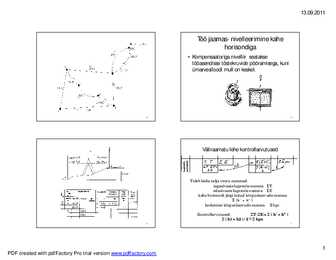
48 49 Väliraamatu lehe kontrollarvutused Tuleb leida nelja veeru summad: tagasivaate lugemite summa T edasivaate lugemite summa E kahe horisondi järgi leitud kõrguskasvude summa (h´ + h" ) keskmiste kõrguskasvude summa hpr.
pärast seda, kui ta on sidepunktilt ära võetud ja neid punkte nimetatakse vahepunktideks. Kui on vaja näiteks määrata A ja B vaheline kõrguskasv liitnivelleerimisega ja teada on A kõrgus ning otsitakse B, siis tehakse esimeses jaamas esimese ja tagumise lati lugemid. Punktil A olev latt viiakse teisele sidepunktile ja teises jaamas tehakse lugemid. Esimese sidepunkti latt viiakse punktile B ja kolmandas jaamas tehakse lugemid. Kõrguskasvu hAB saad teada, kui tagumiste lattide lugemite summa lahutad esimeste lattide lugemite summast. HB=HA+hAB Kuidas võrdub kõrguskasv liitnivelleerimisel? Liitnivelleerimisel võrdub kõrguskasv käigu üksikute kõrguskasvude summaga ehk tagasivaate lugemite summa miinus edasivaate lugemite summa. Mis on nivelleerimislatid? Nivelleerimislattidele kantud jaotistele toetudes on võimalik fikseerida latilt niitristi horisontaalniidi järgi nn latilugem. Kaasaegsed latid on ühepoolsed alglugemina OOOO. Kuidas teha latilugemeid?
pindalaga. Kontuuri pindala saamiseks tuleb mõõteratta veeremisteekond korrutada planimeetri jaotise väärtusega p (planimeetri lugemi viimase koha ühikule vastav pindala). 4.2. Millised on töövahendid? planimeeter, digitaalplanimeeter 4.3. Kuidas toimub planimeetri jaotise väärtuse määramine? Mõõdetakse tuntud pindalaga kontuuri (koordinaatide ruudustiku ruut, sabloon) pp või pv asendis. Lugemite tegemise järjekord: Alguspunktis lugem enne ümbervedamist (u1), pärast esimest ümbervedamist alguspunktis uus lugem (u2), pärast teist ümbervedamist alguspunktis lugem (u3). Nüüd saame ühe lugemite vahe asemel kaks vahet ja vahede erinevuse põhjal hinnata mõõtmiste täpsust. Lubatud erinevuse korral arvutatakse vahede keskmine ning siis M õõ detud kontuuri pindala leitakse jaotise väärtus valemist: p = u k 4.4
lugemid vastavalt kontiigideks. Kontiig ehk piirnevaid järjestusi moodustavad komplekt ülekattuvaid DNA segmente (lugemid), mis üheskoos moodustavad ühe DNA regiooni konsensuspiirkonna. Kontiigide puhul ei ole teada, kummast DNA ahelast on nad rekonstrueeritud. Asukoha määratlemiseks viiakse kontiigidega läbi protseduur, mida nimetatakse skäffoldimiseks. Skäffoldimisetapil kasutatakse kahte tüüpi järjestusi: kontiige (liidetud lugemeid) ja lugemite paare (mate pair). Toimub kontiigide järjestamine ning orienteerimine kasutades lugemite paarist pärit lisainformatsiooni, mis leidub nende järjestuse mõlemas otsas (paired end). Paariliste lugemite tegemisel fragmenteeritakse DNA ja saadakse järjestusi, mille otsi sekveneeritakse genereeritakse lugemid. Fragmentide keskmine piirkond jääb tavaliselt sekveneerimata. Skäffold koosneb kontiigidest ja kontiigide vahele jäävatest tühimikest (gaps)
kollimatsioonitasapinnaks. Nõude mitte täitmisel moodustab viseerimiskiir kaks koonilist tasapinda. Nurka viseerimiskiire ja pikksilma pööramisteljega risti oleva suuna vahel nimetatakse kollimatsiooniveaks. Kontrolliks viseeritakse ring paremal asendis instrumendi horisondi kõrgusel asuvale kaugele punktile ja tehakse horisontaalringi lugem P. Pikksilm viiakse üle seniidi ja korratakse sama ringi vasakul asendis, saades horisontaalringi lugemi V. Kui lugemite vahe on 180 kraadi, on nõue täidetud. Nõue on täidetud Lugemite erinevus 180 kraadist kannab nimetust (kahekordne) kollimatsiooniviga 2c. Justeerimiseks tuleb leida lugem Õ (ring vasakul asendi jaoks), mis on veast c vaba. Järgnevalt tuleb alidaadi peenliigutuskruvist keerata horisontaalringi lugemiks Õ, selle tulemusel läheb niitristi keskpunkt vaadeldavalt punktilt ära. Justeerimiseks tuleb
Viseeritakse esimesele latile, seatakse mull keskele ja võetakse lugem B1. Muudetakse instrumendi kõrgust u 20 cm ning korratakse sama protseduuri (saadakse lugemid A2 ja B2) Arvutatakse H1 = A1 B1 H2 = A2 B2 Kõrguskasvude vahe võib olla kuni 5mm Hkesk = (H1 + H2) / 2 Instrumendi kõrguse muutmine on vajalik kontrolliks (alati seda ei tehta). Enne järgmisse jaama minekut tuleb arvutada välja kõrguskasvud ja keskmised kõrguskasvud. 32. Milline on lugemite tegemise järjekord? Lati lugemite tegemise järjekord: 1) tagasivaade lati musta poole järgi (tagumise lati lugem). 2) edasivaade lati musta poole järgi (esimese lati lugem). 3) edasivaade lati punase poole järgi 4) tagasivaade lati punase poole järgi. 33. Mis on liitnivelleerimine? Liitnivelleerimine: juhul, kui kahe punkti vahelist kõrguskasvu ei ole võimalik määrata ühest jaamapunktist, tuleb seda rakendada. Liitnivelleerimisel kasutatakse sidepunkte kõrguste
