Joonis 7 Pinged jagunevad normaalpingeteks ja tangentsiaal- ehk nihkepingeteks, neid väljendatakse joon-, tasand- ja ruumpinguse abil. Iga peapinge põhjustab elementaarristtahuka pikenemise selle pinge sihis ja ahenemise selle ristsihis. Pingete arvutamiseks mingis kindlas punktis võtame appi lõpmata väikese suurusega elementaarristtahuka. Mingis kindlast punktis esinevatest pingetest annab meile selge pildi ka Mohri ring. Kasutatud kirjandus: Lellep, K. (2011). Paigutis ja deformatsioon. Allikas: Tehnilise mehaanika põhialused: http://ekool.tktk.ee/ Lellep, K. (2011). Pinge. Allikas: Tehnilise mehaanika põhialused: http://ekool.tktk.ee/ Metsaveer, J., & Raukas, U. (2001)
10) v (t ) = v + a t x 0x x Sarnased võrrandid kirjutame ka koha- ja kiirusvektorite y- ja z-telje sihiliste komponentide jaoks. Need lubavad algtingimusi algasukohta, algkiirust ja kiirendust teades arvutada keha koordinaadid mistahes ajahetkel t. Elimineerides võrranditest (1.10) aja, avaldades selle süsteemi (1.10) alumisest võrrandist ja asendades tulemuse ülemisse võrrandisse, saame aega mittesisaldava liikumisvõrrandi x-telje sihis: 2a x x = v x2 - v02x . (1.11) Pannes kirja samasugused võrrandid ka x- ja y-telje sihis, jõuame ühtlaselt muutuva sirgjoonelise liikumise aega mittesisaldava vektorvõrrandini 2a r = v 2 - v 02 . (1.12) 1.2 Kiiruste liitmine
y2z2= osakujundi nr 2 kesk-peateljestik 2.2 Liitkujundi pinnakeskme asukoht Liitkujundi staatiline moment telje z' suhtes A = Liitkujundi pindala = Liitkujundi staatiline moment telje y' suhtes 2.3 Liitkujundi staatilised momendid (1) Liitkujundi staatiline moment telje z ' suhtes = Osakujundi nr 2 staatiline moment telje z' suhtes = Osakujundi nr 1 staatiline moment telje z' suhtes Osakujundite staatilised momendid = Osakujundi nr 1 pinnakeskme C1 koordinaat telje y' sihis = Osakujundi nr 2 pinnakeskme C2 koordinaat telje y' sihis Osakujundite pinnakeskmete koordinaadid =0 =+ 2.3 Liitkujundi staatilised momendid (2) Liitkujundi staatiline moment telje z ' suhtes = Osakujundi nr 2 staatiline moment telje z' suhtes = Osakujundi nr 1 staatiline moment telje z' suhtes Osakujundite staatilised momendid = Osakujundi nr 1 pinnakeskme C1 koordinaat telje y' sihis
y2 z2= osakujundi nr 2 kesk-peateljestik 2.2 Liitkujundi pinnakeskme asukoht Liitkujundi staatiline moment telje z' suhtes A = Liitkujundi pindala = Liitkujundi staatiline moment telje y' suhtes 2.3 Liitkujundi staatilised momendid (1) Liitkujundi staatiline moment telje z ' suhtes = Osakujundi nr 2 staatiline moment telje z' suhtes = Osakujundi nr 1 staatiline moment telje z' suhtes Osakujundite staatilised momendid = Osakujundi nr 1 pinnakeskme C1 koordinaat telje y' sihis = Osakujundi nr 2 pinnakeskme C2 koordinaat telje y' sihis Osakujundite pinnakeskmete koordinaadid =0 =+ 2.3 Liitkujundi staatilised momendid (2) Liitkujundi staatiline moment telje z ' suhtes = Osakujundi nr 2 staatiline moment telje z' suhtes = Osakujundi nr 1 staatiline moment telje z' suhtes Osakujundite staatilised momendid = Osakujundi nr 1 pinnakeskme C1 koordinaat telje y' sihis = Osakujundi nr 2 pinnakeskme C2 koordinaat telje y' sihis
laine levimissuunaga risti, näiteks lained veepinnal. A z v x -A Joonis leheküljel kujutab x-telje sihis levivat lainet veepinnal. Veepinna molekulid võnguvad z-telje sihis, võnkumine kandub edasi kiirusega v . Pidev koosinusoid kujutab pinnamolekulide asendit vaadeldaval ajahetkel, nooled nende liikumissuundi, katkendlik koosinusoid nende asendit järgneval ajahetkel. Jooniselt on näha, et laineharjad ja põhjad liiguvad seetõttu kiirusega v paremale. Kui koordinaatide alguspunktis asuks laineallikas, siis
keha mõjutavad üksteist jõududega,mis on vastupidised samal sirgel. 6. Seose mõiste ja liigid (sile pind, niit, varras, silindriline sarniir). Keha, mille liikumist takistavad teised kehad, on seotud ehk mittevaba keha. Igasugust liikumise tõket on tavaks nimetada sidemeks ehk seoseks. Jäik keha hõõrdevabal pinnal, sile pind keha ja pinna kontaktpunkt saab mööda pinda vabalt libiseda, kuid tõkestatud on liikumine pinna normaali sihis. Reaktsioon on suunatud kokkupuutuvate pindade ühise normaali sihis. Hõõrdevaba keha toetub teravikule. Et teraviku liikumine keha suhtes on tõkestatud ainult keha normaali sihis, siis on reaktsioon suunatud piki keha normaali. Keha toetub pöörduvale kaalutule vardale. Varras tõkestab keha liikumist oma telje sihis; selles sihis mõjub ka varda reaktsioon FA. Pöörduva vardaga samade omadustega on painduv niit, kuid
