Mehaanika põhiülesanne- Leida keha asukoht mistahes ajahetkel. Punktmass- keha, mille mõõtmed jäetakse lihtsuse mõttes arvestamata. Suhteline liikumine- liikumist vaatleme alati mingi teise keha e. Taustkeha suhtes. Taustkeha valikust sõltub keha liikumine. Nihe- nihe on vektor, mis ühendab keha algasukohta lõppasukohaga. Kiirendus- näitab kiiruse muutumise kiirust. Valem: a=(v-v0)/t Ühik: m/s^2 Kinemaatika põhivalemid ühtlaselt muutuva liikumise korral: s=v0*t+at^2 /2 v=v0+at v^2-v0^2=2as v0= v(null)- algkiirus v^2= v ruudus- lõppkiiruse ruut v0^2= v(null)ruudus- algkiiruse ruut m/s^2= meetrit sekundruudus Mehaanika põhiülesanne- Leida keha asukoht mistahes ajahetkel. Punktmass- keha, mille mõõtmed jäetakse lihtsuse mõttes arvestamata. Suhteline liikumine- liikumist vaatleme alati mingi teise keha e. Taustkeha suhtes. Taustkeha valikust sõltub keha liikumine.
Trigonomeetriliste funktsioonide väärtuste märgid Trigonomeetriliste funktsioonide väärtusi 0 1 0 -1 1 0 -1 0 0 1 - 0 - - 1 0 - 0 Taandamisvalemid Negatiivse nurga Trigonomeetrilised põhivalemid!!! trigonomeetrilised funktsioonid Kahe nurga summa ja vahe valemid Kahekordse nurga valemid
Trigonomeetria põhivalemid ja nende järeldused: sin 2 + cos 2 = 1 2 2 2 sin = 1 - cos sin = 1 - cos 2 2 2 cos = 1 - sin cos = 1 - sin sin = cos( 90° - ) ; cos = sin ( 90° - ) sin sin tan = sin = cos tan cos = cos tan 1 1 tan = ; cot = cot tan 1 1 + tan 2 = cos 2 Kahekordse nurga valemid: sin 2 = 2 sin cos cos 2 = cos 2 - sin 2 2 tan tan 2 = 1 - tan 2 Liitmisvalemid: cos( ) = cos cos sin sin + tan tan tan ( ) = 1 tan tan + + + + sin ( ) = sin cos cos sin
Põhivalemid sin cos tan = cot = sin + cos = 1 2 2 cos sin 1 1 1 1 sec = cos ec = 1 + tan 2 = 1 + cot 2 = cos sin cos 2 sin 2 Kahekordse ja poolnurga valemid 2 tan tan 2 = sin 2 = 2 sin cos cos 2 = cos 2 sin 2 1 - tan 2 1 - cos = 2 sin 2 1 + cos = 2 cos 2 ...
Trigonomeetria põhivalemid ja nende järeldused: sin 2 + cos 2 = 1 2 2 2 sin = 1 - cos sin = 1 - cos 2 2 2 cos = 1 - sin cos = 1 - sin sin = cos( 90° - ) ; cos = sin ( 90° - ) sin sin tan = sin = cos tan cos = cos tan 1 1 tan = ; cot = cot tan 1 1 + tan 2 = cos 2 Kahekordse nurga valemid: sin 2 = 2 sin cos cos 2 = cos 2 - sin 2 2 tan tan 2 = 1 - tan 2 Liitmisvalemid: sin ( + ) = sin cos +cos sin cos( + ) = cos cos +sin sin tan + tan tan (+ ) = 1 +tan tan...
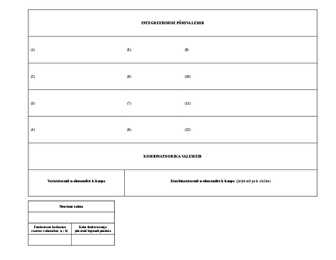
INTEGREERIMISE PÕHIVALEMID (1) (5) (9) (2) (6) (10) (3) (7) (11) (4) (8) (12) KOMBINATOORIKA VALEMEID Variatsioonid n-elemendist k-kaupa Kombinatsioonid n-elemendist k-kaupa (järjekord pole oluline) Newtoni valem Funktsiooni keskmine Kahe funktsiooniga väärtus vahemikus [a ; b] piiratud kujundi pindala Lineaarne 1. järku DV DIFERENTSIAALVÕRRANDID ...