Rühm: EAUI 61 Juhendaja: Mirko Mustonen Kuupäev: 13.03.18 Tallinn 2018 Töö eesmärk: tutvuda plastse materjali (madalsüsinikterase) ja hapra materjali (hallmalmi) käitumisega väändel ning määrata olulisimad karakteristikud. 1. Väändekatse terasega Joonis 1. Katsekeha mõõtudega 1.1. Nihkeelastsusmoodul Tabel 1. Katseandmed Algkoormus Väändemoment Lugemid Lugemite vahed T a1 a2 a1 a2 a1-a2 kgfcm Nm mm mrad 250 24.5 0 0 0 0 0 500 49 24,5 460 155 - - - - 750 73,5 49 447 159 13 4 9 4,5
Kui kollimatsiooniviga 2c _ 1_ on nõue täidetud. 2c = (LRv - LRp )± 180°=(359°59´51´´-180°00´04´´)±180°=0°0´13´´ 5. Vertikaalringi nulliase (NA) kontrollimine. Vertikaalringi nulliase (NA) peab olema nullilähedane. NA määramisel tuleb viseerida umbes 100 m kaugusel asuvale punktile kahes vertikaalringi asendis Rp ja Rv ja teha lugemid vertikaalringilt LRp ja LRv. NA teisele punktile tehtud lugemite järgi. Arvutatakse NA2. Kui NA1 - NA2 <:10_ on nõue täidetud. 6. Inklinatsioonivea määramine. Pikksilma horisontaalne pööramistelg peab olema risti teodoliidi põhiteljega. Asetada teodoliit seinast 1020 m kaugusele ja seinal 2535° kõrgusel. Vahe on 1 mm. 7. Prisma konstandi määramine. AB=44,677 AC=44,677+40,077=84,754 BC=40.077 Prisma h=1,595 Prisma h=1,565 h=1,443
Kõrguste standardhälbed on võetud programmi Geo2012 tasandusaruandest. Praktikumis teostati Mart Härma juhendamisel digitaalnivelliiri kontroll ülalnimetatud meetodit kasutades. Näbaueri meetodi puhul tuleb märkida maha kolm 15 meetri pikkust lõiku. Kahele keskmisele punktile asetatakse latid ja seejärel võetakse vastavalt instrumendi juhistele neile lugemid. Praktikumis olid kasutusel Trimble koodlatid. Kohati ilmnes probleeme lattidelt lugemite võtmisega- instrument ei saanud latilt selget lugemit ning andis veateate. Selline probleem on varasemast tuttav ning selle vastu aitas kas lati ülepühkimine salvrätikuga või korduvate mõõtmistega. Lisaks tehti läbi laululava taga paiknevate kolme vaatlusvõrgu punkti omavaheliste kõrguskasvude määramine. Igaüks, kes soovi avaldas, sai selle ise läbi proovida ja õpitut meelde tuletada.
ja vertikaalringi vesilood ning mõõtmise abivahendiks kasutati erilist kaugusmõõtelatti. Ringtahhümeeter Ajalugu • Esimene automaattahümeeter, nn reduktsioontahhümeeter konstrueeriti 1865. aastal. Sellel on okulaaris vaid üks horisontaalniit ja kauguse mõõtmiseks vajalik parallaks tekitatakse pikksilma okulaaripoolse otsa vertikaalse liigutamisega kahe piirasendi, kontakti vahel. Pikksilma kaldenurga arvestamiseks on tangensskaala. Latilt leotud lugemite vahe annab otseselt kauguse ilma täiendavate arvutusteta, kõrguskasv arvutatakse kaldenurga tangensi abil. Reduktsioontahhümeeter Ajalugu • Järgmine oluline etapp automaattahhümeetrite arengus oli diagrammtahhümeeter, millel vertikaalringi asemel on erilise kõverjoonelisi diagramme sisaldav pealmik. Diagrammide kujutis projitseeritakse optilise süsteemi abil pikksilma vaatevälja, kus on nähtav viseeritav vertikaalne mõõtelatt
23.Nivelliiride jaotus.- 1) Silindrilise vesiloodiga ehk elevatsioonikruviga nivelliirid (kõige vanem) 2)Kompensaatoriga (optilised) nivelliirid- Laialdase kasutuse on leidnud nivelliirid, mis omavad spetsiaalse seade, mille abil viseerimiskiir automaatselt võtab horisontaalse asendi. Seda seadet nimetatakse kompensaatoriks. 3)Digitaalnivelliirid (elektronnivelliirid) koos digitaallatiga- Digitaalnivelliirid on kompensaatori, sisearvuti ja mäluga. Need võimaldavad automaatset lugemite tegemist koodlatilt, kõrguskasvu arvutust ja salvestamist. Lisaks eelnevale saadakse ka kaugus instrumendist latini, samuti on võimalik automaatne projektkõrguste väljamärkimine. 24.Mis on punkti absoluutkõrgus? - Absoluutne kõrgus on nullnivoopinna ja määratava punkti vaheline loodjoonesuunaline kaugus. Punktidevaheline kõrguskasv on kahe punkti kõrguste vahe. Maapinna tõusu suunas loetakse kõrguskasv positiivseks, languse suunas negatiivseks. Kõrguskasvu võib arvutada
kalibreeritava termopaariga. Temperatuuriregulaator töötab pulseerivas reziimis. Ahju soojusliku inertsi tõttu stabiliseerub temperatuur aeglaselt etteantud väärtuse juures. Stabiliseerunud temperatuuride (s.t. voltmeetri näit ei tohi muutuda 30 sekundi jooksul rohkem kui 0,006mV võrra) korral fikseeritakse mõlema voltmeetri näidud. Kalibreerimise lõpptemperatuur ei tohi ületada ahjule lubatavat kõrgeimat töötemperatuuri. Mõõtmise üldine ulatus ja lugemite tihedus tuleb kooskõlastada juhendajaga. Kui esimene temperatuur tasakaaluolukorras on fikseeritud, suurendatakse temperatuuri etteannet 25 °C võrra. Kui temperatuur on stabiliseerunud, fikseeritakse näidud. Nii jätkatakse kuni viimase etteantud temperatuurini. Tabel 1.1 1
