TALLINNA TEHNIKAÜLIKOOL Energeetikateaduskond Elektrotehnika aluste ja elektrimasinate instituut ELEKTROTEHNIKA II Kodutöö nr. 2 Homogeenne liin Skeem nr 14 Tudeng: Juku Matrikli nr: 0000000 Rühm: AAAB Juhendaja: A. Kilk Tallinn 2016 Elektrotehnika II kodutöö nr 2 Algandmed: f 6500 f 6500 Hz L 21 L 21km R0 102 R0 102 / km C 0 2.8 10 9 C 0 2,8nF / km L0 4.27 10 3 2 15.37 deg ...
Tallinna Tehnikaülikool Elektrotehnika aluste ja elektrimasinate instituut Elektrotehnika II Kodutöö II Homogeenne liin Variant:46 Õpilane: Rühm: AAA Juhendaja: A.Kilk 2004 Tallinn Algandmed: 9 f 1500 Co 12 10 U2 12 3 l 80 I2 50 10 ...
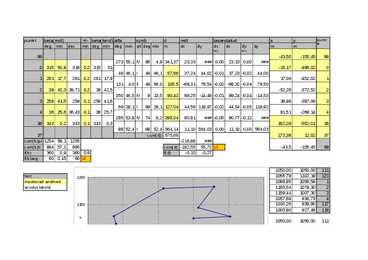
punkt beta(mdt) +/- beta(tsnd) alfa rumb d mdt tasandatud x y punkt # deg min dec min deg min deg min qrt deg min m dx dy dx dx dy dy m m +/- +/- 99 -43,50 -155,45 99 273 55,1 IV 86 4,9 341,37 23,33 ### 0,00 23,33 0,00 ### 0 315 50,8 316 0,2 315 51 ...
❆❧❣❡❜r❛ ■ ❡❦s❛♠✐❦s ❦♦r❞❛♠✐♥❡ ✾✳ ❥✉✉❧✐ ✷✵✶✺✳ ❛✳ ❑❡❡r✉❧✐s❡♠❛❞ ❦üs✐♠✉s❡❞ ✶✳ ❚⑦õ❡st❛❞❛✱ ❡t ❦✉✐ ❆ ♦♥ r✉✉t♠❛❛tr✐❦s ü❧❡ ❦♦r♣✉s❡ ❑ ❥❛ s❡❧❧❡ ♠❛❛tr✐❦s✐ ♠✐♥❣✐❧❡ r❡❛❧❡ ❧✐✐t❛ ❑ s✉✈❛❧✐s❡ ❡❧❡♠❡♥❞✐❣❛ ❦♦rr✉t❛t✉❞ t❡✐♥❡ r✐❞❛✱ s✐✐s ❆ ❞❡✲ t❡r♠✐♥❛♥t ❡✐ ♠✉✉t✉✳ ❚õ❡st✉s ❖❧❣✉ A = (aij ) ∈ M atn ❥❛ ♦❧❣✉ B ♠❛❛tr✐❦s✱ ♠✐s ♦♥ s❛❛❞✉❞ ♠❛❛t✲ r✐❦s✐st A s❡❧❧❡ k✲♥❞❛❧❡ r❡❛❧❡ ❛r✈✉❣❛ c ❦♦rr✉t❛t✉❞ l✲♥❞❛ r❡❛ ❧✐✐t♠✐s❡❧✱ ❦✉s k = l✳ P❡❛♠❡ ♥ä✐t❛♠❛✱ ❡t |A| = |B|✳ ❊❡❧❞❛♠❡✱ ❡t k < l✳ ▼❛❛tr✐❦s✐ B k ✲s r✐❞❛ ❦♦♦s♥❡❜ ❡❧❡♠❡♥t✐❞❡st ak1 + cal1 , ak2 + cal2 , . . . , akn + caln ❑õ✐❦ ü❧❡❥ää♥✉❞ A ❡❧❡♠❡♥❞✐❞ ♦♥ s❛♠❛❞✱ s❡❡❣❛ ❞❡t❡r♠✐♥❛♥t ♦♥ ✈õr❞♥❡ s✉♠✲ ♠❛❣❛✳ |B| = sign(σ)a1σ(1) . . . ak−1,σ(k−1) (akσ(k) + calσ(k) )ak+1,σ(k+1) . . . alσ(l) . . . anσ(n) σ∈Sn ❑❛s✉t❛❞❡s r❡❛❛❧❛r✈✉❞❡ ❞✐str✐❜✉t✐✐✈s✉s❡ ❥❛ s✉♠♠❛ ♦♠❛❞✉s✐ ✈õ✐♠❡ s❡❧❧❡ ❦✐r✲ ❥✉t❛❞❛ ...
