Alalduslülitusest saadav pinge on vähemal või enamal määral pulseeriva (muutuva) iseloomuga. Selle pulsatsiooni ehk lainelisuse vähendamiseks on silufilter, milline silub alaldatud pinge pulsatsiooni nõutava tasemeni.. Vahelduvvoolu võrgupinge stabiilsus ei ole väga kõrge, üldiselt on lubatud pinge kõikumine ±10%. Selline pinge kõikumine on mitmete elektroonikaseadmete toiteks liiga suur. Eriti kui on tegemist mõõtelülitusega. Nende pingekõikumiste vähendamist teostabki stabilisaator, kusjuures üldreeglina ta reageerib ka koormuse muutustele vältimaks koormusvoolu muutustest tingitud pinge kõikumisi. Mõnikord lisatakse toiteseadmele ka kiiretoimeline kaitselülitus, milline on enamasti stabilisaatoriga kokkuehitatud ja tema ülesandeks on kaitsta stabilisaatorit ülekoormuste ja lühiste korral. Sõltuvalt konkreetsest olukorrast võib üks või teine toodud plokkskeemi osa toiteseadmes puududa,
Alalduslülitusest saadav pinge on vähemal või enamal määral pulseeriva (muutuva) iseloomuga. Selle pulsatsiooni ehk lainelisuse vähendamiseks on silufilter, milline silub alaldatud pinge pulsatsiooni nõutava tasemeni.. Vahelduvvoolu võrgupinge stabiilsus ei ole väga kõrge, üldiselt on lubatud pinge kõikumine ±10%. Selline pinge kõikumine on mitmete elektroonikaseadmete toiteks liiga suur. Eriti kui on tegemist mõõtelülitusega. Nende pingekõikumiste vähendamist teostabki stabilisaator, kusjuures üldreeglina ta reageerib ka koormuse muutustele vältimaks koormusvoolu muutustest tingitud pinge kõikumisi. Mõnikord lisatakse toiteseadmele ka kiiretoimeline kaitselülitus, milline on enamasti stabilisaatoriga kokkuehitatud ja tema ülesandeks on kaitsta stabilisaatorit ülekoormuste ja lühiste korral. 22 Sõltuvalt konkreetsest olukorrast võib üks või teine toodud plokkskeemi osa toiteseadmes
Ja see moonutus avaldub kahel kujul: Impulsside külgmiste osade välja venimises, avaneb ja lühistab koormustakistuse.Vaadeldavaid piirikuid kasutatakse null tasemelisel piiramisel kuna mille tulemusel ristküllik impulsid muutuvad sarnaseks trapets impulsidega ja impulsi horisondi lülitused on väga lihtsad. Kasutatav diood valitakse toodud valemite alusel kusjuures tuleb arvestada et languses. Mis avaldub horisontaalse osa lineaarses langemises. Kuna impulss pinged on mitte parallel piiriku korral on piiravas reziimis mitte 0 vaid umbes 0,7V see on kasutatava dioodi sinuselised, siis võib vaadelda neid ka koosnevana harmoonilistest, see on erineva sagedusega sinus päripingelang sagely vajatakse ka 0st erineva piiramis nivooga lülitusi. komponentidest
täiendavaid elektrone, mis suurendab vastuvoolu ning sellise vastuvoolu suurenemine võib viia läbilöögini. 1.5 PN siirde sagedusomadused Päri- ja vastusuuna reziimide kiirel vaheldumisel toimub laengukandjate ümber paiknemine P osast N ossa ja vastupidi. On ilmne, et see protsess võtab aega, järeikult ei saa tekkida vastusuuna takistus hetkeliselt ning tulemusena tekib vastupingelise poolperioodi algul tavalisest suurem vastuvoolu impulss. (joonis) Kui mingis pooljuht seadises kasutatakse PN siirde põhiomadust siis tuleb arvestada et siirde sagedus omadustel on alati mingi piir, seejuures see piir võib olla erineb sõltuvalt sellest, millist tehnoloogiat on kasutatud siirde kujundamisel. 1.6 Pooljuht dioodid Pooljuht seadiseid mille põhiosaks on ühe siirdega pooljuht kristall nimetatakse pooljuht dioodideks. Seejuures jagunevad dioodid kahte suurde gruppi: 1. põhidioodid 2
