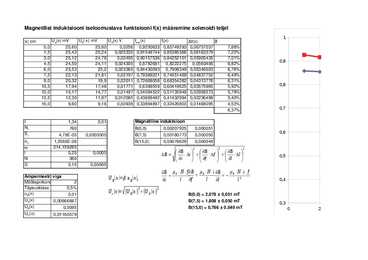
Magnetilist induktsiooni iseloomustava funktsiooni f(x) määramine solenoidi teljel U e x x cm mV U e ( x) U e ( x) mV mV f exp ( x) f t (x) f (x ) 0 93.56 93.56 93.560 0.851 0.857 0.006 0.008 0.015 92.76 93.30 93.030 0.846 0.854 0.008 0.009 0.03 91.17 92.40 91.785 0.835 0.843 0.008 0.009 0.045 88.50 90.69 89.595 0.815 0.822 0.007 0.009 0.06 84.51 87.67 86.090 0.783 0.791 0.008 0.010 0.075 78.74 83.27 81.005 0.737 0.746 0.009 0.012 0.09 71.30 77.43 74.365 0.676 0.684 0.007 0.01...
3. Magnetiline põhjasuund. 3 · Tõeline põhjasuund on suund teie asukohast põhjapooluseni. 4 Kilomeetervõrgu põhjasuund. Kilomeetervõrgu põhjasuund on põhjast lõunasse kulgevate koordinaattelgede suund kaardil 5 Magnetiline põhjasuund. · Magnetiline põhjasuund on suund, millele osutab kompassinõela põhjapoolne ots. Magnetilist põhjasuunda määrataksegi magnetkompassi abil. · Magnetiline põhjapoolus ei asu mitte geograafilisel poolusel, vaid sellest ligi 1500 km lõuna pool, Kanada ranniku lähedal Bathursti saare juures. · Seda ei märgita üles, kuna magnetiline põhjapoolus muudab pidevalt asukohta. 6 Kraadisüsteem · Koolis kasutatakse nurkade mõõtmiseks poolringikujulist malli, mis oli jaotatud 180 kraadiks.
11 115,9 113,8 114,85 0,646346 0,574388 0,071958 0,125278 12 103,4 100,6 102 0,574029 0,511359 0,06267 0,122555 13 90,2 87,1 88,65 0,498899 0,446423 0,052476 0,117547 14 77,1 73,7 75,4 0,424331 0,383045 0,041286 0,107785 15 64,9 61,3 63,1 0,35511 0,324268 0,030842 0,095113 <> 0,127659 Magnetilist induktsiooni iseloomustavate funktsioonide graafik 1,1 1 0,9 0,8 0,7 0,6 fe(x) f(x) 0,5 ft(x) 0,4 0,3 0,2 0,1 0
e R2 8U a B k R a 1 k2 m R a (1) kus Ua on anoodpinge, Ra –anoodi raadius ja Rk –katoodi raadius. Sellest valemist järeldub, et elektroni erilaengu arvutamiseks on vaja antud anoodpinge korral määrata kriitilise induktsiooni väärtus Bk ja teada anoodi ning katoodi raadiusi. Pika solenoidi magnetilist induktsiooni arvutatakse valemiga: s I l N B = µ0 , (2) kus µ0 on SI- süsteemi magnetiline konstant ( m 7 H 0 4 10− µ = π ⋅ ), N on pooli keerdude arv, l – solenoidi pikkus ja s I – voolutugevus solenoidis. Seega taandub kogu katse solenoidi kriitilise voolutugevuse sk I leidmisele. 2 2. Töö käik 1. Protokollin mõõteriistade ja katseseadme konstandid 2
muutumisel. Magnetvoog on füüsikaline suurus, mis näitab, millisel määral läbivad magnetvälja jõujooned vaadeldavat pinda selle pinna suuruse ja asendi tõttu magnetväljas: = B S cos Faraday elektromagnetilise induktsiooni seadus: induktsiooni elektromotoorjõud on võrdeline magnetvoo muutumise kiirusega: E= . t Eneseinduktsiooni nähtuseks nimetatakse nähtust, mille puhul magnetilist induktsiooni juhtmes põhjustab voolu muutumine juhtmes endas. Pooli induktiivsus on füüsikaline suurus, mis näitab, kui suure magnetvoo muutuse tekitab selle pooli korral voolutugevuse ühikuline muutus. Võnkeringiks nimetatakse võnkuvat elektrilist süsteemi, mille võnkesagedus on määratud süsteemi omadustega. Võnkering sisaldab alati induktiivpooli ja kondensaatorit. Thompsoni valem: T = 2 L C .
Magnetilist induktsiooni iseloomustava funktsiooni f(x) määramine solenoidi teljel 1 |x| cm Ue(x) mV Ue(x) mV Ue(x) V fexp(x) ft(x) f(x) 0,0 25,60 25,60 0,0256 0,9250633 0,85749293 0,06757037 7,88% 1,5 25,43 25,24 0,025335 0,91548744 0,85385366 0,06163379 7,22% 3,0 25,12 24,78 0,02495 0,90157536 0,84252101 0,05905435 7,01% 0,9 4,5 24,50 24,11 0,024305 0,8782681 0,8222275 0,0560406 ...