Ülesanne 6 Autod ja traktorid II Sõiduki kiirendus TA III Martin Leopard 1. Sõiduki mark: BMW520i 92kW pre 1996 a 2. Valida arvutusteks vajalikud lähteandmed kooskõlas valitud sõidukiga ja ülesande tingimustega. Mootori effektiivvõimsus Pe := 92 kW Pe ma := 1730 kg Auto mass := 0.88 Liikumistee haardetegur := 0.013 Veeretakistus kg := 1.202 Õhutihedus 3 m M := 190 N m Mootori moment 4200 rpm juures Auto lauppinna pindala H := 1.801m kõrgus laius B := 1.435 m 2 A := 0.8 H B = 2.068 m Õhutakistustegur cd := 0.4 ...
Variant nr 11 Tõste ja edastusmasinad 01.01.2019 Lihtsad tõstemehhanismid Kruvitungraud arvutus Algandmed P := 68kN tõstevõime L := 0.2m tõstekõrgus R := 160N käepidemele rakendatav jõud N Teras 45 spindli materjal s := 70MPa = 70 lubatud survepinge 2 mm Malm C4 18-36 mutri materjal f := 0.15 hõõrdetegur keermepaarile (teras-malm (1, lk 58 )) Arvutused 1) Spindli tugevustingimus survele (1, lk 58) P0 s = 2 d1 4 Arvutuslik koormus P0 P0 := 1.3 P = 88.4 kN Keerme siseläbimõõt ...
Vagonetid Algandmed ton := 1000kg ton Q := 180 vagonettide tootlikkus hr m v := 2.1 vagonettide liikumiskiirus s 3 H := 1 10 m vagonettide tõusukõrgus z1 := 4 vagoneti rataste arv Gv := 420kg vagoneti mass a := 100m vagonettide intervall t c := 18hr vagonettide tööaeg ööpäevas L := 6000m trossitee pikkus ton := 2.5 rauamaagi puistemass (1) 3 m Arvutus Trossitee keskmin e tõus H := = 0.167 L sin( ) = 0.166 = 9.55 deg Tro...
Tallinn University of Technology Department of Electrical Engineering Filters Report on Exercise 5 in AAR3320 Electronics and Semiconductor Engineering Student: Student Code: Study Group: Instructor: Prof. Valery Vodovozov Tallinn 1. RC filter R Vnoise 1000Ω 15 Vrms 11kHz 0Deg RL V C1 11kΩ 7.23µF 11.23 Vrms IC=0V 11 Hz 0Deg Figure 1. Circuit diagram of the low-pass RC filter Calcul...
Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Harjutusülesannete aruanne õppeaines Automaatjuhtimise alused Üliõpilane: Matrikli nr.: Õpperühm: AAAB-41 Juhendaja: Taavi Möller Tallinn 2013 1. Lineaarsete süsteemide tüüplülid Eesmärgiks on tutvuda integreerimis-, aperioodilise- ja võnkelüliga. 1.1. Integreerimislüli 1 1 voimendus1 Sisendiks kasutada konstantset signaali. s Variandid Constant Transfer F...
TALLINNA TEHNIKAÜLIKOOL Infotehnoloogia teaduskond Automaatikainstituut OLGA DALTON 104493IAPB Töö nr 1 nimetusega NIHKEANDURI KALIBREERIMINE Aruanne aines ISS0050 Mõõtmine Õppejõud: Rein Jõers Tallinn 2011 Üldine iseloomustus Nihkeandur sisaldab muunduri, mis muundab pöördliikumise pingesignaaliks U. Töö eesmärk Selgita, kui palju anduri tegelik karakteristik U() erineb temale omistatud nimikarakteristikust Un()=C· ja kui täpselt seda erinevust saab mõõta. Töö käik C = 28,6 mV/deg Rk = 90000 R = 40000 nr i Uvi(V) Uki(V) Nominaalne i Viga Uv u()(°) u(Uv)(V) v k (°) Un= C·(V) (°) 1 0 0,01249 0,05952 0 0,5 0...
