Analog Interfacing to Embedded Microprocessors Real World Design Analog Interfacing to Embedded Microprocessors Real World Design Stuart Ball Boston Oxford Auckland Johannesburg Melbourne New Delhi Newnes is an imprint of Butterworth–Heinemann. Copyright © 2001 by Butterworth–Heinemann A member of the Reed Elsevier group All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. Recognizing the importance of preserving what has been written, Butterworth–Heinemann prints its books on acid-free paper whenever possible. Library of Congress Cataloging-in-Publication Data Ball, Stuart R., 1956– Analog interfacing to embedded microprocessors : real world design / Stuart Ball. p. cm. ISBN 0-7506-7339-7 (pbk. : alk. paper) 1. Embedded computer
Haapsalu Kutsehariduskeskus Arvutigraafika Adobe Photoshop CS6 baasil Mario Metshein Sisukord Sisukord.......................................................................................................1 02 - Photoshop - Mis on arvutigraafika.........................................................4 03 - Photoshop - Tere Photoshop..................................................................9 04 - Photoshop - Esimene pilditöötlus (Ülesanne 1)...................................24 05 - Photoshop - Mittelõhkuv pilditöötlus (Ülesanne 2)..............................41 Ülesanne 2.................................................................................................61 06 - Photoshop - Pildiparandused (Ülesanne 3)..........................................63 Ülesanne 3.................................................................................................69 07 - Photoshop - Kihiline pilditöötlus (Ülesanne 4).....................................71 Üle
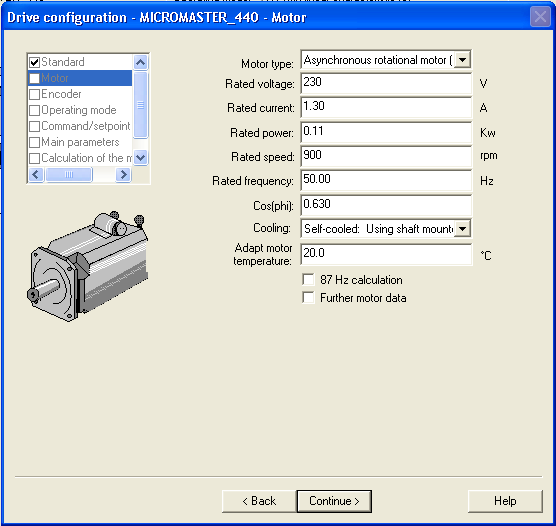
........................................................................................ 45 5.7. Asünkroonmootori pidurdamine ....................................................................................... 46 5.8. Arvutusülesanne ................................................................................................................ 48 6. Sagedusmuunduriga elektriajam ...................................................................................... 49 6.1. Sagedusmuundur ja tema tööpõhimõte ............................................................................. 49 6.2. Sagedusjuhtimine .............................................................................................................. 51 6.3. Väljatugevuse vähenemine nimisagedusest suurematel sagedustel .................................. 51 6.4. Konstantse momendi talitlus kuni 87 Hz sageduseni ........................................................ 52 6.5. Pulsilaiusmodulatsioon..........
