Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Kaevupumba juhtimine ". Need materjalid aitavad sul teemat sügavamalt mõista.
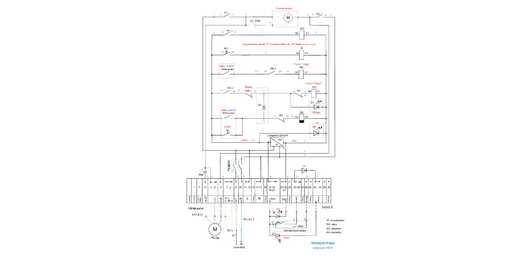
rõhuandur, toide, reset,,MAX. (5atm)" RE2 Rõhuandur RE1.2 10 21 24 18 A2 A1
Pump:" Välja" ,,MAX. (5atm)" RE2 Rõhuandur RE1.2 10 21 24 18 A2 A1
LELOL iseseisev töö Nr. 3 iseseisev töö Õppeaines: Hüdro- ja pneumoseadmed Mehaanikateaduskond Õpperühm: MI-31B Juhendaja: lektor Samo Saarts Tallinn 2015 ÜLESANNE 1. Antud: A=25 m – vedeliku samba kõrgus P1=4 bar = 4*105 Pa – välisrõhk ρ=950 kg/m3 - tihedus g=9.81 m/s2 – gravitatsioon Leida: P2 - anuma põhjas olev rõhk F - jõud kui anuma põhjapindala on S=2 m2 Lahenduskäik: 1. Arvutan anuma põhjas oleva rõhu P2. P=P1+A*g* ρ P2=4*105 + 25*9.81 *950=632987.5 Pa=6.329875 bar 2. Arvutan jõu F. Pa=N/m2 632987.5 N/m2 / 2 m2=316493.75 N Vastus: P2=6.329875 bar F=316493.75 N ÜLESANNE 2. Antud: d=18 mm=0.018m – toru sisediameeter v=3.5 m/s – vedeliku kiirus l=130 m – toru pikkus υ=35 mm2/s=35*10-6 m2/s – kinemaatiline viskoossus tegur ρ=900 kg/m3 - tihedus Σξ=30 - kohalike takistuste summa Leida: p1 2 - Rõhukadu barides Lahend
SISUKORD 1. Laboritööde tegemise kord ja ohutustehnika................................................5 2. Laboritöö nr. 1...................................................................................6 Elektritakistuse mõõtmine............................................................................................6 3. Laboritöö nr. 2................................................................................. 7 Ohmi seaduse katseline kontrollimine (ahela osa kohta...............................................7 3. Laboritöö nr. 3...................................................................................8 Vooluallika emj. (allikapinge) ja sisetakistuse määramine..........................................8 5. Laboritöö nr. 4...................................................................................9 Kirchoffi II seaduse katseline kontrollimine.....................................
Analüütiline pindala määramine punkti nr. Xi Yi Yi+1-Yi-1 Xi-1-Xi+1 Xi(Yi+1-Yi-1) Yi(Xi-1-Xi+1) 1 6399587,577 653459,044 561,49 -592,02 3593298029,02 -386862130,15 2 6399624,480 653935,599 396,85 320,35 2539671776,01 209488923,08 3 6399267,226 653855,891 -85,60 744,48 -547770875,28 486782633,73 4 6398880,000 653850,000 -481,78 234,77 -3082858805,28 153503056,80 5 6399032,458 653374,110 -390,96 -707,58 -2501740133,65 -462312492,63 SUMMA 0,00 0,00 599990,83 599990,83 Pkoord=2P1/2*10000=599990,83/2*10000=30,00ha Magistraaljoone tagune pindala kujundi nr. Ja pindala arvutamise ai
Cat. No. W317-E1-11 SYSMAC CPM1A Programmable Controllers OPERATION MANUAL CPM1A Programmable Controllers Operation Manual Revised October 2007 iv Notice: OMRON products are manufactured for use according to proper procedures by a qualified operator and only for the purposes described in this manual. The following conventions are used to indicate and classify precautions in this manual. Always heed the information provided with them. Failure to heed precautions can result in injury to people or dam- age to property. ! DANGER Indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury. Additionally, there may be severe property damage. ! WARNING Indicates a potentially hazardous situation which, if not avoided, could result in death or serious inju