F2 = 2f = 2*624 = 1248 N 2.2.3 Võlli painutavad koormused Suurema rihmaratta painutav koormus Väiksema rihmaratta painutav koormus 2.2.4 Võlli keskpeatasandite valik Koormuste komponendid telgedel y ja z Kuna = 160 ning ka jooniselt on loetav: ja.. 3. Võlli sisejõudude analüüs 3.1 Väändemoment Arvestatud ei ole laagrite höördemomente 3.2 Paindemoment kesk-peatasandis xy (1) Varda toereaktsioonid y telje sihis Leitakse (tegelikkuses joonisega võrreldes vastupidise märgiga) Vastus tuleb negatiivne kuna rihmaratta A jõud mõjuvad zx tasapinna suhtes paralleelselt, kuid rihmaratta B jõud zx tasapinnast ülespoole. Leitakse (tegelikkuses joonisega võrreldes vastupidise märgiga) 3.2 Paindemoment kesk-peatasandis xy (2) Varda paindemomendid telje z sihis Varda otstes põõrdemomente ei teki, paindemoment M ei teki Paindemomendi epüür
Arvutusvalmid erijuhtude jaoks: 1) Konstantne väändemoment konstantse ristlõikega vardas 2) Astmeliselt muutuv vändemoment või varda ristlõige 3) Keerukalt muutuv väändemoment konstantse ristlõikega vardas. 4) Pidevalt muutuva ristlõikega vardal (Mitte ümarvarda väändedef) Iseloomustamiseks väände inertsmoment ristkülikristlõike jaoks I t=kthb3 Õhukese seinalise suletud ristlõike jaoks. Lõikedef: Väljendub ristlõigete asukoha muutumisena varda telje sihis, millega varda telg omandab esialgse asendi suhtes kalde. Lõikedef. Intensiivsus ehk lõikeprinkus. Tavaliselt piirdutakse lõikedeformatsiooni iseloomustamisega keskmise lõikeprinkuse abil. Korrutis on lõikejäikus GA red(x) Erijuhtude seosed: 1) Konstantne põikjõud konstantse ristlõikega vardas 2) Atmeliselt muutuv põikjõud või varda ristlõige 3) Keerukalt muutuv põikjõud konstantse ristlõikega vardas 4) Pidevalt muutuva ristlõikega vardal Varda telje siirded
Painutatud vardaid nimetatakse taladeks. Joonis 1. Varda põhideformatsioonid 1. Kogupinge avaldub normaal- ja tangentsiaalpinge kaudu valemiga p = 2 + 2 . Kogupinget pole aga otstarbekas kehas mõjuvate sisepingete hindamiseks kasutada, sest paljud materjalid taluvad normaal- ja tangentsiaalpingeid erinevalt, mistõttu tugevusõpetuses vaadeldakse neid eraldi. Kui normaalpinged püüavad keha üksikuid osakesi lõikepinna normaali sihis lähendada või eemaldada, siis tangentsiaalpinged püüavad neid osakesi lõikepinnas üksteise suhtes nihutada. Seetõttu nimetatakse tangentsiaalpingeid ka nihkepingeteks. Nihke- ehk tangentsiaal- ehk puutepinge on mõiste tugevusõpetusest, mis tähendab lõikepinna sihis mõjuvat pingekomponenti. Nihkepinge on vektoriaalne suurus ning tähistatakse tugevusarvutustes . Nihkepingete paarsuse seadus on seadus tugevusõpetuses, mille kohaselt kahel omavahel
lõikepunktide arvu. *esimest järku joon on sirge *2.järku joon kas ellips, hüperbool, parabool *3.järku joon näiteks strofoid, tsissoid *4.järku näiteks konhoid Algebralise ruumikõvera järgu määrab selle kõvera ja tasandi lõikepunktide arv. Teist järku jooned: ellips(ringjoon), hüperbool(risthüperbool), parabool. Kruvijooned kruvijooned on ruumikõverad. Lliigitatakse: *paremakäelisteks (telje sihis pöörlemisega päripäeva) *vasakukäelisteks (telje sihis pöörelemisega vastupäeva) Kruvijoon on määratud, kui on teada tema raadius(r), samm(h) ja käelisus. Silindriline ehk harilik ja kooniline kruvijoon. Silindriline kruvijoon on pöördsilindri moodustajat mööda ühtlaselt liikuva punkti trajektoor, kui silnder pöörleb ühtlaselt ümber oma telje. Kruvijoone osa, mis vastab punkti ühele täispöördele ümber kruvijoone telje, nim kruvijoone keeruks. (Silindri telg = kruvijoone telg ; silindri raadius = kruvijoone raadius)
suund või mõlemad. Et pöörleva keha punkti kiirus muudab pidevalt suunda, siis ka ta kiirendus erineb nullist. Kiirenduse arvutamiseks vaatleme ratast, mis pöörleb ühtlaselt vastupäeva nurkkiirusega = const . Valime paigaloleva koordinaatteljestiku selliselt, et ta alguspunkt asuks pöörlemisteljel ja z-telg oleks pöörlemistelje sihis. Siis ratta mingi punkti koordinaadid ( x, y , z ) kui tema kohavektori r vastavad komponendid avalduvad järgneva joonise põhjal: x = r cos , y = r sin , z = 0 , kus r kui kohavektori r moodul on selle punkti kaugus pöörlemisteljest. Et ühtlasel pöörlemisel valemit (2.4) arvestades saame =t , siis ratta punkti trajektoori võrrand esitub kujul x = r cos( t ) y = r sin( t ) . (2.11)
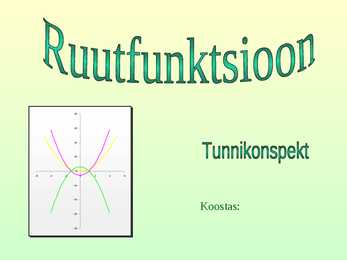
Nullkoht on punktis ( 0 ; 0 ) -10 Haripunkt on punktis ( 0 ; 0 ) Ruutfunktsioon y = ax² + c Ruutliikme kordaja on a 25 y Graafikut nimetatakse PARABOOLIKS 20 15 Graafik on nihutatud y telje sihis C ühikut ÜLES, kui c > 0 10 Graafik on nihutatud y telje sihis 5 x C ühikut ALLA, kui c < 0 0 -6 -4 -2 0 2 4 6 -5
Seega on ka magnetväli pöörisväli. Sirgmagneti jõujooned · Magnetvälja jõujoonte joonestamiseks saame kasutada magnetnõelu. · Kuna magnetinduktsiooni vektori suund ühtib magnetnõela põhja-lõuna suunaga, siis kasutame magnetnõela telje sihti jõujoonte puutujate joonestamiseks. · Magnetvälja jõujooni on võimalik ka reaalsuses visualiseerida kasutades selleks peenikest raua vm ferromagneetiku puru. Rauaosakesed magneetuvad ning asetuvad magnetvälja jõujoonte sihis. Siiski tuleb siinkohal rõhutada, et me ei näe mitte jõujooni endid vaid nende sihis asetunud rauapuru. Pilt ja video https://www.youtube.com/watch?time_continue=8&v=85LeyTRQ_Ow Tänan kuulamast!!!
