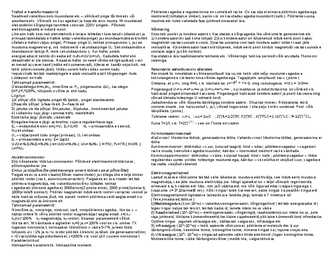
Suletud reguleersüsteem, struktuur, skeemi elemendid ja tööpõhimõte: Automaatreguleerimissüsteem (ARS) on seadmete kompleks, mis koosneb töömasinast ning reast abiseadmeist, mis on ette nähtud töömasina juhtimiseks. Abiseadmed moodustavad automaatregulaatori. Reguleerimist iseloomustab pidev kontroll reguleeritava suuruse üle. Kontrolli teostadakse tagasiside abil. Sektoriteks jagatud ringikestaga 2 tähistadakse signaalide liitmist. Valgesse sektorisse saabuv signaal loetakse positiivseks, musta sektorisse saabuv signaal negatiivseks. 1) Seadur annab välja võrdlussuuruse X0, millega määratakse vajalik reguleeritava suuruse väärtus 2) võrdleb seadurist X0 ja andurist y tulevaid signaale ning tekitab vajadusel veasignaali x= X0-y 3) ülesandeks on anda X0-ga samasuguse füüsikalise iseloomuga signaal y, mis on reguleeritava parameetriga võrdeline 4) muunduri ülesandeks on vajaduse...
Suletud reguleerimissüsteemi struktuurskeem ja tööpõhimõte. P Programmseade (nukkvõll, tiftidega ketas, perfolint või arvutimälu). Annab ette sätte y0(t). A - Andur muundab väljundsignaali ülekandmiseks ja võrdlemiseks sobivaks suuruseks. VE - VõrdlusElemendi väljundis tekib vea signaal (). V Võimendi võimendab veasignaali. TM Võimendi väljundsignaal mõjub TäituvMehhanismile, mille kaudu regulaator mõjutab Reguleerivat Elementi. RE Reguleeriv Element mõjutab Objekti, muutes sellelel antavalt ainet või energia hulka. Tagasiside. Tagasiside on väljundi mõju sisendile. Positiivse tagasiside korral on sisendisse tagasi antav signaal sisendsignaaliga samas faasis ja seega tugevdab üldist sisendsignaali. Negatiivse tagasiside signaal on sisendsignaaliga vastasfaasis ja seega nõrgendab üldis...
Automaatika alused 1. Põhimõisted 1.1 Milles seisneb automaatjuhtimine? Automaatika on teaduse ja tehnika haru, mis tegeleb automaatseadmete ning automatiseeritavate tehniliste protsesside kontrollimise ja juhtimise meetodite ja vahenditega. Definitsiooni kohaselt on automaatikal kaks põhiharu: automaatkontroll ja automaatjuhtimine. 1.2 Milles seisneb süsteemi orienteeritus? Süsteemi orientatsioon e suunatoime väljendub süsteemi signaalipaaride vastastikuse toime olulises ebasümmeetrias, millel põhinebki süsteemi sisendsignaali (edaspidi sisend) ja väljundsignaali (edaspidi väljund) eristamine. Sisend mõjutab väljundit, viimase tagasimõju sisendile aga puudub (on reaalses süsteemis tühine). Orientatsioon on tarvilik igasuguse informatsiooni ülekandmisel. 1.3 Mis iseloomustab süsteemi sisendit? Sisend on süstee-mist sõltumatu ja peab süsteemi analüüsil olema teada. 1.4 Mis iseloomustab süsteemi väljundit? Väljund on orienteeritud sü...
Võnkering Teooria: Võnkering Koosneb kondensaatorist ja poolist. Kasutatakse elektromagnet lainete tekitamiseks ja raadio vastuvõtjates. Elektromagnetvõnkumiste periood võnkeringis Leitakse Thomsoni valemiga. Maksimaalne voolutugevus Kondensaator on tühi. Võnkumiste sumbumine Kondensaatori elektrivälja energia muutub voolu magnetvälja energiaks ja vastupidi. Toimub tänu takistile. Valemid: Kondensaatori energia Wp=C*U2/2 Pooli energia Wm=L*I2/2 Periood võnkeringis T=2L*C Sagedus võnkeringis F=1/T L*w=1/C*w Transformaator Teooria: Transformaator Seade vahelduvpinge ja voolutugevuse muutmiseks konstantsel sagedusel. Koosneb vähemalt kahest juhtmepoolist ehk mähisest, mis on keritud ühtsele raudplekilehtedest koostatud südamele. Lehed on pöörisvoolu vältimiseks. Kasutatakse auto süütepoolis ning elekrienerg...