Voolu olemasolu saab kindlaks teha tema mõju ehk toime järgi. Soojuslik (Kõik juhid soojenevad alati); Valgus (Nt hõõgniit; alati gaasist läbiminekul); Magnetiline (Elektrivoolu mõjul mag. nõel kaldub kõrvale. Samal põhimõttel töötavad paljud elektrimootorid ja mõõteriistad); Keemiline (Ainult vedelik) Elektrivoolu mõju inimesele: Vool avaldab inimesele Soojuslikku (põletushaavad + kuumenemine); Keemilist (siseorganite kahjustused) ; Magnetilist (Närvisüsteemi mõjutamine, krambid jne) mõju. On inimesele ohuti tugevuseni 5mA ja surmav alates 50mA. Elektrivool erinevates keskkondades: Metallides: Vabadeks laengukandjateks valentselektronid (vabad elektronid.) Vedelikes: Vedelikke, milles leidub vabu laengukandjaid nim. elektrolüütideks. Elektrolüütides on vabadeks laengukandjateks positiivsed ja negatiivsed ioonid. Gaasides: Gaasid on üldjuhul dielektrikud, sest neis ei leidu vabu
väärtused B(0), B(xmax /2), B(xmax) ning nende laiendatud liitmääramatused, kasutades ampermeetri lubatud suurimat näiduhälvet (piirhälvet) ja solenoidi pikkuse l määramatust. Funktsiooni fexp(x) määramatuseks lugege ∆f(x) vastaval argumendi väärtusel. 11. Punktide 8 ja 9 alusel hinnake teoreetilise ja eksperimentaalse funktsiooni kokkulangevust. Katseandmete tulemused Magnetilist induktsiooni iseloomustava funktsiooni f(x) väärtuste määramine solenoidi teljel Ie=......................., N=................., l=................., S1=................., N1=................., ω=................... |x|, Ue(x), Ue(-x), Ue(x), fexp (x) ft (x) ∆f (x) δ cm mV mV mV
Magnetväli ümbritseb vooluga juhte ja müsimagneteid. Magnetvaälja olemasolu saab kindlaks teha magnetnõelaga. Magnetväljas võtab magnetnõel kindla suuna. Magnetväljas mõjub magnetilist materjalist kehadele ja vooluga juhtidele magnetjõud. Magnetjõud on suunatud magnetväljas orienteerunud magnetnõela lõunapooluselt põhjapoolusele. Magnetvälja jõujoonteks nimetatakse jooni, mida mööda asetuvad magnetväljas väikeste magnetnõelte teljed. Tunnuseks on, et jõujooned on alati kinnised kõverjooned, mis ümbritsevad vooluha juhti või püsimagnetit, suunda näitab magnetnõela põhjapoolus. Jõujoone suunda saab määrata magnetnõelte abil
5.2. KIIRGUSBILANSS Päikesekiirguse jaotumine ja kiirgusbilanss Päikesekiirgus kujutab enesest elektro- magnetilist lainetust, mille lainepikkus jääb vahemikku 0,1- 4 mikromeetrit. PÄIKESEKIIRGUSE SPEKTER · ULTRAVIOLETTKIIRGUS (UV) U. 8%. 1) ENAMUS NEELDUB STRATOSFÄÄRIS (OSOON) 2) TEKITAB PÄEVITUST 3) SUURES KOGUSES KAHJULIK · NÄHTAV VALGUS U. 56%. 1) SILMAGA NÄHTAV LIITVALGUS 2) MAX ENERGIAGA ON ROHELINE VALGUS · INFRAPUNANE KIIRGUS U. 36%. TUNNEME SOOJUSKIIRGUSENA MAALE JÕUDEV PÄIKESEKIIRGUS · PÄIKESEKIIRTE LANGEMISNURK PÄIKESE KÕRGUS
Solenoidi magnetväli KATSEANDMETE TABEL Tabel 1: Magnetilist induktsiooni iseloomustava funktsiooni f(x) määramine solenoidi teljel | | Ue(x) Ue(-x) fe(x) ft(x) f(x) cm mV mV mV 0,00 17,38 17,38 0,91474 0,85749 0,05725 0,06676 1,50 17,21 17,32 17,27 0,90869 0,85385 0,05483 0,06422
energiakadu on väiksem ja juhtmed võivad olla väiksema ristlõikega. Trafo eesmärgiks ongi muundada mingi pingega vahelduvvoolu elektrienergiat sama sagedusega, kuid teistsuguse pingega vahelduvvoolu energiaks. Trafol on vähemalt kaks mähist, mis asetsevad ühisel terassüdamikul. Mähist, mis on ühendatud energiaallikaga, nim primaarmähiseks. Teist mähist ,mis annab energiat tarbijale, nim sekundaarmähiseks. Südamiku eesmärgiks on suurendada magnetilist sidet primaar ja sekundaarmähise vahel. Kui primaarmähisele rakendada vahelduvpinge, siis tekib terassüdamikus vahelduv magnetvoog, mis indutseerib primaarmähises vastuelektromotoorjõu. Sama magnetvoog on aga aheldatud ka sekundaarmähisega ja indutseerib selles elektromotoorjõu 2) miks kasutatakse elektrienergia ülekandel trafosid? (lk. 63) 3) mis on faasi- ja nulljuhe? (lk. 39) Faasijuhe on vahelduvvooluvõrgu juhe, kus on perioodiliselt muutuv pinge maandatud eseme suhtes
m. a., peitel on aga 1200 – 1400 aastat vanem. Raua isotoop raud-55, mida saadakse tuumareaktoritest, on pehme röntgenikiirguse allikas. Selle isotoobi alusel konstrueerit miniatuursed röntgeniaparaadid, mida kasutatakse meditsiinis ja tehnikas. 1874. a. täheldas Kaasani ülikooli dotsent Smirnov, et Kurski kubermangus kaldub magnetnõel normaalasendist kõrvale. Sajandi lõpul tegi Eestist pärinev Moskva ülikooli professor E. Leist kindlaks, et magnetilist anomaaliat põhjustavad magnetrauamaagi hiigellademed. Kokkuvõte Raud on meile väga tähtis. Rauda vajavad nii inimesed kui ka taimed ja loomad. Rauda leidub inimese kehas, ning palju tarbeesemeid ja hooneid on ehitatud, kasutades rauda. Ilma rauata oleks elu väga raske ette kujutada. Kasutatud materjalid http://et.wikipedia.org/wiki/Raud http://opiobjektid.tptlive.ee/Materjaliopetus/raudssinik_sulamid__mustad_metall id.html http://www.physic.ut.ee/materjalimaailm/Kirjed/Raud
Magnetväli ümbritseb vooluga juhte, püsimagneteid ning kõiki liikuvaid elektriliselt laetud osakesi, olemasolu saab kindlaks teha magnetnõelaga (magnetnõel võtab kindla suuna e. orienteerub). Magnetväljas mõjub magnetilisest materjalidest kehadele ja vooluga juhtidele jõud, mis on suunatud magnetväljas orienteerunud magnetnõela lõunapooluselt põhjapoolusele. Magnetvälja jõujoonteks nimetatakse jooni (kinnised kõverjooned, mis ümbritsevad magnetilist keha), mida mööda asetuvad magnetväljas väikeste magnetnõelte teljed (kujutletavad jooned, tegelikult ei eksisteeri). Magnetvälja iga punkti läbib ainult üks jõujoon. Sirgvoolu magnetvälja jõujoonte suuna saab määrata `parema käe reegli' abil: kui parem käsi asetada nii, et selle väljasirutatud pöial näitab elektrivoolu suunda juhtmes, siis kõverdatud sõrmed näitavad magnetvälja jõujoonte suunda. Igal magnetil on kaks