viseerimiskiire rõhtasendis. Nivelleerimislattide kontrollimine: *Lati detsimeeter ja meeterjaotiste kontrollimine (lubatav viga ±1 mm). *Lati paided kontrollimine (f = a2 (a1 + a3)/2; lubatav paine ±10 mm). * Lati vesiloodi kontrollimine. *Lati konstandi määramine. * Lati tallaasendi ja telje ristioleku kontrollimine [erinevates latiasendites (parem, vasak, eesmine ja tagumine serv) võetud lugemid võivad keskasendis võetud lugemist erineda 0,5 mm]. 8. Ühepoolse latiga lugemite tegemise järjekord: TV, EV, instrumendi kõrguse muutmine, TV, EV. Kahepoolse latiga: TV, EV, keerata latt teist pidi, EV, TV. Arvutamine: TVm-EVm = hm, TVp-EVp=hp, /hm-hp/ 5mm, hk=(hm+hp)/2. Lk=Lp-Lm, /Lk- Lkteor/ <5mm. (L-käigu pikkus km-tes 0,1 km täpsusega.) h k-hteor ±20mmL(km) või ±50mmL(km) või ±10mmn. hteor= 0 (kinnises käigus), hteor= Hviimane-Hesimene (lahtises käigus). Lati konstant on 4800mm, kahepoolse latiga möötes peab esimese TV ja EV ning
Laboratoorne töö nr. 16 Pindalade määramine analüütiliselt ja graafiliselt Koostas Juri Belov Juhendas Tarmo Kall Pindalade mehaaniline määramine Planimeetri jaotise väärtuse määramine. Plaani mõõtkava 1: 5000 Lugemite Keskmine Kõlviku nimetus Planimeetri lugem vahe vahe Pindala (ha) Ruut 10×10 cm 7682 Poolus paremal (pp) 8723 1041 25/1049=0,0238 9771 1048 1049 32 821 1050 p=0,023832
1. Mis on täisvõtete eelis poolvõtte ees? Täisvõtted lisavad täpsust, nullivad kollimatsiooni- ja nulliaseme vea, lisavad üsaldusväärsust ja kontrollitavust. Veatul mõõtmisel näitab horisontaalsuuna lugemite vahe poolvõtetest kahekordset kollimatsiooniviga. 2. Miks on vaja teha tahhümeetris läbi orienteerimisprogramm? Orienteerimine on vajalik lähtediriktsioonnurga saamiseks ja direktsioonnurga saamiseks järgmisele punktile. Seega vajame alustamiseks kahte kindelpunkti. 3. Mis on kõrguse mõõtmise lubatav viga käigus? 5cm 4. Mis on situatsioonipunkti lubatav viga käigu suhtes? 5cm 5. Mis on mõõdistusvõrgu punkt? Plaanilis-kõrgusliku sidumise käigus moodustatud kohtkindla
kontrollimisel. Leidmaks punktide Aja B kõrguskasvu asetatakse nivelliir punti A peale. Kõrgus i on instrumendi kõrgus. Kõrguskasv hAB=i-lB(B latti lugem). 11. Liitnivelleerimine. Rakendatakse kui punktide kõrguskasvu ei ole võimalik määrata ühest jaamapunktist. Põhjus, punktide kaugus liiga suur või takistus või reljeef. Kõrguskasv hAB võrdub käigu üksikute kõrguskasvudesummaga ehk tagasivaate lugemite summa miinus edasivaate lugemite summa. Bunkti B kõrgus=HA+hAB. Kui punktide kõrgused saadakse teada nivoopinnast, siis nim need absoluutseteks kõrgusteks ekh altituudideks. 12. Nivelliiride tüübid konstruktsiooni erinevusest lähtuvalt. Silindrilise vesiloodiga e. Elevatsioonikruviga - põhidetailid on pikksilm, silindriline vesilood, kolme tõstekruviga alus. Tööpõhimõtte: kui viseerimiskiir on paraleelne silindrilise vesiloodi
= (1) kus m-anuma mass, g; - liiva ja anuma mass, g; V- anuma maht, ; Tabel 1. Puistetiheduse määramine. Liiva terade tiheduse määramine. Kuivatatud liiva keskmisest proovist, mis on läbinud sõela avaga 5 mm, kaalutakse 200-300 g. See liiv puistatakse 500-ml mensuuri, kuhu on eelnevalt valatud 250 ml vett. Liivaterade ruumala määratakse mensuuri lugemite vahena. Liiva terade tihedus [kg/] arvutatakse valemist 2: (2) kus on m proovi mass, g; vee ruumala mensuuris, ; vee ja liiva ruumala mensuuris, . Erinevus kahe määramise vahel ei tohi olla suurem kui 20 kg/. Tabel 2. Liiva terade tiheduse määramine. Liiva tühiklikkuse arvutamine.
2. Milline oli nivelleerimise metoodika esimese kordusnivelleerimise perioodil? Nivelleerimisel kasutati optilise mikromeetriga täppisnivelliire Zwiss III ja Zeiss A. Lattideks olid 3- meetrised invarlindiga nivelleerimislatid. Nivelleerimisel nivelleeriti sidepunktide keskelt nn. ühildamise meetodil. Kaugus instrumendist latini oli 50 m ning see määrati kas mõõdulindi või trossi abil. Edasi- ja tagasikäikude lubatud vahe võis jääda ± 1,5 mm/km ning põhi- ja abiskaalade lugemite erinevus ei võinud ületada 0,4 mm. 3. Milline oli nivelleerimise metoodika teise ja kolmanda kordusnivelleerimise perioodil? Teise ja kolmanda nivelleerimise perioodil kasutati kõrgtäpseid loodnivelliire Zeiss A, HA-1, kompensaatornivelliire Koni 007 ja invarlatte. Latid asetati seisupunktides kas väljavõetavatele vaiadele või nn püsivalt ettelöödud metallvaiadele. Vaiad löödi tee äärde kogu päevase töömahu (6-8 km) ulatuses. Edasi-tagasi nivelleerimine toimus
Mõõtetulemused: Mõõte- Lugem ristlõikes Keskm- Seade- Tegelik siht A-A B-B C-C hälve mõõde mõõde I-I -0,02 +0,01 +0,06 0,015 100 100,015 II - II -0,03 +0,03 +0,04 Ovaalsus 0,01 0,02 0,02 7. Arvutasin kõigi lugemite aritmeetilise keskmise ( ka hälvingu märk on tähtis), liitsin selle seademõõtmele ja nii sain tegeliku mõõtme. 8. Joonestasin järeldusena silindri kaks ristuvat vertikaallõiget ja analüüsides mõõtetulemusi näitasin neil (liialdatult) silindri sisekontuuri tegeliku kuju (koonilisus, nõgusus, kumerus). 9. Võtsin mõõteriista lahti, õlitasin mõõtepinnad (ka mõõteplaatidel ja külgmikel), panin need karpi ja korrastasin töökoha. 10