Homogeenses keskkonnas on valguskiired alati sirgjooned. 3. Miks ei ole võimalik valguskiiri vaadelda? mida saame vaadelda? Igapäevaelus saame jälgida mitte valguskiiri, mis on mõttelised jooned, vaid valgusvihkusid, mis oma olemuselt kujutavad paljudest valguskiirtest koosnevaid kimpe 4. Kirjelda koonduvat valgusvihku (kiirte abil, vihus sisalduva energia abil) Koonduvas valgusvihus lähenevad kiired üksteisele. Valgusvihus kiirte sihis edasi liikudes (valgusallikast eemaldudes) suureneb vihus sisalduv pinnaühikule langeva valgusenergia hulk. 5. Kirjelda hajuvat valgusvihku Hajuvas valgusvihus eemalduvad kiired üksteisest. Valgusvihus kiirte sihis edasi liikudes (valgusallikast eemaldudes väheneb vihus sisalduv pinnaühikule langeva valgusenergia hulk. 6. Kirjelda paralleelset valgusvihku Paralleelses valgusvihus asuvad kiired üksteisest igal pool ühekaugusel.
LAINED Laineks nimetatakse ruumis levivat häiritust, nt lööklaine. Mehaanilised lained vajavad levimiseks keskkonda, elektromagnetilised lained ei vaja. Kui häiritus on perioodiline, siis on ka laine perioodiline Ruumis levivat harmoonilist võnkumist nimetatakse sinusoidaalseks laineks. On olemas ristlained, mil võnkumine on risti laine levimise suunaga, ja pikilained, mil võnkumine toimub laine levimise sihis. Et sinusoidaalse laine põhjus on harmooniline võnkumine, siis iseloomustab lainet samamoodi nagu võnkumistki sagedus (f), ringsagedus ( ), amplituud (r) ja periood (T). Lisaks võnkumist iseloomustavatele suurustele iseloomustab lainet veel lainepikkus kaugus kahe samas faasis võnkuva punkti vahel. Järgnev joonis on lainepikkuse ja perioodi mõistete selgituseks. Joonisel toimub osakeste võnkumine y-telje suunas ja laine amplituudi tähis on A.
Lineaarselt polariseeritud valgusega on tegemist siis, kui elektrivälja tugevus muutub ainult ühes kindlas sihis. (Lubatud on ainult üks kindel võnkesiht). Sellega on tegemist siis kui kiirte intensiivsused on erinevad, või faasinurk on erinev täisnurgast.
5,73 A D B RAZ 16,55 RBZ Selleks koostame tasakaaluvõrrandid F = 0 kz RAz + 16,55 + RBz - 5,73 = 0 M A ( Fk ) = 0 - 0,6 RBz + 0,9 5,73 - 0,3 16,55 = 0 millest RBz = 0,32 kN RAz = -11,14 kN Jõudude jaotus z-telje sihis 5,73 11,14 A D B 16,55 0,32 Epüür sisejõu Q z jaoks 5,73 5,41 Qz 11,14 Määrame laagrite reaktsioonikomponendid RAY ja RBY 9,56 A D
horisontaalkomponendi määramiseks. (Maa magnetvälja horisontaalkomponendi all mõeldakse selles töös Maa magnetvälja magnetilise induktsiooni horisontaalkomponenti.) Selles töös kasutatav tangensgalvanomeeter koosneb nelja keeruga poolist, mille horisontaalsele teljele on asetatud kompass (joonisel 8.2 on esitatud katseseadme horisontaalne läbilõige). Voolu puudumisel poolis on magnetnõel orienteeritud Maa magnetilise meridiaani sihis. Kui läbi pooli lasta alalisvool, siis magnetnõelale mõjub peale Maa magnetvälja veel ka pooli magnetväli ja magnetnõel orienteerub summaarse magnetilise induktsiooni sihis. Erisuunaliste magnetiliste induktsioonide liitmine on matemaatiliselt lihtsam siis, kui nad on teineteisega risti. Kuna pooli magnetiline induktsioon on pooli tsentris paralleelne pooli teljega, siis on otstarbekas pooli telg pöörata Maa magnetilise meridiaantasandiga risti (joonis 8.2). 2. Töö käik
külgmikel), panin need karpi ja korrastasin töökoha. 10. Esitan töö aruande õppejõule. Kasutatud mõõteriistad ja seadmed: Nr. Nimetus Mõõtepiirkond Täpsus 1. Siseindikaator 6-1000 mm 0,02 mm 2. Nihik 0-160 mm 0,05 mm 3. Metalljoonlaud 0-500 mm 0,1 mm Tegelik kuju sihis II-II Tegelik kuju sihis I-I Mõõteskeem:
Samasihilisteks ehk kollineaarseteks ehk paralleelseteks nimetatakse vektoreid, mis asetsevad ühel ja samal sirgel või paralleelsetel sirgetel. Vektorid on võrdsed, siis kui nad on võrdsete pikkustega, kollineaarsed ja samasuunalised. Vastandvektorid on vektorid, mis on võrdse pikkusega, samasihilised kuid vastassuunalised. Vektorit tasandil saab esitada arvupaari abil, milles olevaid arve nimetatakse koordinaatideks. Esimene koordinaat näitab, kuidas tuleb liikuda x-telje sihis, et jõuda vektori alguspunktist lõpp-punkti. Teine koordinaat näitab, kuidas tuleb liikuda y-telje sihis, et jõuda vektori alguspunktist lõpp-punkti. Vektoreid saab liita algebraliselt ja geomeetriliselt. Kahe vektori liitmisel algebraliselt tuleb vektorite vastavad koordinaadid liita, tulemuseks saadakse vektor. a + b ( ax + bx ; ay + by ) Geomeetrilisel liitmisel kasutatakse kolmnurgareeglit ja rööpkülikureeglit. Rööpkülikureegel: Vektorid rakendatakse ühisesse alguspunkti
Joonis 3. Võlli ristlõigete keskpeateljed 3. Võlli sisejõudude analüüs 3.1 Väändemoment Väändemomendi epüüri koostan lõikemeetodit kasutades (arvestamata jätan laagrite hõõrdemomendid). TAB=M=21,9 Nm(-) Joonis 4. Väändemomendi epüür 3.2 Paindemoment kesk-peatasandis xy Joonis 5. Varda toereaktsioonid y telje sihis Paindemomendi epüüri koostan lõikemeetodiga. Varda paindemomendid telje z suhtes: Kuna varda otstes pöördemomente ei mõju, siis punktide A ja B pöördemoment võrdub nulliga. M Az=0 M Bz=0 +¿ M Ez=F Ay∗AE=365,1∗0,16 ≈ 58,5 Nm ¿ −¿ M Cz=F B∗CB=365,1∗0,32≈ 116,9 Nm ¿ Joonis 6. Varda paindemomendid z-telje suhtes 3.3 Paindemoment keskpeatasandis zx Joonis 7
Need omakorda jälle oma naabrid jne. Veeosakestel on kõigil teatud inertsus ja sellepärast ei hakka nad liikuma silmapilkselt. Laineallikast kaugemates punktides tekkiv võnkumine jääb laineallikaga võrreldes sellest ajast maha. Nii ei hakkagi vee kogu pind korraga ühes taktis liikuma, vaid võnkumine kandub laineallikast eemale kõikides suundades lõpliku kiirusega. Pikilaine Pikilaine on laine, milles võnkumine toimub laine levimise sihis. Pikilained võivad tekkida gaasides, vedelikes ja tahketes kehades, ristlained aga niisugustes tahketes kehades, milles deformatsioon põhjustab elastsusjõu tekke, ja vedelike pinnal pindpinevusjõudude toimel. Pikilaine on ka näiteks helilaine. Lainete liigitamine kuju järgi. Pinnalaine Pinnalained on lained, mis tekivad tahke keha, vedeliku või gaasi pinnal. Pinnalainete seas on seismilised pinnalained, akustilised pinnalained, tuulelained, raskuslained ja kapillaarlained.