Nurk Uv V Uk V Un Uv i Uk Uvv % 0 0,034327 0,034268 0 0,5 0,034327 0,858 0,034268 0,039 33 0,9849 0,94916 0,9438 0,5 0,0411 1,028 0,00536 0,015 66 1,9305 1,793 1,8876 0,5 0,0429 1,073 -0,0946 0,009 99 2,8808 2,6219 2,8314 0,5 0,0494 1,235 -0,2095 0,0087 132 3,8095 3,4367 3,7752 0,5 0,0343 0,858 -0,3385 0,0085 165 4,742 4,2517 4,719 0,5 0,023 0,575 -0,4673 0,0084 198 5,6898 5,1262 5,6628 0,5 0,027 0,675 -0,5366 0,0084 231 6,6243 6,0459 6,6066 0,5 0,0177 0,442 -0,5607 0,0083 264 7,5772 7,0654 7,5504 0,5 0,0268 0,67 -0,485 0,0083 297 8,5255 8,1936 8,4942 0,5 0,0313 0,782 -0,3006 0,...
Tallinna Tehnikaülikool Mõõtmine Laboratoorne töö nr 1 Nihkeanduri kalibreerimine Aruanne Üliõpilane: IATB-21 103636 Õppejõud : Kristina Vassiljeva Tallinn 2011 R U. U( ) Un( )=C . : 5 , . : E=24V R=40 k 5% Rk = 90 k C = 28.6 mV/deg min= 0 º max= 330 º 1. . : · 5, R=40 k ±5%, ±0,2%, P=1 W; · Un()=C, //, · =0° ... 330°; : . . 2. Uv() Uk() Rk=90k . , o Uv(V) , Rk=0 Uk (V) , Rk= 90k 0 0.005956 0.005948 33 0.95111 0.91766 66 1.8873...
Sander Saarniit Lintkonveieri arvutus 110243 ALGANDMED ton := 1000kg ton Q := 280 lintkonveieri tootlikkus hr basalt transporditav materjal H := 8m tõustekõrgus := 12deg kaldenurk künakujuline lindi kuju köetav töökeskkond vähene abrasiivtolm keskkonnas ton := 1.600 basaldi erikaal (1, lk 24) ...
Tallinna Tehnikaülikool Elektrotehnika instituut Mootori analüüs Õppeaines Automaatjuhtimise alused Üliõpilane: Matrikli nr: Õpperühm: Juhendajad: Tallinn 2015 Sisukord 2 Mootori andmed..........................................................................................................................3 Konstantide arvutamine..............................................................................................................3 Matemaatiline mudel...............................................
2018 Boolean Functions and their Cryptographic Criteria * Univeristy of Tartu, Estonia Lomonosov Moscow State University, Russia Contents 1. Introduction ..................................................................................................................................... 3 2. Boolean functions and their representations ................................................................................. 4 2.1 Truth table ............................................................................................................................... 4 2.1.1 Disjunctive normal form .................................................................................................. 4 2.1.2 Conjunctive normal form ......................................................................................
EESTI MEREAKADEEMIA Laevandusteaduskond TÜÜRIMEES MEREPRAKTIKA ARUANNE Victoria I Praktikakoht 24.04.2007 23.04.2009 Praktika algus ja lõpp Õppegrupp: LL- 41 Juhendas: Rein Raudsalu TALLINN 2009 Retsensioonid 2 Sisukord LAEVA ANDMED, VAHITEENISTUS, LASTIKÄSITLUS, PÜSTUVUS, MEREPRAKTIKA .........................................................................................................................................................5 Üldandmed ..................................................................................................................................5 Joonised .......................................................................................................................................7 Vahitüürimehe vastutus navigatsioonivahis ....................................
1)Väävel ja väävelhape Tavalistes tingimustes esineb vähendab väävli (SO2) emissiooni korstna kaudu. Selle gaasi vahel peab tagama optimaalse temperatuuri. Kolonni väävel helekollases tahkes vormis rombiliste voi meetodi puhul võetakse 4-kihilises kolonnis gaas välja ülemises osas asub restil katalüsaatori kiht. Kolonni monokliinsete kristallidena või tumeda, amorfse massina kolmanda katalüsaatori kihi järel ning suunatakse nn alumises osas on soojusvaheti. Gaasi liikumine kolonnis on (nn plastiline väävel). Üleminek rombilise ja vahepealsesse absorberisse, sealt aga läbi organiseeritud selliselt, et kindlustada optimaalne monokristalse vormi vahel toimub 95,5 °C juures, soojusvaheti neljandasse katalüsaatori kihti tagasi. temperatuur (~ 500°C) katalüsaatori kihis. See sellest kõrgemal...