Arvväärtused: a) 30° 45° 60° b) 0°,360°/90°/180°/270° sin 1/2 ,2/2, 3/2 0/1/0/1 cos 3/2, 2/2, 1/2 1/0/1/0 tan 3/3, 1, 3 0//0/ cot 3, 1, 3/3 /0//0 Põhivalemid: Täisnurkadevalemid: sin²+cos²=1 sin=cos(90°) tan=sin/cos cos=sin(90°) 1+tan²=1/cos² tan=cot(90°) 1+cot²=1/sin² cot=tan(90°) cot=cos/sin tan*cot=1 Taandamisvalmeid: a) sin(n*360°+)=sin b) IIv sin(180°)=sin cos(n*360°+)=cos =cos tan(n*360°+)=tan =tan cot(n*360°+)=cot =cot c)III veerand d)IV veerand e)nega nurk sin(180°+)=sin sin(360°)=sin sin()=sin =cos =cos cos()=cos
Trigonomeetria põhivalemid: 1) sin² + cos² = 1 Ühe ja sama nurga siinuse ja koosinuse ruutude summa on võrdne ühega. sin 2) tan = cos Nurga tangens võrdub nurga siinuse ja koosinuse jagatisega. 1 3) 1 + tan = 2 cos 2 Näide 1. sin² 20² + cos² 20° = 1 sin 20 0 Näide 2. = tan 20 0 cos 20 0
Ühe muutuja funtsiooni diferentsiaal- ja integraalarvutuse põhivalemid Funktsioon Diferentseerimisvalem Põhiintegraal Konstant a '=0 adx =axC n-1 n1 Astmefunktsioon x ' ' ' =nx x x ' ' dx = n1 C 1 2 x '=
Põhikooli matemaatikakursuse põhivalemid Tehe Valem 1. Harilike murdude liitmine a c ad + bc + = b d bd 2. Harilike murdude lahutamine a c ad - bc - = b d bd 3. Harilike murdude korrutamine a c ac = b d bd 4. Harilike murdude jagamine a c ad : = b d bc 5. Astmete korrutamine ...
cot tan ± cot tan ± cot · Negatiivse nurga trigonomeetrilised funktsioonid sin ( - ) = -sin cos( - ) = cos tan ( - ) = - tan cot ( - ) = - cot · Põhivalemid sin 2 + cos 2 = 1 sin tan = cos cos cot = sin 1 1 + tan 2 = cos 2 1 1 + cot 2 =
Füüsika induktiivsuse põhivalemid ja mõisted 1. Elektromagnetism käsitleb elektri- ja magnetnähtuste vahelisi seoseid ja nendevahelisi protsesse . 2. Elektromagneetiline induktsioon (EMI) elektrivälja teke magnetvälja muutumise mõjul 3. Rootor liikuv osa , mis pöörleb , koosneb kindlal viisil asetsevatest püsimagnetitest 4. Staator paigal seisev osa, vasktraadist mähis 5. Pööriselektri väli elektro magnetilise induktsiooni mõjul tekkinud elektriväli , nimetatakse ka induktsiooni elektriväljaks,jõujooned on alguse ja lõputa ning kinnise, tekkinud on ta induktsiooni elektriväljas 6. Elektromotoorjõud näitab maksimaalset pinget mida antud vooluallikas suudab antud vooluringis tekitada 7. Induktsiooni elektromotoorjõud pinge mis tekib magnetväljas liikuva juhtmelõigu otstele U= vl B singamma U-pinge (1W) v-kiirus (m/s) l- juhtmelõigu pikkus (1m) 1. ...