Electrosmog mõistena tähendab „elektrosaastet“, mis on nähtamatu elektromagnetiline kiirgus, mida tekitavad madalsageduslikud elektromagnetväljad. Seda põhjustavad nii „juhtmeta lahendused“ (nagu juhtmevabad telefonid, mobiiltelefonid, mobiilimastid ja juhtmeta võrgulahendused) kui ka kaablid ja vooluvõrku ühendatud seadmed. Antud töö raames tuleb mõõta magnetvälja iseloomustavat magnetvootihedust ehk magnetilist induktsiooni. Elektromagnetväljade osas on juba pikemat aega viidud läbi palju uurimusi ning katseid, et jõuda üheste järeldusteni ohu osas – seda aga ei ole suudetud. Teadlased jõudnud konsensuseni, et elektromagnetväljad ilmselt kujutavad inimestele ohtu, ent palju tööd tuleb veel teha, et jõuda inimorganismile avaldatava mõju ulatuse osas. Magnetväli. Iga liikuv elektrilaeng tekitab enda ümber magnetvälja, st elektrivoolul on magnetilised omadused
Antud töö teine osa puudutab nn electrosmogi mõõtmist. Electrosmog mõistena tähendab ,,elektrosaastet", mis on nähtamatu elektromagnetiline kiirgus, mida tekitavad madal- sageduslikud elektromagnetväljad. Seda põhjustavad nii ,,juhtmeta lahendused" (nagu juhtmevabad telefonid, mobiiltelefonid, mobiilimastid ja juhtmeta võrgulahendused) kui ka kaablid ja vooluvõrku ühendatud seadmed. Antud töö raames tuleb mõõta magnetvälja iseloomustavat magnetvootihedust ehk magnetilist induktsiooni. Elektromagnetväljade osas on juba pikemat aega viidud läbi palju uurimusi ning katseid, et jõuda üheste järeldusteni ohu osas seda aga ei ole suudetud. Teadlased on jõudnud konsensuseni, et elektromagnetväljad ilmselt kujutavad inimestele ohtu, ent palju tööd tuleb veel teha, et jõuda järeldusteni inimorganismile avaldatava mõju ulatuse osas. Magnetväli. Iga liikuv elektrilaeng tekitab enda ümber magnetvälja, st elektrivoolul on magnetilised omadused
2. Kompaktluminofoorlamp (säästupirn) Kompaktne luminofoorlamp (CFL), tuntud ka kui kompaktlamp või säästulamp. Kompaktluminofoorlampe hakati esmakordselt turustama 1980. aastatel ning need on tuntud pika tööea ja suure tõhususe poolest. On kahte tüüpi kompaktlampidest: integreeritud ja integreerimata lampidega. Kompaktlampidest on kaks peamist komponenti: gaasiga täidetud toru (nimetatakse ka sibulaks või põletiks) ja magnetilist või elektroonilist ballasti. Kompaktlampidest toodetakse nii vahelduvvoolule (AC) kui ka alalisvoolule (DC). Kompaktluminofoorlambid kasutavad võrreldes tavaliste hõõglampidega sama valgusvoo tekitamiseks 6580 % vähem energiat. Kompaktluminofoorlampe on saadaval ka koos väliskestaga, mis varjab gaasiga täidetud torusid ja muudab need veelgi sarnasemaks hõõglampidega. CFL-lampide tööiga on sõltuvalt lambi tüübist ja kasutamisest 6 00015 000 tundi
ümbermagneetimise tsüklit ja mida nimetatakse hüstereesisilmuseks. Olenevalt välise magnetvälja tugevuse suurusest võib saada terve hüstereesisilmuste parve. Valime nendest kõige suurema, s.t. sellise, kus materjal on magneeditud küllastuseni (vt. Joonis 4.1). Küllastatud katsekeha magnetilise induktsiooni väärtust lahtimagneetimisel punktis H=0 nimetatakse jääkinduktsiooniks Br . Joonis . Hüstereesisilmused ja magneetimiskõver Et vähendada magnetilist induktsiooni väärtuselt Br nullini, tuleb rakendada vastassuunaline magnetväli tugevusega Hc. Seda magnetvälja tugevust Hc nimetatakse koertsitiivjõuks. Põhilisteks magnetmaterjale iseloomustavateks karakteristikuteks on magneetimiskõver, s.o. magnetilise induktsiooni sõltuvus magnetvälja tugevusest, ja magnetiline läbitavus. Magneetimiskõver saadakse sümmeetriliste hüstereesisilmuste tippude ühendamise teel (kõver OA, Joonis 1)
väljundiks? Induktiivtajuri töö põhimõtet selgitab joonisel 3.12 toodud skeem. Südamikule on mähitud mähis, millele on raken-datud vahelduvpinge Uv. Mähise poolt tekitatud magnetvoog sulgub läbi õhupilude ja ankru. Ankur on mehaaniliselt kinnitatud detailile, mille nihet mõõdetakse. Joonisel pole detail näidatud, küll aga võib mõõdetav nihe olla nii verti-kaalsuunaline (y1) kui ka horisontaalsuunaline (y2). Ankru nihkumine muudab magnetahela magnetilist takistust, selle tulemusena muutub mähise induktiivsus ja seega ka mähist läbiva vahelduvvoolu tugevus I. 2.11 Mis on diferentsiaalse induktiivtajuri kui automaatikasüsteemi elemendi sisendiks, mis on tema väljundiks? Diferentsiaalsel induktiivtajuril on kaks magnetahelat ühise ankruga (vt joonis 3.14), millega kompenseeritakse ankrule mõjuvat elektromehaanilist jõudu. Mähised 1 ja 2 oma induktiivsustega L1
tumedam kui vastaskülg. Hele ala on täis kraatreid, tume ala on tasane ning ulatub lahtedena heleda ala sisse. Kõige väiksem, Pan, on läbimõõdult ainult 20 km ringis. Kokkuvõte Kuigi Saturn avastati juba antiikajal on ikkagi tema kohta palju küsimusi. Mõistatusliku Saturni on praegu uurimas kosmoselaev Cassini, mis startis 1997. aastal. Saturnini jõudis ta 2004. aastal. Cassini misiooniks on uurida Saturni müstilisi kuusid, rõngaid ja keerulist magnetilist keskkonda. 5 Pilte Saturn Saturni kuu Titan Kasutatud kirjandus: Becklake, S. 1997. Kosmos. Tähed, planeedid ja kosmoselaevad. Tallinn:Varrak http://www.miksike.ee/docs/elehed/4klass/1kosmos/elutuba/saturn.html http://miksike.com/docs/referaadid2005/saturn_evelin.htm http://et.wikipedia.org/wiki/Saturn http://opik.obs.ee/osa2/ptk07/box01.html Pildid: http://images.google.ee/images
Magnetism 1 MAGNETILINE VASTASTIKMÕJU. MAGNETVÄLI. Magnetiline vastastikmõju laetud kehade vahel esinev vastastikmõju, mis on põhjustatud nende kehade liikumisest. Magnetväli magnetilist vastastikmõju edasiandev väli, mis ümbritseb vooluga juhte ja liikuvaid laenguid. Magnetvälja asetatud vooluga kontuurile (raamile) mõjub kontuuri pöörav jõumoment, mis orienteerib kontuuri kindlasse tasakaalulisse asendisse. Kontuuri pinna positiivse normaali suund selles asendis loetakse magnetvälja suunaks kontuuri asukohas. Kontuuri pinna positiivse normaali suund määratakse kontuuris kulgeva voolu suunaga "kruvireegli" järgi.
