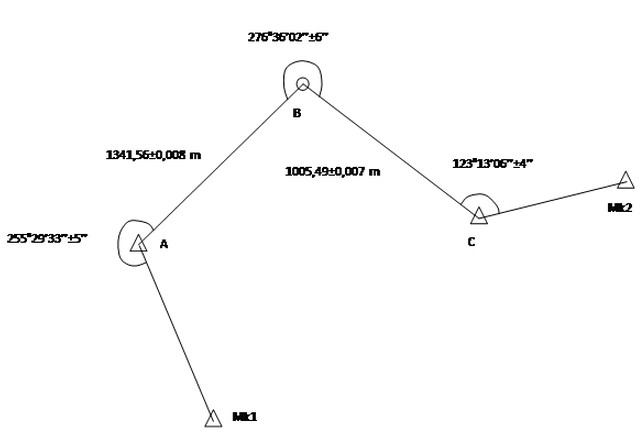
Praktikum nr. 8. GPS võrgu tasandamine Tasandada joonisel 1 kujutatud GPS-võrk maatriksite abil. Koostage mõõtmistulemuste võrrandid, A, L ja W maatriksid. Lähtepunktide koordinaadid on antud tabelis 1. Mõõdetud vektorite pikkused kooskovariatsioonimaatriksi elementidega on toodud tabelis 2. Joonis 1. Tasandatav GPS-võrk Tabel 1. Lähtepunktide geotsentrilised koordinaadid (WGS84) Punkt X (m) Y (m) Z (m) - - 4390283. A 1683429.8 4369532.52 745 25 2 - - 4511075. B 1524701.6 4230122.82 501 1 2 - - 4287476. C 1480308.0 4472815.18
Praktikum nr 5. Nivelleerimisvõrgu tasandamine. Ülesanne 1. Tabelis 1 on antud lahtise nivelleerimiskäigu mõõtmisandmed. Lähtepunktide kõrgused on HA=34,286 m ja HB= 41,522 m. Koostada mõõtmistulemuste võrrandid ja maatriksid ning leida tundmatute punktide kõrgused ja standardhälbed ning mõõtmistulemuste parandid vähimruutude meetodil. Koostada tasandustulemuste koondtabel(Tabel 10). Tabel 1.Nivelleerimiskäigu mõõtmisandmed. Vastavalt lähteandmetele koostame parameetrilised võrandid geomeetrilise v nivelleerimise prototüüpvõrrandi Hj-He=ΔHej+ ΔH eeskujul. Vastavalt saame neli ej parameetrilist võrrandit: H1-HA=2,179+v1 H2-H1=3,243+v2 H3-H2=-3,797+v3 HB-H3=5,608+v4 1 Järgnevalt leiame mõõtmistulemuste kaalud w= r , kus r on reeperite vahekaugus nivelleerimiskäigus. Leitud kaal
MTMM.00.340 Kõrgem matemaatika 1 2016 KÄRBITUD loengukonspekt Marek Kolk ii Sisukord 0 Tähistused. Reaalarvud 1 0.1 Tähistused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 0.2 Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0.3 Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 0.4 Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1 Maatriksid ja determinandid 7 1.1 Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2 Tehted maatriksitega . . . . . . . . . . . . . . . . . . .
juurdekasvudele proportsionaalselt joonte pikkustele Si. Järgmisena liidetakse koordinaatide juurdekasvudele nende parandid ja saadakse tasandatud juurdekasvud. Kontrolliks summeeritakse need ning tulemused peaksid võrduma teoreetiliste väärtustega x1-x2, y1-y2. Siis arvutatakse ülejäänud punktide koordinaadid, liites järjekorras teadaolevatele koordinaatidele vastavad juurdekasvud. Viimaks tuleb sooritada täpsushinnang, arvutades teodoliitkäigu absoluutse vea f ja suhtelise vea väärtused. Siinkohal peaks meeles pidama, et suhtelise vea nimetaja antakse maksimaalselt kolme tüvenumbriga. Absoluutne viga: f = (xruudus + y ruudus) Suhteline viga: f / s = 1 / (s/f) Käik on korrektselt mõõdetud, kui sulgemisviga jääb piiridesse 1' * (n - kinnise käigu nurkade arv) ja suhteline sulgemisviga ei ületa 1:2000. 35. Lahtise mõõdistuskäigu arvutamine, täpsushinnang (http://www.e- ope
MAJANDUSMATEMAATIKA I Ako Sauga Tallinn 2003 SISUKORD 1. MUDELID MAJANDUSES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Mudeli mõiste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Matemaatiliste mudelite liigitus ja elemendid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Matemaatilise mudeli struktuur ja sisu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2. FUNKTSIOONID JA NENDE ALGEBRA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Arvud ja nende hulgad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Funktsionaalne sõltuvus . . . . . . . . . .






















Kõik kommentaarid