Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Koridori- ja trepikoja automaatne valgustuse juhtimine". Need materjalid aitavad sul teemat sügavamalt mõista.
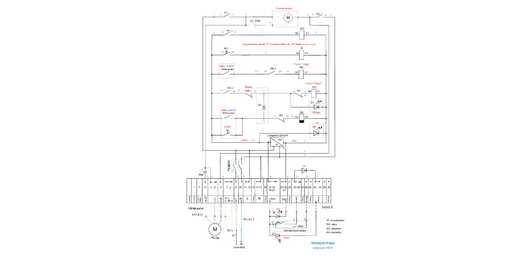
koridori, valgustus, trepikoja, aegrelee, 220v" M PE Kontaktmanomeeter AG- aegrelee KO- kontaktor D1 B6
" M PE Kontaktmanomeeter AG- aegrelee KO- kontaktor D1 B6
Majas on 315 elanikku, kuigi seda täpselt ei sa öelda, kuna paljud korterid välja üürinud üürnikud vahetuvad tihti. 4 2. KORTERIÜHISTU JUHTIMINE. Esialgne KÜ Papiniidu 35 põhikiri on registreeritud 10.08.1998. aastal. KÜ tegevust on juhtinud Üldkoosoleku poolt valitud juhatus (8 liikmeline) ning revisjonikomisjon (2 liikmeline). 8-liikmelise juhatuse valikuprintsiibiks on olnud korteriomanike kokkulepe, et iga trepikoda valib omale trepikoja vanema ning tema esindab seda trepikoda juhatuses. Selline süsteem on otstarbekas, aga mitte kõigis trepikojas leidub selliseid inimesi, kes soovivad olla juhatuses. Praegu meie juhatus on 6 liikmeline. Muutmiskanne on kinnitatud 10.02.2006.a. 21 detsember 2005. aastal üldkoosolekul on võetud vastu muudatustega ja täiendustega põhikiri. KÜ kõrgemaiks juhtorganiks on üldkoosolek, kus omanikud saavad aktiivselt võtta osa oma maja elu reguleerivatest toimingutest
SISUKORD 1. Laboritööde tegemise kord ja ohutustehnika................................................5 2. Laboritöö nr. 1...................................................................................6 Elektritakistuse mõõtmine............................................................................................6 3. Laboritöö nr. 2................................................................................. 7 Ohmi seaduse katseline kontrollimine (ahela osa kohta...............................................7 3. Laboritöö nr. 3...................................................................................8 Vooluallika emj. (allikapinge) ja sisetakistuse määramine..........................................8 5. Laboritöö nr. 4...................................................................................9 Kirchoffi II seaduse katseline kontrollimine.....................................
Negatiivne klemm Kolmnurklülitus Alalis- ja vahelduvvool Lahtine kolmnurklülitus Vahelduvvool Siksaklülitus Helisagedus- Kõrgsagedus- vahelduvvool vahelduvvool Kahe poolusejuhiga ja 2/M keskjuhiga alalisvoolu- Neutraal 110 / 220V süsteem 2 x 110 V ~ 50Hz 220V Vahelduvvool sagedu- Keskjuht sega 50 Hz 220 V 3 ~ 50Hz Kolmefaasiline vool 3 / N ~ 50Hz /Kolmefaasiline TN-S 220V sagedusega 50 Hz TN-S vahelduvvoolu juhistik Kolmefaasiline neut- 3 / N~ 50Hz raaljuhiga neljajuht- 3NPE~ 50Hz Kolmefaasiline viie- 220/380V meline liin 50 Hz 220/380V juhtmeline liin 4. JUHTMED, KAABLID JA LIINID
kontaktor Mootor Joonis 4.4. Kolmefaasilise mootori jõuahelate kujutamine ühe- ja kolmejoone skeemil. Toiteliin Sulavkaitsmed või kaitselüliti Kontaktorid Mootorikaitselüliti Termorelee Mootor Aegrelee Joonis 4.5. Mootori staatorimähiste automaatne täht-kolmnurk ümberlülitus, mootorikaitselüliti ja aegrelee. 114 Mootori juhtimine programmeeritava kontrolleriga Tänapäeval kasutatakse relee-kontaktorjuhtimise asemel sageli programeeritava kontrolleriga juhtimist. Sel juhul realiseeritakse kogu juhtimisloogika kontrolleri programmiga, kusjuures programmeerimiseks saab kasutada erinevaid mooduseid. Joonisel 4