kuna mõõtmete muutus on väga väike. Jõudude mõju sõltumatuse printsiip: kehale jõusüsteemi rakendamise tulemus võrdub süsteemi üksikjõudude rakendamise tulemuste summaga v=v1+v2 Arvutusskeem: uurimisobjekti lihtsustatud skeem, kuhu jäetakse vaid olulised omadused ja toed taandatakse põhiliste kokkuleppelistele. 1. Liikuv liigendtugi kõrvaldab konstruktsiooni ühe liikumisvõimaluse, mille sihis mõjub jõud. 2. Liikumatu liigendtugi takistab konstruktsiooni liikumist kahes sihis. 3. Kinnistugi kõrvaldab kolm liikumisvõimalust. Idealiseeritud materjali mudel: ühtlane, pidev, isotroopne ja elastne Ühtlane aine sõltumata mahust omadused samad. Pidev aine tühimiketa; saab kasutada integraal- ja diferentsiaalarvutusi. Isotroopne omadused ei sõltu suunast. Elastne - koormuse eemaldades kuju ja mõõtmed taastuvad. Hooke´i seadus: traadi pikenemine l on materjali elastse käitumise piirides võrdeline selleks
263 - 275 M+5+2+1+H 525 - 538 M+6+5+4+H 275 - 288 M+6+H 528 - 550 M+6+5+4+1+H 288 - 300 M+6+1+H 550 - 563 M+6+5+4+2+H 300 - 313 M+6+2+H 563 - 575 M+6+5+4+2+1+H 313 - 325 M+6+2+1+H 575 - 588 M+6+5+4+3+H 325 - 338 M+6+3+H 588 - 600 M+6+5+4+3+1+H 5. Mõõtsin rõnga siseläbimõõdu kahes ristuvas sihis (I I ja II II). Mõõteriista kõigutasin kahes ristuvas pinnas, et veenduda suurima läbimõõdu asendis. Kontakti tihedus pidi olema samasugune, kui nulliseadmisel (paras naksumine). Sisekruviku kõigutamine mõõtmisel 6. Keerasin kinni trumli kinnituskruvi ja võtsin mõõteriista detailist välja. Võtsin kruviku lugemi. Saadud lugem tuli liita valitud mõõtekomplekti vähimale mõõtepiirile.
TTÜ KURESSAARE KOLLEDZ KODUTÖÖ nr. 2 Sisejõudude süsteem ja epüürid Juhendaja: emeriitprofessor Maido Ajaots Kuressaare 2012 Kood: 111972 Arvutan algandmed. ° = (16,5 + 7 * 1,5)° = 27° Xp = (3,475 - 7 * 0,275) = 1,55 m XF2 = (3,5 + 2 * 0,1) = 3,7 m XF3 = (4,75 + 2 * 0,075) = 4,9 m M = (1 + 2 * 0,5) = 2 kNm Leian tasapinna sihis mõjuva jõu (Fpike). Leian ülessuunas mõjuva jõu. Leian rõhu tekitatud jõu pikkuse pinnal. Xr = 4,9 1,55 = 2,45 m Leian rõhu tekitatud jõu. F = 4 * 2,45 = 9,8 kN Leian kogu ülalt alla mõjuva jõu (ilma momendita). 9,8 + 4 + 6 11,345 = 8,455 kN Leian resultantjõu lõigul Xf2 (ilma momendita). R2 = 22,5752 + 11,3452 = 638,34 R = 638,34 25,3 kN 2 Talale mõjuvad jõud ja moment Jõudude epüür Momendi epüür 3
Jagamispeaga saab toorikut pöörata neli- ja kuuskantide freesimisel, hammas- ja ketirataste valmistamisel ja kruvisoonte freesimisel. Nende pinkide töölaud koos ristkelguga paikneb konsoolil. Konsool on karbikujuline valatud detail, millel on vertikaalsed ja horisontaalsed juhtpinnad. Ta toetub jalale, milles asub teleskoopiline kruvi tema tõstmiseks ja allalaskmiseks.Töölaud toetub ristkelgu juhtpindadele ja seda saab nihutada kolmes sihis: piki-, rist- ja püstsihis. Ristkelk on vahelüliks konsooli ja pingi töölaua vahel. Konsoolfreespingid jagunevad: *horisontaalfreespinkiteks ( mittepööratava töölauaga ), *universaalfreespinkideks ( pööratava töölauaga ) *vertikaalfreespinkideks *laia universaalsusega freespinkideks. Vertikaalfreespinkide alusel toodetakse kopeerfreespinke, programmjuhtimisega freespinke jt. Konsoolfreespinkidel saab detaile töödelda silinder-, ots-, sõrm-, ketas-, nurk-, kuju- ja
asuvad puuga ühel sirgel ja on teineteisest 30 m kaugusel. Puu latv paistab neist punktidest vastavalt 28° ja 40° all. Leia puu kõrgus. Ülesanne 23. Puu kõrguse mõõtmiseks märgiti maapinnal kaks punkti A ja B, mis asuvad puuga ühel sirgel ja on teineteisest 9 m kaugusel. Puu latv paistab neist punktidest vastavalt 22° ja 32° all. Leia puu kõrgus. C Ülesanne 24. Jõe laiuse BD määramiseks märgiti BD sihis pikkus 11 AB = 30 m. Jõe teisel kaldal vee piiril kasvav puu DC paistab punktist A 28°nurga alla ja punktist B 40°nurga all. Kui lai on jõgi ja kui kõrge on puu? 28° 40° Ülesanne 25. Jõe laiuse BD määramiseks märgiti BD sihis A B D pikkus AB = 30 m
Geomeetriline optika-on optika osa, milles uuritakse valguse levikut läbipaistvates keskkondades valguskiire mõiste alusel. valguskiir-on joon, mille sihis valgus levib. Langemisnurgaks nimetatakse nurka, mis moodustub langeva kiire ja langemispunktist peegelpinnale tõmmatud ristsirge vahel. Valguse murdumine on valguskiirte suuna muutumine nende läbiminekul kahe keskkonna lahutuspinnast. Murdumisnurk on nurk murdunud kiire ja keskkondade lahutuspinnale langemispunktist tõmmatud ristsirge vahel. prisma-ruumiline kujund ehk keha, millel on kaks põhitahku, mis on omavahel võrdsed ja asuvad paralleelsetel tasanditel.