helipea korral umbes 50mV jne. 4. Nimikoormustakistus see on tarbija ehk koormuse väärtus millele on võimendi on arvutatud. 5. Väljundvõimsus see on signaali sageduslik võimsus mida on võimeline võimendi arendama standardsel koormusel ilma, et signaali moonutused ületaksid lubatud määra. Helivõimendite puhul eristatakse keskmiste muusika võimsust ja impulss võimsust. 6. Dünaamiline diapasioon see on suht arv signaali ja oma müra suhtes võimendi on seda kvaliteetsem mida suurem on see arv kvaliteetsetel helivõimenditel peaks olema vähemalt olema 60dB. K=Uvälj/Usis ; Ki=Ivälj/Isis ; Kp=Pvälj/Psis ; Küld=K1*K2*...*Kn . Võimendus tegur võib olla ka antud log ühikutes KdB=20lg K või KP dB=10lg K ; Küld dB=K1dB+K2dB+...+Kn dB. 7
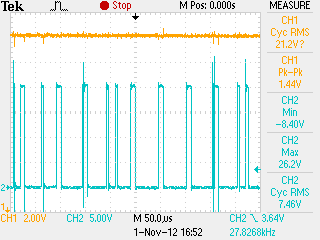
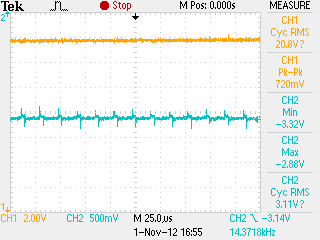
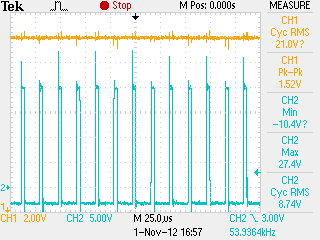
tekib kollektropinges võrreldes sisendpingega hilinemine. Selle hilinemise kestus on otseselt seotud kasutatavate transistoride sagedusomadustega. Mida kõrgem on transistori piirsagedus, seda lühem on nimetatud hilistumine. Teine probleem tuleneb sellest, et impulssidega kaasnevad siirdeprotsessid, mis tekivad nii impulsi algul kui ka selle lõpul. Need siirde protsessid mõjutavad signaali kuju ja nendega tuleb arvestada. Impulss signaalid on vaadeldavad mittesiinuseliste voolude ja pingetena, mille kohta on tõestatud,
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................5 Sümbolid .....................
4. AJAMITE JÕUAHELATE LÜLITUSED Kuidas ühendatakse elektrimootori mähised toiteallikaga? Lülitid, releed ja kontaktorid, programmeeritavad kontrollerid Kuidas toimub mootorite kiiruse reguleerimine? Impulss- või takistusreguleerimine? Pooljuhtmuundurite skeemid 4.1. Mootorite lihtsad käivitus- ja kaitseahelad Asünkroonmootori otselülitus toitevõrku. Suurt osa asünkroonmootoritest lülitatakse otse toitevõrku. Lülitusseadmeks võivad olla kas koormus või kaitselülitid. Sagedaste lülituste korral on lülitusseadmeks tavaliselt surunupplülititega juhitav kontaktor. Sõltuvalt vajadusest võib mootor pöörelda kas ühes suunas, või tuleb selle pöörlemissuunda muuta. Ühesuunalise pöörlemisega mootori otselülitus toitevõrku on näidatud joonisel 4.1. Mootori ja juhtnuppude toiteahelad pingestatakse lülitiga Q, milleks tavaliselt on kaitselüliti. Mootori käivitamine toimub vajutamisega surunupplülitile SK, mis sulgeb kontaktori lülitusmagneti mähise K voolua

































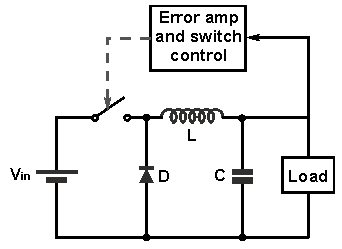
![Joonis 3. Pingeregulaatori plokkskeem [3]](./mpic/89879/Backup-4_1.png)




Kõik kommentaarid