TALLINNA TEHNIKAÜLIKOOL Elektriajamite ja jõuelektroonika instituut
Kodutöö aines Sissejuhatus Robotitehnikasse
Tööstusroboti
Mitsubishi RV-3SQ
kinemaatika ja juhtimine
Õpilane: Strippar Marko 999999
Juhendaja : Tõnu Lehtla
Tallinn 2011 Sisukord
1.Roboti valik ..........................................................................................................................................3
2.Roboti kirjeldus ...................................................................................................................................3 2.1Manipulaatori ehitus ....................................................................................................................3 2.2 Tehnilised andmed .....................................................................................................................3 2.3 Roboti juhtimine .........................................................................................................................3
3.Roboti kinemaatika otsene ülesanne ..................................................................................................8
4.Roboti kinemaatika pöördülesanne .................................................................................................10
5.Roboti sirgjoonelise liikumise
planeerimine ...................................................................................12 5.1 Ülesande sisu ............................................................................................................................12 5.2 Ülesande lahendus ....................................................................................................................13 5..3
Diagrammid .............................................................................................................................16
6.
Kahetasandiline juhtimine................................................................................................................17
7.Esimese mootori vajaliku võimsuse hindamine ..............................................................................18
8.Kokkuvõte ..........................................................................................................................................20
2 1. Roboti valik Selleks tööks valisin tööstusroboti Mitsubishi RV-3SQ. Valiku tegemisel ei lähtunud
mingitest kindlatest eelistustest vaid valisin üsna lihtsa 6-teljelise ning tuntud tootja roboti.
2. Roboti kirjeldus RV-3SQ on kompaktne kuueteljeline
robot kasutuseks mehaanilisetes ja
koosteprotsessides. Ta on spetsiaalselt
disainitud kliendile, kes soovib luua kompaktset ja
hästi paindlikku tootmisliini näiteks elektroonikakomponentide
koostamiseks arvutile või
autole . See robotite perekond on ka üks esimesi maailmas, mis pakub kontrollerit (iQ
platvorm ) mille abil on lihtne integreeruda ükskõik millise tootja poolt valmistatud
automaatikasüsteemidega. Robotil on kõrge produktiivsus, suur täpsus (±0,02mm) ja ohutuse
abinõudena kasutatakse ,,surnud mehe lülitit".
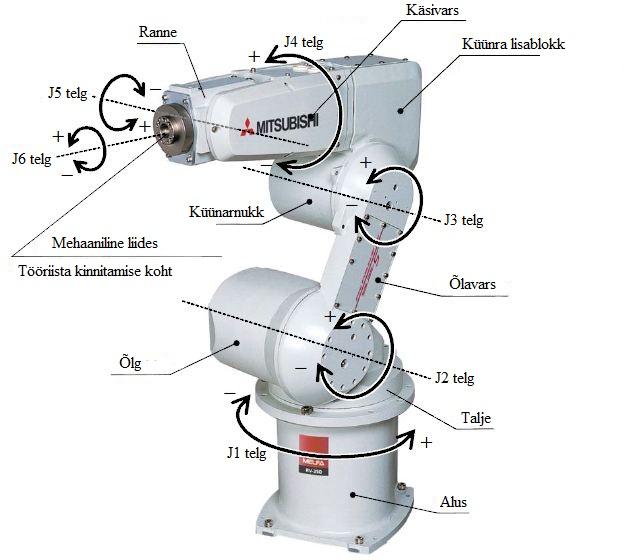
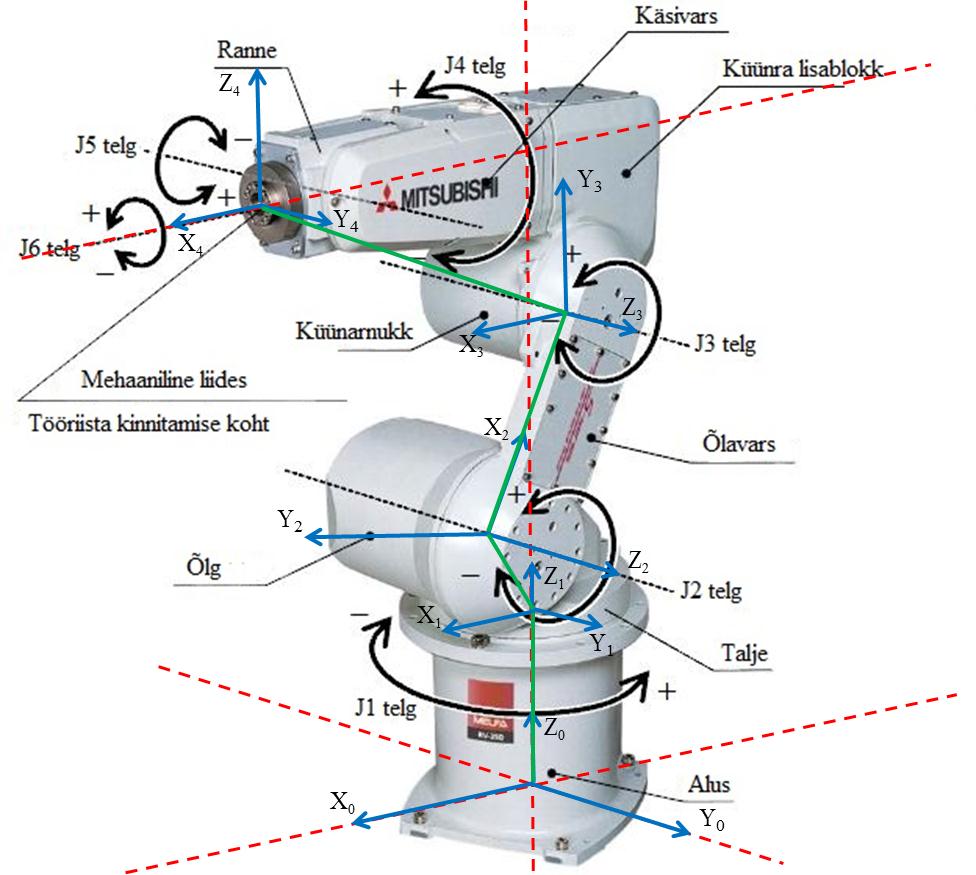
2.1 Manipulaatori ehitus
Manipulaatori ehitus ja kinemaatika on toodud välja joonistel 2.1, 2.5 ja 2.6.
2.2 Tehnilised andmed
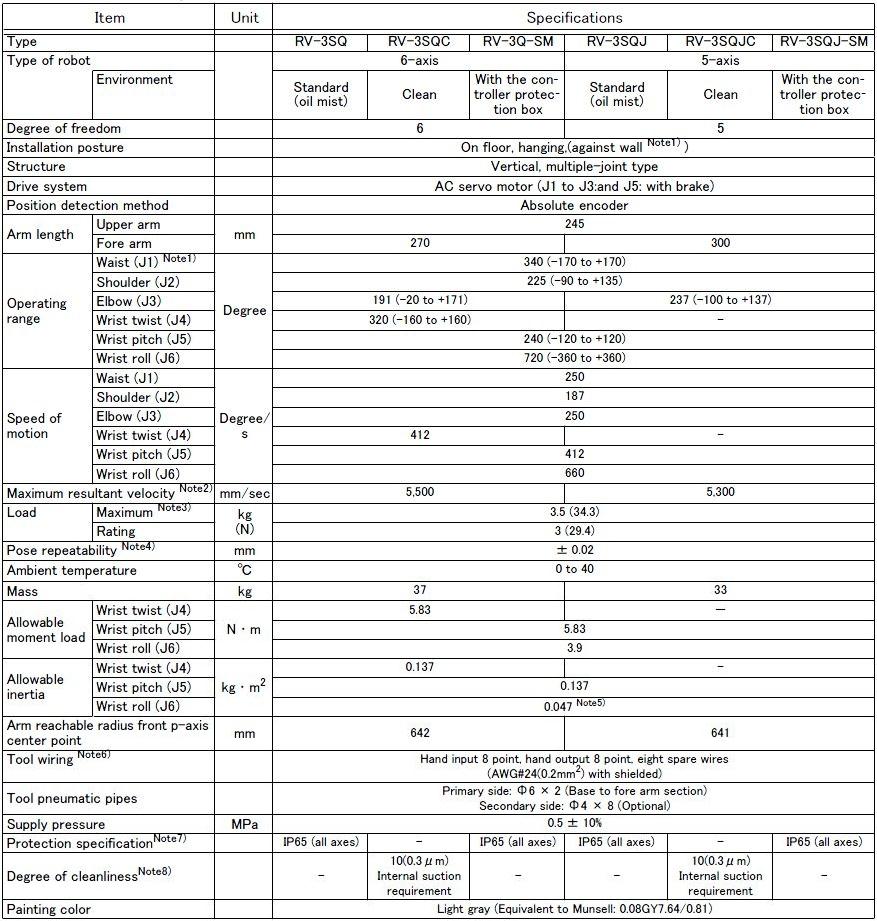
Roboti tehnilised andmed on välja toodud tabelis 1. Tabel on inglise keeles. Kõnealuse
roboti andmed on näha vasakpoolsemas tabeli osas kuueteljeliste
sektsiooni all.