Baines µ= Bvaakum Mida kujutab endast ferro-, para- ja diamagneetikud? Paramagneetikud >=1, Diamagneetikud <=1, ferromagneetikud >>1, ferromagneetikud säilitavad magnetilise kadumisel oma välimised omadused Mida kujutab endast elektromagnetiline induktsioon? Laengukandjaid paneb liikuma jõud, mis nihutab juhet magnetväljas. Kui liikuv juhe on osa vooluahelast, siis esineb selles ahelas induktsioonivool Mida nimetatakse magnetnivooks? Füüsikaline suuurus, magnetilist suutlikkust läbida vaadeldavat pinda. Tähis: (Fii) Ühik: 1 Wb (veeber) Põhivalem: kus (Fii) on magnetvoog, on pinna magnetinduktsioon on pinna pindala ja (beeta) on nurk pinna normaali ja magnetvälja suuna vahel. Milles seisneb elektromagnetilise induktsiooni seadus? Väidab, et magnetvälja muutumine tekitab elektrivälja. Induktsiooni elektromotoorjõud on võrdelised magnetvoo muutmumise kiirusega. = /t Mida kujutab endast eneseinduktsioon=
magnetvälja vastasmõju ning hakatakse tegema esialgseid süsteemikontrolle elektroonika töökorra kindlaks tegemiseks. 3. Stabiliseerimisele järgneb satelliidi orienteerimine maa suhtes. Eesmärgiks on keerata satelliit positsiooni, kus antennide telg on paralleelne maapinnaga ning risti orbiiditasandiga. Satelliidi positsioon määratakse päikesesensorite ja magnet-sensorite abil. Satelliidi pööramiseks vastavasse suunda kasutatakse magnetilist vastasmõju. Satelliidi stabiliseerimine ja orientatsioon toimuvad automaatreziimil, sest antennide vale asendi korral ei ole kindel, kas maapealse tugijaamaga õnnestuks ühendust saada. 4. Peale satelliidi stabiliseerimist peetakse esimene sideseanss maapealse juhtimiskeskusega ning edastatakse satelliidi sensorite lugemid. Nende põhjal kontrollitakse, kas kõik süsteemid toimivad nagu ette nähtud. Kõigi
lõunast põhja. Kilomeetervõrgu põhjasuund on põhjast lõunasse kulgevate koordinaattelgede suund teie kaartidel. Iga vertikaalne koordinaattelg osutab koordinaatide põhjasuunda. Click to edit Master text styles Second level Third level Fourth level Fifth level Magnetiline põhjasuund on suund, millele osutab kompassinõela põhjapoolne ots. Magnetilist põhjasuunda määrataksegi magnetkompassi abil. Magnetiline põhjapoolus ei asu mitte geograafilisel poolusel, vaid sellest ligi 1500 km lõuna pool, Kanada ranniku lähedal Bathursti saare juures. Click to edit Master text styles Second level Third level Fourth level Fifth level TUHANDIKSÜSTEEM Koolis kasutasite te nurkade mõõtmiseks
Seda näitab deklinatsioon nurk, mille võrra erinevad geograafilised poolused magnetpoolustest. Magnetiline induktsioon on füüsikaline suurus, mis iseloomustab magnetvälja vastavas kohas. Tähiseks on B ja ühikuks tesla(T). Magnetiline läbipaistvus on füüsikaline suurus, mis näitab, mitu korda erineb magnetiline induktsioon homogeenses keskkonnas magnetilisest induktsioonist vaakumis. (µ) Planetaarne indeks Kp kajastab planetaarset magnetilist aktiivsust kesklaiusel. Maa magnetväli kaitseb Maa elanikke kosmilise kiirguse eest.
pöörised. Selline elektriväli tekib magnetvälja muutumisel. ***Voolu puudumise korral juhtmelõigu otstel tekkiv pinge U avaldub kujul U = v l B sin V- juhtmelõigu liikumise kiirus magnetvälja tekitaja suhtes B- magnetinduktsioon l- juhtmelõigu pikkus - nurk liikumise suuna ning magnetvälja suuna vahel ***Näide: Tartu-Tallinna kiirrong sõidab kiirusega 108 km/h piki magnetilist meridiaani kulgeval teelõigul. Kui suur pinge tekib elektromagnetilise induktsiooni tõttu vaguniratta telje otstele? Rööbaste vahekaugus on 1524 mm ja Maa magnetinduktsiooni vertikaalkomponent Eestis 48 T. 2. Faraday katsed Liikuv püsimagnet tekitab voolu lähedalasuvas juhtmes. Vooluga juhtme liikumine tekitab magnetvälja vahendusel voolu naaberjuhtmes Voolu muutus juhtmes tekitab vastava magnetväljamuutuse kaudu voolu naaberjuhtmes 3. Ma g n etvo o g.
