EESTI MAAÜLIKOOL Tehnikainstituut
Vello Lääts
Kursustöö ülesanne nr. 1
Kursusetöö õppeaines ,,Tõste- ja
edastusmasinad " TE.0255
Tootmistehnika eriala TA MAG II
Üliõpilane: "....." ................. 2012. a ......................................................... Vello Lääts
Juhendaja: "....." .................. 2012. a ......................................................... lektor
Eino AarendTartu 2012 SISUKORD
SISSEJUHATUS ........................................................................................................................... 3
1. LÄHTEANDMED.................................................................................................................... 3
2.
PAINDUV TÕSTEELEMENT ............................................................................................... 5 2.1. Trossiharu koormus ............................................................................................................. 5 2.2. Terastrossi valik ................................................................................................................... 6 2.3.
Trossi varuteguri kontroll .................................................................................................... 6
3.
TRUMLI ARVUTUS ............................................................................................................... 7 3.1. Trumli läbimõõdu Dtr leidmine ............................................................................................ 7 3.2. Trumli sein paksus ............................................................................................................... 8 3.3. Trumli
soone sammu t leidmine .......................................................................................... 8 3.4. Trumli soone raadius R leidmine ......................................................................................... 8 3.5. Trumli üldpikkuse l leidmine ............................................................................................... 8
4. TROSSI OTSTE KINNITUSVIISI VALIK TRUMLIL .................................................... 11
5. PLOKIRATASTE LÄBIMÕÕDU JA
STANDARDSE PLOKIRATTA
MÄÄRAMINE ............................................................................................................................ 13 5.1. Plokiratta läbimõõdu Dpl leidmine ..................................................................................... 13 5.2. Standardse plokiratta leidmine ........................................................................................... 13 6. PLOKI TELJE ARVUTUS.................................................................................................. 14 6.1. Plokiratta telje arvutusliku pikkuse lo leidmine ................................................................. 14 6.2. Plokirata teljele mõjuva maksimaalse
paindemomendi Mp leidmine ................................ 14 6.3. Plokiratta telje läbimõõdu d0 leidmine............................................................................... 14
7. LASTIKONKS ....................................................................................................................... 16 7.1. Lastikonksu valimine sõltuvalt tõstekoormusest ............................................................... 16 7.2. Lastikonksu tugevuse kontrollarvutus ............................................................................... 16
8. TÕSTEMEHHANISMI ELEKTRIMOOTORI VALIK ................................................... 18 8.1. Staatilise võimsuse Pst leidmine ......................................................................................... 18 8.2. Elektrimootori valimine ..................................................................................................... 18
9. TÕSTEMEHHANISMI ÜLEKANDEARVU JA STANDARDSE REDUKTORI
MÄÄRAMINE ............................................................................................................................ 19 9.1. Trumli pöörlemise sageduse ntr leidmine........................................................................... 19 9.2. Reduktori ülekandearvu
irad leidmine ................................................................................ 19
10. PIDURI VALIK ................................................................................................................... 20 10.1. Piduri tüübi valik.............................................................................................................. 20 10.2. Koormuse staatilise momendi Mk leidmine ..................................................................... 20 10.3. Pidurdusmomendi Mt leidmine ........................................................................................ 20
11. PÕHIELEMENTIDE
SPETSIFIKATSIOON .................................................................. 21 11.1. Trumli spetsifikatsioon .................................................................................................... 21 11.2. Plokiratta spetsifikatsioon ................................................................................................ 21 11.3. Lastikonksu spetsifikatsioon ............................................................................................ 21 11.4. Elektrimootori spetsifikatsioon ........................................................................................ 22 11.5. Reduktori spetsifikatsioon ............................................................................................... 22 11.6. Piduri spetsifikatsioon...................................................................................................... 22
KASUTATUD KIRJANDUS ..................................................................................................... 23
2 SISSEJUHATUS
Antud kursusetöö eesmärgiks on projekteerida tõsteseade vastavalt lähteandmetele.
Dimensioneeritud elemendid võetakse vastavast kursusetöö juhendist ja käsiraamatust.
1. LÄHTEANDMED
Kursusetöö teostamisel lähtuti järgmistest algandmetest: [1]
1. Variandi number 06. 2. Tõstetava koormuse väärtus Q = 80 kN. 3. Tõstekõrgus H = 11 m. 4.
Reziim keskmine reziim. 5. Trossi väikseim lubatud
varutegur kv = 5,5 [1, lk. 13, tabel 5] 6. Kandvate trossiharude arv z = 4 [1, lk. 12, tabel 4] 7. Veerelaagri kasutegur = 0,98 [1, lk. 13, tabel 6] 8. Polüsplasti ülekandearv Kn = 2
Seadme tõstevõime kilogrammides on leitud valemiga [2]
Q
80000 N F t0 8158 kg , (1.1) g 9.81
kus Ft0 seadme tõstevõime kg; Q Tõstetava koormuse väärtus N; g Maa
raskuskiirendus g = 9,81 m/s2.
