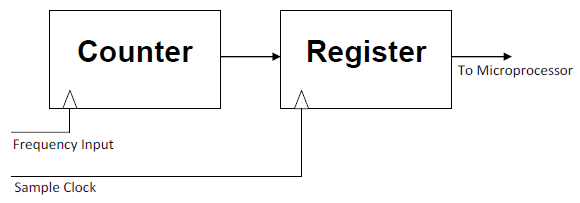
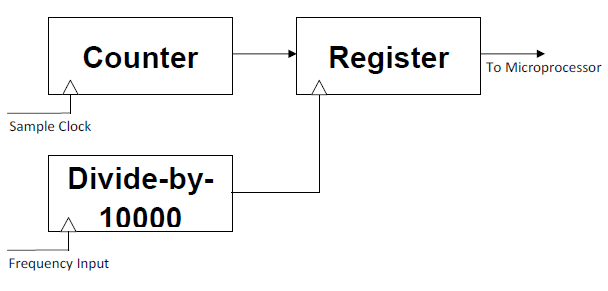
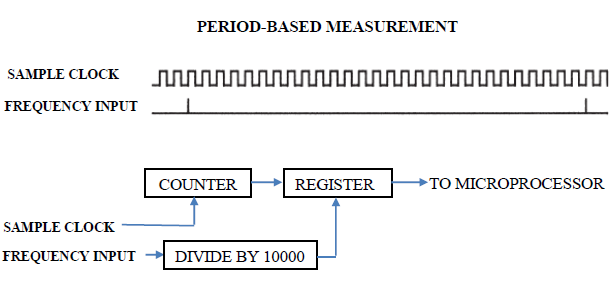
Read Chapter_4_Time_Based_Measurements.pdf Question 1 When converting an analogue value to a frequency, consider the following diagram describing the system. The frequency changes from 20 MHz to 18 MHz and the system samples at an interval of 2ms. How many counts does the microprocessor detect at, 2ms a) 20 MHz? =40000 counts 50 ns 2ms b) 18 MHz? =36 000 counts 55,55 ns What is the difference in terms of number of counts detected by the microprocessor? Between 20MHz and 18MHz are 4000 counts. Question 2 Consider the following diagram The frequency changes from 20 MHz to 18 MHz and the system samples at an interval of 100ns. a) What is the difference in terms of number of counts detected by the microprocessor? 10 MHz 10 MHz =5000 =5555,555 2000 Hz 1800 Hz Between 20MHz and 18MHz are 555,555 counts. b)
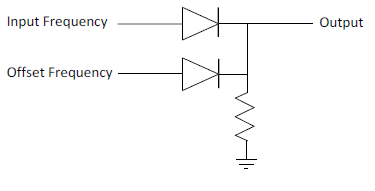
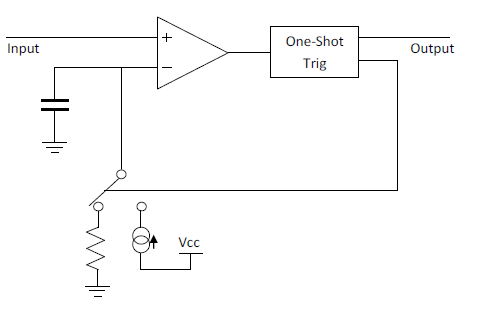
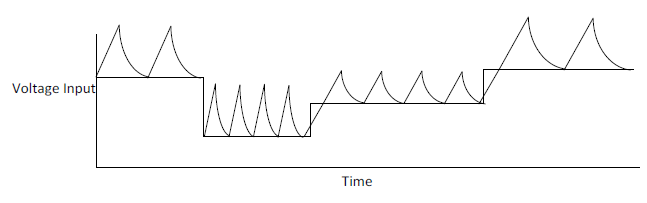
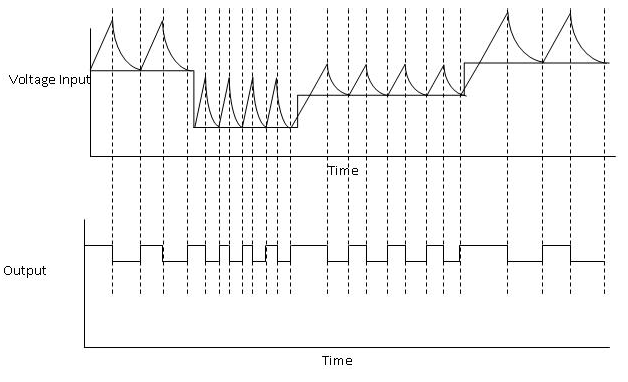
Microcontroller homework for week 07 1. A) 40000 counts B) 36000 counts The difference between 20MHz and 18MHz is 4000 counts. 2. A) 555,555 counts more B) Higher resolution is caused by increased sampling rate. 3. A) Because the mixer needs additional components B) The mixer approach multiplies the frequency shift you want to measure, but also any other frequency shift. This includes drift caused by component heating, noise, etc. 4. The output waveform according to input: 5. A) 100 Hz B) 500 Hz C) 1 kHz 6. In an electrical system, a ground loop usually refers to a current, almost always unwanted,
Analog Interfacing to Embedded Microprocessors Real World Design Analog Interfacing to Embedded Microprocessors Real World Design Stuart Ball Boston Oxford Auckland Johannesburg Melbourne New Delhi Newnes is an imprint of Butterworth–Heinemann. Copyright © 2001 by Butterworth–Heinemann A member of the Reed Elsevier group All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. Recognizing the importance of preserving what has been written, Butterworth–Heinemann prints its books on acid-free paper whenever possible. Library of Congress Cataloging-in-Publication Data Ball, Stuart R., 1956– Analog interfacing to embedded microprocessors : real world design / Stuart Ball. p. cm. ISBN 0-7506-7339-7 (pbk. : alk. paper) 1. Embedded computer
Mictrocontroller Week 03 Numbering systems 1. Convert the decimal number 123.456 to the following formats, taking whole numbers and fractions into account. Show calculations. a) binary b) hexadecimal c) base-5 d) BCD === 1. a) 0111 1011.0111 01002 b) 7B.7416 c) 443.2125 d) 0001 0010 0011.0100 0101 01102 === 2. Extend the following unsigned 8-bit binary numbers to their 16-bit equivalents and convert the result to hexadecimal. a) 011010112 b) 101101012 === 2. a) 006B b) 00B5 === 3. Extend the following signed two’s complement 8-bit binary numbers to their 16-bit equivalents and convert the result to hexadecimal. a) 011010112 b) 101101012 === 3. a) 006B b) FFB5 === Logic and arithmetic 4. Using two’s complement arithmetic, calculate the following (choose a suitable number of bits for the representation): a) 121 – 185 b) -70 – 88 == 4. Convert back to verify answer == 5. Calculate the following without converting the number base. Show calculations.
