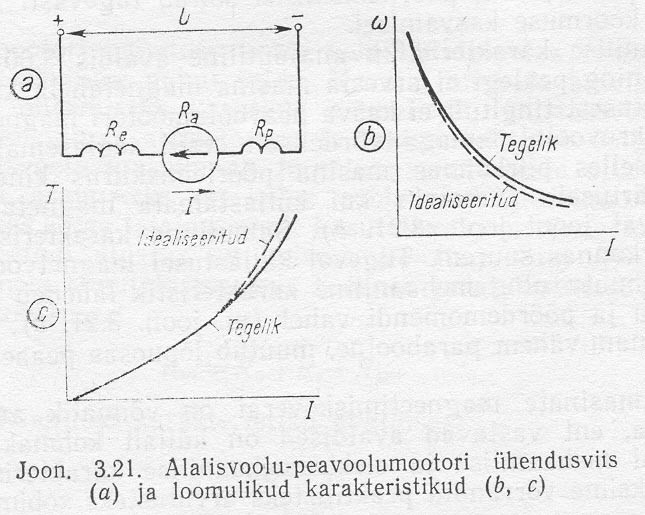
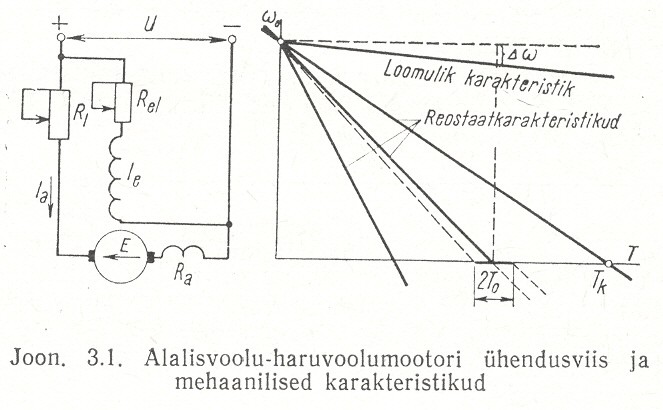
Sellesse rühma võib arvata mootorid, mille kiirus tühijooksust nimikoormuseni ei muutu rohkem kui 8...10% võrra, näiteks asünkroonmootor normaalse töö piirkonnas, samuti haruvoolumootor töötamisel normaalreziimis, ilma lisatakistuseta anksuahelas. Pehme karakteristik, mille puhul kiirus sõltub tugevasti koormusest. Sellist karakteristikutüüpi nimetatakse ka peavoolukarakteristikus, sest vaadeldava rühma mootorite tuntuimaks edisndajaks on alalisvoolu-peavoolumootor. 8. Mootorite elektrilise pidurduse meetodid 1. Rekuperatiivpidurdus, mille puhul ajami mootor töötab generaatorireziimis, andes energiat tagasi võrku. 2. elektrodünaamiline e. Dünaamiline pidurdus, mille juures mootor töötab samuti generaatorina, kuid energia neeldub reostaadis ja mootori mähistes ja hajub soojusena. 3. vastulülitus- e
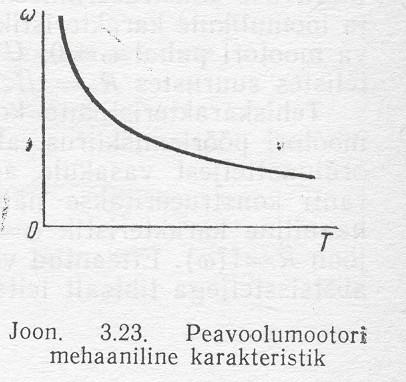
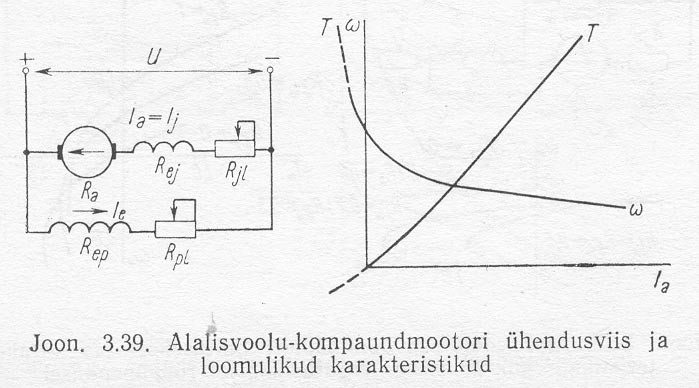
väiksemal koormusel kui 25% nimikoormusest võib toimuda puruksjooks. Ei tohi mootorid käivitada kui koormus võllil ei ole suurem kui 25%. Töökindluse huvides peab võll olema jäigalt ühendatud töömehhanismiga. Rihm ülekanne pole lubatud mahaviskumisel võib puruks joosta. Mehaanilised karakteristikud (joonis 6.11) Järsult langevad kõverad tagavad stabiilse töö mistahes mehaanilisel koormusel. Nende mootorite omadusel arendada suurt pöördemomenti, mis on võrdeline koormusvoolu ruuduga, on suur tähtsus eriti rasketel käivitamistel ja ülekoormusel, sest järkjärgulisel mootori koormuse suurenemisel kasvab tarbitav võimsus aeglasemalt kui pöördemoment.Kasutatakse peamiselt veomootorites transpolrdis ja kraana- mootoritena tõsteseadmetes. Segaergutusega alalisvoolumootor On kaks ergutusmähist rööp- ja jadamähis. Pöörlemiskiirus arvutatakse valemiga:
Sisukord Sünkroonmasinad .................................................................................................................................... 2 Põhimõisted......................................................................................................................................... 2 Töötamispõhimõte .............................................................................................................................. 