Praktikum nr. 8. GPS võrgu tasandamine Tasandada joonisel 1 kujutatud GPS-võrk maatriksite abil. Koostage mõõtmistulemuste võrrandid, A, L ja W maatriksid. Lähtepunktide koordinaadid on antud tabelis 1. Mõõdetud vektorite pikkused kooskovariatsioonimaatriksi elementidega on toodud tabelis 2. Joonis 1. Tasandatav GPS-võrk Tabel 1. Lähtepunktide geotsentrilised koordinaadid (WGS84) Punkt X (m) Y (m) Z (m) - - 4390283. A 1683429.8 4369532.52 745 25 2 - - 4511075. B 1524701.6 4230122.82 501 1 2 - - 4287476. C 1480308.0 4472815.18
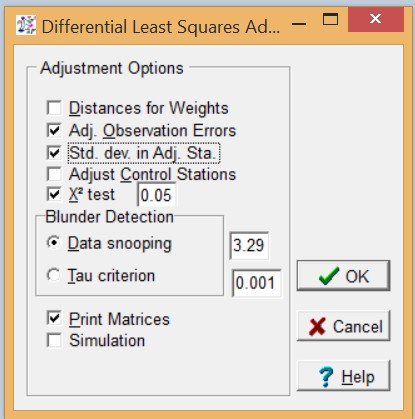
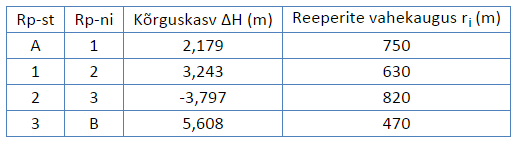
Ülesanne 1. Tasandada joonisel 1 toodud nivelleerimisvõrk programmiga Adjust. Kaaludena kasutage sektsioonide pikkusi L (km). Jämedate vigade avastamiseks kasutage Data Snooping testi. Andke hinnang tasandustulemusele tervikuna (χ²-test), tasandatud kõrguste ja kõrguskasvude täpsusele ning usaldusväärsusele. Vajadusel eemaldage jämedad vead või skaleerige kaalud ümber ja teostage tasandus uuesti. Võrrelge, mis on muutunud enne ja pärast tehtud tasandamise aruannetes. Joonis 1. Nivelleerimisvõrgu mõõtmisandmed (kõrguskasvud (m), jaamade arvud n, (m) ja sektsioonide pikkused L (km) koos lähtepunktide (A, B, C, D) kõrgustega. Esmalt valmistame ette sisendfaili. Esimesel real ülesande kirjeldus, teisel real lähtepunktide-, mõõtmiste- ja kogu punktide arv. Kolmandast reast alates on lähtepunktide kõrgused ja peale neid mõõdetud kõrguskasvud ning sektsioonide pikkused L (km). Sisendfail on toodud järgnevalt. Example Level Adjustment 4 10 8 BMA 138.744 BMB 158.732 BMC 140
Iseseisev töö nr. 8. GPS-võrgu tasandamine programmiga Adjust Tasandada Joonisel 1 kujutatud GPS-võrk vähimruutude meetodil programmiga Adjust. Lähtepunktid on punktid nr 2 (2904829,045; 1460511,739; 5468898,116) ja 5 (2901645,054; 1461580,539; 5470285,543). Andke tasandustulemustele hinnang jämedate vigade, kaalude valiku ja tulemuste usaldusväärsuse osas. Joonis 1. Tasandatav GPS-võrk Ülesande programmiga Adjust lahendamiseks peame esmalt koostama lähtefaili. Nagu ikka tuleb faili esimesele reale kirjutada töö pealkiri. Järgnevalt lähtepunktide, tundmatute punktide ja baasjoone vektorite arv. Kolmandale reale tuleb panna lähtepunktide andmed ning peale neid GPS kaugusvektorid ning kovariatsioonimaatriksi elemendid. Sisendfail on toodud järgnevalt. It 8 259 2 2904829.045 1460511.739 5468898.116 5 2901645.054 1461580.539 5470285.543 1 7 -2344.3456 2118.5216 667.7099 1.116536458000E-006 8.59E-07 1.084340252000E-006 1.1
Iseseisev töö nr 6. Kinnise teodoliitkäigu tasandamine programmiga Adjust. Andke hinnang tasandustulemustele üldiselt kaaluühiku standardhälbe S0 ja χ2-testi abil, esitage tundmatute punktide tasandatud koordinaadid koos täpsushinnangutega ning tasandatud mõõtmistulemused koos hälvete ja standardhälvetega. Teodoliitkäigu tasandamiseks kasutame programmi Adjust võimalust Least Squares Adjustment of Plane Surveys. Selle jaoks peame esmalt looma lähteandmetest sisendfaili. Faili esimesele reale tuleb kirjutada selgitav tekst (nt töö pealkiri), järgnevale reale tuleb kirjutada joonte, nurkade, direktsiooninurkade, lähtepunktide ning kõigi jaamade arv. Kolmandast reast alates lähtepunktide koordinaadid. Read 5-6 on tundmatud punktid koos ligikaudsete koordinaatidega. Järgnevalt mõõdetud kaugused ja mõõdetud nurgad koos standardhälvetega. Fail on toodud järgnevalt. IT6 34024 X 454.206864 628.921272 A 598.712544 337.456272 B 850.989408 681.173136 C 1140.0