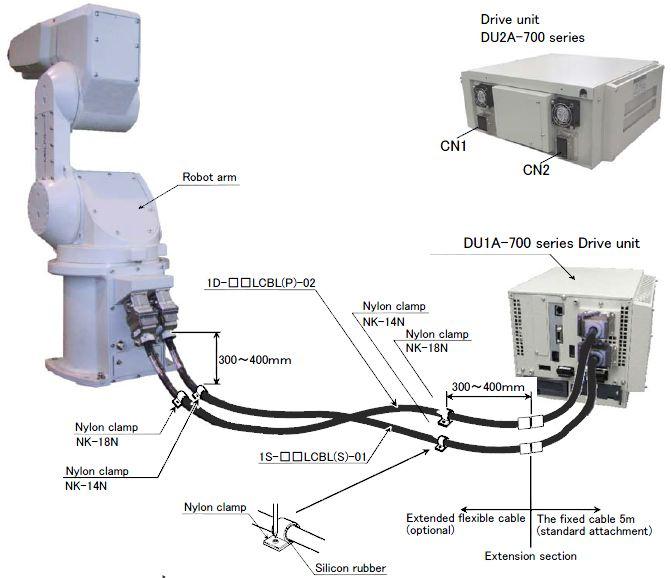
2.3 Roboti juhtimine
Roboti juhtimiseks kasutatakse kontrollerit CR1QA-721 või CR2QA-721. Kontrolleri
ühendusskeem robotiga on toodud joonisel 2.4.
3 Tabel 1. Roboti RV-3SQ tehnilised andmed
4 Joonis 2.1. Roboti teljed
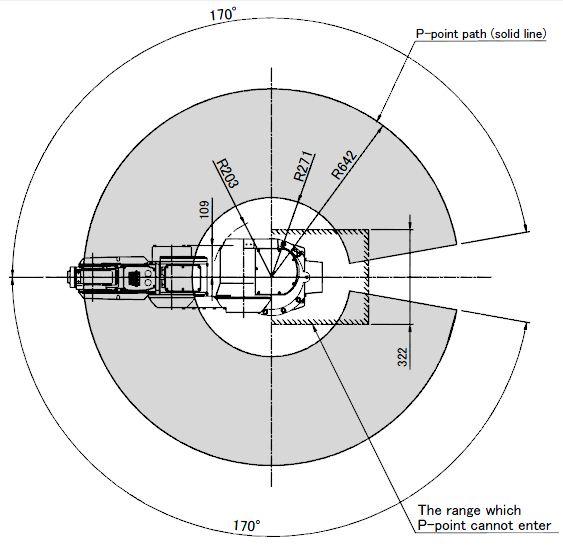
Joonis 2.2. Roboti tööpiirkond
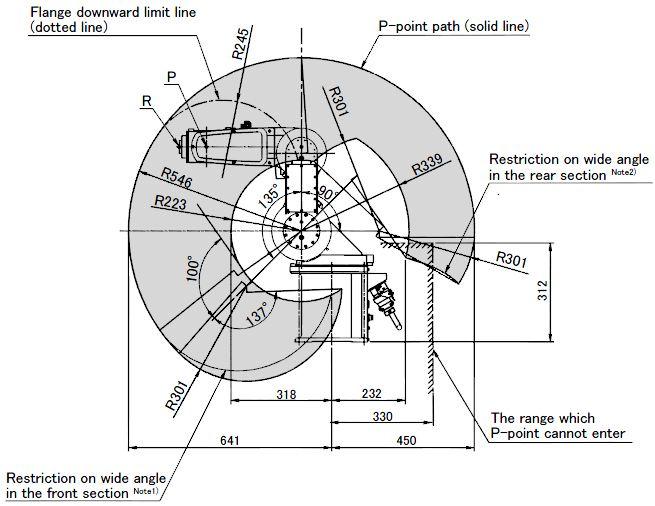
pealtvaates5 Joonis 2.3. Roboti tööpiirkond külgvaates
Joonis 2.4. Roboti ühendamine juhtmooduliga
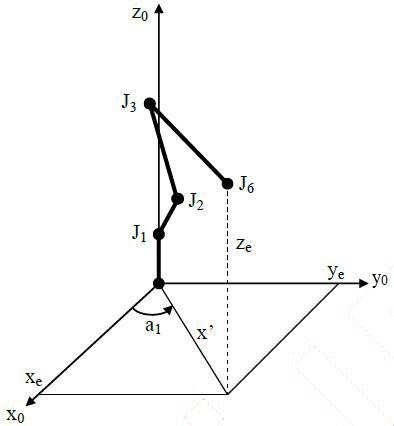