ERIALA Puidust kodaratega rattad 2000aastat e.m.a. Traatkodaratega rattad 1800aastate paiku 1950.aastal asendati autode traatkodaratega rattad metallratastega 1769.a auruvanker (Nicolas Cugnot) Max. 5km/h 1790.a jalgratas (M.de Sivrac) 1795.a hoburaudtee (Inglismaal) 1820.a aurusõidukite ehitamine 1845.a õhkrehvid (Robert William Thomson) 1883.a neljarattalist jalgratast meenutav aurusõiduk (auto eelkäija) 1895.a esimene bensiinimootor 1899.a rajati metallurgia laboratoorium 1910.a maailma esimene V-8 mootor 1885.a esimene mootorratas (Gottlieb Daimler) 1890.a esimene auto mille mootor paiknes ees(Rene Panhard ja Emile Levasson) 19.saj algus Esimesed bussid(sõna buss on tuletatud ladina-keelsest sõnast omnibus-kõigile) 1908.a Henry Ford rajs tehase automudeli T masstootmiseks 1894.a esimene autovõidusõit Pariis-Rouen (max. Kiirus 12km/h) 1955.a Le Mans'i võidusõit (Nõudis 84 inimelu ja vigastatuid üle 100-a) Maailma piki
SS.r-i jl i i I i I o ?We0;/^, a-- c-!--*Lo- clon'u!.*0A*n w+*n,*.*.-- " 0 o U0.+U^^- *f^r** /Lp^-,^-;* ^rE^J" U"^!rc-A^/-o- tpt^^,t t- kZzy"a- t^"M^h-r"^' G,tt- y,n**t-aoJ*t bqt'^'&o^---"^t 9 Nt"-"&a^- ".-&J t/^o'14^-^4^4y" Irrnqrlrr'ta!. 0"X^ !Ul^t- wta,Lt*ua*U,v(, g ^ ao -/" U i r/oh-{L la r#a^o!"nd;*. al--& Vou^e..^.!r}nr-),- *.b- N*tAtr"k ,/^o,fur.iaL fv[ nlto^ d, oc< cl'*r,Q'a* . -u H^r,vr;
4. AJAMITE JÕUAHELATE LÜLITUSED Kuidas ühendatakse elektrimootori mähised toiteallikaga? Lülitid, releed ja kontaktorid, programmeeritavad kontrollerid Kuidas toimub mootorite kiiruse reguleerimine? Impulss- või takistusreguleerimine? Pooljuhtmuundurite skeemid 4.1. Mootorite lihtsad käivitus- ja kaitseahelad Asünkroonmootori otselülitus toitevõrku. Suurt osa asünkroonmootoritest lülitatakse otse toitevõrku. Lülitusseadmeks võivad olla kas koormus või kaitselülitid. Sagedaste lülituste korral on lülitusseadmeks tavaliselt surunupplülititega juhitav kontaktor. Sõltuvalt vajadusest võib mootor pöörelda kas ühes suunas, või tuleb selle pöörlemissuunda muuta. Ühesuunalise pöörlemisega mootori otselülitus toitevõrku on näidatud joonisel 4.1. Mootori ja juhtnuppude toiteahelad pingestatakse lülitiga Q, milleks tavaliselt on kaitselüliti. Mootori käivitamine toimub vajutamisega surunupplülitile SK, mis sulgeb kontaktori lülitusmagneti mähise K voolua
c ' ,t-r,(r l t,{ -' i == 9,tt KONTROL LTO{) nr. b N;,";, ...T."..S-cg.ff x,,,"ur, .....F.t].-n... VONKUMISFi ja LAINED 05. detsernber2005 / . .. l.1. Harmoonj ,eit ionk va punkti v6nke[lnplitrrud orr 8 cm, nurksagedu,s 4 s-1, alffaas
c ' ,t-r,(r l t,{ -' i == 9,tt KONTROL LTO{) nr. b N;,";, ...T."..S-cg.ff x,,,"ur, .....F.t].-n... VONKUMISFi ja LAINED 05. detsernber2005 / . .. l.1. Harmoonj ,eit ionk va punkti v6nke[lnplitrrud orr 8 cm, nurksagedu,s 4 s-1, alffaas