I.1.Mehhaanika 1.1.Kinemaatika 1.1.1.Inertsiaalne taustsüsteem Liikumise kirjeldamine peab toimuma ajas ja ruumis.Ruumis määratakse keha asukoht taustsüsteemi suhtes.Taustsüsteemis kehtib Newtoni 1 seadus.Iga taustsüsteemi,mis liigub inertsiaalse suhtes ühtlaselt ja sirgjooneliselt,nimetatakse samuti inertsiaalseks. Üleminek ühest inertsiaalsest süsteemist teisesse: Galillei teisendus: keha koordinaate arvestades,et aeg külgeb mõlemas süsteemis ühtemoodi. x=x'+V0*t x-I süsteem y=y' x'-II süsteem z=z' t=t' Keha kiirus on esimeses süsteemis: V=V'+V0 Dünaamika võrrandid ei muutu üleminekul Ist inertsiaalsest taustsüsteemist teisesse,see tähendab,et nad on invariantsed koordinaatide teisenduste suhtes. 1.1.2.Ühtlane sirgliikumine Keha liikumise tegelik tee on trajektoor. Nihkvektoriks s¯ nimetame keha liikumise trajektoori alg-ja lõpppunkti ühendavat vektorit.Olgu nihe S¯ a...
AINEVAHETUSE ÜLDISELOOMUSTUS METABOLISMI PÕHIMÕISTED Metabolism = ainevahetus kõigi elusrakus kulgevate keemiliste reaktsioonide võrk Katabolism keerulise ehitusega ühendite lagundamisega (degradatsiooniga) seotud reaktsioonide kogum Anabolism raku makromolekulide sünteesiga seotud reaktsioonide kogum Vahemetabolism ainevahetusreaktsioonid, milles osalevad (intermediaarne metabolism) väikesed molekulid (nn. intermediaadid) Metaboliidid raku ainevahetuses osalevad ained Metaboolsed rajad järjestikuste ensüüm reaktsioonide ahelad; ühe lõppprodukt on substraadiks järgmises reaktsioonis Metaboolsed rajad on paljuastmelised · Lineaarsed · Hargnenud · Tsüklilised METABOLISM KULGEB ÜKSIKUTE, KONTROLLITUD ASTMETENA Glükoosi kontrollimatul lagundamisel vabaneks korraga suur hulk energiat. Paljuastmelises ensümaatilises protsessis on vabanevad energiahulgad väikesed (mitte üle 60 kJ/mol) ja...
Anne Visnapuu DEFORMATSIOONIVUUGID REFERAAT Õppeaines: TEERAJATISED I Ehitusteaduskond Õpperühm: KTEI 62 Juhendaja: Prof. Priit Vilba Tallinn 2010 SISUKORD SISUKORD ................................................................................................................................ 2 SISSEJUHATUS ........................................................................................................................ 3 DEFORMATSIOONIVUUKIDE ARVUTAMINE .................................................................. 5 DEFORMATSIOONIVUUKIDE RAJAMINE ......................................................................... 9 KASUTATUD KIRJANDUS .................................................................................................. 16 ...
I.1.Mehhaanika 1.1.Kinemaatika 1.1.1.Inertsiaalne taustsüsteem Liikumise kirjeldamine peab toimuma ajas ja ruumis.Ruumis määratakse keha asukoht taustsüsteemi suhtes.Taustsüsteemis kehtib Newtoni 1 seadus.Iga taustsüsteemi,mis liigub inertsiaalse suhtes ühtlaselt ja sirgjooneliselt,nimetatakse samuti inertsiaalseks. Üleminek ühest inertsiaalsest süsteemist teisesse: Galillei teisendus: keha koordinaate arvestades,et aeg külgeb mõlemas süsteemis ühtemoodi. x=x'+V0*t xI süsteem y=y' x'II süsteem z=z' t=t' Keha kiirus on esimeses süsteemis: V=V'+V0 Dünaamika võrrandid ei muutu üleminekul Ist inertsiaalsest taustsüsteemist teisesse,see tähendab,et nad on invariantsed koordinaatide teisenduste suhtes. 1.1.2.Ühtlane sirgliikumine Keha liikumise tegelik tee on trajektoor. Nihkvektoriks s nimetame keha liikumise trajektoori...
