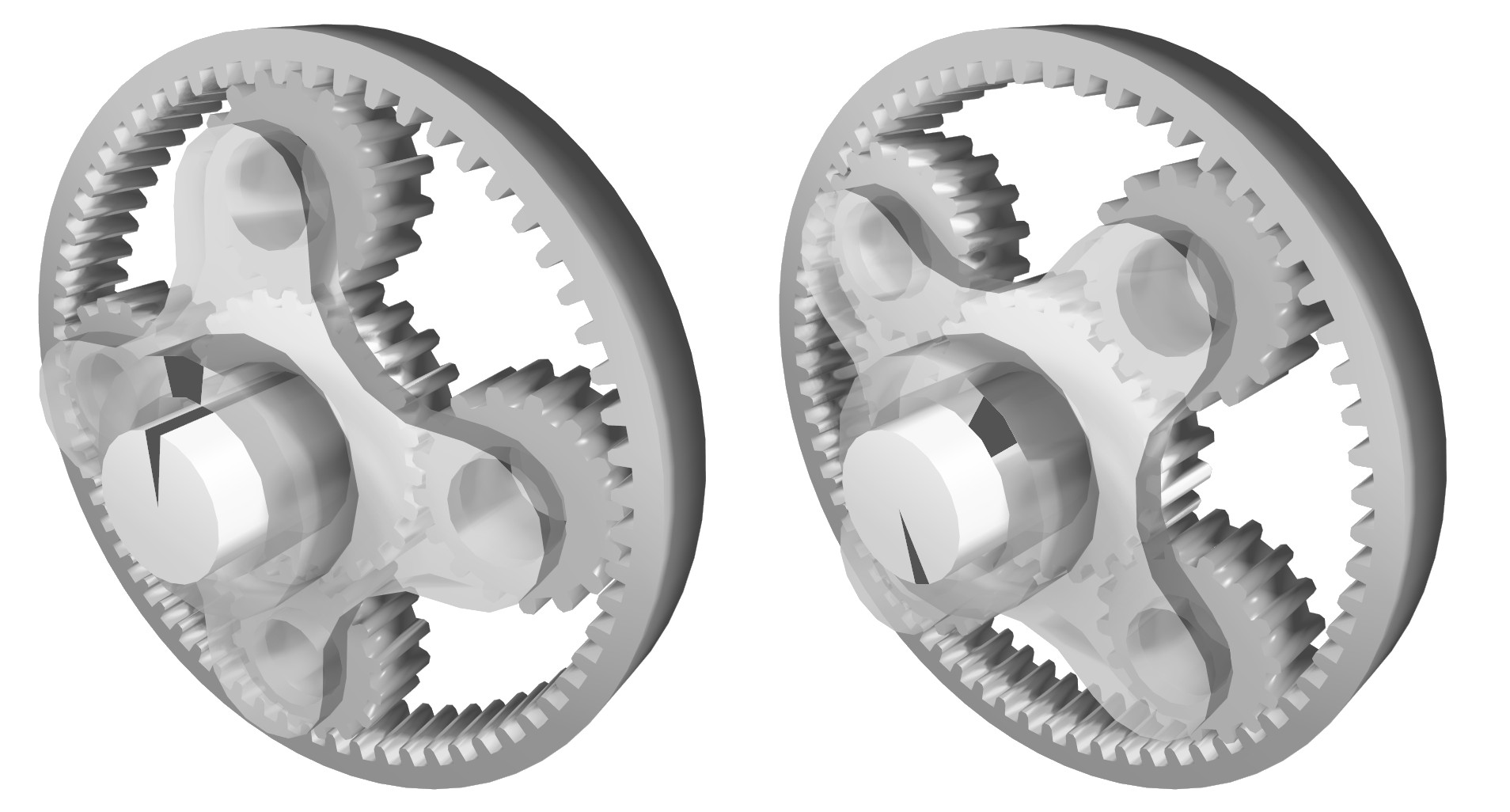
suure pöörete arvuga ja temaga ühendamiseks on vaja vahele asetada pöördeid alandav hammasülekanne ehk reduktor. Seetõttu tekib vajadus pöörlemiskiiruse mutest iseloomustamiseks mingi konkreetse parameetriga. Selleks on ülekandetegur ehk ülekandesuhe. Joonis 1. Hammasülekanne 1.3 Diferentsiaal 1.3.1 Planetaarülekanne Planetaarülekandeks nimetatakse hammasülekannet, kus on liikuvate telgedega hammasrattaid. Planetaarülekanded koosnevad välis- ja sisehambumisega hammasratastest. Planetaarülekandes on keskratas välishambumises satelliitidega, mis pöörlevad raami paigutatud telgedel, kusjuures ka raam ise pöörleb. Teisest küljest on satelliidid sisehambumises liikumatu hammasrattaga ning pöörlevad koos raamiga ümber keskratta. Vedav lüli Vedavaks lüliks võib planetaarülekandes olla kas keskratas või siis raam. See võimaldab ülekande ühe ja sama skeemi juures saada erinevaid ülekandearve. Lihtsaimal
3. PLANETAARREDUKTOR Planetaarreduktor on automaatkäigukasti mehaaniline osa, mille kaudu muudetakse auto vedavatele ratastele antavat pöördemomenti. Planetaarreduktor paikneb automaatkäigukasti keres ja koosneb järgmistest osadest: 1) planetaarülekanded, mille kaudu muudetaksegi pöördemomenti (tavaliselt on neid planetaarreduktoris kaks või kolm); 2) sidurid, mille kaudu antakse pöördemoment edasi planetaarülekande üksikutele osadele; 3) pidurid, mille abil saab planetaarülekande üksikuid osasid kinni hoida; 4) vabajooksusidurid, mis võimaldavad planetaarülekande mõnel osal pöörelda ainult ühes suunas. 3.1. Planetaarülekanne Planetaarülekande eelisteks tavalise hammasülekande ees on suurema
· ringjoonelise profiiliga konstruktiivse kujunduse järgi · lahtised hammasülekanded · kinnised hammasülekanded ringkiiruse järgi · väga aeglasekäigulisteks ( ringkiirus alla 0,5 m/s ) · aeglasekäigulisteks ( ringkiirus 0,5-3 m/s ) · keskkäigulisteks ( ringkiirus 3-15 m/s ) · kiirekäigulisteks ( ringkiirus üle 15 m/s ) 5.1 Planetaarülekanne Planetaarülekandeks nimetatakse hammasülekannet, kus on liikuvate telgedega