· Samal viisil viseeritakse eesmisele punktile C ja tehakse võetakse lugem (2). Nurk (ABC) arvutatakse (2)- (1)=RV. · Teiseks poolvõtteks (RP) keeratakse pikksilm üle seniidi, viseeritakse nüüd eesmisele C. Võetakse lugem (3). · Seejärel viseeritakse tagumisele punktile (A) ning võetakse lugem (4). Nurk (CBA) arvutatakse (4)-(3)= RP · Tulemeid RV ja RP tuleb omavahel võrrelda. Lugemite vahe ei või olla suurem kui kahekordne lugemi täpsus: RV - RP < 2'. · Nurga väärtus on kahe poolvõtte keskmine. 29. Teodoliidi teljestik, nõuded teodoliidi telgedele. VV- vertikaaltelg, horisontaalringi alidaadi pöörlemistelg, teodoliidi
Samal viisil viseeritakse eesmisele punktile C ja tehakse võetakse lugem (2). Nurk (ABC) arvutatakse (2)-(1)=βRV. Teiseks poolvõtteks (RP) keeratakse pikksilm üle seniidi, viseeritakse nüüd eesmisele C. Võetakse lugem (3). Seejärel viseeritakse tagumisele punktile (A) ning võetakse lugem (4). Nurk (CBA) arvutatakse (4)-(3)=βRP Tulemeid βRV ja βRP tuleb omavahel võrrelda. Lugemite vahe ei või olla suurem kui kahekordne lugemi täpsus: βRV - βRP < 2’. Nurga väärtus on kahe poolvõtte keskmine. 29. Teodoliidi teljestik, nõuded teodoliidi telgedele. VV- vertikaaltelg, horisontaalringi alidaadi pöörlemistelg, teodoliidi põhitelg;
Muudetakse instrumendi kõrgust u 20 cm ning korratakse sama protseduuri (saadakse lugemid A2 ja B2) Arvutatakse H1 = A1 B1 H2 = A2 B2 Kõrguskasvude vahe võib olla kuni 5mm Hkesk = (H1 + H2) / 2 Instrumendi kõrguse muutmine on vajalik kontrollid (alati seda ei tehta) Enne järgmisse jaama minekut tuleb arvutada välja kõrguskasvud ja keskmised kõrguskasvud. 32. Milline on lugemite tegemise järjekord? TEET tagumine lugem, eesmine lugem, (instrumendi kõrguse muutmine), eesmine lugem, tagumine lugem 33. Mis on liitnivelleerimine? 11 34. Projektkõrguse välja märkimine. Projektkõrguse väljamärkimiseks tuleb esmalt võtta tagumise lati lugem. Seejärel tuleks leida instrumendi kõrgus valemiga Hi=TL+HA
Näiteks on geodeedi märgitud seinareeprist võetav kõrgus mingite avade lõikamisel, või podestide paigaldamsiel, kasutatakse ikka oma ettevõttes oelmas olevat teodoliiti. 4.2 Nivelliir Nivelliir (vt Joonis 9 ) on instrument, mis tööasendis tagab horisontaalse viseerimiskiire (niitristi keskmine horisontaalniit). Sõltuvalt konstruktsioonist võib eristada: elevatsioonikruviga ehk silindrilise vesiloodiga nivelliir ja kompensaatoriga nivelliir. Nivelleerimislattidelt tehtud lugemite vahe (erinevus) annab maastikupunktide (latipunktide) kõrgusliku erinevuse ehk kõrguskasvu. Digitaalnivelliirid on kompensaatori, sisearvuti ja mäluga. Need võimaldavad automaatset lugemite tegemist koodlatilt, kõrguskasvu arvutust ja salvestamist. Lisaks saadakse ka kaugus instrumendist latini, samuti on võimalik automaatne projektkõrguste väljamärkimine. 12 Joonis 9. Nivelliir Bosch GOL 26 D Allikas: www.tooriistamaailm.ee 4
[1] Joonis 1 Ringtahhümeeter [1] 3 Esimene automaattahümeeter, nn reduktsioontahhümeeter konstrueeriti 1865. aastal. Sellel on okulaaris vaid üks horisontaalniit ja kauguse mõõtmiseks vajalik parallaks tekitatakse pikksilma okulaaripoolse otsa vertikaalse liigutamisega kahe piirasendi, kontakti vahel. Pikksilma kaldenurga arvestamiseks on tangensskaala. Latilt leotud lugemite vahe annab otseselt kauguse ilma täiendavate arvutusteta, kõrguskasv arvutatakse kaldenurga tangensi abil.[1] Joonis 2 Reduktsioontahhümeeter [1] Järgmine oluline etapp automaattahhümeetrite arengus oli diagrammtahhümeeter, millel vertikaalringi asemel on erilise kõverjoonelisi diagramme sisaldav pealmik. Diagrammide kujutis projitseeritakse optilise süsteemi abil pikksilma vaatevälja, kus on nähtav viseeritav vertikaalne mõõtelatt. Pikksilma
mõõdetakse atmosfääri niiskust kaudselt kahe temperatuurisensori (tavaliselt termomeetri) abil. Mõlemad termomeetrid on ehituselt ühesugused, erinevus seisneb selles, et ühe neist – “märja” termomeetri – reservuaar hoitakse märjana. “Märja” termomeetri reservuaarilt aurab vesi. Selleks kulunud auramissoojuse tõttu on “märja” termomeetri temperatuur madalam “kuiva” omast. Mida suurem on niiskuse defitsiit, seda kiirem on aurumine ja seda suurem on termomeetrite lugemite vahe. 12. Millal suureneb suhteline niiskus? Mis on kastepunkt? Kui temperatuur langeb kastepunktist madalamale, siis …..? 13.Mida nimetatakse pindpinevuseks? Pindpinevus on pinnanähtus, kus vedeliku pinnakiht käitub kui elastne kile 14. Millega iseloomustatakse pindpinevust? Sigma (sümbol puudu) = F/l (N/m) Pindpinevust võrreldakse tihti põhjendatult venitatud (pingutatud) elastse kilega. 15.Adhesiooni-Kui vihmapiisk jõuab aknale, siis hoiavad teda seal kinni jälle molekulaarjõud
Geodeetiline nurgamõõdistusinstrument, saab mõõta vertikaalnurka või seniitkaugust ja horisontaalnurka, niitkaugusmõõtur võimaldab joonepikkuste mõõtmist. 2. Mis on limb ja mis on alidaad? Limbi servale on kantud kraadijaotised päripäeva 0360 kraadi. Alidaad on teodoliidi liikuv osa, millele on kinnitatud viseerimisseadis (pikksilm), lugemisseadised ja vesilood. 3. Horisontaalnurga määramise viisid 1. Täisvõte nurk mõõdetakse kaks korda. Nurk võrdub limbilt tehtud lugemite vahena. Täisvõte koosneb kahest poolvõttest. Esimese poolvõttega mõõdetakse nurk ühes vertikaalringi asendis. Seejärel pööratakse pikksilm üle seniidi ja mõõdetakse nurk teise poolvõttega teises vertikaalringi asendis. 2. Limbi teatud lugemi suunamist näiteks teodoliitkäigu punktile- või magnetilise põhjapooluse suunas nim. Limbi Orienteerimiseks, sel juhul võrdub horisontaalringilt tehtud lugem horisontaalnurga suurusega. 4. Selgita täisvõtet nurga määramisel