Trigonomeetriliste avaldiste teisendamine Trigonomeetria põhivalemid sin 2 + cos 2 = 1 sin tan = cos 1 1 + tan = 2 cos 2 cos cot = sin Taandamisvalemid Taandamisvalemite rakendamiseks piisab järgmise reegli teadmisest: nurkade - , + ja 2 - korral teiseneb nende siinus avaldiseks sin , koosinus avaldiseks cos ja tangens avaldiseks tan , mille ees olev märk ("+" või "-") sõltub sellest, milline on
Täiendusnurga valemid. sin (90 - ) =cos cos (90 - ) = sin tan (90 - ) = 1/tan = cot cot (90 - ) = 1/cot = tan Negatiivse nurga siinus, koosinus, tangens ja kootangens. sin (- ) = -sin cos (- ) = cos tan (- ) = -tan cot (- ) = -cot Trigonomeetria põhivalemid ja nende järeldused. sin 2 + cos2 = 1 tan =sin /cos cot =cos /sin tan cot =1 1+ tan 2 = 1/cos2 1 + cot2 = 1/sin2 sin 4 + cos4 = 1 - 2 sin2 cos2 sin 6 +cos6 = 1 - 3sin 2 cos2 Kahe nurga summa ja vahe siinus, koosinus, tangens ja kootangens. sin ( + ) =sin cos + cos sin tan ( + ) = tan + tan / (1 - tan tan ) sin ( - ) = sin cos - cos sin tan ( - ) = tan - tan / (1 + tan tan )
cot tan ± cot tan ± cot · Negatiivse nurga trigonomeetrilised funktsioonid sin ( - ) = -sin cos( - ) = cos tan ( - ) = - tan cot ( - ) = - cot · Põhivalemid sin 2 + cos 2 = 1 sin tan = cos cos cot = sin 1 1 + tan 2 = cos 2 1 1 + cot 2 =
cot tan ± cot tan ± cot · Negatiivse nurga trigonomeetrilised funktsioonid sin ( - ) = -sin cos( - ) = cos tan ( - ) = - tan cot ( - ) = - cot · Põhivalemid sin 2 + cos 2 = 1 sin tan = cos cos cot = sin 1 1 + tan 2 = cos 2 1 1 + cot 2 =
Käänupunktid. Definitsioon. Öeldakse, et joon y = f(x) on kumer (nõgus) piirkonnas X, kui joone puutuja igas punktis kulgeb ülapool (allpool) seda joont. Kui y teine tuletis on suurem kui 0 siis on nõgus aka HAPPY face. Kui y teine tuletis on väiksem kui 0 siis on kumer aka SAD face. 25) Funktsiooni globaalsed ekstreemumid. 26) Newtoni meetod http://www.mathema.ee/mathematica/ptk7/ptk7.htm osa 2.2 27) Algfunktsioon ja määramata integraal. 28) Integreerimise põhivalemid. 29) Tehetega seotud integreerimisreeglid. 30) Muutujate vahetus määramata integraalis. Muutujate vahetuse valem: For more information go to porns lecture nr 11 31) Ositi integreerimine. For more information go to porns lecture nr 11 32) Määratud integraal. 33) Tasandilise kujundi pindala. 34) Pöördkeha ruumala. 35) Määratud integraali ligikaudne arvutamine.
2 cos x + x + x y ' = lim = lim x 2 lim cos x x 0 x 2 x / 20 x0 2 2 2 = cos x MOTT. 2 Ülesanne (kodus): Leida y = cos x tuletis. Diferentseerimise põhivalemid 1 y = const y' = 0 y = arcsin x y' = 1- x2 y = x y ' = x -1 1 1 y = arccos x y' = - y= x y' = 1- x2 2 x 1 1 1 y = arctan x y' =
2. Diferentsiaal määramata integraalist võrdub integraalialuse avaldisega: d f ( x ) dx = f ( x ) dx 3. Määramata integraal mingi funktsiooni tuletisest võrdub selle funktsiooniga pluss suvaline integreerimiskonstant: F ( x ) dx = F ( x ) +C 4. Konstantse teguri võib tuua integraalimärgi ette: kf ( x ) dx = k f ( x ) dx , kus k = const 5. Summat ja vahet võib integreerida liikmeti: [ f ( x ) ± g ( x )] dx = f ( x ) dx ± g ( x ) dx INTEGREERIMISE PÕHIVALEMID Integreerimise põhivalemid saadakse tuletiste põhivalemite "tagurpidi" rakendamisel (vt tuletiste tabel paremalt vasakule). Nende kontrollimiseks tuleb leida parema poole tuletis, mis peab võrduma intergraalialuse funktsiooniga 1. dx = x +C ; x n +1 x dx = + C, n -1 ; n 2. n +1 dx 3. x = ln x + C , Tõestus (kuna pisut erineb tuletiste tabelis olevast).