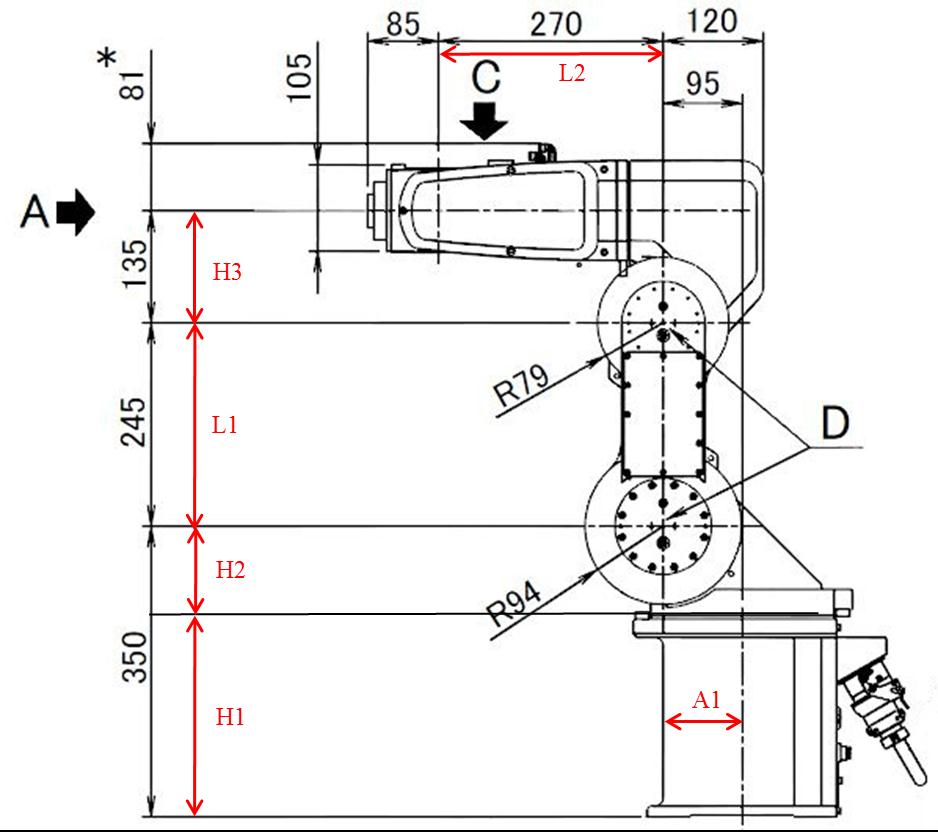
6 Joonis 2.5. Lihtsustatud kinemaatika skeem
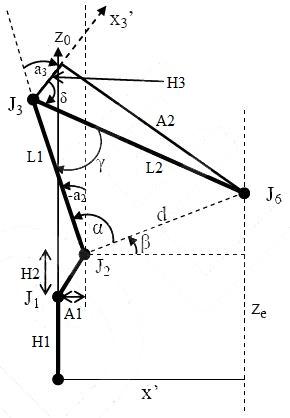
Joonis 2.6. Kinemaatika lisaskeem (külgvaade)
7
Parameetrid :
H1=220mm
H2=130mm
H3=135mm
L1=245mm
L2=270mm
A1=95mm
1=J1
2=J2
3=J3
4=J4
5=J5
6=J6
3. Roboti kinemaatika otsene ülesanne Roboti kinemaatika otsene ülesanne seisneb haaratsi tööpunkti leidmises
baaskoordinaadistikus, pöördenurkade abil. Ülesande lahendamiseks on vaja koostada
teisendusmaatriksid, mille arvutamiseks
kasutan programmi
MathCad .