Ticket No1 1)The characteristic is called output characteristic or volt-ampere charateristic of a Rectifier Diode. 2)Rectifier Diode. 3) A is called Anode and C is called Cathode. An Anode has positive potential and therefore collects electrons in the device. Cathode has negative potential and therefore emits electrons to anode. The symbol looks like an arrow that ponts from the anode to the cathode, and reminds that conventional current flows easily from the p side(anode) to the n side(cathode). BIASING. Forward biasing. If the current in a diode is too large, excessive heat will destroy the device. Even approaching the burnout current value without reaching it can shorten its life. Therefore manufacturer's data sheet specifies the maximum forward current, that diode can withstand. This average current IF is the rate a diode can handle up to the forward direction when used as a rectifier. Another entry of interest in the da
Mictrocontroller Week 03 Numbering systems 1. Convert the decimal number 123.456 to the following formats, taking whole numbers and fractions into account. Show calculations. a) Binary Fractional part : Reading direction Integral part: Reading direction 0,456 x 2 = 0,912 0 123 / 2 = 61 1 0,912 x 2 = 1,812 1 61 / 2 = 30 1 0,812 x2 = 1,624 1 30 / 2 = 15 0 0,624 x 2 = 1,248 1 15 / 2 = 7 1 0,248 x 2 = 0,496 0 7/2=3 1 0,496 x 2 = 0,992 1 3/2=1 1 0 1 1 0 0 So 123.45610 = 0111 1011.0111 01002 b) Hexadecimal Fractional part :
Question 1 Name 9 characteristic parameters of sensors. Solution: 1. Thershold. 2. Sensitivity. 3. Full Range. 4. Linearity. 5. Accuracy. 6. Precision. 7. Stability. 8. Hysteresis. 9. Noise. Question 2 Given the circuit below (using a SYH-2R humidity sensor) determine the output voltage for a relative humidity of 70 % at 30 °C if RT = 50 kΩ and VDD= 2.5 V. Solution: Check specification for Humidity Sensor of SYH-2R.pdf at: http://www.rhopointcomponents.com/images/SYH-2R.pdf 2 Week 04 Homework - Solutions Check Thermistor - Wikipedia.pdf at http://en.wikipedia.org/wiki/Thermistor Calculate the Humidity Sensor resistance at 30°C T = 273.15°C +30°C = 303.15°C T0 = 273.15°C +25°C = 298.15°C R60% 30°C =25.5858 kΩ - Matlab code: 33*exp(4600*(1/303.15-1/298.15)) = 25.5858 Calculate the Humidity Sensor resistance at relative humidity 70% See the above graphic for the standard resistance: Exercises - Solutions
Question 1 Define the following ADC terms: 1. SNR – (Signal to Noise Ratio) SNR is a calculated value that represents the ratio of RMS signal to RMS noise. 2. SINAD - (signal-to-noise-and-distortion ratio) Ratio of the RMS signal amplitude to the mean value of the root-sum-square (RSS) 3. ENOB – (effective number of bits) The effective number-of-bits and relates to SINAD 4. THD - (total harmonic distortion) Ratio of the rms value of the fundamental signal to the mean value of the RSS of its harmonics. 5. SFDR - (spurious free dynamic range) Ratio of the RMS value of the signal to the RMS value of the worst spurious signal. 6. Channels - related to the inputs of the ADC can either be multiplexed or individually selected. 7. Linearity - relates to how a ADC follows a linear function. All ADCs are to a certain extend nonlinearity. 8. Operating temperature - measurement, which i

























Kõik kommentaarid