4 4A132S8 4 705 85 Määran trumli pöörlemissageduse: Määran ajami ülekandearvu iga mootori variandi jaoks: n nom u = n tm 18,6 9,32 6,17 4,58 Jaotan üldise ülekandearvu ajami astmete vahel: Võtan kõikide mootori variantide jaoks ühesuguse reduktori ülekandearvu: ukü = 3,55 u ulü = u kü 1 2 3 4 Ajam,u 18,6 9,32 6,17 4,58 Kiilrihmaülekanne, ulü 5,31 2,63 1,74 1,3
Ptm = Fv = 3 103 1,1 = 3,3 kW Ptm=3,3 kW 3.Määran ajami kasuteguri: = kü lü s vl2 ll2 tm Ajami üldkasutegur nmin+g*(nmax- g 0.5 nmin nmax nmin) 1 Kiilrihm 1 0.94 0.96 0.95 2 Silinder reduktor 1 0.97 0.98 0.975 3 Elastne doroidsidur 1 0.98 4 Konveieri lint 1 0.94 0.96 0.95 5 Laagrid paar tk 1 0.99 6 Laagrid paar tk 1 0.99 7 Laagrid paar tk 1 0.99 8 Laagrid paar tk 1 0.99 Kokku 0.83
Telgede vahe eeödatav diapasoon: awmin = √290 × mmin mm --> awmin = √290 × 20,9 ≈ 78 mm awmax = √290 × mmax mm --> awmax = √290 × 41,8 ≈ 110 mm Telgede vahe 3 𝑇 103 3 209 × 103 a𝑤 ≥ 43 × (𝑢 + 1) × √ᴪ×𝑢22 ×[𝜎]2 𝐾𝐻𝛽 = 43 × (4 + 1) × √0,32 × 42 × 6072 × 1 ≈ 𝐻 105mm Ka – abitegur. Kaldhammaste jaoks Ka = 43 u – reduktori ülekandearv, u=4 ᴪ𝑎 – suure ratta hambavöö laius ᴪ𝑎 = 0,28 … 0,36, kui väike hammasratas asub tugede suhtes sümmeetriliselt (mõlemad laagrist ühekaugusel) ᴪ𝑎 = 0,28 + 0,8 𝑔, kus g on optimismitegur T2 – pöördemoment reduktori aeglasekäigulisel võllil, Nm [𝜎]H – vähem tugevama ratta lubatud kontaktpinge (kui mõlema ratta kõbadus H ≥ 45HRC), N/mm2 KHβ – tegur, mis arvestab koormuse ebaühtlaselt jaotumist hamba pikkusel. Kui vähemalt ühe
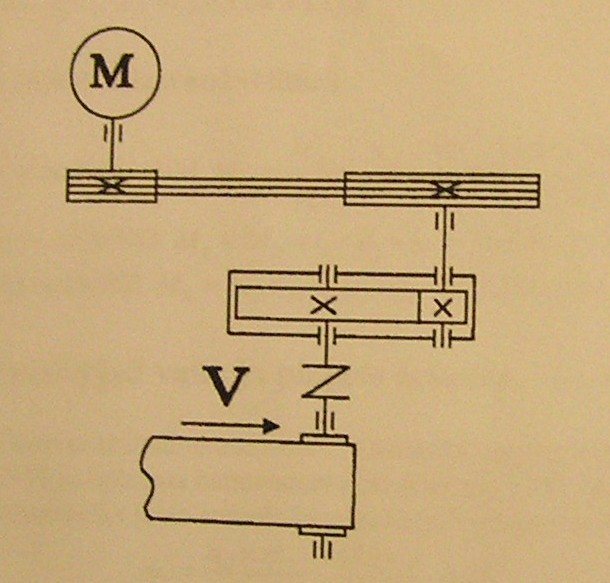
Reduktori projekteerimise näide 1. Mootori võimsuse arvutamine ja mootori valik Joon. 1. Konveieri trumli ajami kinemaatikaskeem 1 – mootor; 2 – sidur; 3 – hammasrattad (hammasülekanne) ; 4 – reduktori korpus; 5 – sidur; 6 – vedav rihmaratas; 7 – rihm; 8 – veetav rihmaratas; 9 – konveieri trummel; 10 – konveieri lint. Pöördemomendid ja pöörlemissagedused võllidel: Võll I - Т1 ja n1; Võll II - T2 ja n2; Võll III ehk töövõll T3 ja n3. Lähteandmed mootori valikuks: F = 3,3 kN, v = 2 m/s, D = 0,35 m, kus F on lintkonveieri koormus; v on lindi liikumise kiirus; D konveieri trumli läbimõõt.
