Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Veeautomaat". Need materjalid aitavad sul teemat sügavamalt mõista.
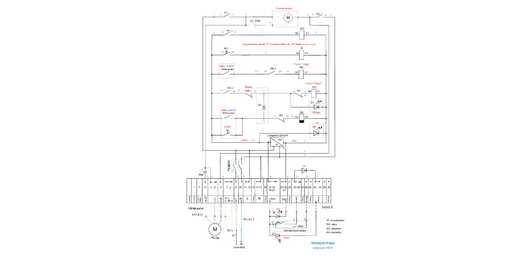
reserv, pump, relee, rõhuandur, normaal, kuival, reset, toiteplokk, kontaktmanomeeter, aegrelee, kontaktorRE1.3 6 14 11 7 A2 A1 8 ,,Impulssrelee asend: ,,I" Normaal reziiim ja ,, II" Avarii (pump kuival) AR1 IR 15 18 9 A2 A1
Arve_Number Klient Tootekood Toote nimetus AR20030320-1 Elektrikeskus AS RAAM00002 Abikontakt 1ns sisse, 140MN AR20030320-1 Elektrikeskus AS RAAM00004 Toiteklemmid, 140MC/D AR20030323-8 Suur Sadam OÜ RAAM00001 Mootorikaitselüliti 16-25A AR20030518-17 Power OY TRAN00001 Transport Schenker AR20030602-18 Power OY KILP00004 Summer 24V AC AR20030617-19 Hea Paber OÜ SAGM136091 Sagedusmuundur PowerFlex4 AR20030617-19 Hea Paber OÜ MUUD00001 Potentsiomeeter AR20030617-19 Hea Paber OÜ KILP00004 Summer 24V AC AR20030617-19 Hea Paber OÜ MUUD00002 Kontaktplokk AR20030701-20 Trend AS SUJK00001 Sujuvkäiviti AR20030701-20 Trend AS MUUD00004 Seadme paigaldustööd AR20030701-21 Pinge AS PROG00003 Häälestus AR200
vajutamisega, viimine lahteasendisse toimub nupu,.Reset,, vajuiamisega. Skeemi eripära on selles, et juhul kui nupp "Set" on rakendunud asendis, ei avalda nupu "Reset" vajutamine mingit toimet (vt. sele s). t2 Kl.1 Sele 8 - Mälu domineeriva "SET" funktsiooniga 3 .2.3 lvIälu domin eeriva "RESET" funktsiooniga Antud skeemis toimub relee üimine rakendunud olekusse nupu "Set" vajutamisegą Viimine lžįhteasendisse toimub nupu "Reset" vajuūmisega. Skeemi eripžira on selles, et juhul kui nupp "Reset" on rakendunud asendis, ei avalda nupu "Set" vajutamine mingit toimet (vt. Sele 9). Sele 9 _ Mįlu domineęriva "Reset" funktsiooniga t3 *įļį#ltilffi ĮĮrfi $.ņg#.m*ęffi ei Nįilde.
13 ~380V 17 18 19 20 6 L 1 Joonis 1.3 Toitesüsteem 1) pumbata vett pumbaga 16 paagist 1 paaki 23. Selleks avatakse pumba imemisavapoolne kraan 15 ja kraan 21. Oodatakse kuni õhk väljub pumbast ja torustikust ning käivitatakse pump. Pumba käivitamiseks tuleb ühendada sagedusmuundur 18 lüliti 20 abil vooluvõrku, vajutada nuppu "RUN" ning aeglaselt tõsta pumba tööratta pöörlemissagedust (voolu sagedust) kuni vesi voolab paagist 1 survepaaki 23. Üleliigne vesi survepaagis 23 peab ülevoolutorustiku 8 kaudu voolama paaki 1 ja veenivoo nivootorus 25 peab püsima muutumatuna. See saavutatakse muutes sagedusmuunduri 18 abil tsentrifugaalpumba
.................................................................................. 54 4.1.1 Ballastipump............................................................................................................ 54 4.1.2 Kuivendus-,tuletõrje- ja avari tuletõrjepupm .......................................................... 54 4.1.3 Hüdroforipump ........................................................................................................ 55 4.1.4 Sludge pump ............................................................................................................ 55 4.1.5 MDO; GO transfer pump ........................................................................................ 56 4.1.6 Pre- heating ME pump ............................................................................................ 56 4.1.7 Circulating pump warm water ................................................................................. 56 4
1. 1. N n . , m k . N = 20, n = 5, m = 4, k = 2. . . C nk C Nm--nk C 52 C152 5!15!4!16! 5 4 3 15 14 4 P ( A) = = = = = 0,217 . CN m C 204 2!3!2!13!20! 2 20 19 18 17 2. n , k . , m . n = 10, k = 4, m = 2. . . C km C 42 4!2!8! 43 2 P ( A) = m = 2 = = = = 0,133 . Cn C10 2!2!10! 10 9 15 3. . 15% , 25%, 30%. , ( ) . . : A1 ; A2 ; A3 . , ( ) P ( A) = P ( A1 A2 A3 + A1 A2 A3 + A1 A2 A3 ) = = P( A1 A2 A3 ) + P( A1 A2 A3 ) + P ( A1 A2 A3 ) = = P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) = = 0,85 0,75 0,3 +