€; ka F- ftiEZSg =o;5-E+=i3"- -€s t..;.F s q;:= ')'4= ft€ '9= :*i J y=B?Tii itE nt =:> 3 ?- 2-.VG !E'ii=:;riVf i: - i-Yg=- E 5 Et F>^Y,= -,r d s'ir& -c -- == =Ei==': E-=F.*:-€=v2.2; = =.g ,-J; = Z d.i:X:G€{'=13ag4. i-- -,-Yt EglPcElit'=qro- = g r^ 3 - l, Z T >a -c.- tr
Loengukonspekt õppeaines MASINAMEHAANIKA Koostanud prof. T.Pappel Mehhatroonikainstituut Tallinn 2006 2 SISUKORD SISSEJUHATUS 1. ptk. MEHHANISMIDE STRUKTUURITEOORIA 1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid. Liigliikuvused 1.2.1. Vabadusaste 1.2.2. Liigseondid. Liigliikuvused. 1.3. Mehhanismide struktuuri sünteesimine 1.3.1. Struktuurigrupid 1.3.2. Kõrgpaaride arvestamine 1.3.3. Kinemaatiline skeem. Struktuuriskeem 2. ptk. MEHHANISMIDE KINEMAATILINE ANALÜÜS 2.1. Eesmärk. Algmõisted 2.2. Mehhanismide kinemaatika analüütilised meetodid
Tallinna Tehnikaülikool Keemiatehnika instituut Laboratoorne töö õppeaines Gaaside ja vedelike voolamine HÜDRODÜNAAMIKA ALUSED Õpilane: Õppejõud: Jelena Veressinina Õpperühm: KAKB Sooritatud: 15.05.2015 Esitatud: Tallinn 2015 Teooria 1. Vedelike voolamine torustikes Torustikus vedeliku või gaasi liikumapanevaks jõuks on rõhkude vahe, mida on võimalik tekitada pumbaga, kompressoriga või vedeliku nivoo tõstmisega. Teades hüdrodünaamiks põhiseadusi on võimalik leida rõhkude vahe, mis on vajalik selleks, et teatud kogus vedelikku või gaasi panna liikuma etteantud kiirusega ning järelikult ka vedeliku voolamiseks vajaminevat energiakulu. Samuti on võimaliklahendada ka pöördülesannet- leida ettean
jõud / moment. Soojuse hajutamine (Heat dissipation) – suurim soojuse hajutamise võimsus püsirežiimil. Kiiruse karakteristik (Speed characteristics) – Jõu / momendi ja kiiruse tunnusjoon. Tühijooksukiirus (No load speed) – töökiirus koormusvabas olekus. Sagedusvahemik (Frequency response) – Sageduse vahemik, milles väljund reageerib sisendile korralikult. Kasutatav sirgjooneliselt liikuvatel täituritel. Toide (Supply) – toite tüüp (elektrivool, suruõhk jm), faaside arv, pinge, vool, sagedus. Aga lisaks mainitud kriteeriumidele on määrava tähtsusega ülekandemehhanismi valik. Näiteks kui valitakse ülekandemehhanismiks hammasrattaülekanne, võib lõtku tekkimine mõjutada täituri täpsust. Sama kehtib näiteks ka rihmülekande puhul, kui rihm peaks hakkama libisema. 12 3
5.11. Saehammaspingegeneraator.................................................................................................. 113 5.12. Selektiivvõimendid............................................................................................................... 115 5.13. Siinusvõnkumise generaatorid.............................................................................................. 118 5.14. Elektronaparatuuri toide (alaldid, silufiltrid, pingekordistid, pingestabilisaatorid).............. 122 5.15. Fitrid (liigitus, ideaal- ja reaalfiltrid, aktiivfiltrid)................................................................ 134 6. Digitaalelektroonika põhilülitused................................................................................................. 138 6.1. Nulli ja ühe esitamine.......................................
