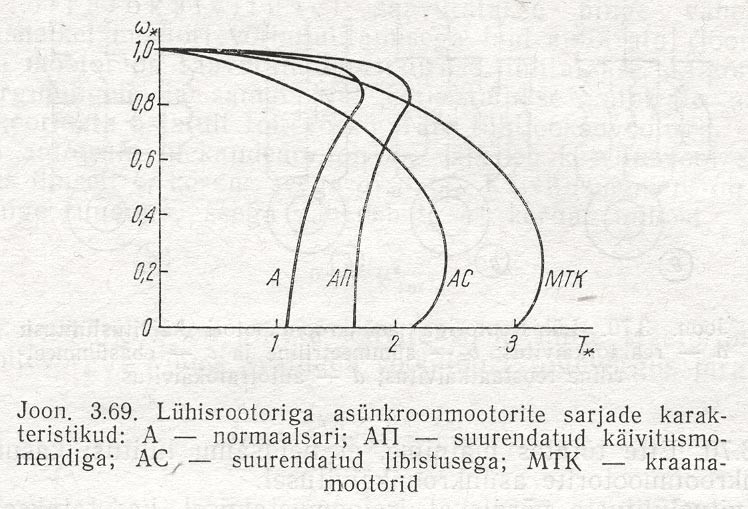
KOOL eriala Õpilase nimi MOOTORITE VÕRDLUS Iseseisev töö Juhendaja: ..... Tartu 2017 1 VAHELDUVVOOLUMOOTORI TÜÜPID Eelised Puudused Tavalised Kasutatav rakendused toide Lühisrootoriga - Otsekäivitus - Suurem Leiab järjest Vahelduvvool asünkroonmooto - Lihtne meetod ja käivitusvool enam kasutust. r ehitus u (kuni 8x Tööstusseadmete - Ei vaja keerukaid suurem ajamid, võimsad juhtimissüsteeme nimivoolust) pumbad, tõste- ja - Madal hind - Tegelik teisaldusseadmed - Töökindel vooluimpulss , - Rasketes kuni 14x turbogeneraatorid talitusoludes suurem (elektrijaamas
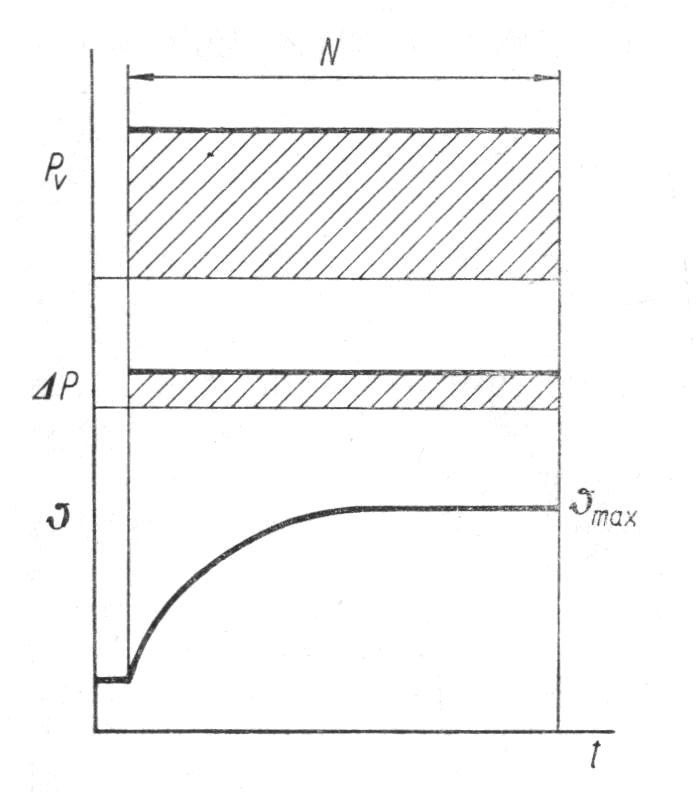
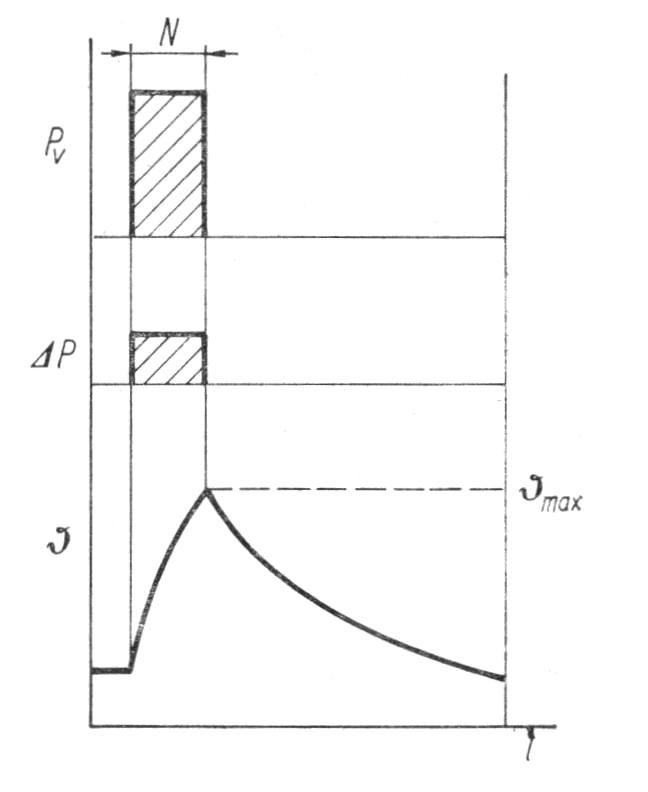
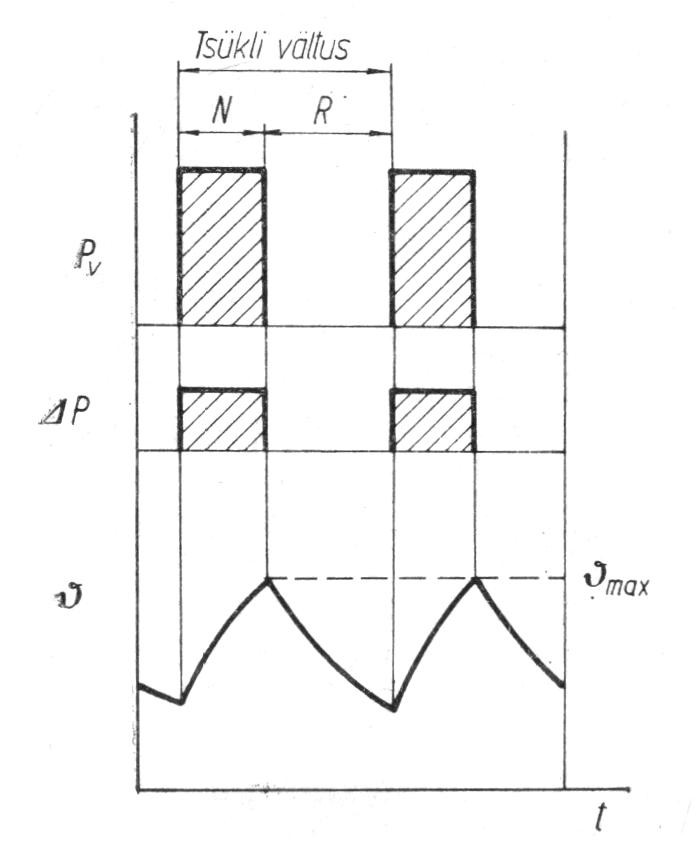
alalisvoolu mootorist lihtsam ja odavam. Transistoride kõrval kasutatakse välja lülitatavaid või enda muutuvkaod suuremad