KINNITUSRAKISTUS DETAILI ,,FLANTS" TÖÖTLEMISEKS KURSUSE PROJEKT Õppeaines: SEADMED JA RAKISED Mehaanikateaduskond Õpperühm: MI-71 Juhendaja: Janis Piiritalo Tallinn 2011 SISUKORD SISUKORD ..........................................................................................................................................2 KURSUSEPROJEKTI ÜLESANNE ...................................................................................................3 SISSEJUHATUS ..................................................................................................................................4 1. SELETUSKIRJA OSA ....................................................................................................................5 1.1. Marsruuttehnoloogia valiku kirjeldus koos vahetöötlemismõõtmega. .....................................5 1.2. Tööpingi parameetrite kirjeldus. ...............
Diskreetne matemaatika II Suulise eksami konspekt IABB 2011 [1]. Hulgad. Alam- ja ülemhulgad. Tehted hulkadega. [2]. Hulga võimsus. Kontiinumhüpotees. [3]. Järjendid. Permutatsioonid. Kombinatsioonid. [4]. Binoomi valem. Pascali kolmnurk. [5]. Liitmis- ja korrutamisreegel kombinatoorikas. [6]. Kordustega permutatsioonid. Multinoomkordajad. [7]. Elimineerimismeetod (juurde- ja mahaarvamise valem). [8]. Korratused ja subfaktoriaalid. [9]. Dirichlet` printsiip. [10]. Arvujadade genereerivad funktsioonid. Jadade ja genereerivate funktsioonide teisendamine. [11]. n objekti jaotamine k gruppi. [12]. Rekurrentsed võrrandid. Rekurrentsi lahendamine ad hoc meetodil ja iteratsioonimeetodil. [13]. Tasandi tükeldamine n sirgega ja n nurgaga. [14]. Lineaarsed rekurrentsed võrrandid. [15]. Rekurrentsete võrrandite lahendamine genereerivate funktsioonide ...
Mat. analüüsi eksami küs. vastused: OSA 1 1. Millisel tingimusel nimetatakse sümbolit x muutujaks mingis hulgas X? Kui sümbol x tähistab hulga X suvalist elementi, siis nimetatakse sümbolit x muutujaks hulgas X 2. Tooge hulkade kohta 2 näidet! y fx () Reaalarvude-, kompleksarvude-, vektorite-, maatriksite-, kaubahalli kauba hulk. 3. Mis on operaator? Tooge 2 näidet! Eeskirja f(f()fx()) , mis näitab kuidas leida muutuja x väärtusele hulgas X vastavat muutuja x hulgas Y, nimetatakse operaatoriks. väärtust f ( x) Näited: aritmeetilised tehted reaalarvudega, aritmeetilised tehted kompleksarvudega,...
TEHNILINE TERMODÜNAAMIKA SISSEJUHATUS Termodünaamika on teadus energiate vastastikustest seostest ja muundumistest, kus üheks komponendiks on soojus. Tehniline termodünaamika on eelmainitu alaliigiks, mis uurib soojuse ja mehaanilise töö vastastikuseid seoseid. Tehniline termodünaamika annab alused soojustehniliste seadmete ja aparaatide (näiteks katelseadmete, gaasiturbiinide, sisepõlemismootorite, kompressorite, reaktiivmootorite, soojusvahetusseadmete, kuivatite jne.) arvutamiseks ja projekteerimiseks. Tehniline termodünaamika nagu termodünaamika üldse tugineb kahele põhiseadusele. Termodünaamika esimene seadus on energia jäävuse seadus, rakendatuna soojuslikele protsessidele, teine seadus aga määrab kindlaks vahekorra olemasoleva soojuse ja temast saadava mehaanilise töö vahel, st määrab kindlaks soojuse mehaaniliseks tööks muundamise tingimused. Termodünaamika kui tead...
Referaat Railgun Table of contents Introduction......................................................................................................................................3 1.What a railgun basically is............................................................................................................4 1.1History of railguns...................................................................................................................4 1.2Theory behind it......................................................................................................................5 1.3How a railgun works...............................................................................................................6 1.4How a railgun would work on a military ship in the future....................................................8 3. Research advances so far...............................................................