Küsimus 1. 1. Pumpade kasutusalad Pümba tööd iseloomustavad järgmised parameetrid: M manomeeter näitab rõhku selles paigas, kus ta ise on (sest manomeetri toru on vett täis) Rõhk pumba survetorus p = M+ zm , kus zm on kõrgusvahest põhjustatud rõhk. V vaakum ehk rõhk imitoru selles punktis kuhu vaakummeeter on ühendatud. Pumpade tööparameetrid. Pumba tööd iseloomustavad järgmised parameetrid: 1. Imemiskõrgus hi (m), 2. Kavitatsioon ja kavitatsioonivaru h (m) - ingliskeelses kirjanduses NPSH - net positive suction head ehk lubatav vaakum pumba Tööpiirkonnas, H lub/vac(m), 3. Tõstekõrgus e. surve ( H - m veesammast ), 4. Tootlikkus (jõudlus , vooluhulk) 5. Tarbitav võimsus P (kW), 6. Kasutegur ( absoluutarv või % ), 7. Tööorgani liikumissagedus n ( pöörlemis-või käigusagedus p /min või käiku/minutis ). 1 Küsimus 2. Pumba imemiskõrgus ja selle avaldamine Bernoulli võrra
TTÜ ehituskonstruktsioonide õppetool Raudbetoonkonstruktsioonide üldkursus I Vello Otsmaa Johannes Pello 2007.a Raudbetoonkonstruktsioonide üldkursus 1 SISSEJUHATUS 1 Raudbetooni olemus Raudbetoon on liitmaterjal (komposiitmaterjal), kus koos töötavad kaks väga erinevate oma- dustega materjali: teras ja betoon. Neist betoon on suhteliselt odav kohalik materjal, mis töö- tab hästi survel, kuid üsna halvasti tõmbel (betooni tõmbetugevus on 10-15 korda väiksem survetugevusest). Teras seevastu töötab ühteviisi hästi nii survel kui ka tõmbel, kuid tema hind on küllalt kõrge. Osutub, et survejõu vastuvõtmine betooniga on kordi odavam kui tera- sega, tõmbejõu vastuvõtmine on kordi odavam aga terasega. Siit tulenebki raudbetooni ma- janduslik olemus: võtta ühes ja samas konstruktsioonis esinevad survesisejõud v
TALLINNA TEHNIKAÜLIKOOL ELEKTRIAJAMITE JA JÕUELEKTROONIKA INSTITUUT ROBOTITEHNIKA ÕPPETOOL MIKROPROTSESSORTEHNIKA TÕNU LEHTLA LEMBIT KULMAR Tallinn 1995 2 T Lehtla, L Kulmar. Mikroprotsessortehnika TTÜ Elektriajamite ja jõuelektroonika instituut. Tallinn, 1995. 141 lk Toimetanud Juhan Nurme Kujundanud Ann Gornischeff Autorid tänavad TTÜ arvutitehnika instituudi lektorit Toomas Konti ja sama instituudi dotsenti Vladimir Viiest raamatu käsikirjas tehtud paranduste ja täienduste eest. T Lehtla, L Kulmar, 1995 TTÜ elektriajamite ja jõuelektroonika instituut, 1995 Kopli 82, 10412 Tallinn Tel 620 3704, 620 3700. Faks 620 3701 ISBN 9985-69-006-0 TTÜ trükikoda. Koskla 2/9, Tallinn EE0109 Tel 552 106 3 Sisukord Saateks
EESTI MEREAKADEEMIA Laevandusteaduskond TÜÜRIMEES MEREPRAKTIKA ARUANNE Victoria I Praktikakoht 24.04.2007 23.04.2009 Praktika algus ja lõpp Õppegrupp: LL- 41 Juhendas: Rein Raudsalu TALLINN 2009 Retsensioonid 2 Sisukord LAEVA ANDMED, VAHITEENISTUS, LASTIKÄSITLUS, PÜSTUVUS, MEREPRAKTIKA .........................................................................................................................................................5 Üldandmed ..................................................................................................................................5 Joonised .......................................................................................................................................7 Vahitüürimehe vastutus navigatsioonivahis .........................................................................