Saatana Kolmurk on üks kahest kohast maailmas , kus magneetiline kompass näitab tegelikku põhjasuunda. Tavaliselt näitab kompass magneetilise põhja suunda . Nende kahe suuna vahet teatakse kui kompassi kõikumist või hälvet . Hälbe ulatus võib olla kuni 20 kraadi. Kui seda hälvet või viga ei arvestata võib navigaator oluliselt eksida kursilt. On olemas kahte liiki magnetismi teooriaid : esimene väidab, et kompass näitab alati magnetilist põhjasuunda mitte tegelikku põhjasuunda . Seetõttu piloodid ja meremehed eksivad ja kaovadki jäljetult . Teise teooria järgi on Bermuuda kolmnurgas erakorraline magnetjõud, mis ajab kompassi niinimetatud hulluks ja sinna sattunud kaotavad seega orientiiri. Üks suuremaid ja enimkajastatud Bermuuda Kolmnurga õnnetusi oli Lend 19 , viie USA mereväe hävituslennuki kadumine õppelennu ajal Fort Lauderdalest Floridasse 15. Detsembril 1945. aastal
võimalik kergesti ja lihtsalt ja ilma moonutusteta üle kanda pika vahemaa taha, on kergesti transformeeritav, võimendatav ja küllalt kõrge kasuteguriga, on võimalik muundada teisteks energialiikideks. Elektrilised andurid, mis muundavad mitteelektrilised suurused ekvivalentseks EMJ või pinge väärtuseks nimetatakse generaatoranduriteks. Magnetoelastsed andurid Magnetoelastsete andurite tööprintsiip põhineb ferromagnetiliste materjalide omadusel muuta magnetilist läbitavust sõltuvalt nende deformatsioonist või mehaanilistest pingetest. Nende andurite tundlikkuse tegur võib olla 200 300. Magnetoelastsed andurid jaotatakse: Drosselanduriteks Transformaatoranduriteks Magnetoelastsete andurite eeliseks on kõrge tundlikkus ja suurte koormuste ja jõudude mõõtmise võimalus (tuhanded tonnid).Puuduseks jääkdeformatsioon ja magnetilise läbitavuse sõltuvus temperatuurist. Transformaatorandurid ehk Trafoandur
1 Nimi: ........................................ Kaardi põhjasuund jääb alati raami ülemisele poolele. 2 Nimi: ........................................ Kompass Kompass on seade, mis näitab magnetilist põhjasuunda kohapeal ja liikumise ajal. Kompass võib olla tööpõhimõttelt kas magnetkompass, GPS-kompass või gürokompass. Gürokompassid (vurrkompassid) on massiivseimad, leides kasutamist sõidukites ja toimivad mehhaaniliselt. GPS-kompassid töötavad globaalse kohamäärangu satelliitsidesüsteemi toel ning on tavaliselt elektrooniliste GPS-seadme üheks lisafunktsiooniks. Magnetkompass on lihtsaim ja odavaim kompass, mida peab
Suurem osa kõrgahjudes toodetud malmist kulub terase tootmiseks. Teras sisaldab süsinikku alla 1,7% ja terase tootmisel on põhiprotsessiks süsiniku ülejäägi kõrvaldamine malmist. Huvitavaid fakte, hüpoteese ja paradokse rauast 1874. a. täheldas Kaasani ülikooli dotsent Smirnov, et Kurski kubermangus kaldub magnetnõel normaalasendist kõrvale. Sajandi lõpul tegi Eestist pärinev Moskva ülikooli professor E. Leist (Leyst) kindlaks, et magnetilist anomaaliat põhjustavad magnetrauamaagi hiigellademed. Teadaolevaks vanimaks raudesemeks peetakse Austria Alpidest tertsiaari kivisöekihist leitud töödeldud terasest rööptahukat ja mitut raudnaela meenutavat eset. Shotimaa söekihist leiti koguni primitiivne suurtükk. Kõik need leiud pärinevad aga ajast, mil inimest veel polnud. Mõistlikku seletust anda ei osata, kuigi on püstitatud hüpoteese, seostamaks esemete päritolu tulnukate viibimisega meie planeedil. Aastal 2900 e
Keevitusvoolu reguleerimine toimub kas trafo ülekandeteguri muutmisega või mähiste va-hekauguse muutmisega. Eraldi paispooliga trafod Sellis trafo komplekt koosneb pingemadaldustrafost ja eraldi paispoolist (drosselist). Trafo sekundaarpinge muutub kevitusvoolu muutumisel vähe. Langeva väliskarakteristiku saamiseks ühendatakse sekundaarahelasse järjetikku paispool. Keevitusvoolu reguleerimiseks muudetakse kas paispooli magnetilist takis-tust tema südamiku liigutamisega või pooli keerdude arvu muutmisega. Viimasel juhul on reguleerimine astmeline.
püsttelje ja meridiaani vahelist nurka, kusjuures see nurk on positiivne sel juhul, kui meridiaan kaldub põhjasuunas vasakule ning negatiivne, kui ta kaldub paremale. Magnetnõela kääne e. deklinatsioon on nurk tõelise ja magnetilise asimuudi vahel. Inklinatsioon tähistab tõelise ja magnetilise meridiaani vertikaalivahelist erinevust. Bussool on kraadideks jaotatud ringi või ringiosadega ning viseerimisseadistega magnetkompass, millega mõõdetakse maastikul magnetilist asimuuti: a) ringbussool koosneb limbist ja mgnetnõelast. b) orientiirbussool magnetilise meridiaani näitab ainult suunda Pindobjektid kujutatakse õiges mõõtkavas veidi vähendatult, üksteisest kontuurjoonega, täidetakse pindleppemärkidega. Joonobjektid on looduslikud ja tehnilised joonelised objektid, sõltuvalt kaardi mõõtkavast, võivad leppemärgid olla sama suurusega. Punktobjektid on looduslikud või
vastupidine seda põhjustava magnetvoo muutusega. Eneseinduktsiooni nähtus voolutugevuse muutumine juhtmes tekitab sellessamas juhtmes induktsiooni elektromotoorjõu. Lihtsamalt öeldes näitab induktiivsus vaadeldava juhtmesüsteemi inertsust temas toimuvate voolu muutuste suhtes. Võrdetegur L kontuuri induktiivsus kirjeldab magnetvoo olenevust kontuurist, selle kujust, mõõtmetest, keskkonna magnetilistest omadustest. VALEM: KASUTUS: Kõlarites ja mikrofonides kasutatakse magnetilist induktsiooni, et kas vastavalt muuta voolu muutus mehaaniliseks liikumiseks või mehaaniline liikumine elektrisignaaliks. SPIDOMEETER, INDUKTSIOON PLIIT, METALLI DETEKTOR, LENNUJAAMA TURVAVÄRVAD. 10)POOLJUHID JA ELEKTROLÜÜDID Pooljuhid erinevad metallidest suurema eritakistuse ja selle ümberpööratud temperatuurisõltuvuse poolest. Pooljuhtmaterjalide eritakistus oleneb eelkõige: koostisest (väga olulised on lisandid) § valmistamise tehnoloogiast
juhtmed võivad olla väiksema ristlõikega. Trafo eesmärgiks ongi muundada mingi pingega vahelduvvoolu elektrienergiat sama sagedusega, kuid teistsuguse pingega vahelduvvoolu energiaks. Trafol on vähemalt kaks mähist, mis asetsevad ühisel terassüdamikul. Mähist, mis on ühendatud energiaallikaga, nim primaarmähiseks. Teist mähist ,mis annab energiat tarbijale, nim sekundaarmähiseks. Südamiku eesmärgiks on suurendada magnetilist sidet primaar ja sekundaarmähise vahel. Kui primaarmähisele rakendada vahelduvpinge, siis tekib terassüdamikus vahelduv magnetvoog, mis indutseerib primaarmähises vastuelektromotoorjõu. Sama magnetvoog on aga aheldatud ka sekundaarmähisega ja indutseerib selles elektromotoorjõu 6 54. Elektrimootori tööpõhimõte.