3 Konstruktsioon .................................................................................................................................... 4 Staatorimähised .................................................................................................................................. 6 1 ja 2- faasilised staatorimähised ........................................................................................................ 9 Elektromotoorjõud .......................................................
[1]. Kaasaegne tehnoloogia võimaldab kasutada teatud materjalide omadusi jõu rakendamiseks, mida kutsub esile deformatsioon magnetvälja või soojuse rakendamisel. Vaatleme nüüd lühidalt igat täiturmehhanismide gruppi. Elektrilisteks täituriteks on erinevad elektriga juhitavad lülitid, näiteks dioodid, transistorid, türistorid jne. Neid juhitakse juhtseadme poolt väikese võimsusega elektriliste signaalidega ning kasutatakse mootorite, ventiilide, soojendite jm sisse- ja väljalülitamiseks Elektromehaanilised täiturid muundavad elektrilise energia mehaaniliseks. Sellisteks täituriteks on erinevad elektrimootorid, millest tuleb pikemalt juttu järgnevates punktides. Elektromagnetilisteks täituriteks on solenoidid ja elektromagnetid, milles on ära kasutatud elektri magnetilised omadused. Solenoid koosneb ferromagnetilisest materjalist südamikust, millele on peale mähitud mähis
Elektr iajamite eksam Elektriajamite liigitus töömasinat käitavate mootorite hulga järgi · Elektriajam muundab elektrienergia mehaaniliseks energiaks ja võimaldab seadmete elektrilist juhtimist. · Üldjuhul koosneb elektriajam: muundurist, mootorist, ülekandest ja juhtimissüsteemist. Elektriajami eelised võrreldes teiste ajamitega tulenevad peamiselt elektrimootori eelistest. 1. Elektriajam on lihtne ja töökindel 2. Elektriajam on odav ja kompaktne. 3. Elektriajami käivitamine on lihtne 4
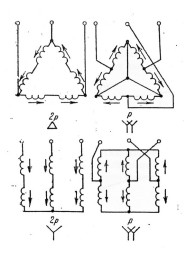
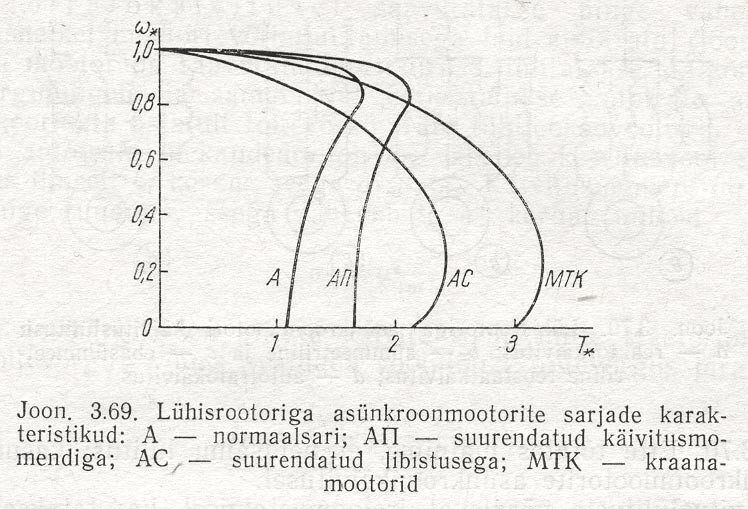