DETERMINANDI MÕISTE. KAHEREALISE DETERMINANDI Avaldanud esimesest võrrandist x-i ja asendanud saadud tulemuse teise võr- KASUTAMINE VÕRRANDISÜSTEEMIDE LAHENDAMISEL randisse, saame c1 b1 y Paljude sisult erinevate probleemide lahendamine viib ühe ja sama seaduse a1 x b1 y c1 x , kui a1 0. järgi koostatud avaldisteni. Sel juhul on otstarbekas uurida nende avaldiste a1 üldisi omadusi. c b y° a2 ¡¡ 1 1 ±± b2 y c2 a1 korrutame võrrandi pooli a1-ga Üheks selliseks av
U V W N Q F1…F3 SP SK K Juhtnupp Sulavkaitse K2 K1 3~ M Kontaktor Relee Joonis 4.1. Asünkroonmootori lihtne käivitus-peatamislülitus ja selles kasutatavad komponendid Toitevõrkudes kasutatakse kolmefaasilise süsteemi puhul 5-juhilist juhistikusüsteemi, milles peale liinijuhtide L1, L2, L3 on kasutusel neutraaljuht N ja maandusjuht PE (protection earth). Tähtühenduse puhul ühendatakse neutraaljuht mõnikord tähe keskpunktiga (nt pingete sümmeetria tagamiseks). Maandusjuht ühendatakse inimeste ohutuse tagamiseks
SISUKORD 1. Laboritööde tegemise kord ja ohutustehnika................................................5 2. Laboritöö nr. 1...................................................................................6 Elektritakistuse mõõtmine............................................................................................6 3. Laboritöö nr. 2................................................................................. 7 Ohmi seaduse katseline kontrollimine (ahela osa kohta...............................................7 3. Laboritöö nr. 3...................................................................................8 Vooluallika emj. (allikapinge) ja sisetakistuse määramine..........................................8 5. Laboritöö nr. 4...................................................................................9 Kirchoffi II seaduse katseline kontrollimine.....................................
TALLINNA TEHNIKAÜLIKOOL EHITISTE PROJEKTEERIMISE INSTITUUT Kursuseprojekt aines EER 0012 RAUDBETOONKONSTRUKTSIOONID I - PROJEKT ÜLIÕPILANE: JUHENDAJA: TÖÖ ESITATUD: TÖÖ ARVESTATUD: Tallinn, 20.. Sisukord 1 Plaadi arvutus 3 1.1 Koormused plaadile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Talade m~ o~ otude valimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.3 Arvutuslikud avad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.4 Plaadi sissej~ oud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.5 Plaadi armatuuri dimensioneerimine . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.5.1 Esim
veepinna ja pumba imiava ristlõigete (I II) jaoks : z 0 + p0 /( g) + v0 2 /(2g) = z 1 + pi /( g) + vi 2 /(2g) + hti , kus - z0 on vedeliku asendienergia veepinnal , - p0 = põ õhurõhk veevõtukoha pinnal (1,03 kgf/ cm2), - v0 on vedeliku voo kiirus veepinnal , - z1= hi on vedeliku asendienergia imikavas (staatiline imemiskõrgus), - pi ja vi rõhk ja kiirus imiavas , - hti , rõhukadu takistustest imitorus 2 Oletame , et pump töötab teoreetiliselt ideaalsetes tingimustes: - z0 = 0 s.o. vedeliku potensiaalse energia asendienergia veepinnal on null - v0 = 0 , voolukiirus veepinnal on null - pi /( g) = 0 st. pump tekitab absoluutse vaakumi (rõhuenergia on null) - vedelik imiktorus liigub väga aeglaselt vi 2 / 2g = 0 , - imiktorus pole vedelikul takistust hti= 0, Siis z1 = hi = põ/(g) Ehk teoreetiliselt ideaalsetes tingimustes vedeliku imemiskõrgus võrduks keskkonna rõhu poolt tekitatud surve kõrgusega .