keskkonnas. Referaat on tehtud vabale netientsüklopeediale Vikipeedia ja keskkonnafüüsika praktikumi juhendile toetudes ning eeldab, et antud teemaga on praktikumi jooksul lähemalt tutvust tehtud. Mina kahjuks praktikumi käigus kuuldelävede ja müra taseme mõõtmisega kokku ei puutunud, kuna vastavad aparaadid olid lihtsalt vigased. Seega piirdub minu ettekanne üldise informatsiooniga ning ei lasku arvutustesse. Referaadis toon aga välja ka mõned põhivalemid. Enne, kui põhiteemade juurde pöördun, räägin natuke ka helist kui füüsikalisest nähtusest ning selle omadustest. Heli Heli on keskkonnas leviv elastsuslaine (gaasis või vedelikus - pikilaine, tahkes - ka ristlaine) võnkumine, mis levib õhus kiirusega 344 m/s. Füsioloogiliselt suudab normaalse kuulmisega inimene tajuda õhus levivaid helisid võnkesagedusega 16 kuni 20 000 Hz (väikelapsed isegi kuni 40 000 Hz). Tajupiiridest kõrgemad ja madalamad
Et f ( x ) dx = F ( x ) +C kus F ( x ) = f ( x ) , siis F ( x ) dx = F ( x ) +C m.o.t.t. 4. kf ( x ) dx = k f ( x ) dx . Diferentseerime paremat poolt [k f ( x ) dx] = k [ f ( x ) dx ] = kf ( x ) (viimane vt omadus nr 1) m.o.t.t. 5. [ f ( x ) + g ( x )] dx = f ( x ) dx + g ( x ) dx Diferentseerime valemi paremat poolt [ f ( x ) dx + g ( x ) dx] = [ f ( x ) dx] +[ g ( x ) dx] = f ( x ) + g ( x ) m.o.t.t. INTEGREERIMISE PÕHIVALEMID Integreerimise põhivalemid saadakse tuletiste põhivalemite "tagurpidi" rakendamisel (vt tuletiste tabel paremalt vasakule). Nende kontrollimiseks tuleb leida parema poole tuletis, mis peab võrduma intergraalialuse funktsiooniga 1. dx = x +C ; x n +1 x dx = + C, n -1 ; n 2. n +1 dx 3. x = ln x + C , Tõestus (kuna pisut erineb tuletiste tabelis olevast).
TRAPETS 13. RISTKÜLIK Jrk. number NÄIDISLEHT Kujundi nimetus Valemi tüüp Tähis Ühik, milles mõõdetakse x) Kujund Põhivalemid PINDALA (S) [ühik2] ÜMBERMÕÕT (C) [ühik] S = näiteks P = näidis x näiteks y S = näidis z P= X - ....... Y - ...... y x z
· kõrgus ehitamisel 146,6 meetrit · kõrgus praegu 137,3 meetrit · küljepikkus ehitamisel 232,4 meetrit · küljepikkus praegu 230,37 meetrit · maht ehitamisel 2 521 000 kuupmeetrit · maht praegu umbes 2 351 000 kuupmeetrit · kiviplokkide arv ligi 2,25 miljonit · keskmine kiviploki kaal umbes 2,5 tonni (esineb ka 15 ja isegi 70 tonni raskusi plokke) · umbkaudne kaal 6,5-7 miljonit tonni · astmeid 203 Siin on põhivalemid põhjaks oleva ruudu küljepikkuse alusel ülejäänud joonisel toodud mõõtude arvutamiseks. H = 2 * A / Pi D = SQRT( ( A / 2)^2 + ( 2 * A / Pi )^2 ) S = SQRT( 2 * ( A / 2 )^2 + ( 2 * A / Pi )^2 ) Siin aga mõned valemid selle kohta, kuidas ülejäänud mõõtudest tuletada püramiidi põhja küljepikkust. A = SQRT( 4 * D^2 * Pi^2 / ( Pi^2 + 16) ) A = SQRT( ( 2 * Pi^2 * S^2 ) / ( Pi^2 + 8 ) ) A = H * Pi / 2