1.1.1.Inertsiaalne taustsüsteem Dünaamika võrrandid ei muutu üleminekul Ist inertsiaalsest taustsüsteemist teisesse,see Taustsüsteem, mis seisab paigal või liigub tähendab,et nad on invariantsed sirgjooneliselt a=0. Taustsüsteemiks koordinaatide teisenduste suhtes. nimetatakse taustkehaga seotud 1.1.2.Ühtlane sirgliikumine koordinaatsüsteemi ja ajaloendamismeetodit ehk kella. Seega taustsüsteem koosneb 1) nim liikumist, kus 1.Ühtlaseks sirgliikumiseks taustkehast, 2) selle koordinaadistikust, 3) keha sooritab mistahes võrdsetes aja mõõtmisviisist. ajavahemikes võrdsed nihked. Sellise liikumise puhul on hetkkiirus võrdne *Trajektoor on keha ...
€; ka F- ftiEZSg =o;5-E+=i3"- -€s t..;.F s q;:= ')'4= ft€ '9= :*i J y=B?Tii itE nt =:> 3 ?- 2-.VG !E'ii=:;riVf i: - i-Yg=- E 5 Et F>^Y,= -,r d s'ir& -c -- == =Ei==': E-=F.*:-€=v2.2; = =.g ,-J; = Z d.i:X:G€{'=13ag4. i-- -,-Yt EglPcElit'=qro- = ...
Tehnikagümnaasium TALLINNA TEHNIKAGÜMNAASIUM AINEKONSPEKT MAJANDUSÕPETUS II OSA FINANTSJUHTIMINE 1 Tehnikagümnaasium Õppeaine eesmärk Anda õpilastele majandusalaseid üldteadmisi ettevõtte majandustegevuse olulisematest külgedest, finantsarvestuse alustest, kontseptsioonidest seostatuna Eesti seadusandluse ja ärikeskkonna ning nendest tulenevate probleemidega. Aine käsitlemisel keskendutakse põhimõistete, struktuuride, reeglite ja protsesside ning metoodiliste võtete selgitamisele ettevõtluse esmatasandil. Loengukonspekt sisaldab teoreetilisi aluseid ja vajalikke praktilised näited probleemsed ülesanded (nn. miniprojektid), milledele on vaja anda majanduslik hinnang ja teha õiged otsused probleemide käsitlusel. Ülesannete kogumiku koostamisel on lähtutud vasta...
Tehnikagümnaasium TALLINNA TEHNIKAGÜMNAASIUM AINEKONSPEKT MAJANDUSÕPETUS II OSA FINANTSJUHTIMINE 1 Tehnikagümnaasium Õppeaine eesmärk Anda õpilastele majandusalaseid üldteadmisi ettevõtte majandustegevuse olulisematest külgedest, finantsarvestuse alustest, kontseptsioonidest seostatuna Eesti seadusandluse ja ärikeskkonna ning nendest tulenevate probleemidega. Aine käsitlemisel keskendutakse põhimõistete, struktuuride, reeglite ja protsesside ning metoodiliste võtete selgitamisele ettevõtluse esmatasandil. Loengukonspekt sisaldab teoreetilisi aluseid ja vajalikke praktilised näited probleemsed ülesanded (nn. miniprojektid), milledele on vaja anda majanduslik hinnang ja teha õiged otsused probleemide käsitlusel. Ülesannete kogumiku koostamisel on lähtutud vasta...
Tehnikagümnaasium TALLINNA TEHNIKAGÜMNAASIUM AINEKONSPEKT MAJANDUSÕPETUS II OSA FINANTSJUHTIMINE 1 Tehnikagümnaasium Õppeaine eesmärk Anda õpilastele majandusalaseid üldteadmisi ettevõtte majandustegevuse olulisematest külgedest, finantsarvestuse alustest, kontseptsioonidest seostatuna Eesti seadusandluse ja ärikeskkonna ning nendest tulenevate probleemidega. Aine käsitlemisel keskendutakse põhimõistete, struktuuride, reeglite ja protsesside ning metoodiliste võtete selgitamisele ettevõtluse esmatasandil. Loengukonspekt sisaldab teoreetilisi aluseid ja vajalikke praktilised näited probleemsed ülesanded (nn. miniprojektid), milledele on vaja anda majanduslik hinnang ja teha õiged otsused probleemide käsitlusel. Ülesannete kogumiku koostamisel on lähtutud vasta...
