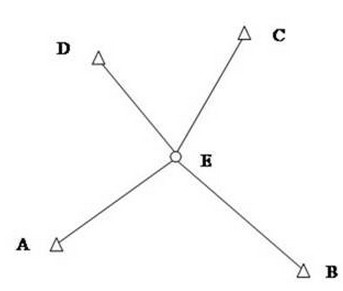
Tasandada joonisel 1 kujutatud GPS-võrk
maatriksite abil.
Koostage mõõtmistulemuste võrrandid , A, L ja W
maatriksid . Lähtepunktide
koordinaadid on antud tabelis 1. Mõõdetud vektorite pikkused
kooskovariatsioonimaatriksi elementidega
on toodud tabelis 2.
Joonis
1. Tasandatav GPS-võrk
Tabel 1.
Lähtepunktide geotsentrilised koordinaadid (WGS84)
Punkt
X (m)
Y (m)
Z (m)
A
-1683429.825
-4369532.522
4390283.745
B
-1524701.61
-4230122.822
4511075.501
C
-1480308.035
-4472815.181
4287476.008
D
-1725386.928
-4436015.964
4234036.124
Tabel 2.
Mõõdetud
vektorid ja kovariatsioonimaatriksi elemendid (m)
Baasjoon
dX
dY
dZ
AE
94208.555
61902.843
24740.272
0.00001287
-1.6E-07
-1.9E-07
1.62E-05
-0.00000016
1.54E-05
BE
-64519.667
-77506.853
-96051.488
0.00003017
-2.6E-07
0.00000021
2.83E-05
-0.00000025
2.56E-05
CE
-108913.237
165185.492
127548.005
0.00008656
-8.1E-07
-0.00000087
7.88E-05
-8.00E-07
8.65E-05
DE
136165.65
128386.277
180987.895
0.00005893
-6.6E-07
-0.00000059
6.71E-05
-0.00000064
5.23E-05
EA
-94208.554
-61902.851
-24740.277
0.00002284
0.00000036
-0.00000042
3.83E-05
-0.00000035
3.23E-05
EB
64519.65
77506.866
96051.486
0.00008244
0.00000081
-0.00000077
7.74E-05
-0.00000081
8.48E-05
EC
108913.236
-165185.494
-127547.991
0.00002784
-3.6E-07
0.00000038
3.40E-05
-0.00000035
2.62E-05
ED
-136165.658
-128386.282
-180987.888
0.00003024
-3.7E-07
0.00000031
3.94E-05
-0.00000036
3.90E-05
Kõigepealt koostame mõõtmistulemuste võrrandid. Need on toodud
järgnevalt baasjoone AE näitel- teised võrrandid koostatakse
analoogselt iga vastava baasjoone kohta.
dxAE= XE-XA
XE= dxAE+ XA
dyAE= YE-YA
YE= dyAE+ YA
dzAE= ZE-ZA
ZE= dzAE+ ZA
Mõõtmistulemuste võrrandite põhjal koostame L maatriksi (Tabel 3).
Tabel 3. Maatriks L
-1589221.27
-4307629.679
4415024.017
-1589221.277
-4307629.675
4415024.013
-1589221.272
-4307629.689
4415024.013
-1589221.278
-4307629.687
4415024.019
1589221.271
4307629.671
-4415024.022
1589221.26
4307629.688
-4415024.015
1589221.271
4307629.687
-4415023.999
1589221.27
4307629.682
-4415024.012
Maatriks A kujuneb parameetrilistes võrrandites tundmatute ees
olevate kordajatest (+1 või -1).
Tabel 4.
Maatriks A
1
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
0
1
-1
0
0
0
-1
0
0
0
-1
-1
0
0
0
-1
0
0
0
-1
-1
0
0
0
-1
0
0
0
-1
-1
0
0
0
-1
0
0
0
-1
Järgnevalt koostame kovariatsioonimaatriksi E, mille peadiagonaal
koosneb plokkidest. Ploki moodustavad tabelis 2 toodud elemendid ,
,
,,
ja .
Moodustatud 24x24 maatriks E ning selle pöördmaatriksiks olev
kaalumaatriks W on toodud lisatud
Excel ’i
failis .
Moodustatud maatriksid viime programmi
Matrix ning teeme läbi
tasanduse kaalutud
vähimruutude meetodil. Tulemusena saame X
maatriksi (Tabel 5), mis sisaldab otsitava punkti E koordinaate.
Lisaks saame kaaluühiku dispersiooni S02,
mille väärtuseks on 1,07605 ning S0= 1,037.
Tabel 5.