orbitaali) omadused on nende kvantarvudega määratud. - Peakvantarv (n), mis määrab ära elektronkihi, milles elektron asub, määrab energianivoo, kuhu elektron kuulub. Orbitaalkvantarvu (l;0,1,...,n-1). Määrab alanivoo, kuhu elektron kuulub ja ka vastava lainefunktsiooni ruumilise kuju (s, p, d, f). Magnetkvantarv (ml;l,l-1,...,-l), määrab orbitaali ruumilise orientatsiooni. Spinn(ms;1/1;-1/2), iseloomustab elektroni magnetilist momenti, näidates ära, kas elektroni magnetmoment on magnetvälja suunaline või sellega risti. Elektron võib olla aatomis olla kahes spinnolekus, mida sageli tähistatakse kas , või ja . Nt: n=2; l=0,1;ml=-1,0,+1. 5. Kirjeldage vesinikusarnase aatomi 1s-, 2s- ja 3s-aatomorbitaalidel paiknevale elektronile vastavat elektrontiheduse jaotust ruumis. Joonistage vastavate jaotuste graafikud. Samal kaugusel on sama elektrontihedus
korral, kuna peale ümbermagneetimiskadude sõltuvad kaod ka ümber- magneetimise sagedusest ja vahelduvvoolu võrgu seadmetest, trafodes,releedes. on kitsas hüstereesisilmus (väike koert- sitiivjõud HC < 400 A/m) , suur magnetiline läbitavus. 2.)Kõvamagnetmaterjalidel, kasutatakse tavaliselt püsimagnetina, on suur remanents ja suur koertsitiivjõud (lai hüstereesisilmus) 48.Kuidas tähistatakse ja mis ühikutes mõõdetakse materjalide magnetilist läbitavust (µ), väljatugevust (-H) ja induktsiooni (voolutihedust)(-B)? 1.)Magneetiline läbitavus µ [H/m] henri 2.)Magnetvälja tugevus Tähistatakse H [A/m] 3.)Magnetvoo tihedus (induktsioon) B [T] tesla 49.Millised magnetilised omadused ja milline koostis on sulamil permalloid, alsifer jt? Seadmetes, kus on vaja suurema magnetilise läbitavusega, väiksemate kadudega jne. materjale (väiketrafod, helisagedustrafod, impulsseadmed, magnetvõimendid jne
Suhtelina magnetiline läbitavus- magnetväli võib välismagnetvälja nii tugevndada kui Baines µ= ka nõrgnedada. Bvaakum Paramagneetikud >=1, Diamagneetikud <=1, ferromagneetikud >>1, ferromagneetikud säilitavad magnetilise kadumisel oma välimised omadused. Näitab mitu korda on magnetvälja tihedus selles keskkonnas suurem kui vaakumis. ELEKTROMAGNETILINE INDUKTSIOON JA VAHELDUVVOOL Magnetvoog on füüsikaline suurus, mis näitab magnetilist suutlikust läbida vaadeldavat pinda Tähis: (Fii) Ühik: 1 Wb (veeber) Põhivalem: kus (Fii) on magnetvoog, on pinna magnetinduktsioon on pinna pindala ja (beeta) on nurk pinna normaali ja magnetvälja suuna vahel. Elektromagnetilise induktsiooni nahtus Kinnises juhtivas kontuuris tekib magnetilise induktsiooni voo muutumisel labi selle kontuuri poolt piiratud pinna elektrivool. Induktsioonvoolu suurus on maaratud ainult voo muutumise kiirusega (d/dt) Pooriselektrivalja joujooned on
välismagnetvälja nii tugevndada kui ka nõrgnedada. Paramagneetikud >=1, Diamagneetikud <=1, ferromagneetikud >>1, ferromagneetikud säilitavad magnetilise kadumisel oma välimised omadused. Näitab mitu korda on magnetvälja tihedus selles keskkonnas suurem kui vaakumis. ELEKTROMAGNETILINE INDUKTSIOON JA VAHELDUVVOOL Magnetvoog on füüsikaline suurus, mis näitab magnetilist suutlikust läbida vaadeldavat pinda Tähis: (Fii) Ühik: 1 Wb (veeber) Põhivalem: kus (Fii) on magnetvoog, on pinna magnetinduktsioon on pinna pindala ja (beeta) on nurk pinna normaali ja magnetvälja suuna vahel. Elektromagnetilise induktsiooni nahtus Kinnises juhtivas kontuuris tekib magnetilise induktsiooni voo muutumisel labi selle kontuuri poolt piiratud
