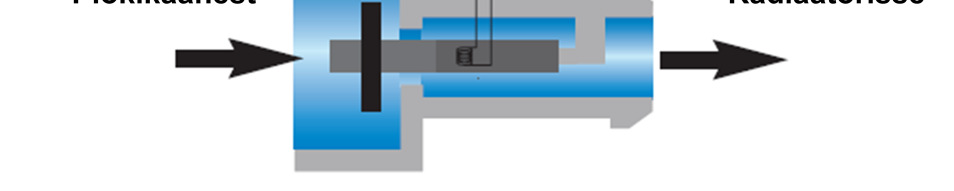
Elektriliselt juhitav termostaat Elektriliselt juhitav termostaat võimaldab kütuse kokkuhoidu umbes 1% ja heitgaasi
saaste vähenemist, võrreldes tavalise termostaadiga.
Sel ine termostaat suudab hoida stabiilsemat temperatuuri, vastavalt mootori
töörežiimile, ja see on nüüd tõstetud 105°C-ni.
Elektriliselt juhitava termostaadi tööelemendiks on, nagu tavalistel termostaatidelgi,
kuumusega
paisuv aine – tseresi n. Termostaadi avanemistemperatuuriks on määratud
105°C. Peale sel e aga on termostaadi ehituses mootori arvuti poolt juhitav küttespiraal.
Mootori suurematel koormustel, kui tekib ülekuumenemise oht, tõstab mootori arvuti
pulseeriva
impulss -signaali abil küttespiraali ja sellega ka tseresiini temperatuuri, et
avada termostaat varem (mõnikord isegi jahutusvedeliku temperatuuril 75°C).
Kokkuvõttes saab tänu elektriliselt juhitavale termostaadile mootori arvuti osaleda
mootori töötemperatuuri määramisel (tavalistel termostaatidega seda võimalust ei ole).
ELEKTROONILISE JUHTIMISEGA GENERAATOR Generaatori elektrooniline juhtimine võimaldab mootori arvutil kaasa rääkida generaatori
poolt elektrilise pinge suuruses mootori töö eri režiimidel.
Mootori ki rendamisel:
Arvuti vähendab generaatori pinget minimaalselt lubatavani – 13,2V. Tänu sel ele on
generaatori takistus mootori ki rendamisele ka minimaalne.
Mootori aeglustamisel:
Arvuti tõstab generaatori pinget kuni 14,5V. See võimaldab aku laadimist ja ki rendab ka
mootori pidurdust.
Mootori stabiilsel töötamisel:
Generaatori poolt väljaantav pinge reguleeritakse 13,5V-ni.
Generaator ja mootori juhtarvuti on omavahel ühendatud BSS (Bit Synchron
Singleware)
liiniga , mis kannab järgmist informatsiooni:
•
Pinge reguleerimist
•
Rikkeinfot
• Aku
laadimise vajadust
• Voolutugevuse infot
• Generaatori temperatuuri (sisseehitatud anduri abil)
• Generaatori klass ja valmistajatehase info
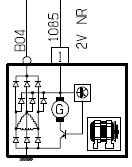
Ühendus 1:
Dialoog mootori arvutiga
klemmi 38 kaudu pistikupesalt 53V NR (Must),
või klemmi E2 kaudu pistikupesalt 32V GR (Hal ).
Generaatori vahetamisel tuleb kontrol ida tema
programmeerimise taseme klassi, mida
saab kätte diagnostikaseadme abil.
Tasemeklasse on kolm:
-klass 8 (MELCO)
-klass 12 (MELCO or VALEO)
-klass 15 (BOSCH)
Generaatori iseloomustus sõltub tema valmistajatehasest, mida tuleb arvestada
generaatori vahetusel, uute andmete sisestamisel.












































































Kõik kommentaarid