TALLINNA POLÜTEHNIKUM Päevane osakond ELEKTRIMOOTORI KIIRUSE AUTOMAATREGULEERIMISE SÜSTEEM Kursusetöö Õppeaine automaatreguleerimine Juhendaja: V. Purro Konsultant: V. Purro Tallinn 2010 2 Sisukord KURSUSETÖÖ ÜLESANNE..............................................................................................3 KURSUSETÖÖ ANDMED................................................................................................. 4 Sissejuhatus.......................................................................................................................... 6 2. SÜSTEEMI FUNK...
Tallinna Polütehnikum Raadiovastuvõtjad konspekt Raadiovastuvõtjad Kirjandus 1. A, Isotamm “Raadiovastuvõtuseadmed”, 1968 2. “Raadioamatööri käsiraamat 3. L, Abo “Raadiolülitused” Raadioülekandeks kasutatavad sagedusalad Raadiosagedusliku spektri jaotus Sagedusala Sagedusala Laineala Laineala nimetus Tähis ulatus nimetus ulatus 3...30 kHz Väga madalad 100...10 km Ülipikklained ÜPL raadiosagedused 30...300 kHz Madalad 10...1 km Pikklained PL raadiosagedused 300...3000kHz Keskmised 1000....100 m Kesklained KL raadiosagedused 3...30 MHz Kõrged 100...10 m Lühilained LL raadiosagedused 30...300 MHz ...
Trafod e transformaatorid Pöörlemissageduse reguleerimine on suhteliselt raske. On kasutusel erineva pöörlmissagedusega Seadmed vahelduvvoolu muundamiseks põhiliselt pinge tõstmiseks või mootoreid (lülitatakse ümber), parim viis on kasutada sagedusmuundurit (kallis). Pöörlemissuuna alandamiseks. Võimalik on ka sagedust ja baaside arvu muuta. Nt muudavad muutmiseks tuleb vahetada faasijuhtmed omavahel ära. ülekandeliini kõrgepinge tarvititele sobivaks 220V pingeks. Põhineb elektromagnetilisel induktsioonil. Võnkering Lihtsaim trafo koosneb eletrotehnilise terase lehtedest koostatud südamikust ja Koosneb poolist ja kondensaatorist. Kasutatakse kõrgsageduslike võnkumiste genereerimiseks. primaar(rakendatakse trafole antav vahelduvpinge) ja sekundaarmähisest(millelt 1) kondensaatorid saab kohe...
VIII ELEKTROMAGNETVÕNKUMISED. ELEKTROMAGNETLAINED. 1. Elektromagnetvõnkumised a) Mõiste: emv-ks nimetatakse laengu, voolutugevuse ja pinge perioodilist muutumist Elektromagnetvõnkumised jagunevad: Vabad elektromagnetvõnkumised Sunnitud magnetvõnkumised b) Võnkering süsteem, milles toimuvad vabad emv. Koosneb poolist ja kondensaatorist. Võnkeringi joonis. C kondensaatori mahtuvus L pooli induktiivsus c) Thomsoni valem - saab arvutada võnkumiste perioodi võnkeringis. T= T- võnkumiste periood [s] ; L- induktiivsus [H] ; C- mahtuvus [F] d) Vahelduvvool sunnitud emv, mille puhul voolutugevus muutub ajas harmooniliselt. Vahelduvvoolu tekitakse generaatorite abil. Generaatori põhiosad: Magnetväljas pöörlev juhtme keerd indutseeritakse emj Püsimagnet tekit...
Elektroonika Loengute materjalid: skeemid, diagrammid, teesid. 1 Sisukord 1. Elektroonika ajaloost (arengu etapid, elektroonika osad, elektronlambid, elektronkiiretoru, elektronseadmete montaazi tüübid)............................................................................................... 3 2. Elektroonika passiivsed komponendid.......................................................................................... 14 3. Pooljuhtseadised (dioodid, bipolaartransistorid, väljatransistorid, türistorid)............................... 23 4. Optoelektroonika elemendid, infoesitusseadmed.......................................................................... 42 5. Analoogelektroonika lülitused....................................................................................................... ...