püsivkadudest. Sellepärast selline mootor töötab madalama kasuteguriga lühiajalises kustutusega türistore. Inverterite ja sagedusmuundurite juhtimiseks kasutatakse digitaal- ja vektorjuhtimist. talitluses, võrreldes kestva talitlusega. Lühiajalises talitluses on seepärast otstarbekas kasutada 32. Elektriajami dünaamika põhivõrrand. Elektriajami kiirenduse ja aeglustuse tingimustes võivad erimootoreid, mitte aga kestva talitluse mootoreid. Lühiajalise töö tegelik kestus ei lange alati kokku elektrimootoris ja töömasinas tekkida dünaamilised jõud ja momendid, mis on mitmekordselt suuremad standardse töötamiskestusega. Sel juhul arvutatakse tegelikud kaod ümber kataloogis antud mootori staatilistest väärtustest
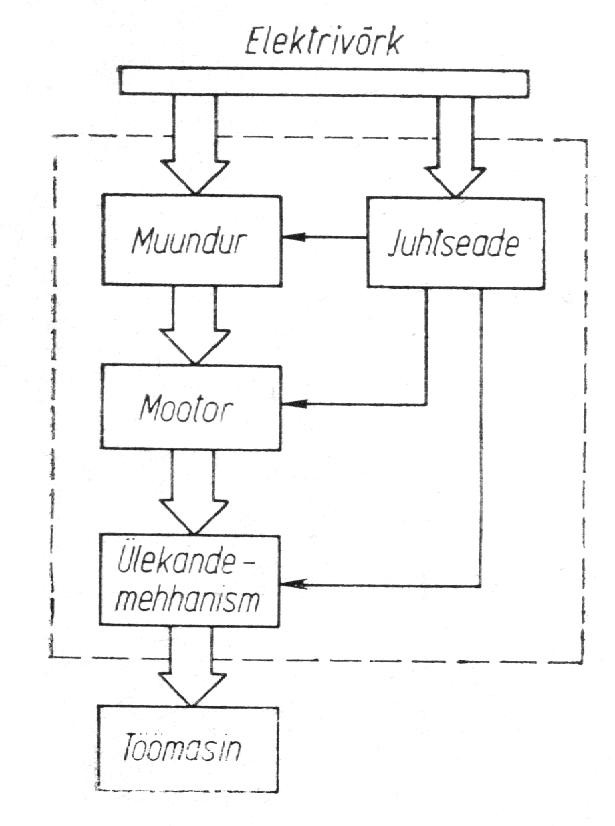
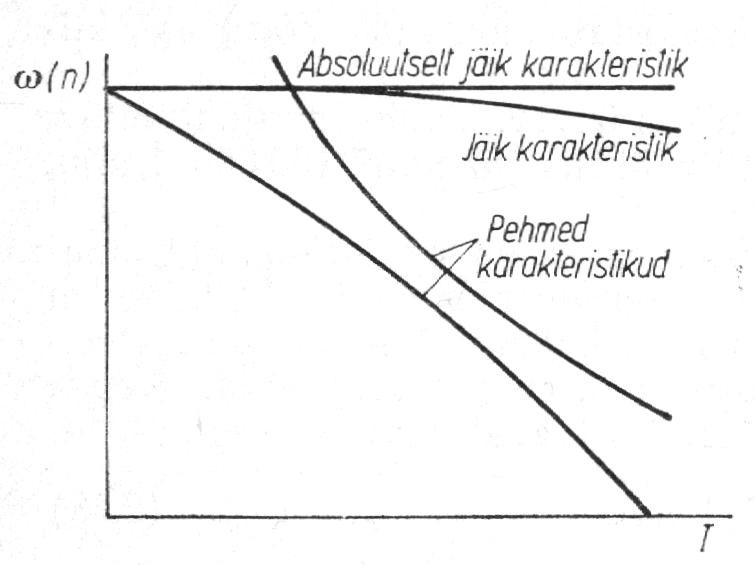
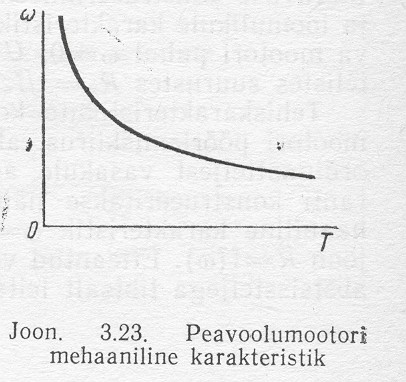
6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi-
Elektr iajamite eksam Elektriajamite liigitus töömasinat käitavate mootorite hulga järgi · Elektriajam muundab elektrienergia mehaaniliseks energiaks ja võimaldab seadmete elektrilist juhtimist. · Üldjuhul koosneb elektriajam: muundurist, mootorist, ülekandest ja juhtimissüsteemist. Elektriajami eelised võrreldes teiste ajamitega tulenevad peamiselt elektrimootori eelistest. 1. Elektriajam on lihtne ja töökindel 2. Elektriajam on odav ja kompaktne. 3. Elektriajami käivitamine on lihtne 4. Elektriajami kiirus on reguleeritav suurtes piirides ja suhteliselt lihtsate vahenditega. Kiiruse hoidmine teatud tasemel ei nõua eriregulaatoreid. 5. Elektriajam ei saasta keskkonda. 6
SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................5 Sümbolid ......................................................................