reguleerimiskruvid 52 ja 55. 6. Õhuballooni automaatsed läbipuhumisklapid. Ehitus ja tööpõhimõte. Õhuballoonide läbipuhumine teostatakse reeglina elektromagnetklappide abil (harva kasutatakse ka ujuktüüpi andureid) . Elektromagnetklappi juhib aegrelee, mis teatud, reguleeritava ajaperioodi järgi, annab toite elektrimagnetklapi solenoidile ja toimub läbipuhumine. Õhk ballooni läbipuhumismagistraalist juhitakse klapi korpuse 1 õõnsusesse A ja läbi võrkfiltri 14 ning drosseli 13 õõnsusesse B, milline on õõnsusest A eraldatud
13 M ~380V 17 18 19 20 6 L 1 Joonis 1.3 Toitesüsteem pumbata vett pumbaga 16 paagist 1 paaki 23. Selleks avatakse pumba imemisavapoolne kraan 15 ja kraan 21. Oodatakse kuni õhk väljub pumbast ja torustikust ning käivitatakse pump. Pumba käivitamiseks tuleb ühendada sagedusmuundur 18 lüliti 20 abil vooluvõrku, vajutada nuppu “RUN” ning aeglaselt tõsta pumba tööratta pöörlemissagedust (voolu sagedust) kuni vesi voolab paagist 1 survepaaki 23. Üleliigne vesi survepaagis 23 peab ülevoolutorustiku 8 kaudu voolama paaki 1 ja veenivoo nivootorus 25 peab püsima muutumatuna. See saavutatakse muutes sagedusmuunduri 18 abil tsentrifugaalpumba tööratta pöörlemissagedust. 1.2.2. Katsetorustik
1 10. klass Viljandi Täiskasvanute Gümnaasium KORDAMINE: FUNKTSIOONI GRAAFIK I Joonistel on kuue funktsiooni graafikud. Tee kindlaks, missuguste funktsioonidega on tegemist. 1 2 3 © Allar Veelmaa 2014 2 10. klass Viljandi Täiskasvanute Gümnaasium KORDAMINE: FUNKTSIOONI GRAAFIK II © Allar Veelmaa 2014 3 10. klass Viljandi Täiskasvanute Gümnaasium REAALARVUDE PIIRKONNAD Kuna erinevates õpikutes kasutatakse reaalarvude piirkondade märkimiseks erinevaid tähistusi, siis oleks kasulik teada mõlemat varianti. Nimetus Tingimus Esimene
KESKKOOLI MATEMAATIKA RAUDVARA 1. osa Andres Haavasalu dikteeritud konspekti järgi koostanud Viljar Veidenberg. 2003. aasta 1 Sisukord Sisukord........................................................................................................................................2 Arvuhulgad............................................................................................................................... 5 Naturaalarvude hulk N..........................................................................................................5 Negatiivsete täisarvude hulk z ...........................................................................................5 Täisarvude hulk Z.................................................................................................................5 Murdarvu
1. . . , ; - ; , 12. 2 p -n . -- , . . . , , . , . ., pnp npn. . , . . , 2 , pn . 7. ,
ERIALA Puidust kodaratega rattad 2000aastat e.m.a. Traatkodaratega rattad 1800aastate paiku 1950.aastal asendati autode traatkodaratega rattad metallratastega 1769.a auruvanker (Nicolas Cugnot) Max. 5km/h 1790.a jalgratas (M.de Sivrac) 1795.a hoburaudtee (Inglismaal) 1820.a aurusõidukite ehitamine 1845.a õhkrehvid (Robert William Thomson) 1883.a neljarattalist jalgratast meenutav aurusõiduk (auto eelkäija) 1895.a esimene bensiinimootor 1899.a rajati metallurgia laboratoorium 1910.a maailma esimene V-8 mootor 1885.a esimene mootorratas (Gottlieb Daimler) 1890.a esimene auto mille mootor paiknes ees(Rene Panhard ja Emile Levasson) 19.saj algus Esimesed bussid(sõna buss on tuletatud ladina-keelsest sõnast omnibus-kõigile) 1908.a Henry Ford rajs tehase automudeli T masstootmiseks 1894.a esimene autovõidusõit Pariis-Rouen (max. Kiirus 12km/h) 1955.a Le Mans'i võidusõit (Nõudis 84 inimelu ja vigastatuid üle 100-a) Maailma piki