Teljestik nr 1 on baasteljestiku nr 0 suhtes pööratud nurga 1 võrra ning nihutatud vektori
[0;0;H1] võrra. Leiame esimese teisendusmaatriksi T01:
cos ( 1) sin ( 1) 0 0 sin ( 1) cos ( 1) 0 0
T01 0 0 1 H 1 0 0 0 1
Teljestik nr 2 on teljestiku nr 1 suhtes pööratud ümber x-telje -90°, ümber z-telje -90°, ümber
z-telje nurga 2 võrra ning nihutatud vektori [A1;0;H2] võrra. Leiame rotatsioonimaatriksi ja
selle abil teise teisendusmaatriksi T12:
1 0 0 cos ( 90deg ) sin( 90deg ) 0 cos ( 2) sin( 2) 0 R12 0 cos ( 90deg ) sin( 90deg ) sin( 90deg ) cos ( 90deg ) 0 sin( 2) cos ( 2) 0 0 sin( 90deg ) cos ( 90deg ) 0 0 1 0 0 1
sin( 2) cos ( 2) 0 R12 0 0 1 cos ( 2) sin( 2) 0
8 Teisendusmaatriks T12
sin( 2) cos ( 2) 0 A1 T12 0 0 1 0 cos ( 2) sin( 2) 0 H2 0 0 0 1
Teljestik nr 3 on telejstiku nr 2 suhtes pööratud ümber z-telje nurga 3 võrra ning nihutatud
vektori [L1;0;0] võrra. Leiame kolmanda teisendusmaatriksi T23:
cos ( 3) sin ( 3) 0 L1 sin ( 3) cos ( 3) T23 0 0 0 0 1 0 0 0 0 1
Teljestik nr 4 on teljestiku nr 3 suhtes pööratud ümber x-telje -90°, ümber z-telje -90°, ümber
z-telje nurga 3 võrra ning nihutatud vektori [H3;A2;0] võrra. Leiame rotatsioonimaatriksi ja
slle abil
neljanda teisendusmaatriksi T34:
1 0 0 cos ( 90deg ) sin( 90deg ) 0 cos ( 4) sin( 4) 0 R34 0 cos ( 90deg ) sin( 90deg ) sin( 90deg ) cos ( 90deg ) 0 sin( 4) cos ( 4) 0 0 sin( 90deg ) cos ( 90deg ) 0 0 1 0 0 1
sin( 4) cos ( 4) 0 R34 0 0 1 cos ( 4) sin( 4) 0
Teisendusmaatriks T34
sin( 4) cos ( 4) 0 H3 T34 0 0 1 A2 cos ( 4) sin( 4) 0 0 0 0 0 1
Üldistatud teisendusmaatriksi saame kõikide eelneva nelja teisendusmaatriksi
korrutamisel .
Kuna see korrutis on sümbolkujul väga pikk, siis
kirjutan välja vastuse juhul, kui oleme kõik
neli pöördenurka lugenud 0-ks.
T04 T01T12 T23T34
0 0 1 450 T04 1 0 0 0 0 1 0 730 0 0 0 1
9 Teisendusmaatriksi neljanda
veeru kolm esimest liiget moodustavadki vektori, mis näitab
roboti haaratsi koordinaadistiku paiknemist baaskoordinaadistikust. Selleks on [450 ; 0 ; 730]
mm, mis langeb kokku kinemaatikaskeemil väljatoodud mõõtmetega. Järelikult on leitud
maatriks õige.
Lahendan antud ülesande järgmiste vabalt valitud nurkade järgi:
1 20deg 0.349rad A1 95 H2 130 2 10deg 0.175rad A2 355 H3 135 3 25deg 0.436rad H1 220 L1 245 4 75deg 1.309rad
Tulemuseks andis MathCad teisendusmaatriksi:
0.748 0.01 0.663 295.804 0.503 0.661 T04 0.557 248.209 0.433 0.75 0.5 519.638 0 0 0 1
Vastuseks saame vektori [295,804 ; 248,804 ; 519,638] mm.
4. Roboti kinemaatika pöördülesanne Roboti kinemaatika pöördülesande eesmärgiks on leida roboti
telgede pöördenurgad.
Lähteandmetena kasutan eelmises ülesandes leitud asendivektori koordinaate:
[295,804 ; 248,209 ; 519,638] mm.
Ülesande lahendamisel on abiks Joonis 4.1 kus on näha roboti positsioon ning ära näidatud
resulteeruvad kolmnurgad, mille abil pöördenurki arvutada.
10 Joonis 4.1 Roboti positsioon ning resulteeruvad kolmnurgad.
Leiame nurga a1
Pythagorose teoreemi järgi:
( ) ( )
Leiame nurga a2
Valem nurga a2 leidmiseks:
Nurkade ja jaoks tuleb leida pikkus d (vt Joonis 3.1):
( ) ( ) ( ) ( )
leiame koosiinusteoreemi järgi:
11 ( ) ( )
Leiame nurga a3
Valem nurga a3 leidmiseks:
leiame koosiinusteoreemi järgi:
leiame kolmnurgast L2A2H3:
( ) ( )
Pöördülesande lahenduseks on nurgad vastavalt: 1 40; 2 20; 3 0.