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID. 3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded, ideaalkarakteristikud. Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks, edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar, takistustermomeetri andur). Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem. Andurid liigitatakse füüsikalise tööpõhimõtte järgi: 1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid, takistusandurid; 2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.; 3. mehaanilised, kasutavad tahkete kehade liikumist; 4. hüdraulilised, kasutavad vedelike mehaan...
[vaata | 1. Füüsikaliste suuruste mõisted, definitsioonid ja ühikud muuda] Voolu töö ja võimsus. Joule-Lenzi seadus. Potentsiaal ja pinge. Elektriväli, suund ja tugevus. Voolu tugevus ja tihedus. Takistus, selle sõltuvus juhi mõõtmetest. Eritakistus. Laeng ja mahtuvus. Induktiivsus. Vooliuallika elektromotoorjõud, lühisvool ja sisetakistus. Voolu töö ja võimsus. Voolu töö on võrdeline voolutugevusega I, pingega U juhi otstel ja ajaga t. [ J ] Võimsus on ajaühikus tehtud töö. [ W ] A p= t Joule-Lenzi seadus. Joule-Lenzi seadus : elektrivoolu toimel juhis eralduv soojushulk Q on võrdeline voolutugevuse I ruuduga, juhi takistusega R ja voolu kestusega t ning ku...
Pilet 1. 1. Valgusdioodid 2. Võimendi põhiparameetid 3. RC-generaator (Wien i sild + OV) 4. TTL-Schottky loogika elemendid 5. RS-triger 1.Valgusdiood on päripingestatud pn-siirdega pooljuhtseadis, milles siire kiirgab valgus laengukandjate rekombinatsiooni tõttu. Vooluläbimisel pn- siiret, osa elektrone muudavad energiat, vahetavad orbiite, vabaneb energiat ning vabanev energia kiiratakse valgusena. n: infrapunane. Algul vaid peen valgus praegu olemas kollane, sinine, roheline. Pinge umbes 2V. valmistatakse (gallium arseeniid fosfiid). Kasutatakse optronites (valgusallik+valguse vastuvõtja). Dioodoptron kiireim 10 -8s. Inertsivaba ja saab ise valida spektri. 2. Võimendus astme põhiparameetrid: Ku=Uvalj/Usis, Ki=Ivalj/Isis, KP=Pvalj/Psis=Ku*Ki. Võimendi puhul KP alati >>1 OV: *Võimendustegur: KUD, K. Sõltub differentspinge sagedused, toiteping, temp. Antakse nullsagedusel ja nimiting-stel K=500..500k *Ühissignaali nõrgendusteg...
Soojusautomaatika eksamiküsimuste vastused 1. Põhimõisted automatiseeritud tootmise alalt. Automaatikasüsteemide klassifikatsioon nende otstarbe järgi. Näited. Automatiseeritud tootmise põhimõisted: 1. Objekt 2. Regulaator 1. Andur 2. Tajur 3. Automaatikasüsteem Automaatikasüsteemide klassifikatsioon otstarbe järgi: 1. Automaatreguleerimise süsteemid (ARS) 2. Distantsioonjuhtimise süsteemid (DJS) 3. Tehnoloogilise kaitse süsteemid 4. Automaatblokeeringu süsteemid (ABS) 5. Reservseadme automaatse käivitamise süsteem (RAKS) 6. Automaatsed tehnoloogilise kontrolli süsteemid (ATKS) 7. Signalisatsioonisüsteemid (SS) valgus ja helisüsteemid 1. Tehnoloogiline SS andmed seadmete töö ja üksikute parameetrite kohta 2. Avarii SS teatavad võimalikest avariilistest olukordadest ja juba tekkinud avariidest 3. tsentraalsed SS on ette nähtud signalisatsioonisüste...