MATEMAATIKA TÄIENDUSÕPE MÕISTED, VALEMID, NÄITED, ÜLESANDED LEA PALLAS I OSA SISUKORD 1. ARVUHULGAD …………………………………………………… 2 2. ARITMEETIKA ……………………………………………….…… 3 2.1 Mõningate arvude kõrgemad astmed ………………………….……. 3 2.2 Hariliku murru põhiomadus ………………………………….…….. 3 2.3 Tehetevahelised seosed ……………………………………….…….. 3 2.4 Tehted harilike murdudega ………………………………….……… 4 2.5 Tehete põhiomadused ……………………………………….……… 5 2.6 Näited tehete kohta positiivsete ja negatiivsete arvudega …….…….. 5 2.7 Näited tehete kohta ratsionaalarvudega ……………………….……. 6 2.8 Protsent ja promill ……………�
Analüütiline pindala määramine punkti nr. Xi Yi Yi+1-Yi-1 Xi-1-Xi+1 Xi(Yi+1-Yi-1) Yi(Xi-1-Xi+1) 1 6399587,577 653459,044 561,49 -592,02 3593298029,02 -386862130,15 2 6399624,480 653935,599 396,85 320,35 2539671776,01 209488923,08 3 6399267,226 653855,891 -85,60 744,48 -547770875,28 486782633,73 4 6398880,000 653850,000 -481,78 234,77 -3082858805,28 153503056,80 5 6399032,458 653374,110 -390,96 -707,58 -2501740133,65 -462312492,63 SUMMA 0,00 0,00 599990,83 599990,83 Pkoord=2P1/2*10000=599990,83/2*10000=30,00ha Magistraaljoone tagune pindala kujundi nr. Ja pindala arvutamise ai
Võrumaa Kutsehariduskeskus MH-08 Pneumaatika projekt Kodutöö Kristen Lalin MH-08 Juhendaja: Viktor Dremljuga Väimela 2009 Sisukord Sisukord.............................................................................................................................. 2 Sissejuhatus.................................................................................................................................3 Lahenduskäik.............................................................................................................................. 4 Andmed...................................................................................................................................4 Seadme kirjeldus.....................................................
PUITKONSTRUKTSIOONIDE ABIMATERJAL EVS-EN 1995-1-1:2005 EUROKOODEKS 5 Puitkonstruktsioonide projekteerimine Osa 1-1: Üldreeglid ja reeglid hoonete projekteerimiseks Koostas: Georg Kodi PUITKONSTRUKTSIOONID –ABIMATERJAL 1/106 Georg Kodi TALLINNA TEHNIKAÜLIKOOL ehitiste projekteerimise instituut SISUKORD 1. PUIDU TUGEVUSKLASSID..................................................................................................................... 4 2. MATERJALI VARUTEGURID ................................................................................................................ 10 2.1 Kandepiirseisund ............................................................................................................................. 10 2.2 Kasutuspiirseisund........................................................................................................................... 14 2.3 Elam
kaheks ebavõrdseks osaks. Balanseeriva osa pindala moodustab umbes 30 % kogu roolilehe pindalast. Balanseeritud rooli pööramiseks vajalik moment on tunduvalt vähem kui tavalisel roolil. · poolbalanseeritud, tavalise ja balanseeritud rooli vahepealne variant. Reeglina varustatakse mistahes laeva rooliseade põhi- ja tagavara rooliajamiga. Tagavaraajmit ei nõuta eraldi juhitavate roolimasinate mitme rooliseadmega laevadel. Hüdraulilise rooliseadme põhiosad on: · pump (pumbad 2 tk), · torustik, · armatuur, · juhtorganid, · Hüdrauliline pöördtiivik roolimasin on otse ühendatud ballerile Elektrohüdrauliline pöördtiivik roolimasin koosneb kahest rootorist ja staatorist. Rootor on kinnitatud otse ballerile. Roolimasina rootoril on suurema pöördemomendi andmiseks väiksemate kabariitide juures kolm rootorilaba, millede vaheline nurk on 120 . Rootorilabad on tihendatud vastu roolimasina korpust sisemiste tihenditega .