Tüüpilise elektriajami üldistatud plokkskeem on näidatud joonisel I.1. Joonise ülemine osa kujutab elektriajami jõuahelat, kuna alumine osa kujutab juhtimissüsteemi. Vastavalt sisendsignaalile juhivad alalisvoolu ja vahelduvvoolu 10 Ut k Jõu- M Tööma- Toide pooljuht- sin muudnur Juhtimine Juhtahel Tagasiside anduritelt Sisend Regulaator Joonis S.1
TTÜ EESTI MEREAKADEEMIA Laevanduskeskus Laevamehaanika lektoraat MEREPRAKTIKA ARUANNE Praktika algus: Kadett: Andrei Lichman Praktika lõpp: Rühm: MM42 Praktika koht: m/v Transdistinto Juhendaja: Jaan Läheb Tallinn 2016 2 3 SISUKORD 1.1. Üldandmed laeva kohta ................................................................................................... 6 1.2 Üldandmed laeva jõuseadme kohta .................................................................................. 7 1.2.1 Jõuseadmete tüüp ......................................................................................
2. tarbijaga paralleelselt konde-väikeste voolude jaoks. q1=1/(2fvCRt). Kui C-> pulsatsioone Ideaalselt sobib Schottky diood. Transistoril UBE umb.= 0,7V, UBK = USch.diood umb 0,5V; pole. Tühijooksul Rt=->Ud=U2m=U 22 UKE = UBE UBK umb 0,7 0,5 umb 0,2V 3. unipolaarne, pingega juhitav. transis liiguvad ühenimel-d laengukand-d kanalis, mille juhtivust 5. JOONIS2 Ajal. esimene. R = reset _ panema olekusse 0, S = set -> sättima, panema olekusse 1, muudetakse elektrivälja abil. Jagunevad:*pn siirdega *isoleeritud paisuga(1.sisseehit kanal Tõesus- ehk funktsioneermise tabeli parem esitus: 2.induts kanal) (tähistus Gate,Source,Drain üleval) n-kanaliga nool paisust sisse, p-vastupidi. Mida R S Q(t + deltat) deltat = aeg trigeri ümberlülitamiseks
LAEVA ABIMEHHANISMID SISSEJUHATUS: Abimehhanismide , laevaseadmete ja süsteemide tähtsus ja liigitamine . Laeva energeetikaseade koosneb: 1. Peamasin (ad). 2. Laeva abimehhanismid (AM). Peamasinad peavad kindlustama laeva käigu , abiseadmed kindlustavad peajõuseadmete ekspluateerimise ja muud laevasisesed vajadused. Seadmete tarbimisvõimsuste kasvuga , uute võimsate jõuseadmete ja juhtimisseadmete kasutuselevõtuga on abimehhanismide osatähtsus tunduvalt kasvanud - energeetikaseadmete jagamine pea ja abiseadmeteks on tinglik. Näiteks veemagestusseadmed ,mida varem kasutati aurukatla toitevee saamiseks , võis lugeda peaenergeetikaseadmete hulka , kasutatakse edukalt pikematel reisidel majandus ja joogivee saamisel. Seega võib abimehhanismid tinglikult liigitada . a. Peamasinat teenindavad abimehhanismid ( jahutusseadmed, õlitusseadmed , pumbad , kompressorid jne. ). b. Üldotstarbelised ( rooliseade, kuivendussüsteemid , ventiltsiooni- õhukonditsoneeri, küttesüsteem
TALLINNA TEHNIKAÜLIKOOL EHITISTE PROJEKTEERIMISE INSTITUUT Kursuseprojekt aines EER 0012 RAUDBETOONKONSTRUKTSIOONID I - PROJEKT ÜLIÕPILANE: JUHENDAJA: TÖÖ ESITATUD: TÖÖ ARVESTATUD: Tallinn, 20.. Sisukord 1 Plaadi arvutus 3 1.1 Koormused plaadile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.2 Talade m~ o~ otude valimine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.3 Arvutuslikud avad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.4 Plaadi sissej~ oud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1.5 Plaadi armatuuri dimensioneerimine . . . . . . . . . . . . . . . . . . . . . . . . . 4 1.5.1 Esim