Nagu näha, langevad arvutatud nurgad kokku nendega, mida kasutasime eelmises ülesandes
nihkevektori arvutamiseks. Järelikult võib antud ülesande lahenduse lugeda tõeseks.
5. Roboti sirgjoonelise liikumise planeerimine
5.1 Ülesande sisu
Ülesande
sisuks on
planeerida roboti käe sirgjooneline liikumine punktist A punkti B.
Punktidevaheline liikumine peab olema võimalik ning punktid peavad asuma selle roboti
tööruumis. Arvestada tuleb ka selle roboti käe liikumise kiiruse ja kiirenduse piiranguid.
Algandmed:
Punktiks A võtan roboti käe asendi, kui kõik roboti lülid on pööratud 0 kraadi võrra:
1 0°; 2 0°; 3 0°; 4 0°; x 4 0 mm; y 0 mm; z 730 mm
12 Punktiks B võtan roboti käe asendi, mille arvutasime kinemaatika
otseses ülesandes:
1 40°; 2 -20°; 3 0°; 4 1 0°; x 29 ,804 mm; y 248,209 mm; z 19,638 mm
5.2 Ülesande lahendus
Punktide A ja B vaheline kaugus:
( ) ( ) ( )
( ) ( ) ( )
Liigendite maksimaalsed kiirused võtan tehniliste andmete tabelist (vt Tabel 1):
Esimesele liigendile J1:
Teisele liigendile J2:
Kolmandale liigendile J3:
Kuuendale liigendile J6:
Arvutame erinevate liigendite teekonna läbimise ajad, ning vastavalt sellele valime ka
liikumise protsessi kestuse:
Kõige
aeglasem lüli on antud juhul J6. Valime protsessi
kestuseks 3 sekundit, kuna nii on
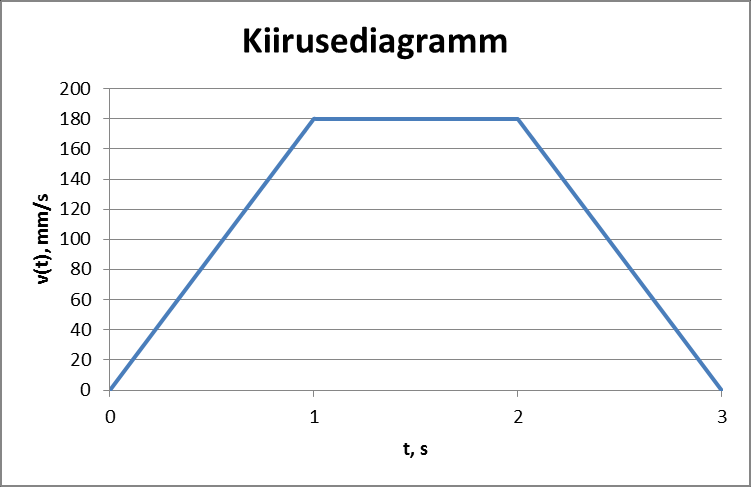
lihtsam arvutada. Liikumisprotsessi võib iseloomustada trapetsikujulise diagrammiga (vt
Joonis 5.2), kus esimese sekundi jooksul toimub kiirendamine, teise sekundi jooksul ühtlasel
kiirusel liikumine ning kolmanda sekundi jooksul
pidurdamine . Vastavalt sellele jaotamegi
protsessi kolmeks etapiks, kus ühe etapi kestuseks on üks sekund.