1 ÜHE MUUTUJA FUNKTSIOON. TEMA MÄÄRAMISPIIRKOND DEFINITSIOON 1. Kui muutuja x igale väärtusele hulgast X on mingi eeskirja f abil vastavusse seatud lõplik reaalarv y, siis öeldakse, et hulgal X on määratud FUNKTSIOON ja seda tähistatakse y = f(x). DEFINITSIOON 2. Muutuja x väärtuste hulka, mille puhul f(x) väärtus on lõplik, nimetatakse funktsiooni y = f(x) MÄÄRAMISPIIRKONNAKS. X = { x R; f(x) väärtus on lõplik}. PÕHILISED ELEMENTAARFUNKTSIOONID: 1. Astmefunktsioonid: y = x , Q; 2. Eksponentfunktsioonid: y = ax, a > 0, a 1; 3. Logaritmfunktsioonid: y = loga x, a > 0, a 1; 4. Trigonomeetrilised funktsioonid: y = sin x, y = cos x, y = tan x, y = cot x; 5. Arkusfunktsioonid: y = arcsin x, y = arccos x, y = arctan x, y = arccot x. 2 LIITFUNKTSIOON DEFINITSIOON 1. Funktsiooni, mille argumendiks ei ole sõltumatu...
=/t=2f Nurkkiirus f=/2=1/T=N/t Sagedus T= 2/=1/f=t/N Periood 2 2 ak=v /t= r Kesktõmbekiirendus x=x0sint Harmooniliste võnkumiste võrrand v=l/t=/T Laine levimiskiirus =v/f Lainepikkus =v/r Seos nurk- ja joonkiiruse vahel MOLEKULAARFÜÜSIKA 1.Põhivalemid, mõõtühikud: Gaasi rõhk p=2/3nEk 1Pa=1N*m2 ; 1at=9,81N*m2 ; 1mmHg Absoluutne temperatuur T=t+273 , t=T-273 0K=-2730C Molekulide kineetiline Ek=3/2kT Ek=1J ; T=K ; k=1,28*10-23J/K Energia ja temperatuur Tihedus Ruumala Mass Gaasi rõhk ja temperatuur Ideaalse gaasi pV=m/MRT olekuvõrrand Gaasi üleminek ühest p1V1/T1 =p1V1/T1 olekust teise Kilomoolid gaasi koguses pV/T=R 2.Seadused ja põhiprintsiibid:
cot tan ± cot tan ± cot · Negatiivse nurga trigonomeetrilised funktsioonid sin ( - ) = -sin cos( - ) = cos tan ( - ) = - tan cot ( - ) = - cot · Põhivalemid sin 2 + cos 2 = 1 sin tan = cos cos cot = sin 1 1 + tan 2 = cos 2 1 1 + cot 2 = sin 2
Integraal Algfunktsiooni ja määramata integraali mõiste. Funktsiooni f(x) algfunktsiooniks nimetatkse niisugust funktsiooni y=F(x), mille tuletis võrdub funktsiooniga f(x): F´(x)=f(x) Algfunktsioone võib olla palju sest suvalist konstanti C, ei tea. Funktsiooni y=f(x) määramata integraaliks nimetakse avaldist y = f ( x) dx = F(x) + C, kus F(x) on funktsioonif(x) algfunktsioon ja c konstant , mida nimetatakse inegreerimiskonstandiks. Integraali seos tuletisega Integreerimise põhivalemid saadakse tuletiste põhivalemite taguspidi rakkendamisel. Nende kontrollimiseks tuleb leida parema poole tuletis, mis peab võrduma integraalialuse funktsiooniga. Mõnede (xa, sin x, 1/x) integreerimisvalemite tuletamine. Tuletise rakendused Lopitali valem Ligikaudne arvutamine Ritta arendamine Rolli ja lagrange teoteemid Funktsiooni uurimine Joone puutuja ja võrrand Numbriline arvutamine Kiirused ja kiirendused-füüsikalised rakendused Integraali arvutamine tabeli kaudu