EESTI MEREAKADEEMIA RAKENDUSMEHAANIKA ÕPPETOOL MTA 5298 RAKENDUSMEHAANIKA LOENGUMATERJAL Koostanud: dotsent I. Penkov TALLINN 2010 EESSÕNA Selleks, et aru saada kuidas see või teine masin töötab, peab teadma millistest osadest see koosneb ning kuidas need osad mõjutavad teineteist. Selleks aga, et taolist masinat konstrueerida tuleb arvutada ka iga seesolevat detaili. Masinaelementide arvutusmeetodid põhinevad tugevusõpetuse printsiipides, kus vaadeldakse konstruktsioonide jäikust, tugevust ja stabiilsust. Tuuakse esile arvutamise põhihüpoteesid ning detailide deformatsioonide sõltuvuse väliskoormustest ja elastsusparameetritest. Detailide pinguse analüüs lubab optimeerida konstruktsiooni massi, mõõdu ja ökonoomsuse parameetrite kaudu. Masinate projekteerimisel omab suurt tähtsust detailide materjali õige valik. Masinaehitusel kasutatavate materjalide nomenklatuur täieneb pidevalt, rakendatakse efekti
AUTOD-TRAKTORID I KORDAMIKÜSIMUSED 2013/2014.Õ.-A. 1. Sisepõlemismootorite tüübid Sisepõlemismootorid jagunevad: I. Kolbmootor , kogu tööprotsess toimub mootori silindris; II. Turbiinmootor, pidevatoimeline mootor, mis muundab mehaaniliseks tööks voolava auru, gaasi või vee kineetilist energiat (töötav aine voolab läbi düüside või juhtaparaadi tööratta kõverpinnalistele labadele ja paneb viimase pöörlema. 2. Sisepõlemismootorite liigid Turbiinmootorid jaotuvad: -1 1) auruturbiinmootorid (alates mõni kW... 1200 MW ja rohkem, n = 30 000 min ): e aktiivturbiinid, b) reaktiivturbiinid (töötava aine töö = voolsuuna muutumine + paisumise reaktiivjõud, mille osatähtsus on üle 50%) ; 2) gaasiturbiinmootorid ( võivad tar
selgitada, oma toitesüsteemi kasutamisel aga valida. See käib nii nor- maaltalitluses kasutatava toite kui ka turva- ja varutoite kohta. 3 Märkus. Need andmed on vajalikud, et arvutada kaitselülitite lahutusaega jms.; ka suurima hetkvõimsuse leidmiseks näiteks mootori- käivitusseadmete või keevitusseadmete kasutamisel, et pingekvaliteet säiluks. Eelpool toodud näitajaid tuleb rakendatavuse piires silmas pidada ka juhul, kui toide tuleb oma vooluallikast. See võib toimuda näiteks generaatori, muunduri, reserv- või hädatoiteallika või häirekaitsetrafo abil. Andmeid nende seadmete võimsuse, takistuse ja lühisvoolu kohta võib saada seadme tarnijalt. Häda- või varutoiteallika nõutavate omaduste vajadus tehakse kindlaks koos seadme tellija ja tarbijaga. Näiteks võib osutuda vajalikuks arvestada, et käit varutoiteallikast põhjustab suuri lühisvoole ning seetõttu ei võimalda võimsamate
Jõupuldi kinnitamine 1. Kinnitage jõupult vooluallika poolse posti külge, kasutades komplektis olevaid osi. Täitke paak hüdraulikaõliga. Paagi täitmiseks kasutatav lehter peab olema täiesti puhas. Vahetage õli kevadeti ja talviti. Hüdraulikavoolikute paigaldamine 1. Paigaldage hüdraulikavoolikud joonisel näidatud viisil. Jälgige hoolikalt, et voolikud on alati puhtad. 2. Juhtpult Tõstuki liikumist juhitakse juhtpuldist. Kui te tõstukit ei kasuta, lukustage juhtpult. Lülitage toide välja ja lukustamiseks keerake võtit.7 Kontrollige seadet kokku pannes, et silindri otsas olev hammasratas on korralikult silindrivarre otsas kinni. Tõstevarred Paigaldage tõstevarred joonisel näidatud viisil. Eraldi kotis olevad mutrid on mõeldud lukustusmutrid, mis tuleb kinnitada trosside pingutusmutrite peale. Liimige andmesilt juhtpuldi kohale.8 5. KASUTAMINE - Ärge lubage seadet kasutada alaealistel ega volitamata isikutel. - Kui sõiduk on paigal, rakendage käsipidur
