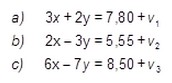
Iseseisev töö nr 4. Mõõtmistulemuste võrrandite lahendamine vähimruutude meetodil. Ülesanne 1. Antud on kolm lineaarset mõõtmistulemuste parameetrilist võrrandit: 1) Leida tundmatute parameetrite X ja Y kõige tõenäolisemad väärtused vähimruutude meetodil. Mõõtmistulemused on võrdsete kaaludega. Kuna mõõtmistulemused on võrdsete kaaludega, siis paregusel juhul neid arvestama ei pea ja kaalumaatriksit arvutustes kasutada ei ole vaja. Vastavalt ette antud võrranditele kirjutame välja maatriksid A (Tabel 1) ja L (Tabel 2), mis vastavalt koosnevad tundmatute muutujate X ja Y kordajatest ning paremal pool võrdusmärki asetsevatest suurustest (mõõtmistulemustest). Tabel 1. Maatriks A 1 2 2 -3 2 -1
Praktikum nr 5. Nivelleerimisvõrgu tasandamine. Ülesanne 1. Tabelis 1 on antud lahtise nivelleerimiskäigu mõõtmisandmed. Lähtepunktide kõrgused on HA=34,286 m ja HB= 41,522 m. Koostada mõõtmistulemuste võrrandid ja maatriksid ning leida tundmatute punktide kõrgused ja standardhälbed ning mõõtmistulemuste parandid vähimruutude meetodil. Koostada tasandustulemuste koondtabel(Tabel 10). Tabel 1.Nivelleerimiskäigu mõõtmisandmed. Vastavalt lähteandmetele koostame parameetrilised võrandid geomeetrilise v nivelleerimise prototüüpvõrrandi Hj-He=ΔHej+ ΔH eeskujul. Vastavalt saame neli ej parameetrilist võrrandit: H1-HA=2,179+v1 H2-H1=3,243+v2 H3-H2=-3,797+v3 HB-H3=5,608+v4
Joon Arvutatud Mõõdetud Mk1-A 30.4793832 - A-B 1341.55967 1341.56 B-C 1005.489793 1005.49 C-Mk2 30.47731287 - Tabel 3. Arvutatud ja mõõdetud nurgad teodoliitkäigus Arvutatud ( Mõõdetud ( ° ) ° ) Nurk võrrandite tundmatute dx ja dy kordajatest. 3 esimest rida, kus paiknevad nurgalised elemendid, on läbi korrutatud radiaaniga sekundites (ρ= 206264,8’’). See on vajalik selleks, et maatriksiga K oleks ühikuline vastavus. Prototüüpvõrrand nurga BIF (Backsight-Instrument-Foresight) on: Maatriksi J esimene rida kujuneb , teine rida ja kolmanda rea elemendid võrrandiosa järgi
Praktikum nr. 8. GPS võrgu tasandamine Tasandada joonisel 1 kujutatud GPS-võrk maatriksite abil. Koostage mõõtmistulemuste võrrandid, A, L ja W maatriksid. Lähtepunktide koordinaadid on antud tabelis 1. Mõõdetud vektorite pikkused kooskovariatsioonimaatriksi elementidega on toodud tabelis 2. Joonis 1. Tasandatav GPS-võrk Tabel 1. Lähtepunktide geotsentrilised koordinaadid (WGS84) Punkt X (m) Y (m) Z (m) - - 4390283. A 1683429.8 4369532.52 745
3 2 -1 0 2 3 4 3 -5 1 2 -3 4 1 1 4 2 -1 0 2 2 3 2. Arvutada: D = 2 - 1 0 5 ; DA = A 1 -1 6 5. -3 1 2 0 4 3 2 1 1. Crameri valemid ehk lineaarse võrrandisüsteemi lahendamine determinantide abil. Dk Xk = , k = 1,2 ....n, DA kus DA on süsteemi maatriksi determinant ja Dk on determinant, milles süsteemi determinandis k- veerg on asendatud vabaliikmete veeruga. Crameri peajuht 1) vorrandisusteemi tundmatute arv m ja vorrandite arv n on vordsed, st nm ; 2) tundmatute kordajatest moodustatud determinant on nullist erinev.
Determinandi põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide teooria põhivalem. 6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv, kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud maatriks. 8. Süsteemi lahendamine Crameri valemitega. Maatriksi minor. Maatriksi astak. Maatriksi ridade ja veergude elementaarteisendused. Maatriksi rea juhtelement, treppmaatriks. Treppmaatriksi astak. Kronecker-Capelli teoreem 9. Gaussi meetodi sisu. 10. Kompleksarvu mõiste, imaginaarühik, kompleksarvu reaalosa ja imaginaarosa, kompleksarvude võrdsus, kaaskompleksarv. Kompleksarvude liitmise, korrutamise ja jagamise valemid. Kompleksarvu moodul, argument ja trigonomeetriline kuju
Erilahendi korral on C-le antud konkreetne arvuline väärtus. 8. Lineaarse võrrandisüsteemi maatrikskuju. Maatrikskujul antud võrrandisüsteemi lahendamisest. maatrikskuju: AX = B. võrrand, kus maatriks ise on otsitavaks. süsteemil on üks lahend, kui süsteemi maatriksil A leidub pöördmaatriks A-1 (detA on nullist erinev) ja võrrandeid ja tundmatuid on ühepalju (m = n). lahend avaldub: X = A-1B näiteks: Crameri valemid: 9. Lineaarse võrrandisüsteemi lahendamine Gaussi meetodiga. Esimeses etapis viiakse laiendatud maatriks elementaarteisendustega astmelisele kujule: a) Ainult nullidest koosnev rida paikneb allpool neist ridadest, kus on nullist erinevaid elemente. Sellise rea võib ka kirjutamata jätta edaspidi. b) Rea nn juhtelemendiks on võetud rea kõige vasakpoolsem nullist erinev element, millest allpool samas veerus on ainult nullid.
B = (bi) _ vabaliikmete maatriks-veerg, X = (xk) tundmatute maatriks-veerg. Nende maatriksite abil on lineaarse võrrandisüsteemi kuju AX = B. a. Antud võrrandisüsteemil võib leiduda ainult üks lahend, kui m = n ja DA 0. b. Süsteemil puudub lahend, kui võrrandid on vastuolulised. c. Süsteemil on lõpmata palju lahendeid,kui tundmatute arv on suurem võrrandite arvust või võrrandid on lineaarselt sõltuvad s.t. DA = 0. Sel juhul kasutatakse üldlahendit ja erilahendeid. Süsteemide lahendamise meetodid. 1. Lineaarse võrrandisüsteemi lahendamine maatrikskujul: Olgu antud lineaarne võrrandisüsteem maatrikskujul: AX = B Avaldades sellest tundmatu X, saame: X = A-1B. Seda meetodit on eriti mugav kasutada juhul, kui mitmel erineval süsteemil on






















Kõik kommentaarid