3 KOHALIKU GEODEETILISE PÕHIVÕRGU 2. JÄRK__________________10 3.1 Kõrguslike lähtepunktide geomeetriline nivelleerimine ____________________ 10 3.1.1 Kasutatud instrumendid _________________________________________________12 3.1.2 Instrumentide kontroll __________________________________________________12 3.1.3 Metoodika põhipunktid _________________________________________________13 3.1.4 Nivelleerimiskäikude tasandamine ________________________________________13 3.1.5 Tasanduse täpsushinnang________________________________________________14 3.2 Mõõtmised polügonomeetria meetodil _________________________________ 15 3.2.1 Kasutatud instrumendid _________________________________________________15 3.2.2 Instrumentide kalibreerimine_____________________________________________18 3.2.3 Mõõtmiste metoodika __________________________________________________19
e- ope.ee/_download/euni_repository/file/1620/maam.zip/10%20loeng.pdf) Lahtise käigu korral on nii nurgad kui ka koordinaatide juurdekasvude summad hästi kontrollitavad. Samuti on võimalik taoliste piklike käikude puhul selgelt eraldada joonte ja nurkade mõõtmistest tingitud vigu, sest käigu pikisuunaline viga on ilmselt tingitud joonemõõtmise vigadest ja põiksuunaline viga nurgamõõtmise vigadest. Lahtise teodoliitkäigu tasandamine ja koordinaatide arvutus toimub põhimõtteliselt samuti kui kinnise käigu arvutus, erinevused on vaid sulgemisvigade leidmises. [Ka lahtise käigu korral koostatakse enne käigu tasandamist käigu skeem] Lahtise käigu korral on lähtedirektsiooninurkasid kaks. Kui need ei ole teada, sooritatakse arvutused analoogiliselt kinnise käiguga geodeesia pöördülesande abil. Nurgalise sulgemisvea valemi fb = b - alfa lõpp + alfa algus - n*180 kraadi puhul võiks esimeses
kõrguskasvude arvutamiseks. Kaldenurgad mõõdetakse teodoliidi (tahhümeetri) vertikaalringi abil. Enne kaldenurkade mõõtmist on vaja selgitada välja nulliasend (NA). Joone kaldenurga mõõtmiseks suunatakse niitristiku keskpunkti K tähisele instrumendi kõrgusele. ν = L v - NA, kus Lv on vertikaalringi lugem. 33. Vertikaalringi nulli ase ning selle arvestamine mõõtmistes 34. Kinnise mõõdistuskäigu arvutamine, täpsushinnang. (vt 1s6l) Horisontaalnurkade tasandamine: fβ = ∑βprakt – ∑βteor – sulgemisviga fβ < 1’√n pβ = - fβ / n β’ = β + pβ ∑β’ = ∑βteor Direktsiooninurkade arvutamine: Parem αi = αi-1 ± 180o – β’i ∑β = n * 180o + αa – αn ∑βt = 180o (n – 2) Vasak αi = αi-1 ± 180o + φ’i ∑φ = n * 180o – αa + αn ∑φt = 180o (n – 2) Koordinaatide juurdekasvude arvutamine:
Kaldenurgad mõõdetakse teodoliidi (tahhümeetri) vertikaalringi abil. Enne kaldenurkade mõõtmist on vaja selgitada välja nulliasend (NA). Joone kaldenurga mõõtmiseks suunatakse niitristiku keskpunkti K tähisele instrumendi kõrgusele. = L v - NA, kus Lv on vertikaalringi lugem. 33. Vertikaalringi nulli ase ning selle arvestamine mõõtmistes 34. Kinnise mõõdistuskäigu arvutamine, täpsushinnang. (vt 1s6l) · Horisontaalnurkade tasandamine: f = prakt teor sulgemisviga f < 1'n p = - f / n ' = + p ' = teor · Direktsiooninurkade arvutamine: Parem i = i-1 ± 180o 'i = n * 180o + a n t = 180o (n 2) Vasak i = i-1 ± 180o + 'i = n * 180o a + n t = 180o (n 2) · Koordinaatide juurdekasvude arvutamine: XBi = dBi * cos Bi YBi = dBi * sin Bi lub (fd/d) 1 /2000

























Kõik kommentaarid