ELEKTROONIKA 2003 KORDAMISKÜSIMUSED 1. ÜLDOSA....................................................................................................................1 1.1.Elektroonika ajaloo põhietapid.............................................................................1 1.2.Mis on elektronlamp.............................................................................................2 1.3.Elektronkiiretoru.................................................................................................. 2 1.4.Mis on võimendi...................................................................................................2 1.5.Analoog ja digitaalelektroonika erinevus..........................................................3 1.6.Elektroonika passiivkomponendid..........................................................................
Kontrolltöö nr.1D 1.Põhimõisted (defineeri): Andur. Tajur. Reguleeriv organ. Võimendi. Täitur. Andur on automaatsüsteemi osa, mis muundab kontrollitava füüsikalise suuruse (parameetri) teiseks suuruseks, mida on parem võimendada, mõõta või juhtimiseks kasutada. Tajur on välistoimele tundlik ning sellele vahetult reageeriv anduri osa Reguleeriv organ element, mis vahetult mõjub reguleerimisobjektile reguleeritava suuruse hoidmiseks nõutud tasemel. Võimendi on seade milles teostatakse sisendsignaali võimsuse suurendamine välise energiaallika abil. Täitur on regulaatori element, mis läbi anduri ja võimendi tulevale signaalile (korraldusele) reageeri. Selleks võib olla elektri-, hüdro-, või pneumomootor, solenoidventiil, kraan, siiber jne. 2. Automaatsüsteemide klassifikatsioon (defineeri): Automaatsignalisatsioonisüsteemid (ASS). Laeva automaatikaseadmed klassifitseeritakse: A. Otstarbe järgi: ...
Pilet 1. Pilet 3. 1. Valgusdioodid 1. türistori volt-amper karakteristik 2. Võimendi põhiparameetid 2. mis asi on nullinihepinge OV baasil? 3. RC-generaator (Wien i sild + OV) 3. T-triger 4. TTL-Schottky loogika elemendid 4. demutlipleksor 5. RS-triger 5. inverteeriv võimendaja (skeem, 1.Valgusdiood on päripingestatud pn-siirdega pooljuhtseadis, milles siire kiirgab valgus pingevõimendustegur) laengukandjate rekombinatsiooni tõttu. Vooluläbimisel pn-...
Tallinna Polütehnikum Energeetika õppesuund Rein Kask ELEKTRIAJAMITE JUHTIMINE Õppevahend TPT energeetika õppesuuna õpilastele Tallinn, 2007 Saateks Erialaainete õpikute ja muude õppevahendite krooniline puudus on juba palju aastaid raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik ...
Kondensaator C = Q/P ; [F] 1 - dielektrik 2 - metall plaat S U Pinge d- Film Capacitor (Kile kondendsaator) Isolatsiooni kile paksus 2-20 mikromeetrit, Parameeter Polüester Polükarbonaat Polüstüeer Mahtuvus 100pF - 22nF 100pF - 68µF 10pF 0,5µF Sagedus 1MHz 1MHz 10MHz Tolerants ±5-20% ±5-10% ±1-5% C pinge 1600V 400V 500V Elektrolüüt kondensaator a) Märjad ehk klassikalised elektrolüüt kondesaatorid b) Kuivad ehk tandaal elektrolüüt kondensaator 1. Kuivad elektrolüüt kondensaatorid Ta2O C=25 Induktiiv poolid Mahtuvuslik reaktiivtakistus Alalisvool ei lähe läbi. Takistus lõpmatu. Induktivsus [H] Henri Pooljuht seadised (semi-conducktor) Pooljuht kui m...
Tallinna Tehnikaülikool Keemia- ja materjalitehnoloogia teaduskond Keemiatehnikainstituut Ainetöö reaktsiooniprotsessidest Pöörduv reaktsioon membraanreaktoris Üliõpilane: Marija Gnatjuk Juhendaja: Enn Tali Kaitsud: Tallinn 2013 a. Sisukord Sisukord....................................................................................................................................... 2 1.Tähiste ja lühendite loetelu....................................................................................................... 3 2.Sissejuhatus............................................................................................................................. 4 2.1 Membraanreaktor.......................................................................................