1. Kompleksarv kui reaalarvude paar. Tehted kompleksarvudega. Tehete omadused. Kompleksarvu algebraline kuju. Tuletatavad tehted ja nende omadused. Kompleksarvuks nimetatakse reaalarvude paari (x,y). C = {(x;y) | x, y R} Tehted kompleksarvudega: z1 = (x1; y1) C; z2 = (x2; y2) C 1. liitmine: z1 + z2 = (x1 + x2; y1 + y2) 2. korrutamine: z1 * z2 = (x1x2 - y1y2; x1y2 + x2y1) Kompleksarvudega tehete omadused 1. liitmine on kommutatiivne, st z1 + z2 = z2 + z1 z1, z2 C korral 2. liitmine on assotsiatiivne, st (z1 + z2) + z3 = z1 + (z2 + z3) z1, z2, z3 C korral 3. liitmise suhtes leidub nullelement (reaalarv 0, 0 + z = z + 0 = z z C korral), st leidub C, nii et z + = + z = z z korral; = (0; 0) = 0 4. igal kompleksarvul z = (x; y) = x + yi leidub (liitmise suhtes) vastandarv, st selline arv w C, et z + w = w + z = 0; w = -z 5. korrutamine on kommutatiivne, st z1z2 = z2z1 z1, z2 C korral 6. korrutamine on assotsiatiivne, st (z1z2)z3 = z1(z2z3) z1, z2, z3 C korral
1. 1. N n . , m k . N = 20, n = 5, m = 4, k = 2. . . C nk C Nm--nk C 52 C152 5!15!4!16! 5 4 3 15 14 4 P ( A) = = = = = 0,217 . CN m C 204 2!3!2!13!20! 2 20 19 18 17 2. n , k . , m . n = 10, k = 4, m = 2. . . C km C 42 4!2!8! 43 2 P ( A) = m = 2 = = = = 0,133 . Cn C10 2!2!10! 10 9 15 3. . 15% , 25%, 30%. , ( ) . . : A1 ; A2 ; A3 . , ( ) P ( A) = P ( A1 A2 A3 + A1 A2 A3 + A1 A2 A3 ) = = P( A1 A2 A3 ) + P( A1 A2 A3 ) + P ( A1 A2 A3 ) = = P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) = = 0,85 0,75 0,3 +
TALLINNA POLÜTEHNIKUM Päevane osakond ELEKTRIMOOTORI KIIRUSE AUTOMAATREGULEERIMISE SÜSTEEM Kursusetöö Õppeaine automaatreguleerimine Juhendaja: V. Purro Konsultant: V. Purro Tallinn 2010 2 Sisukord KURSUSETÖÖ ÜLESANNE..............................................................................................3 KURSUSETÖÖ ANDMED................................................................................................. 4 Sissejuhatus.......................................................................................................................... 6 2. SÜSTEEMI FUNKTSIONAALSKEEMI JA STRUKTUURSKEEMI KOO
Kordamisküsimused 1) Kompleksarvu mõiste. Kompleksarvu algebraline kuju ja tehted algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b-imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k- arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= z 1 ( a1 +b 1 i ) (a 2+b 2 i) (a1+b1i)*(a2+b2), = z 2 ( a2 +b 2 i ) (a 2+b 2 i) 2) Kompleksarvu trigonomeetriline kuju ja tehted trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y- telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy
4) - . . . . -.: 2, N . 4) . (x,y)S - .1: D . . - Rn . . . - . . . r ×r f(x,y)g(x,y), - . . . . . . . - yR 1)D - N= 1 2 . f ( x, y )dxdy g ( x, y r1 × r2 . . . - D=D(f) n2) y . . - 3) -
DETERMINANDI MÕISTE. KAHEREALISE DETERMINANDI Avaldanud esimesest võrrandist x-i ja asendanud saadud tulemuse teise võr- KASUTAMINE VÕRRANDISÜSTEEMIDE LAHENDAMISEL randisse, saame c1 b1 y Paljude sisult erinevate probleemide lahendamine viib ühe ja sama seaduse a1 x b1 y c1 x , kui a1 0. järgi koostatud avaldisteni. Sel juhul on otstarbekas uurida nende avaldiste a1 üldisi omadusi. c b y° a2 ¡¡ 1 1 ±± b2 y c2 a1 korrutame võrrandi pooli a1-ga Üheks selliseks av
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
Klassikaline või geomeetriline tõenäosus μ(ΩA)=(2,25-2*0,5)=1,25 k V =k! Ck P(A)=1,25/2,25=5/9 Variatsioonid: n n Liitmislause, korrutamislause, tinglik 1) Karbis on 10 pooljuhti, neist 7 hiljuti testitut. Karbist tõenäosus, sõltumatud sündmused, võetakse huupi 5 pooljuhti. Leidke tõenäosus, et sõltumatute katsete seeria nende hulgas on täpselt 3 hiljuti testitut. Liitmislause: P(A1+A2)=P(A1)+P(A2)-P(A1A2) Lahendus: A=“3 pooljuhti 5-st on testitud“ P((A1+A2)+A3)= P(A1)+P(A2)+P(A3)-P(A1A2)- 5 P(A1A3)-P(A2A3)+P(A1A2A3) │Ω│=n= C10 =12 Tinglik tõenäosus: DEF. P(A/B)=P(AB)/P(B) ; 3 2