hammasrattaid. Planetaarülekanded koosnevad välis- ja sisehambumisega hammasratastest. Planetaarülekandes on keskratas välishambumises satelliitidega, mis pöörlevad raami paigutatud telgedel, kusjuures ka raam ise pöörleb. Teisest küljest on satelliidid sisehambumises liikumatu hammasrattaga ning pöörlevad koos raamiga ümber keskratta. Planetaarülekande astmete- ja ülekandearv Planetaarülekanded võivad olla ühe- ja mitmeastmelised ülekandearvuga kuni 1000 ja rohkem. Planetaarülekanne
TÖÖ NR.1 Kontaktor magnetkäiviti kontaktorkaitselüliti on madalapingelistes jõuahelates kasutatav elektromagnetiline komminukatsiooniseade. madalpinge -1000v jõuahel 3 faasi elektromagnetiline magnet mille omadused tulevad juhitavast elektrivoolust. Lülitussagedus kontaktorite lülitusagedus võib olla kuni mõni tuhat korda tunnis,nimivool mõni A kuni mõni mA. Kontaktorite kasutamine elektriajamite, võimsate valgusseadmete jms. Automaat ja distantsjuhtimiseks Türistokontaktor tingilikult nimetatakse kontaktoreiks ka mõningaid lülitusreziimis töötavaid elektroseadmeid (türistorkontaktor) Kontaktori lülitused kontaktid on mõeldud miljonitekas lülitusteks ja mitmekümneteks lülitusteks minutis. Kontaktori kontaktid kahte liiki tugevad peakontaktid on seadme peavooluringide (tugevvoolu)sisse ja välja lülitamiseks abikontaktid on juhtimis ja signalisatsiooniahelate tarbeks. Peakontaktide arvu järgi tehakse vahet ühe, kahe, kolme, neljapooluseliste kontaktide vahe
1 Sisukord: Autode jõuülekanded 4 Üldandmed 4 Jõuülekannete otstarve ja tüübid 4 Ülekande tüübid: 5 Mehaanilised jõuülekanded 8 Sidur 11 Üldandmed 11 Mehaaniline ajam 13 Hüdrauliline ajam 13 Sidurite tüüpskeeme 15 Väändevõnkesummutid 17 Mehaanilise või hüdroajamiga lamellsidurid 18 Mehaanilise ajami ja pneumo- või hüdrovõimendiga sidurid 24 Käigukastid, jaotuskastid ja käiguaeglustid 26 Üldandmed