Pilet 1. 1. Valgusdioodid Valgusdiood on pn-siirdega diood, mis muudab elektrienergiat optiliseks kiirguseks tavaliselt spektri nähtavas või infrapunases osas. Teatud ainete kristallis moodustatud pn-siirde päripingestamisel (pluss p-kihil) injekteeruvad augud n-kihti ning elektronid vastassuunas. Need injekteerunud augud ja elektronid rekombineeruvad pn-siirdes ja selle läheduses vastasmärgiliste laengukandjatega ning osa vabanevast energiast eraldub kiirgusena. Kuna p-kiht on kõigest mõne mikromeetri paksune, siis väljub kiirgus kristallist. Kiirguse värvuse määrab pooljuhtmaterjali koostis. Toodetakse ka kahevärvilise kiirgusega valgusdioode. Nendel on tavaliselt kaks eri materjalist siiret ja kolm viiku. Siirdeid läbivate voolude muutmise teel saab siis valida mitmeid värvivarjundeid, näiteks punase ja rohelise korral punakaskollasest kollakasroheliseni. Valgusdioode valmistatakse peamiselt galliumarseniid-fosfiidist. Valguse lainep...
Mehaanika. 1. Elastsusjõud. Hooke seadus Elastsusjõud esineb kehade deformeerimisel ja on vastassuunaline deformeeriva jõuga. Hooke'i seadus: Väikestel deformatsioonidel on elastsusjõud võrdeline keha deformatsiooniga. F e = -k l k-jäikus l-keha pikenemine 2. Raskuskese on punkt, mida läbib keha osakestele mõjuvate raskusjõudude resultandi mõjusirge keha igasuguse asendi korral Punktmass on keha, mille mõõtmeid antud liikumistingimustes ei tule arvestada. 3.Kulgliikumise korral liiguvad keha kõik punktid ühtemoodi (läbivad sama aja jooksul sama teepikkuse) 4. Nihe. Nihke ja lõppkiiruse võrrand. Nihe on suunatud sirglõik, mis ühendab keha algasukoha lõppasukohaga. x =Vot + at2/2; v=vo+at 5.Taustsüsteem koosneb taustkehast, koordinaatsüsteemist ja kellast. Keha kiirus on suhteline: keha kiirus sõltub selle taustsüsteemi valikust, mille suhtes kiirust mõõdetakse. Tavaliselt valitakse taustsüsteemiks maapind. 6. Hõõrdejõud- jõudu, mis tekib...
Teema 6. Analoogelektroonika lülitused M.Pikkovi ainekava ja konspekti järgsed allteemad (http://www.ttykk.edu.ee/aprogrammid/elektroonika_alused_MP.pdf, lk 60...85) - Transistor kui pidevatoimeline võimenduselement. - Võimendusaste üksiktransistoriga (bipolaartransistor ühise emitteriga ja väljatransistor ühise lättega lülituses). - Tööpunkt (ehk reziim) ja staatiline ning dünaamiline koormussirge. - Astmete aseskeemid. - Pingevõimendustegur ja sisendtakistus. - Järgurid, nende pingevõimendustegur ja sisendtakistus. - Ühise baasiga aste. - Astmetevaheline sidestus mitmeastmelises võimendis. - Tagasiside võimendites. - Tagasiside tüübi mõju võimendi põhiparameetritele. - Bipolaartransistori töö lülitireziimis. - Stabiilse voolu generaatorid. Käesoleva teksti sisujaotus: 6.1 Võimendid: mõiste, liigitus ja põhiparameetrid 6.2 Võimendusastmed bipolaartransistori baasil 6.2.1 ÜE-lülituses transistor 6.2.2 ÜK-lülituses trans...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi ...
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaa...
Rakenduselektroonika 1. Võimendid 1.1. Võimendite liigid ja neid iseloomustavad parameetrid Võimendiks nimetatakse seadet mille abil toimub signaali amplituudi suurendamine võimalikult väikeste signaali kuju moonutustega. E + Usis Võimendi Uvälj Joon.1.1 Võimendil on alati kaks sisend-, kaks väljundklemmi ja temaga peab olema ühendatud alati energiaallikaks olev alalispinge allikas (joon.1.1). Sisendklemmidega ühendatakse signaaliallikas mille signaal vajab võimendamist. Väljundklemmidega aga ühendatakse see tarbija, millele antakse võimendatud signaal, milleks võib olla kas valjuhääldi, mingi relee mähis, mingi täiturmehhanismi juhtmähis jne. Nimetatud objektid on elektriliselt vaadeldavad takistustena ja seepärast me räägime üldistatult võimendi koormu...