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHE0050 PÕHIÕPPE PROJEKT ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: IGOR PENKOV TALLINN 2015 Üliõpilane Mattias Liht Üliõpilaskood 134578 MHE0050 – PÕHIÕPPE PROJEKT PROJEKTÜLESANNE 1. Projekteerida elektriajamiga vints. 2. Prototüüp: Vints koosneb järgnevatest põhielementidest: - mootorreduktor - raam - trummel - laagerdus - reduktori ja trumli ühenduselemendid - lüliti ja juhtimispult 3. Tehnilised karakteristikud Trossi kandevõime (kg) valida vastavalt üliõpilaskoodi viimasele numbrile A m = 1100 kg
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT KODUTÖÖ AINES "MASINATEHNIKA" TIGUÜLEKANNE JA VÕLLIKOOSTU PROJEKTEERIMINE ÜLIÕPILANE: KOOD: JUHENDAJA: Igor Penkov TALLINN 2006 Sisukord 1. Mootori valik ................................................................................................... 3 2. Tiguülekanne arvutus ....................................................................................... 4 3. Võlli projektarvutus ......................................................................................... 7 4. Võlli kontrollarvutus ........................................................................................ 9 5. Liistu arvutus ................................................................................................... 10 6. Siduri valik ........................................................................
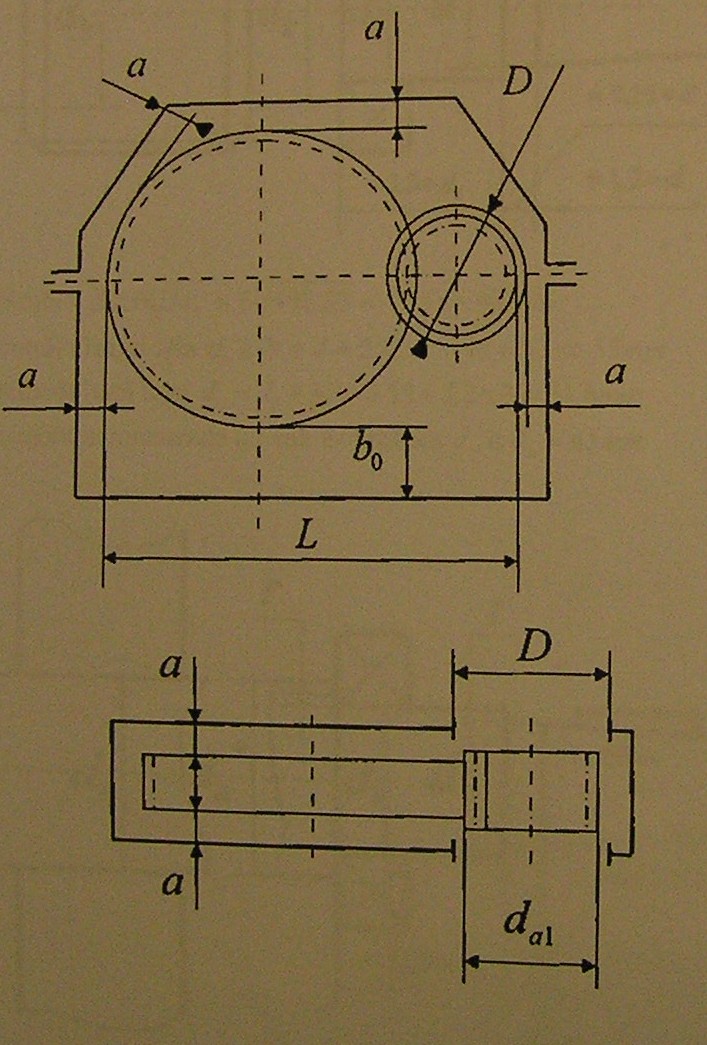
Hammasratast fikseeriva liistu arvutus: 2300 p= = 89 MPa < [p] 0,0350,0480,004 Valtsirauda fikseeriva liistu arvutus: 2300 p= = 176 MPa > [p] 0,0250,0340,004 Paigutame 2 liistu mõlemale poole võlli: 2300 p= = 88 MPa < [p] 20,0250,0340,004 9. Kokkuvõte Selle projekti eesmärgiks oli kavandada töötav käsivalts. Arvestades asjaoluga, et see oli esimene suurem projekt, siis õppisin üpris palju. Esiteks muidugi seda, et asjadega peaks varem pihta hakkama. Lõpuks aga said kauakirutud joonised tehtud ning aruannegi, mida te hetkel käes hoiate, valmis kirjutatud. Valmistootena peaks see valts muutma mõõkade valmistamise meistrite käe all hulga lihtsamaks, andes taaskehastajatele ning kollektsionääridele võimaluse saada neid muljetavaldavaid ning töökindlaid relvi soodsama hinnaga. Kui vähegi võimalust on, sooviks ka ise
.............................................................................. 16 8. TÕSTEMEHHANISMI ELEKTRIMOOTORI VALIK ................................................... 18 8.1. Staatilise võimsuse Pst leidmine ......................................................................................... 18 8.2. Elektrimootori valimine ..................................................................................................... 18 9. TÕSTEMEHHANISMI ÜLEKANDEARVU JA STANDARDSE REDUKTORI MÄÄRAMINE ............................................................................................................................ 19 9.1. Trumli pöörlemise sageduse ntr leidmine........................................................................... 19 9.2. Reduktori ülekandearvu irad leidmine ................................................................................ 19 10. PIDURI VALIK .......................................................................................






























Kõik kommentaarid