Cat. No. W317-E1-11 SYSMAC CPM1A Programmable Controllers OPERATION MANUAL CPM1A Programmable Controllers Operation Manual Revised October 2007 iv Notice: OMRON products are manufactured for use according to proper procedures by a qualified operator and only for the purposes described in this manual. The following conventions are used to indicate and classify precautions in this manual. Always heed the information provided with them. Failure to heed precautions can result in injury to people or dam- age to property. ! DANGER Indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury. Additionally, there may be severe property damage. ! WARNING Indicates a potentially hazardous situation which, if not avoided, could result in death or serious inju
Sissejuhatus Iga arvutiga antakse kaasa vähemalt üks komplekt programme operatsioonisüsteem. Operatsioonisüsteemi abil saad arvutile korraldusi anda. Sinu arvutis on üks moodsamaid operatsioonisüsteeme Microsoft Windows XP. See on töökindel, kiire ja võimas. Windows XP-st on kolm versiooni: 64-bitine, Professional ja Home Edition. 64-bitine on mõeldud ainult võimsate 64-bitiste protsessoritega arvutite jaoks. Professional on mõeldud eelkõige tööalaseks kasutamiseks, seal kus töökindlus on kriitiline, nt klientide teenindamisel. Home Edition on mõeldud kodukasutajatele. Kahel viimasel operatsioonisüsteemi versioonil on ühesugune tuum, kuid Professional sisaldab lisavõimalusi, mis on vajalikud kontoriarvutites ja tööjaamades, nt kahe protsessori tugi, failide ja kaustade krüpteerimine, erinevate õigustega kasutajad jms. Käesolevas dokumendis toodu käib mõlema versiooni kohta, kui pole teisiti öeldud. Võrreldes Windows 2000-ga, on laiendatud riistvara ja m
A... AA Auto Answer AAA Authentication, Authorization and Accounting AAB All-to-All Broadcast AAC Advanced Audio Coding AACS Advanced Access Control System AAL Asynchronous Transfer Mode Adaption Layer AAM Automatic Acoustic Management AAP Applications Access Point [DEC] AARP AppleTalk Address Resolution Protocol AAS All-to-All Scatter AASP ASCII Asynchronous Support Package AAT Average Access Time AATP Authorized Academic Training Program [Microsoft] .ABA Address Book Archive (file name extension) [Palm] ABAP Advanced Business Application Programming [SAP] ABC * Atanasoff-Berry Computer (First digital calculating machine that used vacuum tubes) ABEND Abnormal End ABI Application Binary Interface ABIOS Advanced BIOS ABIST Automatic Built-In Self-Test [IBM] ABLE Adaptive Battery Life Extender + Agent Building and Learning Environment [IBM] ABM Asynchronous Balanced Mode ABR Available Bit Rate ABRD
Eksami küsimused: 1. Mida tähendab mitmekiireline levi Mitmekiireline levi – info levib mööda peegeldusi, otselevi on väga harva. Kohale jõuab mitu lainet samaaegselt. Halb, sest lained liituvad (võivad tasakaalustada ennast ning signaal kustub ära, nõrgeneb). Kuna inimene liigub, muutub sagedus – lainepikkus – tuleb kogu aeg kanalit järgi kruttida. 2. Mida tähendab alla- ja üleslüli ning dupleks kaugus mobiilsides Pertaining to computer networks, a downlink is a connection from data communications equipment towards data terminal equipment. This is also known as a downstream connection. The uplink port is used to connect a device or smaller local network to a larger network, or connect to the next "higher" device in the topology. For example, the edge switch connects "up" to the distribution layer managed switch. Lühidalt - The communication going from a satellite to ground is called downlink, and when it is
ATM võrgus kantakse üle sõnumit pikkusega 9600 baiti, leida minimaalne bitikiirus sidekanalis, kui sõnumi ülekandeks on aega 10 ms. 53B on pakett, milles 5B on p2is. 9600/48=200 200*53/0,01 V:8,48Mbit/s ATM võrgus kantakse üle sõnumit pikkusega 9600 baiti, leida minimaalne bitikiirus sidekanalis, kui sõnumi ülekandeks on aega 100 ms. 9600/48*53/0,1 V:0,848Mbit/s etherneti pakett;8 bait - preambul - ülesannetes ei arvestata;6 bait - saaja aadress;6 bait - saatja aadress; 2 bait pikkus;46-1500 - andmed (data);CRC - 4 bait. ATM võrgutehnooloogia kohaselt on paketi pikkus 53 baiti. Kuidas tuleks valida ülekantava infofaili pikkus, et saavutada maksimaalne ülekande efektiivsus. - ATM v6rgus on p2is 5 baiti, seega kasulik info 48 baiti. Infofaili pikkus peab olema 48 baiti, et tekiks t2isarv pakette. Ethernet võrgu (10 Mb/s) kanalikihis kanti üle pakette pikkusega 64 baiti. Leida 512-baidise infosõnumi ülekandeaeg. P2is 48+48+16+32=144 b (ehk 18B). Seega yhes pak












































Kõik kommentaarid