Loengukonspekt õppeaines MASINAMEHAANIKA Koostanud prof. T.Pappel Mehhatroonikainstituut Tallinn 2006 2 SISUKORD SISSEJUHATUS 1. ptk. MEHHANISMIDE STRUKTUURITEOORIA 1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid. Liigliikuvused 1.2.1. Vabadusaste 1.2.2. Liigseondid. Liigliikuvused. 1.3. Mehhanismide struktuuri sünteesimine 1.3.1. Struktuurigrupid 1.3.2. Kõrgpaaride arvestamine 1.3.3. Kinemaatiline skeem. Struktuuriskeem 2. ptk. MEHHANISMIDE KINEMAATILINE ANALÜÜS 2.1. Eesmärk. Algmõisted 2.2. Mehhanismide kinemaatika analüütilised meetodid
AUTOD-TRAKTORID I KORDAMIKÜSIMUSED 2013/2014.Õ.-A. 1. Sisepõlemismootorite tüübid Sisepõlemismootorid jagunevad: I. Kolbmootor , kogu tööprotsess toimub mootori silindris; II. Turbiinmootor, pidevatoimeline mootor, mis muundab mehaaniliseks tööks voolava auru, gaasi või vee kineetilist energiat (töötav aine voolab läbi düüside või juhtaparaadi tööratta kõverpinnalistele labadele ja paneb viimase pöörlema. 2. Sisepõlemismootorite liigid Turbiinmootorid jaotuvad: -1 1) auruturbiinmootorid (alates mõni kW... 1200 MW ja rohkem, n = 30 000 min ): e aktiivturbiinid, b) reaktiivturbiinid (töötava aine töö = voolsuuna muutumine + paisumise reaktiivjõud, mille osatähtsus on üle 50%) ; 2) gaasiturbiinmootorid ( võivad tar
MASINATEHNIKA MHE0061. EKSAMIKÜSIMUSED. 1. Mis on sideme- e. toereaktsioon? Sidemereaktsiooniks (toereaktsiooniks) nimetatakse jõudu, millega side takistab keha liikumist. 2. Milliste parameetritega iseloomustatakse jõudu? Jõud on vektoriaalne suurus, teda iseloomustatakse arvväärtuse, rakenduspunkti ja suunaga. 3. Tasapinnaline jõusüsteem ja selle tasakaalustamiseks vajalikud tingimused. Tasapinnaliseks jõusüsteemiks nimetatakse jõusüsteemi, mille jõud asetsevad ühes tasapinnas. Ühes punktis lõikuvate mõjusirgetega jõudude süsteemi nimetatakse koonduvaks jõusüsteemiks. Kui kehale mõjub mitu jõudu siis võib alati leida nende jõudude resultandi. 1.Tasapinnalise jõusüsteemi tasakaaluks on vajalik ja piisav, et kõikide jõudude projektsioonide algebralised summad kahel koordinaatteljel ja kõikide jõudude momentide algebraline summa suvalise punkti suhtes võrduksid nulliga. 2. Tasapinnalise jõusüsteemi tasakaaluks on vajalik ja piisav, et kõikide jõudude

























Ei ole nii hea kui väiks olla!
Kõik kommentaarid