a) üleslennu aeg võrdub allalangemise ajaga, b) keha langeb maapinnale sama kiirusega, millega ta sealt üles visati. 2. Kõverjooneline liikumine-Vektorkujul või komponentkujul kirjutatud liikumisvõrranditel on see eelis, et nende abil on võimalik kirjeldada ka kõverjoonelist liikumist. Selleks lahutatakse liikumine koordinaattelgede sihilisteks, teineteisega ristuvateks ja seetõttu ka üksteisest sõltumatuteks komponentideks. Liikumisvõrrandid kirjutatakse välja iga telje sihis eraldi ja avaldatakse selliselt saadud võrrandisüsteemist otsitavad suurused. Kaldu horisondiga visatud keha liikumine-maksimaalne lennukaugus Sellest valemist saab teha järeldused: sin a(alfa)=cos(90-alfa ) siis 1) viskenurkade ja90 korral on lennukaugused võrdsed, 2) suurim lennukaugus on viskenurga 0 45 korral. Maksimaalne lennukõrgus 3.Ühtlase pöördliikumisega seotud mõisted. erinevalt kulgliikumisest pöördliikumise korral pole mõtet rääkida teepikkusest, kuna erinevad
märkimine. Masinaehituslik märkimine on enamlevinud lukksepatööoperatsioon. Katla- ja laevaehituslikul märkimisel on mõningad erinevused. Olenevalt märgitavate toorikute ja detailide kujust eristatakse kahte liiki märkimist: tasapinnalist (tasandilist) ja ruumilist. Joonte tõmbamiseks märkimisel kasutatakse märknõela, rismust ja kärni. Joonte tõmbamisel peab märknõel olema kaldu nii joonlaua serva kui ka märknõela liikumise sihis. Joont tuleb tõmmata ainult üks kord ja see peab olema võimalikult peenike. Seepärast tuleb jälgida, et märknõela ots oleks hästi teritatud. Märknõelad valmistatakse 3...5mm läbimõõduga ümarast tööriistaterasest Y10 või Y12. Märknõelad võivad olla kas ühe või kahe otsaga. Rismus - statiivile kinnitatud märknõel, on ette nähtud püstjate rõhtjoonte pealekandmiseks, samuti ka märkeplaadil kuubikutele või teistele rakistele ülesseatud toorikute kontrollimiseks.
Tallinna Tehnikaülikool Mehhatroonikainstituut Kodutöö S-13 Jäiga keha toereaktsioonide leidmine ruumilise jõusüsteemi korral Tallinn 2011 Variant 11. Horisontaalne kolmnurgakujuline plaat ABD kaaluga 240 N on kinnitatud sfäärilise liigendiga A, silindrilise liigendiga B ja jäiga kerge vardaga KE. Punkti D on rakendatud sihis DB mõjuv jõud F, mille moodul on 150 N. Leida sidemete reaktsioonid punktides A, B ja E, kui AL = LB = l , AD = DB = 2l , KL = l 2 , AE = ED. Sirge KL on vertikaalne. Nurk = 26,565° 1) . , . . , . Sxy=S* cos () AE-Sx= 90°-60°=30° Sxy Sy 90°- 30°=60° Fx =0 Xa-Sx-Fx=0 Fy =0 Ya+Yb-Sy-Fy=0 Fz =0 Za+Zb-G+Sz=0 Mx=Sz*l*cos30-240*0,5774l=0 My=2Zb+S*sin -G=0 Mz=Sy*l*sin30+Sx*l*cos30- Yb*2l+Fy*l+Fx*l*1,721= Sy*sin30+Sx*cos30- 2Yb+Fy
Võnkumiste tekitamiseks avatud võnkeringis tehti Hertzi eluajal järgmist: juhe lõigati keskelt pooleks ja jäeti kummagi poole vahele väike säde vahemik (joonis C), seejärel laeti kumbki juhi pool kõrge pingega. Ja avatud võnkeringis tekkisid võnkumised, et ära hoida võnkumiste sumbumist on vaja ergutada vibraatorit kõrgepinge allika abil seeria kiiresti muutuvate vooluimpulssidega. Maksimaalse intensiivsusega elektromagnetlained kiirguvad vibaatori teljega ristuvas sihis. Vibraatori telje sihis elektromagnetlaineid ei kiirgu. Lainete registreerimiseks kasutas Hertz teist vibraatorit, mille varraste vahel tekib säde näitas võnkumise olemasolu. Lähtevibraatori vardapaari võib vaadelda saateantennina ja laineid registreeriva vibraatori laineid vastuvõtu antennina. Antenniks nimetatakse elektrijuhtide süsteemi, mis on loodud elektromagnetlainete tekitamiseks või vastuvõtmiseks. §34. Elektromagnetlainete skaala
o Maa sees alus- ja pealiskorra kivimites ning pinnakattes olevat vett nimetatakse põhjaveeks ehk maasiseseks veeks. o Põhjavesi liigub maakoores gravitatsiooni ning rõhu vähenemise suunas. o Põhjavesi tekib sademete ja lumesulamisvee imbumisel maasse. Liiv, kruus ja lõhelised lubjakivid lasevad vett läbi ning sademevesi satub üsna sügavale maapõue. o Kui kivimikihid ei lase enam vett läbi ja on künka nõlva veeruga samas sihis kaldu, siis valgub osa pinnases olevast veest allikani. o Ligi 70% joogiveest saadakse põhjaveest. o Eestis kasutatakse peaaegu 1 milj. m 3 põhjavett ööpäevas. o Pinnavett kasutatakse joogiks vaid Tallinnas ja Narvas. o Põhjavee kaitse eeldab tema seisundi pidevat jälgimist, milleks üle kogu maa on rajatud põhjavee reziimi uurimise võrk. o Põhjaveevaru aitaks taastada karstilehtrite säilitamise toitealadel, mistõttu tuleks vältida