1.1.elektriväli; elektrilaengud; coloumbi seadus Elektriväli- on elektrilaengu poolt tekitatud ruumis leviv pidev väli ja mis mõjutab ruumis paiknevaid teisi elektrilaenguid. (tekib liikumatu elektrilaengu ümber) Elektrilaengud- positiivne laeng ja negatiivne laeng. Samanimelised laetud kehad tõukuvad, erinimelised kehad tõmbuvad. Coulombi seadus- kahe punktlaengu vaheline jõud mistahes isoleerivas keskkonnas on võrdeline laengute korrutisega ja pöördvõrdeline keskkonna absoluutse dielektrilise läbitavusega ning laengutevahelise kauguse ruuduga. F=Q1 *Q2 /r² *K 2.Magnetvoog On füüsikaline suurus, mis näitab magnetvälja suutlikkust läbida vaadeldavat pinda. Tähis on Fii Magnetvooks läbi väljaga ristioleva pinna nim. Vootiheduse B ja pindala S korrutist. =B*S Kui väli on pinna suhtes kaldu, siis leitakse vootiheduse vektori B normaalkomponent =B*S järgi magnetvoog =B*S=BS*cos 3.Generaatormähiste ja tarvitite kolmnurkühendus Esimese faasimähise lõpp x ü
ANALÜÜTILINE GEOMEETRIA RUUMIS, VEKTORID VEKTORI MÕISTE, MOODUL JA SUUND Neid suurusi, mida on võimalik iseloomustada ühe arvuga, nimetatakse skalaarseteks (temperatuur, mass, töö). Suurusi, mille iseloomustamiseks on vaja arvu ja suunda, nimetatakse vektoriaalseteks (jõud, kiirus, kiirendus). Definitsioon. (Geomeetriliseks) vektoriks nimetatakse suunatud sirglõiku, lõiku, millel tehakse vahet alguse ja lõpu vahel. Kui vektori algus on punktis A ja lõpp punktis B, siis tähistatakse AB , a . Vektor on kindla sihi, suuna ja pikkusega lõik. Siht on teda kandva sirge siht. Suund on alguspunktist lõpp-punkti poole. Definitsioon. Vektori mooduliks nimetatakse tema pikkust, see on lõigu AB pikkust ja tähistatakse AB AB , a a . Vektori moodul on skalaarne mittenegatiivne suurus. Definitsioon. Nullvektoriks nimetatakse vektorit, mille algus- ja lõpp-punkt langevad kok
1. Kompleks arvude põhimõiste,põhilised definatsioonid. K.arvude liitmine,korrutamine,jagamine algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b- imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k-arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= (a1+b1i)*(a2+b2), 2. K.geomeetriline kujutamine, trigonomeetriline kuju.korrutamine ja jagamine trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y-telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy trigonomeetriline kuju tähistame nurk X-teljel ja vektori pikkus r ,siis a=rcos ja b=rcos.avaldist z=r(cos+isin) ongi trigonomeetriline kuju. Arvutamine z1*z2=
I. Determinandid 1 Determinandi m~ oiste 1.1 Idee selgitus Algul defineerime esimest j¨ arku determinandi, siis esimest j¨arku determinandi abil teist j¨ arku determinandi, seej¨arel teist j¨arku determinandi abil kolmandat j¨ arku detereminandi jne, n-j¨arku determinandi defineerime (n - 1)-j¨arku determinandi kaudu. Sel- list defineerimisviisi nimetatakse induktiivseks ja vastavat objekti induktiivseks konstruktsiooniks. Eelnevalt on soovitatav tutvuda maatriksi m~oistega (II.1.1). Kooloniga v~ordus A := B t¨ahendab j¨argnevas, et A on defineeri- tud B kaudu. Seda v~ordust kasutame ka samav¨ a¨arsete t¨ ahistuste sissetoomiseks. 1.2 Esimest j¨ arku determinant Arvu a R determinandi |a| ehk esimest j¨ arku determinandi de- fineerime valemiga |a| := det a := a. 1.3 N¨ aide | - 5| = -5