võimaldab määrata pikksilma asendit küllaltki täpselt (olenevalt nooniuse täpsusest). Limbi ekstsentrilisusest tingitud ebatäpsuste vältimiseks on mõned goniomeetrid varustatud kahe nooniusega (N1 ja N2), mis on teineteise suhtes 1800 võrra nihutatud. Lugemise hõlbustamiseks on noonius sageli varustatud luubiga. Goniomeetril ГС-5 on lugemi võtmiseks mõõtemikroskoop. Pikksilma pöördenurk võrdub tema kahes erinevas asendis võetud lugemite ϕ1 ja ϕ 2 vahega. Kui pikksilma pööramisel noonius läbib limbi nullpunkti, siis pöördenurk võrdub lugemite vahe täiendusnurgaga 3600-ni (3600 – ϕ1 − ϕ 2 ). Kiirte suuna täpsemaks määramiseks kasutatakse pikksilmas niitristi, mille vertikaaljoon tuleb seada kohakuti kollimaatori pilu kujutisega ja nagu öeldud, peab see jääma paralleelseks pilu kujutisega. Kiirte suund määratakse alguses jämedalt, milleks pööratakse alust koos pikksilmaga
seejärel nõjas fikseerida. Mikroskoobi teravustamine Nõjase fikseerimine Mikmmmm töölauda koos sellele kinnitatud detailiga saab nihuta- Mikroskoobi a b da rist- ja pikikruvikuga. cNihutuse suuruse määramiseks tuleb seada niitristi üks niit ühtivaks detaili ühe servaga ja võtta kruvikult lugem, siis nihutada detaili niitristi all kuni seesama niit ühtib kontuuri vastasservaga ja võtta jälle lugem. Lugemite vahe ongi nende kahe serva vaheline kaugus. Töölaua nihutamine ristisihis Töölaua nihutamine pikisihis Enne keerme mõõtmist tuleb selle telg seada ühtivaks niitristiga. Selleks tuleb niitristi üks niit (punktiirjoonega) viia ühtivusse keerme välisläbi- mõõduga kogu keerme pikkusel. Selleks tuleb keerata nii kruvikuid, kui ka okulaarmõõtepea kruvi 27 ja töölaua ülemise plaadi pööramise kruvi.
punkti. Juhul kui vertikaalniit eemaldub punktist, tuleb justeerimiseks okulaari koos niitristiga pöörata, vabastades veidi okulaarituubuse kinnituskruvisid. Justeerimata vertikaalniidi puhul tuleb viseerida ainult niitristi keskpunktiga. 4.Viseerimistelg peab olema risti horisontaalteljega (KKHH) Kontrolliks viseeritakse RV asendis instrumendi horisondi kôrgusel asuvale punktile ja tehakse lugem. Sama korratakse pikksilma asendis RP. Kui keskmiste lugemite vahe on täpselt 180 o, siis on nôue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis. Keskmiste lugemite vahe vôrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1±180o)+(RV2-RP2±180o)/4. Lubatud viga 1'-2'. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemi tegemise skaalale lugem RV- c vôi RP+c, tulemusena on niitristi keskpunkt punktilt ära nihkunud
m1 – liiva ja anuma mass [g] m – anuma mass [g] V – anuma maht [cm3] Katsetulemused on toodud Tabelis 7.1. 6.2 Liiva näiva tiheduse määramine Näivatiheduse määramisel elimineeritakse puistematerjalide vahele jäävate tühikute ruumala. Liiva kaaluti 200 g. See liiv puistati 500-ml mensuuri, kuhu oli eelnevalt valatud 300 ml vett. Liivaterade ruumala määrati mensuuri lugemite vahena. Liivaterade tihedus arvutati valemist (2). 2 Valem (2) m L 1000 V2 V1 γL – liiva näivtihedus [kg/m3] m – proovi mass [g] V1 – vee ruumala mensuuris [cm3] V2 – vee ja liiva ruumala mensuuris [cm3]
4. Katsemeetodid 4.1 1-liitrilisse silindrisse puistatakse 10 cm kõrguselt liiva terasid, mis on väiksemad kui 5mm. Pärast silindri täitumist lükatakse silindrilt kuhi maha ja kaalutakse kaalul. Puistetihedus arvutatakse valemiga nr. 1. 4.2 Liiva terade tiheduse määramine. Kaalutakse 200-300g liiva, mille liiva terad jäävad alla 5mm. Seejärel pannakse 500 milliliitrisesse mensuuri 250ml vett ning siis lisatakse liiv. Liivaterade ruumala määratakse mensuuri lugemite vahena. Liivaterade tihedus arvutatakse valemiga nr.2. 4.3 Liiva tühiklikus arvutatakse puistetiheduse ning liiva terade põhjal valemiga nr.3. 4.4 Kuivatatud liiva võetakse 2kg sõelutakse sõelaga avadega 8 ja 4mm. Jäägid kaalutakse ja arvutatakse kruusaterade hulk(4…8) liivas osajääk valemiga . Läbi 4mm sõelaläinud liiv kaalutakse 200g ja sõelutakse sõeladega, mille avad on 4;2;1;0,5;0,25;0,125mm. Jäägid sõeltel kaalutakse. Osajäägid arvutatakse valemiga
m - m1 0L = V * 1000 (Valem 1) m-anuma mass [g] ml - liiva ja anuma mass [g] V- anuma maht [cm3] 5.1 Liiva terade tiheduse määramine Võetakse 200-300g liiva, mis on eelnevalt kuivatatud ja sõelutud sõelal avaga 5mm. Liiv pannakse 500l mensuuri, millesse on eelnevalt valatud 250ml vett. Liivatera ruumala määratakse mensuuri lugemite vahena ning liiva terade tihedus L [kg/m3] arvutatakse valemist 2. Liiva terade tihedust määratakse kaks korda ning kahe mõõtmise tulemus ei tohi erineda rohkem kui 20 kg/m3. m L = V 1- V 2 * 1000 (Valem 2) m-proovi mass [g] V1- vee ruumala mensuuris [cm3] V2- vee ja liiva ruumala mensuuris [cm3] 5.3 Liiva tühiklikkuse arvutamine