Naabertsooni koordinaatidevõrk näidatakse ainult raami kujunduses. Tänapäeva Eesti kaartidel näidatakse tihti nii Gaussi-Krügeri, UTM, TM-Balti kui ka Lambert- Est võrk. Neist kantakse kaardi pinnale erivärvidega üks või kaks, ja teised kaks kantakse ainult kaardi raamile. Maastikujoone orienteerimine võib toimuda tõelise-, magnetiliseasimuudi või direktsiooninurga järgi. Tõelist asimuuti saab looduses määrata vaid astronoomiliste vaatluste abil ja max täpsuseg 0,5''. Magnetilist asimuuti loetakse magnetilisest meridiaanist ja välitingimustes saab seda määrata bussooliga täpsusega 12'. Magnetilise meridiaani hälvet tõelisest meridiaanist nim deklinatsiooniks ehk käändeks. Deklinatsioon on muutuv suurus, aastane muutus ulatub 8'-ni ja ööpäevane kuni 15'-ni. Magnettormide puhul võib see hälve ulatuda mitme kraadini. Direktsiooninurgaks nim joone suuna ja ristkoordinaatide võrgu joone põhja suuna vahelist nurka
primaarmähiseks. Teist mähist, mis annab energiat tarbijale, nimetatakse sekundaarmäniseks. Primaarmähise suurused on tähistatud indeksitega 1 ja sekundaarmähise suurused tähistatud indeksiga 2. Kui U1 > U2, siis trafo on pinget madaldav, vastupidisel juhul pinget kõrgendav. Suurema nimipingega mähist nimetatakse ülempingemähiseks ning väiksema nimipingega mähist alampingemähiseks. Trafod võivad olla ühe- või kolmefaasilised. Trafo südamiku ülesandeks on suurendada magnetilist sidet primaar- ja sekundaarmähise vahel. Trafod võib jahutuse seisukohalt liigitada õhk ja õlijahutusega trafodeks. Vastavalt U1 ja U2 suhtele liigitatakse trafod: U1 > U2 pingemadaldustrafod U1 < U2 pingekõrgendustrafod U1 = U2 eraldustrafod Ideaalses trafos, kus energiakaod mähise juhtmetes ja trafo südamikus puuduvad, on primaar- ja sekundaarahelate näivvõimsused võrdsed. S1 = S2 ehk U1 x I1 = U2 x I2
Mälu jaotatakse moodulitesse, millest lugemiseks tuleb aktiveerida vastav ChipSelect sisend. Vastavalt CPUs töödeldavate mälusõnade järkudele ehitatakse andmesiinid ja mälu sõnalaiused. BIOS, mikroprogrammid 24. Magnetmälud: Mittemagneetuval alusel magneentuv substants, mille kohal liigub vooluga mähis, milles kitsas pilu. Pilust väljuv magnetväli pöörab magneetuva substantsi doomenid vastavalt voolu suunale. Lugemisel kasutatakse magnetilist induktsiooni, mille puhul doomenite pöördumiskohas genereerub lugemispeasse pingeimpulss, mis registreeritakse.Salvestamisel kasutatakse hüstereesi isegi pärast magnetvälja mõju lõppu jääb kettale teatud magneetumus. HDD: Pöörleb 3600 .. 10200 rpm Internal Transfer Rate lugemispeast andmete liikumise kiirus kontrollerile Burst TR liidese ülekande kiirus Sustained (pidev) TR keskmine kiirus CPU ja Drive'ide vahel Access time = seek time + latency
pressimine. Sorteerimine toimub kas jäätmete tekkekohas (efektiivsem) või sorteerimiskeskustes. Seda korraldatakse kas käsitsi või mehaaniliselt. Viimase puhul sorteeritakse prügi osakeste suurust, tihedust, kiirendust, optilisi omadusi, magnetilisi omadusi ja elastsust arvestades. Nendele vastavalt kasutatakse sõelumist (trummelsõel), setitamist, ballistilist sortimist, optilist separeerimist, magnetilist sortimist. Purustamine, eriti metallil, on väga energiakulukas. Pressimine vähendab jäätmete ruumala. Prügilasse ladustamise eelduseks on tihendamine.m 26 18. Olmejäätmete lõppkäitlemise viisid - Lõppkäitlemise viisid o termilised meetodid mahu ja kaalu vähendamine 800-850 °C o bioloogilised meetodid
Väikesemahuline tootmine. Ülesanded, mis vajavad kiiret, ka ebatavalistesse füüsikalistesse tingimustesse sobivat riistvara. FPGA: Kaustaja poolt programmeritav. Paindlik. Kasutab optimaalset hulka kristalli pinda. Magnetmäluseadmed Mittemagneetuval alusel magneentuv substants, mille kohal liigub vooluga mähis, milles kitsas pilu. Pilust väljuv magnetväli pöörab magneetuva substantsi doomenid vastavalt voolu suunale. Lugemisel kasutatakse magnetilist induktsiooni, mille puhul doomenite pöördumiskohas genereerub lugemispeasse pingeimpulss, mis registreeritakse.Salvestamisel kasutatakse hüstereesi isegi pärast magnetvälja mõju lõppu jääb kettale teatud magneetumus. HDD:Pöörleb 3600 .. 10200 rpm Magnet-Optiline põhimõte laser kuumutab ketta biti ala ~200 kraadini (Curie' punkt) magnet polariseerib selle. Lugemisel arvestatakse peegelduva valguse polaarsusega.