KOMBINATOORIKA 2 Kombinatoorika tegeleb üldiste meetodite ja valemite loomisega niisuguste ülesannete lahendamiseks, kus tuleb leida erinevate võimaluste arv mingis mõttes eristatavate hulkade moodustamiseks. Näiteks kui meil on vaja numbritest 1, 2, 3, 4, 5, 6, 7, 8, 9, 0 moodustada neljakohalisi naturaalarve, siis saame neid arve eristada selles esinevate kohtade arvu järgi, aga lisaks sellele veel selle järgi, kas selles neljakohalises arvus on korduvaid numbreid, kas selles võib esikohal olla number 0, kas numbrite erinev järjestus annab erineva arvu jne. Seega on ennekõike vaja ülesande teksti põhjal määrata ühendite arvu määramise eeskirjad. Ühendeiks nimetatakse mingeist esemeist ehk elementidest moodustatud rühmi, mis erinevad üksteisest kas elementide endi, nende järjestuse või arvu poolest. Niisugust üldist definitsiooni saab väga mitmel viisil täpsustada. Järgnevalt vaatleme kuut kõige olulisemat võimalust selleks ja esitame vastavate ühendite ar
Vahelae kandekonstruktsioonid on õõnespaneelidest ja katusekandekonstruktsioonid on puidust. Katusekatteks on Rannila PP-45A profiilplekk. Hoone tulepüsivusklass on TP-3 1.2.2. Mahulis-plaaniline lahendus ja tehnilis-majanduslikud näitajad. Hoone on eluhoone. Esimesel korrusel asuvad kabinet, magamistuba, köök, WC, vannituba, sahver ja hall, millest saab keerdtrepi kaudu teisele korrusele. Teisel korrusel asuvad kaks tuba ja panipaik, kuhu saab koridori kaudu. - Hoone parameetrid: Pikkus: 12,58 m Laius: 9,58 m Korruse kõrgus: 2,83 m Hoone üldkõrgus: 8,2 m Sokli kõrgus: 51 cm - Tehnilis-majanduslikud näitajad: Tubade arv: 5 Hoone korruselisus: 2 Brutopind: 165,3 m2 Netopind: 158,1 m2 Kasulik pind: 146,1 m2 Hoone ruumala: 593 m3 Sh. Hoone maaalune kubatuur 0 m3 Sh. Hoone maapealne kubatuur 593 m3 Hoone alune pind: 120,5 m2 Krundi pind: 1810 m2 Täisehituse protsent: 6,66 %
Ökonomeetria MS.0151 Laboratoorne töö nr. 10 Analüüsida järgmist astmefunktsiooni (Cobb-Douglas'e tootmisfunktsioon) , kusjuures a0 = 1 a1 + a 2 = 1 a1 = 0,888 (de on õpinguraamatu numbrikohad) a2 = 1 - a1 0,112 x1 - kapital x2 - tööjõud Selleks: a) arvutada funktsiooni väärtused kui x1 muutub vahemikus 10 kuni 20 (samm 0,5) ja x2 muutub vahemikus 2 kuni 20 (samm 1); a0= 1 a1 = 0,89 Tabeli päis x1/x2 2 3 4 5 6 10 8,3505553598 8,738514 9,02466 9,25 9,4439339291 10,5 8,7203006242 9,125437 9,42425 9,66 9,862091728 11 9,0880783797 9,510301 9,82172 10
Tallinna Tööstushariduskeskus Hüdraulika teoreetilised alused 2 Hüdraulika teoreetilised alused Raskusjõud = mass × raskuskiirendus 2.1 Füüsikalised suurused F = 1 kg × 9,81 m/s2 =9,81 N Jõu mõõtühikuks SI-süsteemis on Mass m njuuton. Inertsi ja gravitatsiooni iseloomustaja Rõhk p ning mõõt. Keha mass on SI-süsteemi põhiühik. Massi mõõtühikuks SI- Suurus, mis iseloomustab keha pinna süsteemis on kilogramm. mingile osale risti mõjuvaid jõude. Rõhk on vedelikke sisaldavate protsesside Jõud F kirjeldamisel üks tähtsaim parameeter. Pinnaga A risti mõjuv jõud F tekitab Kehade vastastikuse mehaanilise mõju rõhu p:
KESKKOOLI MATEMAATIKA RAUDVARA 1. osa Andres Haavasalu dikteeritud konspekti järgi koostanud Viljar Veidenberg. 2003. aasta 1 Sisukord Sisukord........................................................................................................................................2 Arvuhulgad............................................................................................................................... 5 Naturaalarvude hulk N..........................................................................................................5 Negatiivsete täisarvude hulk z ...........................................................................................5 Täisarvude hulk Z.................................................................................................................5 Murdarvu
TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut Kodutöö aines Sissejuhatus Robotitehnikasse Tööstusroboti Mitsubishi RV-3SQ kinemaatika ja juhtimine Õpilane: Strippar Marko 999999 Juhendaja: Tõnu Lehtla Tallinn 2011 Sisukord 1.Roboti valik ..........................................................................................................................................3 2.Roboti kirjeldus ...................................................................................................................................3 2.1Manipulaatori ehitus ..........................................................................................
Aritmeetiline jada ------------------------------------------------------- Aritmeetilise jada üldliikme valem a n = a1 + n - 1 d ( ) Aritmeetilise jada esimese n-liikme summa valem a + an 2a + ( n - 1) d Sn = 1 n Sn = 1 n 2 2 ------------------------------------------------------- 1. Leia aritmeetilise jada 2; 9; 16; ... kaheteistkümnes liige. Lahendus: Antud on a1 = 2; a2 = 9, millest järeldub, et vahe on d = 9 2 = 7; n = 12. Leiame a12 ( ) Kasutades aritmeetilise jada üldliikme valemit a n = a1 + n - 1 d , saame a12 = 2 + (12 - 1) 7 = 2 + 11 7 = 79 2. Arvuta aritmeetilise jada n-is liige. a) a1 = 2; d = -2; n = 12; a12 = ??? ( ) L
TALLINNA TEHNIKAÜLIKOOL Keemiatehnika instituut Laboratoorne töö õppeaines Keemiatehnika II KUIVATAMINE Õppejõud: N. Savest Grupp: Tallinn 2010 1. TÖÖ ÜLESANNE 1.1. Tutvuda kuivatusseadme konstruktsiooniga. 1.2. Leida kuivatamisprotsessi läbiviimise etteantud tingimustel kuivatamise kiiruse sõltuvus materjali niiskussisaldusest. 1.3. Leida kriitiline, lõpp- ja tasakaaluline niiskussisaldus. 1.4. Arvutada õhu erinevate kiiruste ja temperatuuride korral kuivamistegur N. 1.5. Arvutada kuivatamise teise perioodi kestvus II ja võrrelda seda katseliselt leitud väärtustega. 2. KATSESEADME 5 15 7 12
ARVUTI ARHITEKTUURI TESTID 1.test Kombinatsioonloogikaahelad(1) 1)Milline joonisel kujutatud loogikaelementidest töötab vastavalt selles kandendväärtuste tabelist kirjeldatule? V: B 2) Milline joonisel kujutatud loogikaelementidest töötab vastavalt selles kahendväärtuste tabelis kirjeldatule? V: F 3) Mida tähendab lühend CMOS? V: complementary metal oxide semiconductor 4) Kas alljärgnev lause on tõene või väär: NMOS (NMOP) transistori väratile positiivse pinge (UG=Uallikas) rakendamisl käitub see transistor avatud lülitina. V: VALE 5) Kas alljärgnev lause on tõene või väär: NMOS (NMOP) transistori väratile nullise pinge (UG= 0V rakendamisl käitub see transistor suletud lülitina. V: VALE 6) Milliste joonisel kujutatud loogikaahelate kosted on identsed? Ehk teisisõnu: milliste ahelate puhul saate sisendparameetrite samade kombinatsioonide korral väljundis ühesuguse väärtuse. V: A ja E 7) Milliste joonisel kujutatud loogikaahelate kosted on identse
ON MÕELDUD KASUTAMISEKS TÖÖ- JA KESKKONNAOHUTUST PUUDUTAVATES ÕPPEAINETES. KASUTATUD ON AVALIKKE LITSENSEERIMATA MATERJALE. TULI Tuli on kõrgel temperatuuril põlemisel leekide moodustumisel ilmnev nähtus, mille käigus eraldub valgust ja soojust. Tule tekkimise eelduseks on kütuse ja oksüdeerija olemasolu (näiteks õhuhapniku) ning süttimistemperatuuri ületamine Tulekahju (ka põleng) on kontrolli alt väljunud põlemine, mis kahjustab inimesi, nende vara või keskkonda. Tulekahju võib olla tekkinud juhuslikult või on keegi selle tahtlikult süüdanud. Tavalisemad tulekahju tekkimise põhjused on ettevaatamatu tulega ümberkäimine, potentsiaalselt tuleohtlike seadmete, ainete ja materjalide oskamatu käsitsemine, staatiline elekter, äike, tahtlik süütamine, isesüttimine jm. Tulekahjude kustutamisega tegeleb tuletõrje. Tulekahju on väljaspool spetsiaalset kollet toimuv kontrollimatu põlemine, mis kahjustab inimesi, nende vara või keskkonda. Tulekahju jaoks o