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teor...
Skeemitehnika. SS-98. 1. M.Tooley “Everyday electronics data book” 2. Hessin “Impulsstehnika” 3. Horowits “The art of electronics” Skeemitehnika põhilised mõõtühikud Nimetus Tähistus Sümbol Kirjeldus Amper A I Voolutugevus juhtmes on 1A, kui juhtme ristlõiget läbib elektrilaeng 1 kulon 1. sekundi jooksul Kulon C Q Elektrilise laengu ühik e. Elektrihulk Farad F C Mahtuvus on 1F, kui potensiaalide vahe 1V tekitab mahtuvuse elektroodidel laengu. Henry H L Induktiivsus on 1H, kui voolumuutus kiirusega 1A sekundis tekitab induktiivsusel pinge 1V. Jaul J E Energiaühik. Oom R Takistuseühik. Siemens S G Juhtivuseühik. Sekund s...
Elektrotehnika kordamisküsimused: 1. Milliseid eeliseid annab elektrotehnika tundmine insenerile? See annab oskusi muundada looduslikku energiat ning oskusi saada ja edastada elektrilist informatsiooni. Elektrotehnilised seadmed annavad võimaluse tootmist kompleksselt automatiseerida ning võtta kasutusele tehnoloogiaid, mille rakendamine näiteks kõrge temperatuuri, rõhu või ohtliku kiirguse tõttu oleks muidu võimatu. Elektronarvutite abil saab töödelda ning salvestada informatsiooni. Elekter on meie igapäevaelu vältimatu osa. 2. Milliseid eeliseid annab elektroonika tundmine insenerile? Elektroonika tundmine annab oskuse käsitleda keskmise ning suure võimsusega seadmeid, mille ülesandeks on ühe vooluliigi muundamine teiseks. Neid muundussüsteeme kasutatakse värviliste metallide elektrolüüsil, elektertranspordis, tõstemasinates, elektriajamites ning energia alalisvoolu ülekandel suurtele kaugustele. 3. Kes peaks olema õppimi...
3.VASTUVÕTJA INFORMATIIVNE TRAKT- Informatiivse trakti struktuur sõltub: projekteerimise lähteandmetest (mida on eelnevalt teada signaalist, müradest), optimaalsuskriteeriumitest. kirjanduses on palju tuntud optimaalseid lahendusi teatud tüüpsituatsioonide kohta. Samas on need tüüpsituatsioonid suhteliselt lihtsad ning ei pruugi tegelike vajadustega kokku langeda. sellegipoolest taandub informatiivse trakti optimaalse projekteerimise lähtelahendused suurel määral lihtsustatud optimaalsete tüüpstruktuuride leidmisele. Informatsioonitraktis lahendatakse klassikalisi signaalitöötluse ülesandeid, milledeks on mürade, häirete taustal oleva signaali:Demodulatsioon (detekteerimine);Regeneratsioon (signaali taastamine tavaliselt impulss-kood modulatsiooni korral; Otsimine (sageduse, amplituudi, modulatsiooni liigi, faasi järgi); Avastamine; Sünkronisatsioon (sageduse, faasi, kandevlaine viiteaja, alamkandesageduse, taktsageduse, koodi järjest...
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................
1.Alalisvooluringi seadused.Voouring koosneb: 1) toiteallikas; 2) tarbija e koormus: 3) ühendusjuhtmed. Faasirootoriga asünkr. Lühisrootoriga, kahe- ja ühefaasilised asünkroonmootorid. Graafilist kujutist nim skeemiks. Vooluring kus vool on ühe ja sama väärtuseks nim haruks. 3 või enama haru Asünkroonmootori ehitus: staator(koosneb välisest teraskerest, millesse on pressitud uuretega kalvaanilist ühenduskohta nim sõlmeks. Kui pinge ja vooluvaheline sõltuvus on lineaarne siis nim staatorisüdamik, mis koostatakse stantsitud terasplekist), rootor(koosneb terasplekkidest on mähitud) lineaarseteks vooluringiks. Suletud vooluringis eksisteerib vool kui eksisteerib potentsiaalide vahe e pinge 19. Asünkroonmootori tööpõhimõte- Töö põhineb pöördmagnetvälja ja rootori voolu vastastikusel toimel. alikate klemmidel. Vool kulgeb vooluringis alati kõrgemalt madalamale potensiaalile. Tarbijate koormust ...