Interferentsiks nimetatakse kahe laine liitumist, mille tulemusena erinevais Difraktsiooniks nimetatakse nähtust, kus ruumipunktides võnkumised tugevdavad lained painduvad tõkete taha. või nõrgendavad üksteist. 3. Iseloomusta valguse interferentsi. 4. Iseloomusta polariseeritud valgust ja kus seda kasutatakse? Kui asetaksime loomuliku valguse teele seadme, mis laseb läbi ainult mingis kindlas sihis, näiteks vertikaalsihis võnkuvate E-vektoritega laineid. Sellist valgust nimetatakse polariseeritud valguseks. Rakendus: polaroidprillid, vedelkristall-kuvarid. 5. Mis on nägemisaisting? Esemetelt peegelduvad valguskiired läbivad sarvkesta, silmaava, läätse ja klaaskeha ning koonduvad võrkkestale. Valguse mõjul tekivad silma võrkkesta rakkudes keemilised muutused, mis põhjustavad närviimpulsse. Need kanduvad mööda nägemisnärvi peaaju nägemispiirkonda, kus tekib nägemisaisting
5. valguse dispersioon 1. Jõud, millega üks laeng mõjub teisele on võrdeline nedne laengute suurusega ja pöördvõrdeline nende langute vahekauguse ruuduga. Ühenimeliste laengute korral on jõud positiivne (tõukuvad) ja erinimeliste puhul negatiivne(tõmbuvad) 2. Asetades elektrijuhi elektrivälja hakkab juhis olevatele vabadele laengutele mõjuma elektriline jõud f=qE See tekitab laengute korrapärase liikumise välja sihis. Positiivse laenguga välja suunas ja negatiivsega vastassuunas. Metallides ja pooljuhtides on laengukandjateks elektronid, elektrolüütides ja ioniseeritud gaasides lisaks ioonid. Kui voolu suund juhis ajas ei muutu on tegemist alalisvooluga. Voolutugevus on võrde ajaühikus juhi ristlõiget läbinud laenguga I=dq/dt (A) 3. Dielektrikud ehk isolaatorid on ained, milles vabade laengute hulk on väga väike.
Tallinna Tehnikaülikool Mehhatroonikainstituut jeje Kodutöö S-13 Jäiga keha toereaktsioonide leidmine ruumilise jõusüsteemi korral Tallinn 2011 Variant 11. Horisontaalne kolmnurgakujuline plaat ABD kaaluga 240 N on kinnitatud sfäärilise liigendiga A, silindrilise liigendiga B ja jäiga kerge vardaga KE. Punkti D on rakendatud sihis DB mõjuv jõud F, mille moodul on 150 N. Leida sidemete reaktsioonid punktides A, B ja E, kui AL = LB = l , AD = DB = 2l , KL = l 2 , AE = ED. Sirge KL on vertikaalne. Nurk = 26,565° 1)Märgin jõud ja teljestikud joonisele. Kuna kolmnurksel plaadil on kaal, siis leian raskuskeskme. Tegemist on võrdkülgse kolmnurgaga, seetõttu on raskuskese mediaanide lõikepunktis. Sxy=S* cos () nurk AE-Sx= 90°- 60°=30° nurk Sxy ja Sy vahel on 90°-30°=60° Projektsioonid telgedele Fx =0
1. tund divide jaga measure mõõda sketch vabakäejoon scale suurenda/vähenda stretch venita mirror peegelda line joon multiline topeltjoon ray kiir construction line sirge construction line polyline jämejoon 3dpoly 3D jämejoon circle ringjoon arc kaar ellipse ellips polygon korrapärane hulknurk array - rectangular massiiv array - polar polaarmassiiv ümber keskpunkti trim kärpimine, maha lõikamine extend pikendamine hatch viirutus cp ja qsave,osmode 2. tund block teeb plokiks ja salvestab ploki joonisesse wblock teeb plokiks ja salvestab eraldi failina explode "laseb õhku" (tükkideks tagasi). Kaotab pl...
objekti teineteisest segamatult läbi minna. 19.Milline 20 saj füüsikaprintsiip tekitas klassikalise füüsika kriisi? Mis oli selle kriisi põhjus? (3.7) (126-127) Tegemist on füüsika üldprintsiibiga, mida nimetatakse absoluutkiiruse printsiibiks. Michelson ja Morley oletasid, et kui Maa tiirleb suure kiirusega ümber Päikese, siis peaksid täpsed katseriistad suutma eristada olukordi, mil Maal asuv vaatleja liigub valguslainega samas sihis või sellega risti. Samas sihis liikumisel peaks katse tulemus viitama valguse ja Maa kiiruste omavahelisele liitmisele või lahutamisele, sarnaselt maanteel liikuvate autode omavahelise kiiruse leidmisega. Michelson ja Morley ei suutnud aga avastada mitte mingeid jälgi valguse ja Maa kiiruste liitumisest. Nende katse negatiivne tulemus oli senise füüsikaga suures vastuolus. Newtoni mehaanika aluseks on teadmine, et kiirusi saab alati ülalkirjeldatud viisil liita või lahutada. Michelson ja Morley näitasid aga, et
Mida tumedam on keha, seda rohkem ta valgust neelab. Valgusenergia muutub soojuseks. Energia ei kao kuhugi vaid muundub. Selleks, et valgus silma ei kiirgaks kantakse päikeseprille, sest need neelavad valguse ja see enam ei ärrita liigselt silma. Valge pind peegeldab talle langenud valgusest 95 % ja must pind peegeldab langenud valgusest 5 %. Nägemine. Valgus on nähtav siis kui see levib silma. Valguallikaid näeme neilt kiirguva valguse tõttu. Me tajume kehi valguse silma langemise sihis. Osad loomad kes väidetavaltnäevad pimedas ei näee tegelikult täispimeduses. Vari. Ruumipiirkonda eseme taga, mida valgusallikas ei valgusta, nimetatakse täisvarjuks. Ruumipiirkonda eseme taga, mida valgusallikas valgustab osaliselt, nimetatakse poolvarjuks.