ELEKTROONIKA 2003 KORDAMISKÜSIMUSED 1. ÜLDOSA....................................................................................................................1 1.1.Elektroonika ajaloo põhietapid.............................................................................1 1.2.Mis on elektronlamp.............................................................................................2 1.3.Elektronkiiretoru.................................................................................................. 2 1.4.Mis on võimendi...................................................................................................2 1.5.Analoog ja digitaalelektroonika erinevus..........................................................3 1.6.Elektroonika passiivkomponendid....................................................................... 3 1.7.Dioodi ehitus ja funktsioneerimine.
Haridus- ja Teadusministeerium Reduktori projekt Juhendaja: Sisukord: Elektrimootori valik.........................................................................................................................4 Ülekande põhiparameeterarvutus.................................................................................................... 4 Arvutan pöördemomendi erinevatel võllidel:..............................................................................5 Hammasrataste materjali valik ja lubatud pingete arvutus..............................................................5 Leian tegurid................................................................................................................................5 Arvutan lubatud kontaktpinged................................................................................................... 6 Hammaste ülekandearvutus......................................................
Võrumaa Kutsehariduskeskus MH-08 Pneumaatika projekt Kodutöö Kristen Lalin MH-08 Juhendaja: Viktor Dremljuga Väimela 2009 Sisukord Sisukord.............................................................................................................................. 2 Sissejuhatus.................................................................................................................................3 Lahenduskäik.............................................................................................................................. 4 Andmed...................................................................................................................................4 Seadme kirjeldus.....................................................
MATEMAATIKA TÄIENDÕPE VALEMID JA MÕISTED KOOSTANUD LEA PALLAS 1 2 SAATEKS Käesolev trükis sisaldab koolimatemaatika valemeid, lauseid, reegleid ja muid seoseid, mille tundmine on vajalik kõrgema matemaatika ülesannete lahendamisel. Kogumikus on ka mõned kõrgema matemaatika õppimisel vajalikud mõisted, mida koolimatemaatika kursuses ei käsitletud.. 3 KREEKA TÄHESTIK - alfa - nüü - beeta - ksii - gamma - omikron - delta - pii - epsilon - roo - dzeeta - sigma - eeta - tau - teeta - üpsilon - ioota - fii - kapa - hii - lambda - psii - müü - oomega