Maatriks X punkti E koordinaatidega
-1589221.27
-4307629.68
4415024.01
Nüüd saame arvutada χ2
statistiku, mille leiame valemi χ2=
abil. Vabadusastmete (v) arv kujuneb mõõtmiste (m) arvu ja
tundmatute arvu (n) vahena. Vabadusastmete arvuks praegusel juhul on
21. χ2
statistiku väärtuseks saame 22,597. Leiame statistiliste
jaotustabelite järgi vastavalt olulisuse nivoole α=0,05 ja
vabadusastmete arvule χ2
kriitilised väärtused.
Esmalt =35,479,
mille abil hindame kas saadud S0
on suurem kui 1 ning =
10,283, mille järgi hindame kas saadud S0
on 1st väiksem. Praegusel juhul jääb
teststatistik kriitiliste
piiride sisse ning kaaluühiku
standardhälve on statistilises mõttes
võrdne a’priori valitud
standardhälbega (δ=1). Kaaluühiku
standardhälve on 1’le lähedal, seega ei ole alust arvata, et
mõõtmistulemustes esineks jämedaid vigu.
Leitud punkti E koordinaatide usaldusväärsuse
hindamiseks leiame nende
standardhälbed Sx,
Sy
ja Sz.
Selleks kasutame valemit ,
kus
on parameetrite kofaktormaatriksi Qxx
i-nda rea ja i-nda
veeru element ning S0=1,037
tasandusjärgse kaaluühiku standardhälve. kofaktormaatriksi
Qxx
saame programmist Matrix. Leitud koordinaatide standardhälbed on
vastavalt ,
ja .
Standardhälbed jäävad maksimaalselt 2,2 mm piiresse ning võib
eeldada, et need on usaldusväärsed tulemused.
Tabel 6.
Kofaktormaatriks Qxx
3.78E-06
-2.61E-08
-1.40E-08
-2.61E-08
4.58E-06
-4.38E-08
-1.40E-08
-4.38E-08
4.14E-06
Järgnevalt leiame mõõtmistulemuste (mõõdetud vektorite)
standardhälbed. Selleks on meil vaja mõõtmistulemuste
kofaktormaatriksit, mis avaldub kujul .
Mõõtmistulemuste standardhälbed valemit
,
kus qjj
on mõõtmistulemuste kofaktormaatriksi Qjj
(Excel’i failis) diagonaalelement. Siinkohal toome välja ainult
baasjoone AE vektoritele arvutatud standardhälbed, sest teistele
vektoritele arvutatud standardhälbed on täpselt samad. Baasjoone AE
vektorite standardhälbed on ,
,
.
Näeme, et nagu leitud koordinaatide puhulgi ei ületa vektorite
standardhälbed 2,3 mm. Jällegi võib lugeda mõõtmistulemused
usaldusväärseiks. Siiski leiame mõõtmistulemuste
standardiseeritud hälbed jämedate
vigade olemasolu kontrolliks.
Standardiseeritud hälvete leidmiseks leiame
esmalt hälvete kofaktormaatriksi Qvv
(Excel’i failis) ja hälvete maatriksi V (Tabel 7).
Standardiseeritud hälbed (Tabel 8) leiame valemi
abil (vi-
mõõtmistulemuse hälve, qvv-
maatriksi Qvv
diagonaalelement). Siinkohal tuleb silmas pidada, et kui
standardiseeritud hälve on suurem kui 3,29*S0=
3,423, siis on see mõõtmistulemus 99,7% tõenäosusega jämeda
veaga ning tuleks mõõtmistulemuste seast eemaldada. Praegusel juhul
on maksimaalne standardiseeritud hälve baasjoone EC vektori dz puhul
3,086. Kriitilist suurust 3,29*S0
praegusel juhul ükski väärtus ei ületa ja võib eeldada, et
jämedaid vigu ei esine.
Tabel 7.
Hälvete maatriks V
-0.0012752
-0.0014982
-0.0035052
0.00572476
-0.0054982
0.00049483
0.00072476
0.00850181
0.00049483
0.00672476
0.00650181
-0.0055052
0.00027524
0.00949819
0.00850517
0.01127524
-0.0075018
0.00150517
0.00027524
-0.0065018
-0.0144948
0.00127524
-0.0015018
-0.0014948
Tabel 8.
Standardiseeritud hälbed vdi
BaasjoondxdydzvdxvdyvdzAE94208.555
61902.843
24740.272
0.4230
0.4393
1.0457
BE-64519.667
-77506.853
-96051.49
1.1145
1.1279
0.1068
CE-108913.237
165185.492
127548.01
0.0797
0.9867
0.0545
DE136165.65
128386.277
180987.9
0.9056
0.8225
0.7937
EA-94208.554
-61902.851
-24740.28
0.0630
1.6366
1.6037
EB64519.65
77506.866
96051.486
1.2713
0.8793
0.1676
EC108913.236
-165185.49
-127548
0.0561
1.1995
3.0856
ED-136165.658
-128386.28
-180987.9
0.2479
0.2545
0.2530

























Kõik kommentaarid