Radarid Raadiolokatsioonialused 1.1Raadiolokatsiooni põhimõte Raadiolokatsiooniks nimetatakse objektide avastamist ja avastatud objektide koordinaatide määramist meetodi abil, mis põhineb raadiolainete tagasipeegeldamisel ja peegeldunud raadiolainete vastuvõtul. Sellel põhimõttel töötavat seadet nimetatakse raadiolokaatoriks. Igapäevases keelepruugiks nimetatakse raadio- lokaatorit ka radariks. Termin tuleneb inglise keelest sõnast Radar – radiodetection and ranging 1.2 Radari töö põhimõte Navigatsiooniline raadiolokaator töötab järgmiselt. Saatja genereerib ja kiirgab ülikõrgsageduslikke raadiolaineid, mis sondeerivad ümbritsevat keskkonda. Kui raadiolaine teele satub keha, mille dielektriline läbitavus erineb keskkonna omast, siis teatud osa kehale langevast energiast peegeldub kajana tagasi, millest osa võtab vastu raadiolokaatori antenn ja kuvarile ilmub objekti kaja helendava punkti näol . Sellega on tä...
Liigutustegevuse tunnetuslikud ja käitumuslikud alused 1. PSÜHHOLOOGIA.....................................................................................................1 2. KOGNITIIVNE PSÜHHOLOOGIA.........................................................................2 BIOLOOGILINE PSÜHHOLOOGIA...........................................................................3 ENDOKRIINSÜSTEEM JA HORMOONID................................................................4 NARKOOTIKUMIDEST...............................................................................................5 MOTIVATSIOON..........................................................................................................6 TEADVUSE SEISUNDITEST......................................................................................9 TAJU...........................................................................................................
Arvutigraafika I ÜLESANNE I Pinnatükk Sissejuhatus Enne joonestusprogrammiga AutoCAD töötama asumist on soovitatav läbi lugeda see Sissejuhatus ja teha endale märkmeid sest vastavalt Murph’i seadustele: „... juhul, kui vaatamata mitmesugustele ja laiaulatuslikele katsetele, uus seade ei hakka tööle, on edasise aja kokkuhhoiu mõttes viimane aeg alustada tutvumist selle seadme kasutusjuhendiga...” Aga ...teisest küljest ei maksa kaotada ka lootust, ja kui on küllalt julgust, võib minna kohe leheküljele 270 ja hakata joonestama pinnatükki. Sel juhul tabab seniseid AutoCAD-programme kasutanuid rida üllatusi... Põhimõtteliselt saab siintoodud Juhendis toodud andmeid AutoCAD-19.0 kohta kasutada ka vanemate AutoCAD-vormingute korral, sest tegelikult on AutoCAD- joonestamise põh...
AKTIIVÕPPE MEETODID TÖÖLEHED Merlecons ja Ko OÜ 0 SISUKORD AKTIIVÕPPE MEETODID I.....................................................................5 AJALEHT...................................................................................................6 EBASELGE JA SELGE EESMÄRK..........................................................6 EBAVÕRDSED VAHENDID.................................................................10 ELUVESI...................................................................................................12 ENESEKEHTESTAMINE.......................................................................18 GRUPIKÄITUMINE...............................................................................21 HEA JA EDUKAS INIMENE.................................................................22 INTERVJUU................
Handbook of Meat Processing Handbook of Meat Processing Fidel Toldrá EDITOR A John Wiley & Sons, Inc., Publication Edition first published 2010 © 2010 Blackwell Publishing Blackwell Publishing was acquired by John Wiley & Sons in February 2007. Blackwell’s publishing program has been merged with Wiley’s global Scientific, Technical, and Medical business to form Wiley-Blackwell. Editorial Office 2121 State Avenue, Ames, Iowa 50014-8300, USA For details of our global editorial offices, for customer services, and for information about how to apply for permission to reuse the copyright material in this book, please see our website at www.wiley.com/ wiley-blackwell. Authorization to photocopy items for internal or personal use, or the internal or personal use of specific clients, is granted by Blackwell Publishing, provided that the base fee is paid directly to the Copyright Clearance Cent...