keemilistest ühenditest orgaanilised ained. Selle pöördprotsessiks on aeroobne ja anaeroobne hingamine ja biolagunemine. CO2 + H2O + h <=> { CH2O} + O2 (Fotosüntees Aeroobne biolagunemine) { CH2O } => CO2 + CH4 (Anaeroobne biolagunemine) (6CO2 + 6H2O + energia C6H12O6 + 6O2) Summaarne võrrand: 6CO2 + 12H2O = C6H12O6 + 6H2O Bioloogiline energiaringe algab fotosünteesiga ja lõpeb hingamisega. Fotosünteesi ja hingamise põhivalemid on vastavalt (1 ja 2) CO2 + H2O + 8hv -> CH2O + O2 . (1) CH2O + O2 -> CO2 + H2O + 6ATP (2) 16. Geoloogiline ringe. Nimetage ka põhilised protsessid. Looduses toimivad lisaks elementide ringetele geoloogiline ringe ja vastavad alamringet: tektooniline, hüdroloogiline, kivimite ja biogeokeemiline. Kivimite ringluses osalevad tard-(laava), sette- ja metamorfsed kivimid. Hüdroloogiline ringe seisneb vee ülekandes ookeanidest
keemilistets ühenditest orgaanilised ained. Selle pöördprotsessiks on aeroobne ja anaeroobne hingamine ja biolagunemine. CO2 + H2O + h <=> { CH2O} + O2 (Fotosüntees Aeroobne biolagunemine) { CH2O } => CO2 + CH4 (Anaeroobne biolagunemine) (6CO2 + 6H2O + energia C6H12O6 + 6O2) Summaarne võrrand: 6CO2 + 12H2O = C6H12O6 + 6H2O Bioloogiline energiaringe algab fotosünteesiga ja lõpeb hingamisega. Fotosünteesi ja hingamise põhivalemid on vastavalt (1 ja 2) CO2 + H2O + 8hv -> CH2O + O2 . (1) CH2O + O2 -> CO2 + H2O + 6ATP (2) 16. Geoloogiline ringe. Nimetage ka põhilised protsessid. Looduses toimivad lisaks elementide ringetele geoloogiline ringe ja vastavad alamringet: tektooniline ringe, hüdroloogiline ringe, kivimite ringe ja biogeokeemiline ringe. Kivimite ringluses osalevad tard-(laava), sette- ja metamorfsed kivimid. Hüdroloogiline ringe
4.12 Teravnurga siinuse, koosinuse ja tangensi leidmine 4.13 Teravnurkse kolmnurga lahendamine Iseloomustades treppi, mäenõlva jne tõusu seisukohalt kasutatakse tõusunurka e nurka objekti ja horisondi vahel või siis tõusunurga tangensit, mida nimetatakse tõusuks. Tõusu tähistatakse tavaliselt tähega k (k=tan a). Kolmnurga lahendamine tähendab kolmnurga puuduvate nurkade ja külgede leidmist. 4.14 Teravnurga siinuse, koosinuse ja tangensi vahelised seosed Trigonomeetria põhivalemid on: Trigonomeetria II 5.1 Positiivsed ja negatiivsed nurgad Vastupäeva pöörlemine on positiivne, päripäeva negatiine. Kiire asend, millest pöörlemine algab, on alghaar e liikumatu haar, kiire lõppasend on lõpphaar e liikuv haar. Iga nurk on esitatav kujul 5.2 Nurkade liigitamine · Võtteks aluseks pöörlemise suuna positiivsed (a>0), negatiivsed (a<0) ja nullkraadised (a=0)
sin cos msin - cos - sin cos msin - cos ± sin cos tan 1 ± tan 1 - tan m m tan tan Eelnevaid valemeid kasutatakse tavaliselt teravnurga korral, kuid nad kehtivad ka suvalise nurga korral. 3.7 Trigonomeetria põhivalemid ja nende järeldused sin 2 + cos 2 = 1 tan cot = 1 sin 1 tan = 1 + tan 2 = cos cos 2 cos 1 cot = 1 + cot 2 = sin sin 2 3.8 Kahe nurga summa ja vahe trigonomeetrilised funktsioonid
cos msin cos sin cos tan 1 tan 1 tan m m tan tan Eelnevaid valemeid kasutatakse tavaliselt teravnurga korral, kuid nad kehtivad ka suvalise nurga korral. 3.7 Trigonomeetria põhivalemid ja nende järeldused sin 2 cos 2 1 tan cot 1 sin 1 tan 1 tan 2 cos cos 2 cos 1 cot 1 cot 2 sin sin 2 3