3.2. Esimese osakujundi telg-inertsmomendid Inertsmomendid telgede y ja z suhtes 3.3. Teise osakujundi telg-inertsmomendid Punkti C koordinaadid osakujundi peatelgede suhtes Inertsmomendid telgede y ja z suhtes. 3.4. Liitkujundi telg-inertsmomendid Intersimomendid kesktelgede y ja z suhtes Reegel: Telg-inertsmomendi väärtus on seda suurem mida enam on ristlõige selle telje ristsihis ''välja veninud''. Visuaalsel hinnangul on ristlõige enam ''välja veninud'' telje y sihis. Peaks olema: Tegelikult on: 4. Ristlõike tsentrifugaal-inertsmoment 4.1. Tsentrigugaal-inertsmomentide seosed 4.2. Esimese osakujundi tsentrifugaal-inertsmoment Tsentrifugaal-inertsmoment teljestiku yz suhtes Inertsmoment pööratud telje suhtes 4.3. Teise osakujundi tsentrifugaal-inertsmoment Tsentrifugaal-inertsmoment teljestiku yz suhtes 4.4. Liitkujundi tsentrifugaal-inertsmoment 5. Ristlõike kesk-peainertsimomendid 5.1. Kesk-peateljestiku asend
Veel oluline: Jäigale kehale mõjuvat raskusjõudu võib vaadelda kui keha raskuskeskmesse rakendatud jõudu. Sellest järeldub, et gravitatsiooniväljas asetseva koonduvate jõudude süsteemi korral on jõudude koondumispunkt alati raskusjõu sihil. Ühel tasapinnal paiknevate koonduvate jõudude süsteemi korral on tasakaaluks tarvilik ja piisav, et kõigi jõudude vektorsumma võrdub nulliga. Tasub meeles pidada, et nende jõudude alguspunktid on jõu sihis vabalt nihutatavad nii et tasakaalus midagi ei muutu. Sellise süsteemi tasakaaluks on vajalik, et: 3 ∑ →F i=0 i=1 Töö teostamine: Raskuse mass 400 g Ringskaala mass 15,7 g Süsteemist saadud jõudude suurused: Vasakpoolne jõud: -3,45 N Parempoolne jõud: -2,05 N Mõjusuunad:
suurem, kui vedeliku sees. Püsivas tasakaaluolekus on iga süsteemi potensiaalne energia minimaalne. Seepärast võtab vedeliku pind, kui talle ei mõju välisjõud, kuju, mille juures tema pindala on minimaalne. Järelikult sarnaneb vedeliku pind pingule tõmmatud kelmega. Nagu elastses kelmeski, esinevad vedeliku pinnakihis pinda kokkutõmbavad jõud. Neid nimetatakse pindpinevusjõududeks ja nad mõjuvad pinna puutuja sihis ning on risti vaadeldava pinnaelemendi servaga. Pindpinevusjõudusid iseloomustatakse pindpinevusteguriga , mis on arvuliselt võrdne ühikulise pikkusega pinnakontuurile mõjuva jõuga: F = , (1) L kus F on kontuurile pikkusega L mõjuv jõud. Antud töös kasutatav nn. Tilga meetod põhineb sellel, et vedeliku tilk eraldub peenikese toru otsalt siis, kui tilga raskus mg saab veidi suuremaks pindpinevusjõust F (F ~ mg)
Aksioom on tõestamist mittevajav alusväide matemaatikas. Aksioomi kehtivust tõestab see, et kõik temast tulenevad üksikväited osutuvad tõeks. 10.Kaks sündmust on põhjuslikult seotud, kui ühe sündmuse toimumine kutsub teatava vältimatusega esile teisesündmuse. 11.Töö on füüsikaline suurus, mis kirjeldab protsessi- keha või kehade süsteemi üleminekut ühest olekust teise. Töö on kehale mõjuva jõu ja keha poolt selle jõu mõjumise sihis läbitud teepikkuse korrutis. Energia on füüsikaline suurus, mis kirjeldab keha või kehade süsteemi ühte kindlat olekut. Energia on jõu võime teha tööd. 12.Kineetiline energia on tingitud keha liikumisolekust. Potentsialne energia on tingitud keha mõjust teiste kehadega ehk keha paiknemist teiste kehade väljas.