Sageduse sujuv muutmine on aga võimalik 28.Rööpergutusmootori nurkkiiruse reguleerimine- rootori pöörlemissagedus n on pöördvõrdeline sagedusmuunduri abil, mis teeb seadme kalliks. On õigustatud ainult siis kui üheaegselt on vaja muuta suure magnetvooga . Viimane sõltub ergutusvoolust Ie, mida saab reguleerida reostaadiga re .Seega on re grupi mootorite pöörlemiskiirust. *Lühisrootoriga as.mootorite pöörlemiskiiruse astmeline muutmine on mootori kiiruse regulaatoriks, võimaldades kiirust lihtsalt reguleerida küllaltki suures piires, kuni 1:8. võimalik poolusepaaride arvu muutmise teel, mis osutub võimalikuks staatormähise sektsioonide vastava 29.Jadaergutusmootori nurkkiiruse reguleerimine- mootori pöörlemissagedus ümberlülitamisega.
1. Unipolaarne mootor 4.2. Bipolaarne mootor 4.3 .Lainetalitus 4.4 .Samm-mootori koormamine 5. Kasutusalad 1.Elektrimootor Elektrimootor on seade, mida kasutatakse elektrienergia muundamiseks mehaaniliseks tööks.Enamik elektrimootoreid töötab tänu elektromagnetisminähtusele. Kuid on ka mootoreid millede töö baseerub teistel elektromehaanilistel nähtustel nagu näiteks piesoelektrilisel efektil ja elektrostaatilistel jõududel. Elektromagnetisminähtusel põhinevate mootorite tööpõhimõtteks on pöörleva magnetvälja energia muutmine rootori pöörlemise mehaaniliseks energiaks. Selliste mootorite töö on kirjeldatav Lorentzi seadusega. Kuid eksisteerivad ka lineaarsed elektrimootorid. Vooluliigi järgi jagatakse elektrimasinaid: · alalisvoolumasinad · vahelduvvoolumasinad, o mis omakorda jagunevad: o asünkroonmasinad o sünkroonmasinad 1.1. Asünkroonmootor on vahelduvvoolu jõul töötav elektrimootor, mille
8. Elektrimasinad 8.1 Elektrimasina tööpõhimõte Energia muundamiseks magnetvälja vahendusel kasutatakse elektrimasinat. Mehaanilist energiat muundatakse elektrienergiaks elektrigeneraatoris. Generaator pannakse pöörlema enamasti mitteelektrilise jõumasinaga, näiteks auru- hüdro- või gaasiturbiiniga, sisepõlemis- või diiselmootoriga. Selle jõu mõjul tekib magnetväljas liikuvas juhis elektrivool. Elektrienergia muundatakse mehaaniliseks energiaks elektrimootoris. Mootori tööpõhimõte on vastupidine: magnetväljas asuvale vooluga juhtmele mõjub jõud, mis paneb selle juhtme liikuma. Mootor paneb tööle tööpingi, mehhanismi või masina. Elektrimasinaid liigitatakse vooluliigi järgi · alalisvoolumasinad · vahelduvvoolumasinad viimaseid omakorda tööpõhimõtte järgi · asünkroonmasinad · sünkroonmasinad On veel palju teisigi elektrimasina tüüpe. Masinaosade koostöö ja energia muundamine toimub magnetvälja kaudu






































Kõik kommentaarid