+ ai2Ai2 + ... + ainAin (arendis i-nda rea järgi) ja mis tahes veerunumbri j korral kehtib D = (1<=i<=n)aijAij = a1jA1j + a2jA2j + ... + anjAnj (arendis j-nda veeru järgi), kus Aij = (-1)i+j Mij ja Mij on determinant, mis tekib determinandist i-nda rea ja j-nda veeru kõrvaldamisel 8. Kui determinandi mingis reas või veerus on kõik arvud nullid, siis determinandi väärtus võrdub nulliga 9. Determinantide teooria põhivalemid. Ruutmaatriksi A = ||a ij|| Rnxn determinandi |A| = D mis tahes reanumbrite i ja k korral kehtib võrdus a i1Ak1 + ai2Ak2 + ... + ainAkn = iAk = (1<=j<=n)aijAkj = D, kui i=k ja 0, kui ik, kus Akj on determinandi D elemendi akj alamdeterminant. Analoogiliselt mis tahes veerunumbrite j ja k korral a1jA1k + a2iA2k + ... + aniAnk = jBk = (1<=j<=n)aijAik = D, kui j=k ja 0, kui jk 10. kui A ja B on ühte ja sama järku ruutmaatriksid, siis nende maatriksite
täiendite korrutiste summaga: (1) ning (2) Märkus. Avaldist (1) nimetatakse determinandi detA arendiseks i-nda rea järgi, avaldist (2) determinandi detA arendiseks j-nda veeru järgi. Tõestus. Tõestame valemi (2). 8. Determinantide teooria põhivalemid Olgu A ruutmaatriks, mille järk on n. Eelmise paragrahvi teoreemi põhjal arendades determinandi i-nda rea järgi, saame: (1) Siin rea i elemeid korrutatakse sama rea elementide alamdeterminantidega. Vaatleme, mis aga juhtub, kui korrutame mingi teise rea alamdeterminantidega. Lause. Determinandi mingi rea (veeru) elementide korrutiste summa mingi teise rea
konstandile C kõikvimalikud reaalarvulised väärtused. Igal pideval funktsioonil leidub algfunktsioon. Selgitada funktsiooni määramata integraali mõistet: Avaldist F (x)+C, kus F on funktsiooni f : D → R mingi algfunktsioon ja C on suvaline konstant, nimetatakse funktsiooni f määramata integraaliks intervallis D ja märgitakse ∫ f (x) dx. Teisisõnu, ∫ f (x) dx = F (x) + C, kus F′ (x) = f (x) iga x ∈ D puhul. Integreerimise põhivalemid: 32. Integreerimisreeglid (*) Tõestada integreeruvate funktsioonide f ja g summa f + g ja kordse λf integreerimise reeglid (lause 8.1 ja 8.2): Kui intervallis D määratud funktsioonidel f ja g eksisteerivad selles intervallis määramata integraalid ∫f (x) dx ning ∫ g (x) dx, siis eksisteerib ka määramata integraal ∫ (f (x) + g (x)) dx ja kehtib seos Eeldatavasti eksisteerivad ∫f (x) dx = F (x)+C1 ning ∫g (x) dx = G(x)+C2, mistõttu
Vedeliku liikumist nim. voolamiseks ja seda uurib hüdrodünaamika. Kui hüdrostaatika valemite tuletamisel lähtusime eeldusest, et tihedus on konstantne (ei sõltu rõhust), siis nüüd peame tegema veel ühe lihtsustava eelduse. Selleks on takistuseta voolavus e. sisehõõrdejõudude puudumine. Mis jõud need on ja millest sõltuvad, sellest edaspidi. Takistuseta voolavat mittekokkusurutavat vedelikku nim. ideaalseks vedelikuks ning tema abil tuletatakse