suurem, kui vedeliku sees. Püsivas tasakaaluolekus on iga süsteemi potensiaalne energia minimaalne. Seepärast võtab vedeliku pind, kui talle ei mõju välisjõud, kuju, mille juures tema pindala on minimaalne. Järelikult sarnaneb vedeliku pind pingule tõmmatud kelmega. Nagu elastses kelmeski, esinevad vedeliku pinnakihis pinda kokkutõmbavad jõud. Neid nimetatakse pindpinevusjõududeks ja nad mõjuvad pinna puutuja sihis ning on risti vaadeldava pinnaelemendi servaga. Pindpinevusjõudusid iseloomustatakse pindpinevusteguriga , mis on arvuliselt võrdne ühikulise pikkusega pinnakontuurile mõjuva jõuga: F , (1) L kus F on kontuurile pikkusega L mõjuv jõud. Antud töös kasutatav nn. Tilga meetod põhineb sellel, et vedeliku tilk eraldub peenikese toru otsalt siis, kui tilga raskus mg saab veidi suuremaks
selle joone puutujat, positiivse punktlaengu e-vektor on suunatud laengust eemale, elektrivälja superpositsiooni printsiip-selle kohaselt võrdub laengute süsteemi väljatugevus üksikutest laengutest põhjustatud väljatugevuste vektoriaalse summaga, homogeenne on selline elektriväli mille väljatugevus on igas punktis suuruselt ja summalt sama. Jõujooned on paralleelsed ja sirged, Töö elektriväljas ei sõltu trajektoori kujust vaid jõujoone sihis sooritatud nihkest A=F*s*cosa. AeEp=m*g*h)=A=E*q*d. A-töö(J) E-elektriväljatugevus (V/m) q-laeng(c) d-kaugus neg.plaadist. Ep=Eqd Ep-potensiaalne energia(J),potentsiaalne väli on väli, milles töö ei sõltu liikumistee kujust, kuna tema kirjeldamisel võib kasut. Potensiaalse en. mõistet.punktlaengu potensiaalse en. arvutamine homogeenses väljas- wp=q*E*d,d-laengu kaugus en. nulltasemest. Potentsiaal näitab, kui suur on selles punktis
10. lained - Maavärisemine on maapinna äkiline tõuge või vibratsioon, mille tagajärjel tekivad seismilised lained 11. lainepikkus - Lainepikkuseks nimetatakse füüsikas kaugust kahe teineteisele lähima, samas faasis võnkuva punkti vahel. 12. ristlaine - Ristlaine ehk ristilaine on laine, kus keskkonna osakesed võnguvad risti lainete levimise suunaga. 13. pikilaine - Pikilaine on laine, milles võnkumine toimub laine levimise sihis 14. resonants - esonants on võnkeamplituudi järsk kasv perioodilise välismõju sageduse kokkulangemisel süsteemi omavõnkesagedusega. 15. interferents - Nähtust, mis tekib kahe (või mitme) ühesuguse lainepikkusega laine liitumisel ja mis väljendub liitlaine amplituudi kasvus või kahanemises sõltuvalt liituvate lainete faasinihkest 16. difraktsioon - Difraktsiooniks (ladina sõnast diffractus 'murdunud')
polaarsuselt vastupidine pöörisvoolu tekitanud magnetväljale. 2.Milles seisneb pöörisvoolude kahjulik toime ja kuidas seda vähendada? Pöörisvoolud on elektrimasinates ja aparaatides tavaliselt ebasoovitavad, kuna pöörisvoolukadu kuumutab täiendavalt masinat ning halvendab kasutegurit. Lisaks toimivad pöörisvoolud lahtimagneetivalt. Pöörisvoolukao vähendamiseks valmistatakse südamikud õhukestest (0,1...0,5 mm) üksteisest isoleeritud terasplekkidest, mis on magnetvoo sihis, see tähendab pöörisvooludega risti. 3.Mis on eneseinduktsioon? Eneseinduktsiooniks nimetatakse induktsiooni elektromotoorjõu tekkimist vooluringis voolutugevuse muutumise tõttu selles vooluringis endas. Vastavalt Lenzi reeglile takistab eneseinduktsiooni elektromotoorjõud voolutugevuse kasvamist vooluringi sulgemisel ja kahanemist selle katkestamisel. 4.Koosta mõistekaart ,,ENESEINDUKTSIOON". 5.Miks kasutatakse eneseinduktsiooni emj
Lorentzi jõud tööd ei tee, aga võib mõjutada laengute liikumise suunda. Jõu suunda saan määrata vasaku käe reegli järgi. Näpud – positiivselt laetud osakeste liikumisesuund; peopesa – tulevad magnetvälja jõujooned; pöial – näitab osakesele mõjuva Lorentzi jõu suunda. Millal tekib juhtme otstele pinge? Kui juhtmelõik liigub magnetvälja. Millistel tingimustel tekib juhtme otstele pinge? Pinge tekib liikumisel, mis ei toimu magnetvälja sihis. Kuidas mõista magnetvoo muutust? Magnetvoog näitab millisel määral läbivad magnetvälja jõujooned vaadeldavad pinda, selle pinna suuruse ja asendi tõttu magnetväljas. Magnetvoog = B S cos(beeta) Ühik 1 Wb Kondensaator (mahtuvus) - on kehade süsteem, mis on loodud mingi kindla mahtuvuse saamiseks. Elektrimahtuvus on düüsikaline suurus, mis iseloomustab kehade süsteemide võimet salvestada endassse laengut ja seeläbi tekitada elektrivälja. Mahtuvuse ühik on 1F (farad)
varda teljega risti mõju põikkoormus 4.3. Nimetage neli lõikele töötavat liidet! Tihvtliide, neetliide, keevisliide, sarniirliigend 4.4. Kirjeldage põik-koormatud lühikese varda deformatsioone! lõiketsoonis tekivad nihkedeformatsioonid; kontaktpinnal tekivad survedeformatsioonid; 4.5. Defineerige põikjõud! = osakestevaheliste (sise-) nihkejõudude resultant lõikel *takistab materjalikihtide nihkumist üksteise suhtes; *mõjub ristlõikepinna sihis; *rakendub ristlõike keskmes 4.6. Missugune tööseisund on lõige? = varda tööseisund, kus ristlõikes arvestatakse vaid põikjõudu Q: *lõiketsooni ristlõiked nihkuvad üksteise suhtes varda telje ristsihis; *lõiketsoonist väljas jääb varda telg sirgeks; *lõiketsooni ristlõiked jäävad tasapinnalisteks. 4.7. Kus paikneb liites lõikele töötava varda lõikepinna ohtlik punkt (punktid)? Kahe lõikele töötava pinna vahel 4.8. Milles seisneb muljumine (lõikele töötavas liites)
Faasinihke meetod hääle lainepikkuse määramiseks. Heligeneraatori G väljundklemmidelt saadav helisageduslik siinussignaal muundatakse valjuhääldi VH abil helivõnkumisteks. Kaugusel l VH-st asub mikrofon M , mis muudab heli võnkumised uuesti elektrilisteks võnkumisteks. Need elektrilised võnkumised antakse edasi ostsilloskoobi Y sisendile. Ostsilloskoobi x sisend on ühendatud heligeneraatori väljundiga. Y- teljele antav pinge sunnib elektronkiirt võnkuma vertikaal sihis. X- teljele rakendatud pinge horisontaalsihis. Seega liigub kiir ekraanil mööda trajektoori, mis vastab sama sagedusega ristsihiliste võnkumiste liitumisele. Kuna kiirt juhivad korraga mõlemale teljele rakendatud siinuseliselt muutuv pinge, siis saadakse vastavalt võnkumiste teooriale kiire trajektoori võrrandiks ellipsi võrrand. Kui aga kahe risti oleva siinuse kujulise signaali liitmine toimub punktis, kus siinus läbib