13 Joonis 5.2 Kiirusdiagramm
1.Etapi võrrandid üldkujul
( )
{ ( ) ( )
Kuna algushetkel asend ning kiirus on
nullid , siis c01=0 ja c11=0. Maksimaalne kiirus
arvutatakse lähtudes sellest, et kogu tee pikkus Smax on kiirustrapetsi pindala. Antud trapetsi
pindala on:
ab 1 3
Smax S h h 2 h , 2 2
kus a, b on liikumise ajad ning h on maksimaalne kiirus vmax , mida saab arvutada:
Maksimaalne kiirendus on:
c21 saame avaldada kiirenduse põhivõrrandist:
Võrrandid esimese etapi jaoks on seega:
14 ( )
{ ( ) ( )
2. Etapi võrrandid üldkujul
Teisel etapil kiirendus puudub ja kiirus on
konstantne , seega saame avaldada c12:
Algushetkel t=1 asend s2=s1, c02 koefitsenti arvutatakse:
Võrrandid teise etapi jaoks on seega: ( )
{ ( )
3. Etapi võrrandid üldkujul ( )
{ ( ) ( )
Teades, et kiiruse
trapets on võrdhaarne, kiirendus a3 on võrdne kiirendusele a1, vastupidise
märgiga seega c23=-90,02. Kuna kiirus
momendil t 3 võrdub nulliga, siis c13 saab leida:
Selleks, et arvutada c03
vaatleme asendit kirjeldavat võrrandit momendil t 2. Asend peab sellel
momendil võrduma s2(2)=270,03, seega:
( ) ( )
Võrrandid kolmanda etapi jaoks on seega:
( )
{ ( ) ( )
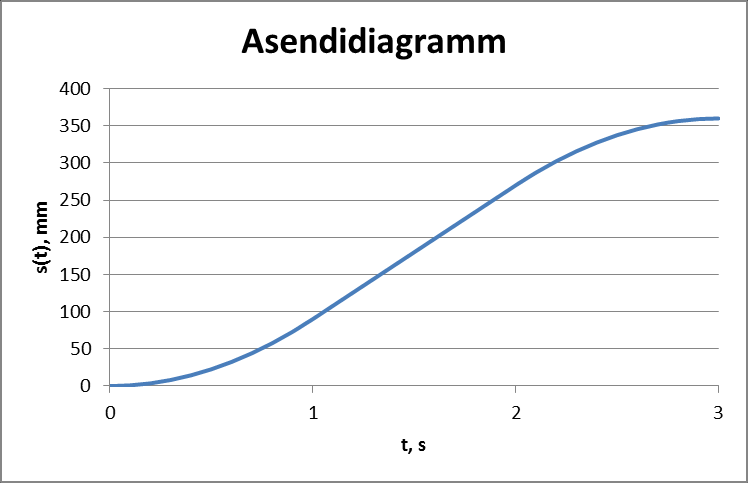
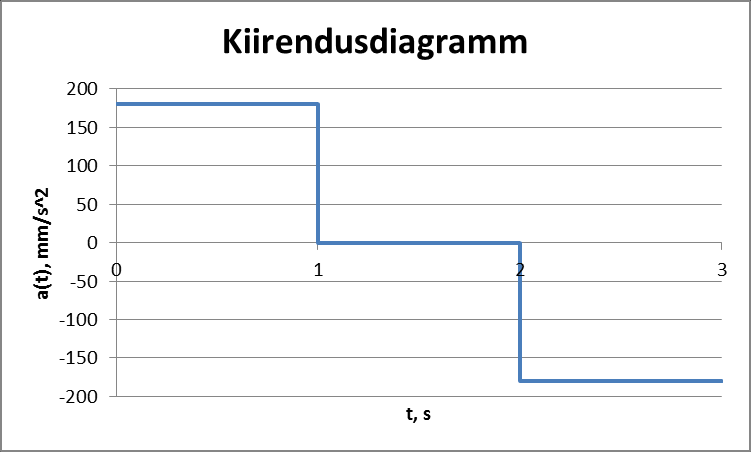
15 5.3 Diagrammid
Asendi-, kiiruse- ja kiirendusdiagrammid leidsin eelnevatele arvutustele tuginedes
programmida MS Excel 2010 (vt Joonis 5.3.1, 5.3.2 ja 5.3.3).
Joonis 5.3.1. Asendidiagramm
Joonis 5.3.2. Kiirusediagramm
Joonis 5.3.3. Kiirendusdiagramm
16 6. Kahetasandiline hierarhiline juhtimine Hierarhiat võib lugeda süsteemi keerukuse tunnuseks. Teatud keerukuse tasemest ei
saa enam üks juhtseade ülesannetega hakkama. Sel juhul võetakse kasutusele
mitmejuhtseadmeline süsteem, mis on hierathilise juhtimise põhimõtteks. Juhtimine muutub
siis mitmetasandiliseks. Koormused jaotatakse erinevate juhtseadmete peale ära ning sellega
tagatakse ülesannete edukas läbiviimine. Kahetasandilise juhtimise korral jagunevad
tasandid lokaalseks ja keskjuhtimiseks. Lokaaljuhtimine reguleerib ajamite tööd otseselt,
keskjuhtimine koordineerib terve roboti tööd.