20 kg/m3. Suurema erinevuse korral viiakse läbi veel kolmas katse. Valem 1. 0L = [ (m1 - m) / V] * 1000 [kg/m3] 0L liiva puistetihedus [kg/m3], m anuma mass [g], m1 liiva ja anuma mass [g], V anuma maht [cm3] 4.2 Liiva terade tiheduse määramine Liiva mis on läbinud sõela avaga 5 mm, kaalutakse 200 300 g. See liiv puistatakse 500 ml mensuuri, kuhu on eelnevalt valatud 250 ml vett. Liivaterade ruumala määratakse mensuuri lugemite vahena. Liivatera tihedus arvutatakse valemiga (2). Erinevus kahe katse vahel ei tohi olla suurem kui 20 kg/m3 Valem 2. L = [ m / (V2 V1) ] * 1000 [kg/m3] L - liiva terade tihedus [kg/m3], m proovi mass [g], V 1 vee ruumala [m3], V2 vee ja liiva ruumala [m3] 4.3 Liiva tühiklikkuse arvutamine Liiva tühiklikkus arvutatakse puistetiheduse ning näiva tiheduse põhjal valemiga (3) Valem 3. pL = [1 (0L / L)] * 100%
Anuma mass koos liivaga = 7475 g Liiva = 6850 g = 1370 [kg/m3] Arvutan killustiku keskmise puiste tiheduse: = 1360 [kg/m3] 3.2 Liiva näiva tiheduse (terade tiheduse) määramine Kuivatatud liiva keskmisest proovist, mis on läbinud sõela avaga 5 mm, kaalutakse 200-300g. See liiv puistatakse 500-ml mensuuri, kuhu on eelnevalt valatud 250 ml vett. Liivaterade ruumala määratakse mensuuri lugemite vahena. Liiva näiv tihedus [kg/m3] arvutatakse valemist: 1000 [kg/m3] kus G- proovi mass [g] V1- vee ruumala mensuuris [cm3] V2- vee ja liiva ruumala mensuuris [cm3] G (proovi mass) = 266 g V1 (vee ruumala) = 250 cm3 V2 (vee ja liiva ruumala mensuuris) = 350 cm3
kasvamise järjekorra alusel. Samal viisil viseeritakse eesmisele punktile C ja tehakse vajalikud lugemid (2). Nurk (2) - (1)=(3). = lugem C lugem A. See on esimene poolvõte. Teiseks poolvõtteks keeratakse pikksilm üle seniidi, viseeritakse alidaad ja pöörates päripäeva viseeritakse järgemööda eesmisele A ja tagumisele C punktile ning tehakse vajalikud lugemid (4) ja (5). Nurk (5) - (4)= (6). Tulemeid (3) ja (6) tuleb omavahel võrrelda. Lugemite vahe ei või olla suurem kui kahekordne lugemi täpsus: (6) - (3)<=2' 19. Teodoliidi teljestik, nõuded teodoliidi telgedele. ZZ - põhitelg (limbi ja alidaadi pööramistelg) VV - silindrilise vesiloodi telg (vesiloodi ampulli nullpunkti puutuja) HH - pikksilma pööramistelg (horisontaaltelg) OK - pikksilma viseerimistelg. VV - vert. telg, horisontaalringi alidaadi pööramistelg, teodoliidi põhitelg V'V' - horisontaallimbi pööramistelg
kasvamise järjekorra alusel. Samal viisil viseeritakse eesmisele punktile C ja tehakse vajalikud lugemid (2). Nurk (2) - (1)=(3). = lugem C lugem A. See on esimene poolvõte. Teiseks poolvõtteks keeratakse pikksilm üle seniidi, viseeritakse alidaad ja pöörates päripäeva viseeritakse järgemööda eesmisele A ja tagumisele C punktile ning tehakse vajalikud lugemid (4) ja (5). Nurk (5) - (4)= (6). Tulemeid (3) ja (6) tuleb omavahel võrrelda. Lugemite vahe ei või olla suurem kui kahekordne lugemi täpsus: (6) - (3)<=2' 19. Teodoliidi teljestik, nõuded teodoliidi telgedele. ZZ - põhitelg (limbi ja alidaadi pööramistelg) VV - silindrilise vesiloodi telg (vesiloodi ampulli nullpunkti puutuja) HH - pikksilma pööramistelg (horisontaaltelg) OK - pikksilma viseerimistelg. VV - vert. telg, horisontaalringi alidaadi pööramistelg, teodoliidi põhitelg V'V' - horisontaallimbi pööramistelg
3 m liiva mass [g] V anuma maht [cm3] Puistetihedus määrati kaks korda, võttes iga kord uus kogus liiva. Erinevus kahe määramise vahel ei tohtinud olla suurem kui 20 kg/m3. 5.2 Liiva terade tiheduse määramine Liiva kaaluti 200-300 g. See liiv puistati 500-ml mensuuri, kuhu oli eelnevalt valatud 250 ml vett. Liivaterade ruumala määrati mensuuri lugemite vahena. Liivaterade tihedus arvutati valemist (2). L=m/(V2-V1)*1000 (2) L liiva terade tihedus [kg/m3] m proovi mass [g] V1 vee ruumala mensuuris [cm2] V2 vee ja liiva ruumala mensuuris [cm2] 5.3 Liiva tühiklikkuse arvutamine Liiva tühiklikkus arvutati puistetiheduse ning näiva tiheduse põhjal valemist (3). PL=(1- 0L/ L)*100% (3)
Valem 1: 0L = [ (m1 m) / V ] * 1000 0L liiva puistetihedus [kg/m3] m1 liiva ja anuma mass [g] m anuma mass [g] V anuma maht [cm3] 3.2 Liiva terade tiheduse määramine Kuivatatud liiva keskmisest proovist, mis on läbinud sõela avaga 5 mm, kaalutakse 200-300g. See liiv puistatakse 500 ml mensuuri, kuhu on eelnevalt valatud 250 ml vett. Liivaterade ruumala määratakse mensuuri lugemite vahena. Liiva terade tihedus arvutatakse valemiga (2) Valem 2: L = [ m / ( V2 V1) ] * 1000 L liiva näivtihedus [kg/m3] V2 vee ruumala mensuuris [cm3] V1 vee ja liiva ruumala mensuuris [cm3] m proovi mass [g] Erinevus kahe määramise vahel ei tohi olla suurem kui 20 kg/m3. Suuremate erinevuste korral viiakse läbi veel ka kolmas määramine ja arvutatakse keskmine aritmeetiline kahest lähimast