6. ELEKTRIAJAMITE ÜLESANDED Tootmises kasutatakse töömasinate käitamiseks rõhuvas enamuses elektriajameid. Ka pneumo- ja hüdroajamid saavad oma energia ikka elektrimootoritega käitatavatelt kompressoritelt ja hüdropumpadelt. Elektriajam koosneb elektrimootorist ja juhtimissüsteemist, mõnikord on vajalik veel muundur ja ülekanne. Elektriajamite kursuse põhieesmärk on valida võimsuse poolest otstarbekas elektrimootor, arvestades ka kiiruse reguleerimise vajadust ja võimalikult head kasutegurit. Järgnevad ülesanded käsitlevad selle valikuprotsessi erinevaid külgi. 6.1. Rööpergutusmootori mehaaniliste tunnusjoonte arvutus Ülesanne 6.1 Arvutada ja joonestada rööpergutusmootorile loomulik ja reostaattunnusjoon. Mootori nimivõimsus Pn = 20 kW, nimipinge Un = 220 V, ankruvool Ia = 105 A, nimi- pöörlemissagedus nn = 1000 min-1, ankruahela takistus (ankru- ja lisapooluste mähised) Ra = 0,2 ja ankruahelasse on lülitatud lisatakisti takistu
võrdleb 0-ga Komparaator PTS (Schmitti trig)-Rakendamis pinge Ur=Utg+(U+valjmax-Utg)/ (R1+R2)*R1, lahti laskmine Ull=Utg-(U-valjmax+Utg)/(R1+R2)*R1 Hüstereesi laius Ug=Ur- Ull=R1/R1+R2*(U+valjmax+U-valjmax). 9pdf Pilet 9. 1. multivibraator OV baasil 2. ühetaktilise võimsusvõimendi efektiivsus 3. registrid 4. sünkroonne summeeriv loendur 5. alalisvooluvõimendi kokkupanekul tekkida võivad probleemid 1. *Sümmeetriline-(kuigi skeemis ple sümmeetriat). Kahepol sümm toide. Võimendi reziimis PTS, millega saab mitteinv-a sisendi jaoks kohaliku tugipinge allika. Enne t1->uo>0 siis Uvalj=U-valjm. Mitteinv-l sisendil. U(t)=-U-valjm, kus =R1/R1+R2 See pinge laeb kondet pol-sega -+. Ajal t1 inv-l sisendil U- on võrdne U+ mitteinv; uo->0->OV lülitub ümber Uvalj=U+valjm; U(t) vahetab märgi ja on nüüd U+valjm. See vastab uo<0 ning hakatakse kondet ümber laadima. ti=ln((U-mx+U+mx)/(U+mx-U-mx)); f=1/2ln…, kui U+mx=|U-mx|,
Digitaaltehnika Loengukonspekt Sisukord Sisukord...............................................................................................................................2 1. Arvusüsteemid..................................................................................................................4 1.1. Kümnendsüsteem......................................................................................................4 1.2. Kahendsüsteem.........................................................................................................4 1.3. Kaheksandsüsteem....................................................................................................4 1.4. Kuueteistkümnend süsteem......................................................................................4 1.5. Kahendkodeeritud kümnendsüsteem 8421...............................................................5 1.6. Kahendkodeeritud kümnendsüsteemid 2421 ja liiaga 3........
a binary search instead of just counting up or down by one. As shown in Figure 2.3, say we start with an input of 3v, using a 5v refer- ence. The successive approximation register would perform the conversion like this: Set MSB of SAR, DAC voltage = 2.5v. Comparator output high, so leave MSB set Result = 1000 0000 Set bit 6 of SAR, DAC voltage = 3.75v (2.5 + 1.25) Comparator output low, reset bit 6 Result = 1000 0000 Set bit 5 of SAR, DAC voltage = 3.125v (2.5 + .625) Comparator output low, reset bit 5 Result = 1000 0000 Set bit 4 of SAR, DAC voltage = 2.8125v (2.5 + .3125) Comparator output high, leave bit 4 set Result = 1001 0000 Set bit 3 of SAR, DAC voltage = 2.968v (2.8125 + .15625) Comparator output high, leave bit 3 set Result = 1001 1000