Kordamisküsimused 1. Mis on Ohmi seadus? U=R*I 2. Mis on pingejagur? Etteantud parameetritega pingejaguri arvutamine. Pingejagur – alalis- või vahelduvpinget osadeks jagav elektriseade. 3. Elektriahela võimsus. U2 2 P=U∗I = =I ∗R R 4. Edissoni efekti olemus? 5. Elektronlambid (diood, triood, tetrood …) ja nende tööpõhimõte? diood ‒ kahe elektroodiga (katood, anood); triood ‒ kolme elektroodiga (katood, võre, anood); pentood ‒ viie elektroodiga (katood, tüürvõre, varivõre, sulgvõre, anood). Tetrood – nelja kanaliga Dioodi tööpõhimõte Töötamisel lastakse vool läbi nikroomist hõõgniidi, mis kuumutab katoodi 800...1000 °C kraadini. Kuum katood eraldab elektrone vaakumisse, protsess, mida nimetatakse termoemissiooniks. Katood on kaetud leelismuldmetalli (nt.baarium või strontsium) oksiidiga, millest elektronid väljuvad suhteliselt kerg...
ELEKTROONIKA ALUSED Elektroonikaseadmete koostaja erialale 2007 SISUKORD 1. POOLJUHTIDE OMADUSI............................................................................................................................................3 1.1.Üldist..........................................................................................................................................................................3 1.2. Elektrijuhtivus pooljuhtides......................................................................................................................................3 1.3.P-N-siire ja tema alaldav toime (The P-N Junction) .................................................................................................6 1.4. P-N siirde omaduste sõltuvus temperatuurist (Temperature Effects) ......................................................................8 1.5. P-N-siirde omaduste sõl...
ELEKTROONIKA ALUSED Elektroonikaseadmete koostaja erialale 2007 SISUKORD ........................................................................................................................................... 24 I...................................................................................................................................... 25 U2.................................................................................................................................. 25 ........................................................................................................................................... 25 VD2................................................................................................................................ 25 ...
TALLINNA TEHNIKAÜLIKOOL ELEKTRIAJAMITE JA JÕUELEKTROONIKA INSTITUUT ROBOTITEHNIKA ÕPPETOOL MIKROPROTSESSORTEHNIKA TÕNU LEHTLA LEMBIT KULMAR Tallinn 1995 2 T Lehtla, L Kulmar. Mikroprotsessortehnika TTÜ Elektriajamite ja jõuelektroonika instituut. Tallinn, 1995. 141 lk Toimetanud Juhan Nurme Kujundanud Ann Gornischeff Autorid tänavad TTÜ arvutitehnika instituudi lektorit Toomas Konti ja sama instituudi dotsenti Vladimir Viiest raamatu käsikirjas tehtud paranduste ja täienduste eest. T Lehtla, L Kulmar, 1995 TTÜ elektriajamite ja jõuelektroonika instituut, 1995 Kopli 82, 10412 Tallinn Tel 620 3704, 620 3700. Faks 620 3701 ISBN 9985-69-006-0 TTÜ trükikoda. Koskla 2/9, Tallinn EE0109 Tel 552 106 3 Sisukord Saateks...
Telefoniside teeninduspiirkonna suhtes. Globaalne sidesusteem Kõige lihtsam sidesüsteemi näide ,koosneb kahest teenindab abonente uhest maailma otsast teise abonendist A ja B ,ning neid ühendavast võrgust. ,ning lokaalne sidesusteem teenindab abonente A ja B nimetatakse ka terminaliks ,millesse ainult sisestatavad andmed liiguvad labi võrgu punktist hoone raames. Naiteks jagunevad vorgud soltuvalt A punkti B. Juurdepääsuvõrk on võrk mis oma suurusest jargmistesse liikidesse. ühendab otseselt lõppkasutajaga ehk teenuse WAN (laivork) wide area network kasutajaga. Juurdepääsuvõrk on ühendatud MAN (regionaalvork) metropolitan area network magistraalvõrguga mis koosneb suuri keskjaamu LAN (kohtvork) local area network ühendavatest liinidest. CAN (linnakuvork) campus area network Juurdepääsuvõrk ja ühe...