Decimal Binary Octal Hexadecimal Base-10 Base-2 Base-8 Base-16 0 0 0 0 1 1 1 1 2 10 2 2 3 11 3 3 4 100 4 4 5 101 5 5 6 110 6 6 7 111 7 7 8 1000 10 8 9 1001 11 9 10 1010 12 A 11 1011 13 B 12 1100 14 C 13 1101 15 D 14 1110 16 E 15 1111 17 F 16 10000 20 10 17 10001 21 11 18 10010 22 12 19 10011 23 13 20
21. Osaliselt tasustatav puhkus tööandja algatusel võib olla max 3 kuud 22. Töötajal on võimalik saada tasustatavat õppepuhkust sessi ajaks 30p 23. Töötajal on võimalik saada tasustatavat õppep keskkooli (gümn) lõpetamiseks 35p 24. Töötajal on võimalik saada tasustatavat õppep kõrgkooli lõpetamiseks 42p 25. Õppep korral makstakse keskm palka 10p 26. Puhkusetasusid on vaja inventeerida et vastavalt rp seadusele inventeerida ka kõik kohust 27. Puhkusetasu reserv kajastatakse rp-s puhkusetasuna+sots maks+t/k 28. Kui töötaja tuli tööle 14 veebr 08 ja puhkas 3kp kasutades selleks nn lapsepäevi, siis kui palju puhkust oli tal 08 a lõpuks välja teenitud? 26kp 29. Potentsiaalse puhkusetasu suuruse leidmisel puhkusereservi tarbeks võetakse aluseks töötaja viimase 6kuu töötasud ja preemiad v lähtutakse teatud juhtudel palga säilitamise põhimõttest 30
Tallinna Tehnikaülikool Informaatikainstituut Töö Tabelid Üliõpilane Õppemärkmik Õppejõud J. Vilipõld Õpperühm Palun täitke tühjad lahtrid MASB11 Sisukord Harjutused Suhtaadresside kasutamine 1 Suhtaadresside kasutamine 2 Absoluutaadressid Nimede määramine ja kasutamine 1 Nimede kasutamine. Diagrammide koostamine Palkide müümimne 1 Funktsioonide graafikud Ülesanded Palgid_2 Palgad Funktsioonide graafikud Lisa: valemite kopeerimine Suhtaadressid. Valemite kopeerimine Ruumide pindalad ja ümbermõõdud a b S P Vaadake valemeid tulbas S ja P ! 5,00 4,00 20,0 18,00 Nad on kõikides ridades analoogilised, 7,20 4,80 34,6 24,00 kuid erinevad aadressite poolest: igas reas on aadressi reanumber ühe võrra 6,35 5,12 32,5 22,94 suurem kui eelmises reas. 7,39 6,23
Tallinna Tehnikaülikool Ehitusteaduskond Ehitustootluse instituut SOOJUSISOLATSIOONIMATERJAL KIVIVILL Referaat Tallinn 2010 1 Standardikohane klassifikatsioon.........................................................................................2 2 Tootjad....................................................................................................................................7 3 Tootmine.................................................................................................................................8 4 Tooted....................................................................................................................................10 5 Soojustamisest üldiselt.........................................................................................................16 6 Võrdlus analoogidega............................................
Tallinna Tehnikaülikool Ehitiste projekteerimise instituut Kursuseprojekt aines "RAUDBETOONKONSTRUKTSIOONID. PROJEKT" Üliõpilane: S. Avdejev Matr. nr.: 000342 Juhendaja: J. Pello Esitatud: Arvestatud: Tallinn 2004 sisukord 1. LÄHTEÜLESANNE.................................................................................. 2 2. PLAADI ARVUTUS.................................................................................. 3 2.1. Koormused plaadile.........................................................................3 2.2. Plaadi sisejõud................................................................................ 3 2.3. Armatuuri dimensioneerimine..........................................