Mälu jaotatakse moodulitesse, millest lugemiseks tuleb aktiveerida vastav ChipSelect sisend. Vastavalt CPUs töödeldavate mälusõnade järkudele ehitatakse andmesiinid ja mälu sõnalaiused. BIOS, mikroprogrammid 24. Magnetmälud: Mittemagneetuval alusel magneentuv substants, mille kohal liigub vooluga mähis, milles kitsas pilu. Pilust väljuv magnetväli pöörab magneetuva substantsi doomenid vastavalt voolu suunale. Lugemisel kasutatakse magnetilist induktsiooni, mille puhul doomenite pöördumiskohas genereerub lugemispeasse pingeimpulss, mis registreeritakse.Salvestamisel kasutatakse hüstereesi isegi pärast magnetvälja mõju lõppu jääb kettale teatud magneetumus. HDD: Pöörleb 3600 .. 10200 rpm Internal Transfer Rate lugemispeast andmete liikumise kiirus kontrollerile Burst TR liidese ülekande kiirus Sustained (pidev) TR keskmine kiirus CPU ja Drive'ide vahel Access time = seek time + latency
suureks). Käivitus voolud võivad ulatuda 5 - 7 kordseni, seepärast kas. otselülitust võrku harva. Selleks kas. säästetrafot või reaktorit. Sünkroonmootori käivitamine (teine versioon) Sünkmootori käivitamine-vahetu lülitamisega ei ole võimalik kuna pöördväli ei suuda rootorit tema inertsi tõttu momentaalselt käima tõmmata-ei teki pidevat momentaalselt magnetilist sidestust.Seega kasutatakse kas abimootorit või asünkroonset käivitamist. Abimootoriga pannakse sünkroonmootori rootor käima pöördvälja kiirusega ligikaudsel kiirusel. Siis lülitatakse staator võrku ja rootori ja staatori vahel tekib magneetiline sidestus ja abimootor lülitatakse välja.Asünkroonsel käivitamisel rootor omab asünkroonset käivitusmähist.Käivitamise alghetkel rootori elektromagnetmähis on lülitatud takistile
3.3.2 Elektriväljad ja vooluringid Plasma kvaasineutraalsus nõuab, et elektrilistes vooluringides plasmavoolud sulgeksid end. Sellised vooluringid järgivad Kirchhoffi seadusi ja omavad takistust ning induktiivsust. Neid vooluringe peab üldiselt käsitlema kui tugevalt ühendatud süsteemi, kus iga plasmaregiooni käitumine sõltub kogu vooluringist. Taoline tugev ühendatus ja mittelineaarsus võivadki tekitada plasma kompleksset käitumist. Vooluringid plasmas hoiavad endas induktiivset (magnetilist) energiat ning vooluringi segamise korral, näiteks plasma ebastabiilsuse tõttu, vabaneb see energia soojuse ja kiirendusena. See ongi levinud põhjenduseks päikesekoroonades (ingl. solar corona) toimuvale soojenemisele. Elektrivoolude olemasolu on täheldatud ka virmalistes ning plasmafilamentides. 4. Isolaatorid ehk dielektrikud Dielektrik ehk mittejuht ehk isolaator on väga väikese elektrijuhtivusega aine või ainete
erinimelised tõmbuvad. Pooluste nimetused on tulnud sellest, et ka Maal avastati magnetilised omadused. Maa magnetilisi omadusi saab uurida magnetnõela abil. Väikest pöördumisvõimelist püsi- magnetit nimetatakse magnetnõelaks. Magnetnõel näitab alati ühe otsaga põhja, teisega lõunasse. Maa on üks suur püsimagnet, mille magnetiline põhjapoolus asub geograafilise lõunapooluse lähedal ja magnetiline lõunapoolus asub geograafilise põhjapooluse lähedal (ca 1000 km kaugusel). Magnetilist vastastikmõju seletatakse magnetväljaga. Magnetvälja saab "nähtavaks teha" rauapuru abil, mis toob esile magnetvälja jõujooned. Jõujoone puutuja näitab magnetnõela põhjapoolusele mõjuva jõu suunda. Magnetvälja jõujooned on kinnised kõverad, st neil pole algust ega lõppu. See ei luba ka rääkida magnetlaengutest. Niisugust välja, mille jõujooned on kinnised, nimetatakse pöörisväljaks. Väljaspool
Jooniste ja visandite sisestamiseks mõeldud seade koosneb tavaliselt tahvlikesest (aluslauast) ja litri taolisest kursorseadmest või nõelataolisest sulepeast. Litter on niitristiga varustatud luubitaoline seade, mis võimaldab positsioneerida punkti ülitäpselt. Nõelsulepea kasutab tindiasemel elektroonilist otsikut. Magnetkirjalugeja - seade ja meetod arendati välja 1950. aastail pangadokumentide jaoks. Magnetkiri kujutab endast klaarteksti magnetilist varianti. Kirjamärgid kantakse andmekandjale (pangakaardile) magnetilist ainet sisaldava tindiga (trükivärviga) ning nende lugemist teostatakse erilise MIRC lugeja-sorttiirmasina abil. Magnetkaardilugeja - magnetribaga varustatud kaart on sarnane standardse magnetlintseadmega, kuid on mõeldud suhteliselt väikeste andmehulkade salvestamiseks. Valguspliiats on selline sisendseade, mille põhiosaks on pliiatsitaoline ja valgustundliku otsikugapulk
Rootor on valmistatud ferromagnetilistest lehtedest nii, et tal on ühes kindlas suunas magnetiline läbitavus kordi suurem, kui teistes suundades. Seetõttu magnetvoog staatori primaarmähisest läbistab staatori kolmefaasilise sekundaarmähise nurga all, mis sõltub rootori asendist ruumis. See põhjustab samasuguse efekti kui rootoril asetsevate sekundaarmähiste puhul Magnetoelastsed andurid. Magnetoelastsete andurite tööprintsiip põhineb ferromagnetiliste materjalide omadusel muuta magnetilist läbitavust μ sõltuvalt nende deformatsioonist või mehaanilistest pingetest. Magnetoelastsete andurite südamike materjalideks võib olla nikkel, nikli ja raua sulam (63%Ni, 37% Fe), aga samuti transformaatoriteraste sordid. Nende andurite tundlikkuse tegur võib olla 200 – 300, seega on nad väga suure tundlikkusega. Magnetoelastsed andurid jaotatakse drosselanduriteks (joonis 0.2.10a) ja transformaatoranduriteks (joonis 0.2.10b). Anduri mehaanilisel mõjutusel jõuga P muutub südamiku
Kiirelt liikuvate kujutiste ülekandmiseks on kiire liikumise kiirus väga suur. Samal põhjusel peab ekraani järelhelenduse kestus olema piisavalt lühike (<0,l s). Sealjuures on nõudeks,et helenduv täpp oleks väike ja säilitaks oma teravuse igas ekraani punktis. Kineskoobi ekraan peab olema küllalt suur ja ristkülikulise kujuga. Et kineskoop ei kujuneks suure ekraani korral liiga pikaks, kasutatakse suuri hälvitusnurki ja seepärast kasutataksegi kineskoopides seni eranditult magnetilist hälvitussüsteemi. Lineaarse laotuse saamiseks peab hälvitussüsteemi poole läbima hammasvool. Laotuseks vajaliku homogeense magnetvälja saamiseks on mähised küllaltki keeruka kujuga ja nende toimet korrigeeritakse veel ka püsimagnetitega, mis paiknevad kineskoobi kaelal. Fokuseerimissüsteemis kasutatakse kineskoopidel kiirendusanoodiga süsteemi, kusjuures esimest anoodi nimetatakse teravduselektroodiks. Ekraanidena kasutatakse alumineeritud ekraane, mille iga on pikem