V Antud valemis m anuma mass(g), m1-liiva ja anuma mass(g) ning V- anuma ruumala, cm3. Puistetihedust peab määrama kaks korda ning nende kahe tulemuse vahe ei tohi olla suurem kui 20 kg/m3. 4.2 Terade tihedus Liiva terade tiheduse määramiseks tuleb eemaldada puistematerjalide vahele jäävate tühikute ruumala. 500 ml mensuuri valatakse 250 ml vett ning 200-300 g liiva. Liivaterade ruumala saab märata mensuuride lugemite vahena. Liivaterade tiheduse valem on m L= 1000 [kg/m3] V 2-V 1 Antud valemis m-proovi mass(g), V1- vee ruumala mensuuris(cm3) ning V2- vee ja liiva ruumala mensuuris(cm3) Ka siin ei tohi kahe katsetamise korral vahe suurem kui 20 kg/m3. 4.3 Liiva tühiklikkus Liiva tühiklikkus leitakse puistetiheduse ja näiva tiheduse põhjal. Liiva tühiklikkuse valem on 0 L (
Lati musta poole sentimeeter- ja detsimeeterjaotised algavad täpselt lati tallast, kuid punase poole detsimeeterjaotised on tavaliselt nihutatud lati talla suhtes 13 ...15 mm. Ühtlasi ei alga punase poole detsimeeterjaotiste numeratsioon mitte nullist, vaid muust arvust, tavaliselt (47- st või 48 st). Et lugemid latilt võetakse alati millimeetrites, siis saame punase poole lugemi musta poole lugemi suhtes suurema 4687 või 4787 mm võrra. Seda lugemite vahet nim. lati konstandiks, mis aitab kontrollida nivelleerimise tulemusi igas seisupuntkis, sest kõrguskasvu saame arvutada kaks korda, ühe korra lattide musta poole ja teist korda lattide punase poole lugemite järgi. Detsimeetrite numbrilised väärtused on kirjutatud latile õigetpidi või ümberpööratult, sõltuvalt nivelliiri pikksilmas saadavast kujutisest. Kui nivelliiri pikksilm annab õige kujutise,
Anuma mass anuma mass, Anuma Liiva Katse nr m, g m maht V, cm³ puistetihedus 1 1748,8 1543 2 215,6 1759,2 993,5 1554 7.2 Liiva terade tiheduse määramine Kuivatatud liiva proovist, mis on läbinud sõela avaga 5 mm, kaalutakse 200-300 g liiva. See liiv puistatakse 500-ml mensuuri, kuhu on varem valatud 250 ml vett. Liivaterade ruumala määratakse mensuuri lugemite vahena. Erinevus kahe määramise vahel ei tohi olla suurem kui 20 kg/m³. Liiva terade tihedus L [kg/m³] arvutatakse: (2) 2 Kus m proovi mass, g V1 vee ruumala mensuuris, cm³ V2 vee ja liiva ruumala mensuuris, cm³ Näide m = 244 g V1 = 250 ml V2 =345 ml
asendi muutmisel 180° võrra, muutub sellise kompensaatori kui teraviku dispersioon nullist kuni üksikprisma kahekordse dispersioonini. Kui uuritava aine ja prisma P2 dispersioon ei ületa kompensaatori dispersiooni, siis saab prismad K1 ja K2 asetadapikksilma objektiivi ette nii, et kaob värviline riba pikksilma vaatevälja ning ühtlaselt valgustatud ja valgustamata osa vahelt. Kompensaatori prismadega ühendatakse trummel, millelt kompensatsiooni olukorras tehtud lugemite põhjal saab vastavate tabelite abil arvutada uuritava vedeliku keskmise dispersiooni nF-nC. Kompensaatoris kasutatavad otsevaateprismad nn. Amici prismad (joonis 52), on kokku liimitud väikese (kroon) ja suure (flint) murdumisnäitajaga kolmetahulistest prismadest. Seejuures on komponentprismade murduvad nurgad ja murdumisnäitajad valitud nii, et naatriumi spektri D- joonele vastava lainepikkusega kiir väljuks prismast esialgses suunas, st. D-joonele vastav kiir
magnetilist vastasmõju. Satelliidi stabiliseerimine ja orientatsioon toimuvad automaatreziimil, sest antennide vale asendi korral ei ole kindel, kas maapealse tugijaamaga õnnestuks ühendust saada. 4. Peale satelliidi stabiliseerimist peetakse esimene sideseanss maapealse juhtimiskeskusega ning edastatakse satelliidi sensorite lugemid. Nende põhjal kontrollitakse, kas kõik süsteemid toimivad nagu ette nähtud. Kõigi parameetrite positiivsete lugemite alusel võetakse vastu otsus põhieksperimendi alustamise kohta. Selleks käivitatakse vastav programm magnetpoolide juhtimiseks, mille kaudu vastasmõju tõttu maa magnetväljaga saavutatakse kontrollitud pöörlemine ümber satelliidi antennide telje kiirusega üks pööre sekundis. Sidekeskuse vahendusel tehakse satelliidile diagnostikat ja vajadusel laetakse tarkvarauuendusi. 5
- Leitakse kordinaatide abil kahekordne pindala Pindalade määramine graafiliselt, ehk määratakse nt. Plaanil oleva maatüki pindala kujundite järgi (kolmnurgad, ristkülikud, ruudud jne) - Pärast liidame maatüki pindalad kokku, kuid see ei ole väga täpne. Pindala me tavaliselt arvutame ha, mis on 100x100m ehk 1ha on 10 000 m2. 1km2 = 1 000 000 m2 ehk see on 100ha. 6. Nivelleerimine ühes jaamas. Lati lugemite järgi kõrguskasvu arvutamine. Punkti kõrguse leidmine. (Laboratoorne töö nr 7) Niveliir asetatakse kahe mõõdulati vaheleja pannakse loodi, see on väga tähtis, sest muidu ei ole niveliirist minev sirge enam risti maapinnaga. Selleks et saada kõrguskav, peame me teadma ühe punkti kõrgust( olgu see siis kõrgema või madalama punkti kõrgus). Peame võtma tgasivaate ja edasivaate kõrgused latilt ja