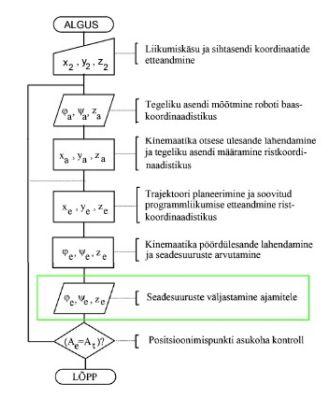
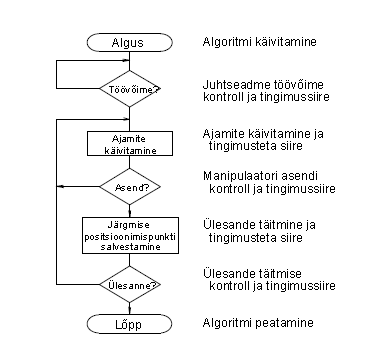
Joonisel 6.1 on välja toodud roboti juhtimise
algoritm roboti liikumise teostamiseks ning
joonisel 6.2 üldine juhtseadme algoritm.
Joonis 6.1. Roboti juhtimise algoritm
17 Joonis 6.2. Roboti üldine juhtseadme algoritm
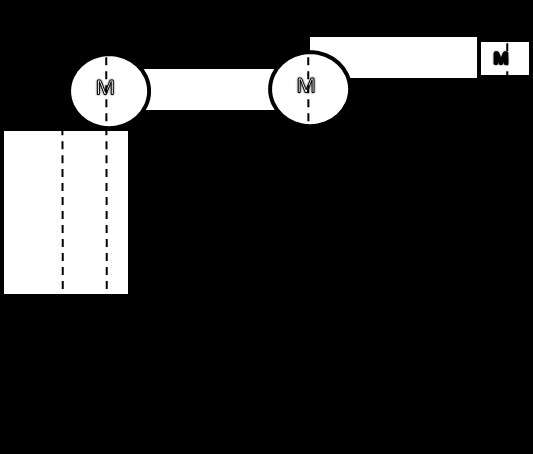
7. Esimese astme mootori vajaliku võimsuse hindamine Roboti esimese astme mootorile mõjub maksimaalne inertsimoment siis, kui robot on
horisontaalselt maksimaalselt välja sirutatud. Seda olukorda ära kasutades saamegi arvutada
vajaliku võimsuse. Abiks on lihtsustatud skeem (vt Joonis 6.1).
Joonis 7.1 Lihtsustatud inertsimomentide arvutusskeem
18 Mõõtmed leiame lk 6 joonis :
r1=95 mm; r2=340 mm; r3=765 mm
Kõik need suurused on leitavad jooniselt lk 6 va tõstetava eseme massikese, mille panin
ligikaudu 70 mm. Selle järgi arvestasin r3 lõplikku pikkuse.
Massid :
Tehniliste andmete tabelis nr 1 on ära märgitud terve roboti käe mass 37 kg ning suurim
lubatud tõstekoormus 3, kg. Kuna massid iga lüli kohta eraldi puuduvad, siis arvestan need
ligikaudu ise. Eeldan, et alus moodustab terve roboti massist kõige suurema osa 1 kg.
Raskuselt teisel kohal on teine lüli koos mootoriga m1 12kg. Kolmanda lüli ja mootori m2
massiks võtan m2
10kg ning
viimaseks punktmassiks võtan suurima lubatud tõstekoormuse
m3 3, kg. Kokkuvõttes:
m1=12 kg; m2=10 kg; m3=3,5 kg
Lüli maksimaalse kiirenduse leian, arvestades kiirenduse kestuseks 0, s:
Liikuvate osade inertsimomendid:
Osade momendid eraldi:
Summaarne moment:
Mootori võimsus:
19 Saadud vastust ei saa kindlasti üheselt lugeda vajalikuks mootori võimsuseks, kuna arvutused
on üsnagi üldistatud. Siinkohal peaks kindlasti arvestama ka väikese reservvõimsusega, kuid
üldjoontes sai vajaliku võimsuse mastaabist ettekujutluse.
8. Kokkuvõte Antud töö andis üsnagi hea piltliku ja
teoreetilise ettekujutluse sellest, kuidas
lahendada kinemaatilisi ülesandeid, pöördülesandeid ning sirgjoonelise juhtimise ülesandeid.
Selgemaks said roboti juhtimissüsteemi olemus ning roboti ehitus ja kasutusvõimalused. Töö
oli huvitav, ent samas üsnagi keeruline. Kokkuvõttes võib töö lugeda õnnestunuks, sest andis
põhjalikud
algteadmised roboti olemusest.
20





































Kõik kommentaarid