hüdrodünaamika põhivalemid. Üleminek reaalsetele vedelikele tehakse hiljem vastavate parandusliikmete sisseviimisega. Kujutame lihtsuse mõttes torus voolavat vedelikku. Voolamiskiirust saame määrata kahel viisil: · märgistades mõne vedelikuosakese ning mõõtes selle kiirust nagu tahkete kehade korral; · mõõtes torust välja voolava vedeliku hulka. Reaalse vedeliku korral on osakeste kiirused torus erinevad ning seetõttu kõlbab voolukiiruseks vaid teine variant
Samal ajal on ka ilmselge, et majanduslike ja sotsiaalsete nähtuste üldised arengutendentsid ei ole pikemate ajaperioodide suhtes kuigi püsivad. 84 Matemaatika ja statistika 2008/2009 Kasutatud kirjandus 1. Aarma, A., Lutsoja, K. (2005) Statistika ülesannete kogu: põhivalemid, näidisülesanded, ülesanded, vastused. Tallinn: TTÜ Kirjastus. 105 lk. 2. Aasma, A., Kallam, H., Levin, A. (2005) Majandusmatemaatika alused. Tallinn: Ilo. 336 lk. 3. Afanasjev, J. (2001) Majandusmatemaatika elemendid. Tallinn: Avita. 96 lk. 4. Jurevits, N. (2004) Rakendusstatistika. Tallinn: Ilo. 143 lk. 5. Jürimäe, E., Velsker, K. (2001) Koolimatemaatika käsiraamat. Tallinn: Koolibri. 311 lk. 6. Keres, K., Levin, A. (2006) Matemaatiline statistika: ülesannete kogu
tulla ,,hall mull" ehk tossupilv ning komponent pole pärast seda enam kasutatav. Takistuseks nimetatakse juhtmeotstel ehk klemmidel oleva pinge (surve, voltides) ning takistit läbiva voolu (elektronide voog, amprites) suhet. Mida suurem takistus, seda vähem läheb sama pinge juures takistist voolu läbi. Takistil soojusena eralduv võimsus (wattides) leitakse takisti klemmidele pandud pinge ning takistit läbiva voolu korrutisena. Põhivalemid siis: U/I=R U*I=N N I= Kui veidi avaldada, siis leiab sealt, et R . Ehk siis teadaoleva lubatud maksimumvõimsuse ja takistuse põhjal on võimalik leida takistit läbi suurim lubatud vool. Takisteid saab omavahel kombineerida. Tüüpilised ühendused on järjestikku (jadamisi) ja rööbiti (paralleelselt). Jadamisi ühendades on arvutuskäik lihtne takistuste komplekti
võimsus, mille ületamisel võib takistist välja tulla ,,hall mull" ehk tossupilv ning komponent pole pärast seda enam kasutatav. Takistuseks nimetatakse juhtmeotstel ehk klemmidel oleva pinge (surve, voltides) ning takistit läbiva voolu (elektronide voog, amprites) suhet. Mida suurem takistus, seda vähem läheb sama pinge juures takistist voolu läbi. Takistil soojusena eralduv võimsus (wattides) leitakse takisti klemmidele pandud pinge ning takistit läbiva voolu korrutisena. Põhivalemid siis: U/I=R U*I=N N I= Kui veidi avaldada, siis leiab sealt, et R . Ehk siis teadaoleva lubatud maksimumvõimsuse ja takistuse põhjal on võimalik leida takistit läbi suurim lubatud vool. Takisteid saab omavahel kombineerida. Tüüpilised ühendused on järjestikku (jadamisi) ja rööbiti (paralleelselt). Jadamisi ühendades on arvutuskäik lihtne takistuste komplekti kogutakistus on