.................................................................................... 10 2.4. Näide ................................................................................................................................. 11 2.5. Täiturmehhanismide valikukriteeriumid ........................................................................... 11 3. Üldprintsiibid...................................................................................................................... 13 3.1. Elektriajami mõiste ........................................................................................................... 13 3.2. Alalisvool .......................................................................................................................... 13 3.3. Vahelduvvool .................................................................................................................... 15 3.4. Mittelineaarsed elemendid vahelduvvooluahelas ..................................................
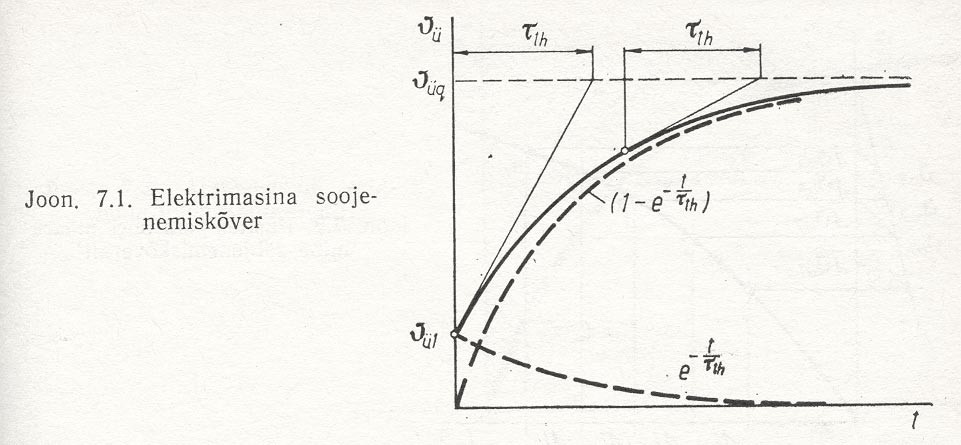
Reaktiivenergiat Wr, juhul kui koormus on sümmeetriline, saab määrata kahe ühefaasilise arvesti abil. Energia Wr leidmiseks tuleb arvestite näitude vahe korrutada 3. 10. Elektrimasina mõiste, teetähiseid ajaloost, areng. Seadmeid, mis on määratud mehhaanilise energia muundamiseks elektrienergiaks või vastupidi nim. ele ktrimasinateks. Kuni XIX sajandi lõpuni valitses tööstuses ajamimootorina aurumasin, mille kõrvale ilmus sajandi lõpus auruturbiin. Elektriajam sai alguse esimestest elektrimootoritest. 1834. a. konstrueeris M. H. Jacobi kasutuskõlbliku alalisvoolumootori, mida ta hiljem kasutas Neeval paadimootorina. Tööstuselektriajamite arengus sai määravaks kolmefaasilise asünkroonmootori loomine 1889. a. M. O. Dolivo-Dobrovolski poolt. Tööstuselektriajamite arengus oli oluliseks tähiseks üksikajami kasutuselevõtt 20-ndail aastail, mille tulemusena
raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik siit ka õppe- vahendi konspektiivne iseloom. Seega on õpilastel vajalik aktiivselt osaleda tundides ja soovitavalt ka konspekteerida õppejõu täiendavaid selgitusi. Ja loomulikult ei sisalda õppevahend sellist materjali või on see esitatud väga napilt, mida on võimalik


































Kõik kommentaarid