valikul sai lähtutud sellest, et käsitletav teema on huvitav, avastamisruumi palju ning saadud teadmisi saab kasutada erialases väljaõppes. Käesolevas refereeringus tutvustatakse järgnevaid geodeetilisi instrumente: diginivelliir, GPS-seadmed, elektrontahhümeeter ja laserskanner. 3 1. Diginivelliir Digitaalnivelliirid on kompensaatori, sisearvuti ja mäluga. Need võimaldavad automaatset lugemite tegemist koodlatilt, kõrguskasvu arvutust ja salvestamist. Lisaks saadakse ka kaugus instrumendist latini, samuti on võimalik automaatne projektkõrguste väljamärkimine. Digitaalselt määratud kõrguskasvude täpsus on sõltuvalt nivelliiri tüübist 0,3 kuni 0,5 mm 1 km pikkuse käigu nivelleerimisel otse- ja vastassuunas. Tänapäeval kasutuses olevad nivelliirid on näiteks Leica Sprinter 250M ja Trimble DiNi. [1,lk 21] 1.1 Leica Sprinter 250M
kui teraviku dispersioon nullist kuni üksikprisma kahekordse dispersioonini. Kui uuritava aine ja prisma P2 dispersioon ei ületa kompensaatori dispersiooni, siis saab prismad K 1 ja K2 asetadapikksilma objektiivi ette nii, et kaob värviline riba pikksilma vaatevälja ning ühtlaselt valgustatud ja valgustamata osa vahelt. Kompensaatori prismadega ühendatakse trummel, millelt kompensatsiooni olukorras tehtud lugemite põhjal saab vastavate tabelite abil arvutada uuritava vedeliku keskmise dispersiooni nF-nC. Kompensaatoris kasutatavad otsevaateprismad nn. Amici prismad (joonis 52), on kokku liimitud väikese (kroon) ja suure (flint) murdumisnäitajaga kolmetahulistest prismadest. Seejuures on komponentprismade murduvad nurgad ja murdumisnäitajad valitud nii, et naatriumi spektri D-joonele vastava lainepikkusega kiir väljuks prismast esialgses suunas, st
Viseeritakse tagumisele latile, seatakse elevatsioonikruvist silindrilise vesiloodi mull keskele ja tehakse lugem a, viseeritakse eesmisele latile, seatakse uuesti mull keskele ja tehakse lugem b. Muudetakse nivelliiri kõrgust (ca 20 cm) ja korratakse eelnevat protseduuri. Arvutused h1 = a1 - b1 , h2 = a 2 - b2 nende erinevus maksimaalselt 5 mm. Mõnikord töötatakse ainult ühel horisondil, kuid siis ei saa avastada tekkinud lugemite vigu. Seepärast on kasulik kasutada kahte horisonti. Nivelleerimiskäigud Tavaliselt on vaja määrata korraga mitme punkti kõrgused, näiteks ehitusplatsi uued reeperid, sellisel juhul rajatakse nende punktide vahele nivelleerimiskäigud. Eesti territooriumil on riiklik kõrguseline põhivõrk, mille reeperid on maastikul või ehitistes kapitaalselt kindlustatud. Nende reeperite kõrgused on määratud Balti kõrgussüsteemis BK77. riiklikke
m liiva mass [kg] V anuma maht [m3] Puistetihedus määrati kaks korda, võttes iga kord uus kogus liiva. Erinevus kahe määramise vahel ei tohtinud olla suurem kui 20 kg/m3. Saadud tulemused on näidatud tabelis 8.1.1. 7.2 Liiva terade tiheduse määramine Liiva kaaluti 200-300 g. See liiv puistati 500-ml mensuuri, kuhu oli eelnevalt valatud 250 ml vett. Liivaterade ruumala määrati mensuuri lugemite vahena. Tabel 8.2.1 on toodud katsete tulemused. Liivaterade tihedus arvutati valemist (2). L=m/(V2-V1)*1000 (2) L liiva terade tihedus [kg/m3] m proovi mass [kg] V1 vee ruumala mensuuris [m2] V2 vee ja liiva ruumala mensuuris [m2] 7.3 Liiva tühiklikkuse arvutamine Liiva tühiklikkus arvutati puistetiheduse ning näiva tiheduse põhjal valemist (3).
Samal viisil viseeritakse eesmisele punktile C ja tehakse vajalikud lugemid (2).Nurk (2)- (1)=(3). =lugemC-lugemA. See on esimene poolvôte. Teiseks poolvôtteks keeratakse pikksilm üle seniidi, viseeritakse alidaad ja pöörates päripäeva viseeritakse järgemööda eesmisele A ja tagumisele B punktile ning tehakse vajalikud lugemid (4) ja (5). Nurk (5)- 1 (4)= (6). Tulemeid (3) ja (6) tuleb omavahel vôrrelda. Lugemite vahe ei vôi olla suurem kui kahekordne lugemi täpsus: (6)- (3)<=2' 4.Joone orienteerimine. Joone orienteerimine tähendab joone suuna määramist meridiaani suhtes. Orienteerimisel kasutatakse järgmisi nurki: asimuut,rumb(0-90o),direktsiooninurk,tabelinurk (0-90o). Asimuut on horisontaalnurk, mida mõõdetakse meridiaani põhjasuunast päripäeva kuni antud jooneni(0o-360o ). Asimuut on kas magnetiline või geograafiline (tõeline). N N B AA;B
Katsetulemused on toodud tabelis g.t. 7.2. Liiva niiiva tiheduse mEliramine N6ivtiheduse ehk terade tiheduse m?iiiramisel elimineeritakse puistematerjalide vahele j6iivate tiihikute ruumala. Naivtihedus ei arvesta kivimi terade sees olevate tiihikuie mahtu. Liiva niiiva tiheduse mii2iramiseks kaalutakse 250 g liiva, mis on l?ibinud s6ela avaga 5 mm. See liiv puistatakse 500-ml mensuuri, kuhu on eelnevalt valatud 250 ml vett. Liivaterade ruumala miiiiratakse mensuuri lugemite vahena. Erinevus kahe mii6ramise vahel ei tohi ola suurem kui 20 $. sur.r*ate erinevuste korrar viiakse lflbi veel kolmas m?iiiramine ja arvutatakrc urit*.#iline keskmine kahest liihimast fulemusest. Liiva terade tihedus O, l#l arvutatakse jiirgmiselt: p,=ffi.looo l#1,vatem2, kus m - proovi mass, [g] V1 - vee ruumala mensuuris, [cm3]