SISUKORD 1VUNDAMENDILE MÕJUVATE KOORMUSTE ARVUTUS............................................................3 1.1Materjalide mahumassid................................................................................................................3 1.2Normatiivsed koormused ruutmeetri kohta....................................................................................3 1.2.1Kandvad välisseinad...............................................................................................................3 1.2.2Kandvad siseseinad.................................................................................................................3 1.2.3Kerged vaheseinad..................................................................................................................3 1.2.4Vahelaed.................................................................................................................................3 1.2.5Katuslagi............
funktsioon ümberlülituskontakt Ühepooluseline Viitega sulguv kontakt neljaasendiga lüliti Viitega avanev kontakt Kahepooluseline lüliti Automaatennistusega Kolmepooluseline lüliti sulgekontakt Käsitsi juhitav lüliti, Relee mähis, üldtingmärk üldtingmärk Sulgekontakti ja Viitega rakenduva relee automaatennistusega mähis surunupplüliti Positsioonilüliti, Termorelee sulgekontakt toimeseadis 10. ELEKTRIMÕÕTERIISTAD JA ANDURID Tingmärk Nimetus Tingmärk Nimetus
MATEMAATIKA TÄIENDÕPE VALEMID JA MÕISTED KOOSTANUD LEA PALLAS 1 2 SAATEKS Käesolev trükis sisaldab koolimatemaatika valemeid, lauseid, reegleid ja muid seoseid, mille tundmine on vajalik kõrgema matemaatika ülesannete lahendamisel. Kogumikus on ka mõned kõrgema matemaatika õppimisel vajalikud mõisted, mida koolimatemaatika kursuses ei käsitletud.. 3 KREEKA TÄHESTIK - alfa - nüü - beeta - ksii - gamma - omikron - delta - pii - epsilon - roo - dzeeta - sigma - eeta - tau - teeta - üpsilon - ioota - fii - kapa - hii - lambda - psii - müü - oomega
pidurikambritesse. Sele 10. Proportsionaalne releeklapp (allikas: WABCO) Sele 11. Proportsionaalse releeklapi lõige (allikas: WABCO) Juhtplokist saadud signaali alusel avab proportsionaalne magnetklapp suruõhu pääsu kolvipealsesse ruumi, kolb liigub alla, avaneb sisselaskeklapp ja suruõhk pääseb avast 1 ava 2 kaudu pidurikambritesse. Pidurdusrõhu etteantud nimiväärtuse saavutamisel sisselaskeklapp sulgub ja pidurdamine toimub püsival suruõhu rõhul. Paralleelselt saadab rõhuandur (P/U) EBSi juhtplokki tagasi pingesignaali, mis on proportsionaalne pidurdusrõhuga kambrites. Pidurduse lõpul lastakse kasutatud suruõhk ava 3 kaudu välisõhku. EBSi rikke korral tüürib proportsionaalne releeklapp koos pidurikraani alumise haruga ava 4 kaudu esisilla pidurdusrõhku, lastes avas 1 olevat suruõhku avasse 2 proportsionaalselt pedaalile vajutamisele. Pidurdamise lõppedes laseb klapp kasutatud suruõhu välisõhku.
1. Kahemuutuja funktsiooni integraalsumma mõiste ja geomeetriline sisu. · Olgu D kinnine tõkestatud piirkond ruumis R2. Olgu z = (x,y) piirkonnas D määratud pidev funktsioon. Jaotame piirkonna D n tükiks S1,S2,...,Sn.Tähistagu Si samaaegselt nii i-ndat tükki kui ka i-nda tüki pindala.Valime igalt tükilt ühe punkti P ja moodustame järgmise summa: Vn= (P1) S1 + (P2) S2+...+ (Pn) Sn Seda summat Vn nim funktsiooni integraalsummaks piirkonnas D · Olgu (x,y) 0. siis saab integraalsummas olevat korrutist (P i) Si tõlgendada kui silindri ruumala, mille põhi on S i ja kõrgus (Pi) Selline silinder tähistatakse Zi-ga. IntegraalsummaVn on järelikult silindrite ühendi Z=Z1 U Z2 U...U Zn ruumala. Silindrite ühend Z on treppkeha, mille ülemine pind on tükiti tasapinnalineomades hüppeid erinevate kõrgustega naaber silindrite liitekohtades. 2. Kahekordse integraali mõiste j
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(