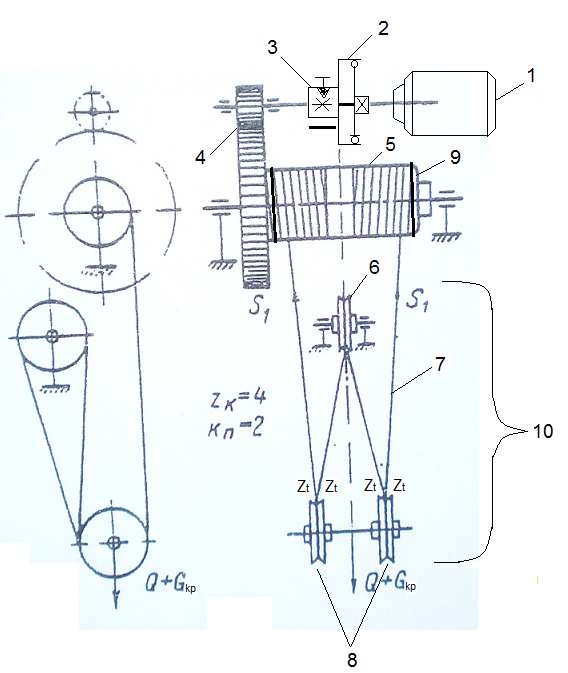
Tõsteseadme skeem on kujutatud joonisel 1.1.
3 Joonis 1.1. Tõsteseadme kinemaatiline skeem, kus: 1 on elektri mootor, 2
sidur , 3 pidur, 4
reduktor , 5
trummel , 6 polüspasti liikumatu
plokiratas , 7 tross, 8 polüspasti liikuvad plokirattad, 9 mahajooksu piirik, 10 polüspast, S1 enam
koormatud trossiharud, Q+Gkp lasti koormus+ lasti riputamise
mehanismi mass, zt
kandvad trossiharud. [1]
4 2. PAINDUV TÕSTEELEMENT
2.1. Trossiharu koormus
Enne trossiharus mõjuva jõu S01
leidmist on määratud vastavalt tõstetavale koormusele (Ft0 =
8,158 t) plokimehhanismi tüüp: 2-10 [1, lk. 21, tabel 24]. Trossi valimisel lähtutakse esiteks
ühe enam kooramatud trossiharu koormusest, mis on avaldatud järgneva valemiga [2, lk. 12].
Trossis mõjuv jõud S01 on leitud valemiga (2.2)
m ( 8158kg + 210kg ) 9.81 ( Ft0 +
Gkp0 ) g s 2 S 01 20934N , (2.2) Zk n 4 0.98
kus S01 esialgne enam koormatud trossiharu koormus N;
Gkp0 konksu ja ploki mass kg;
Zk kandvate trossiharude arv;
n veerelaagrite kasutegur.
Järgmisena leitakse arvutuslik trossi tõmbetugevus, kus arvestatakse tõstetava koormuse väärtust
ning varutegurit.
Arvutuslik jõud
S01a on leitud valemiga (2.3)
S 01a kv S 01 5.5 20934 N 115134 N 115.134 k N , (2.3)
kus S01a ühe trossiharu arvutuskoormus N; kv trossi väikseim lubatud varutegur [2, lk 14]; S01 trossi ühe haru suurim koormus N.
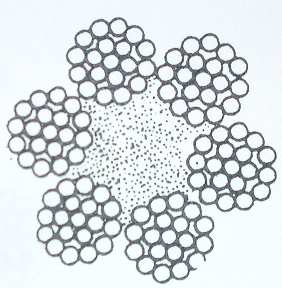
Valitud on kompaundkonstruktsiooniga trossitüüp: K-P [1, lk. 13, tabel 7]. Vastavalt
arvutusliku jõu S01a suurusele (traadi tõmbetugevusel 160·107 N/m2) on saadud trossi
läbimõõduks dtr = 15,0 mm [1, lk 14, tabel 9].
[1, lk. 22, tabel 25] põhjal olen veendunud, et valitud plokimehhanismile sobib sellise
läbimõõduga tross, sest valitud läbimõõduga tross sobib antud vahemikku.
5 2.2. Terastrossi valik
Järgnevalt valitakse sobiva tõmbetugevuse ning profiiliga terastross. Trossi andmed on toodud
tabelis 2.1.
Tabel 2.1. Terastrossi tehnilised parameetrid [1] Jrk.
Parameeter Väärtus nr.
kraanad , elektrilised
1 Kasutusala tõsteseadmed,
seadmed , kus trossi keritakse
2 Trossi läbimõõt dtr = 15,0 mm Traatide summaarne ristlõike
3 86,27 mm2 pindala Minimaalne
4
S0tr = 117 kN katkemiskoormus
5 Illustratsioon
2.3. Trossi varuteguri kontroll
Valitud standardtrossi sobivust kontrollitakse varuteguri
kehtivusega [2, lk 15].
Trossi tegelik varutegur kv on leitud valemiga (2.4)
S 0tr 117000 N k v01 5.589 , (2.4) S 01 20934 N
kus kv01 varutegur standardtoote korral, kv01 kv;
S0tro terastrossi minimaalne katkemiskoormus (S0tro = 117000N [1, lk. 14, tabel 9]) N;
S01 trossiharus mõjuv jõud (S01 = 20934N) N.
Kuna kehtib seos kv01 kv , siis on valitud õige läbimõõduga tross.
6 3. TRUMLI ARVUTUS
Valitud on silindriline, soontega (normaalsügavusega), kahe trossi
haruga trummel.
Trumli
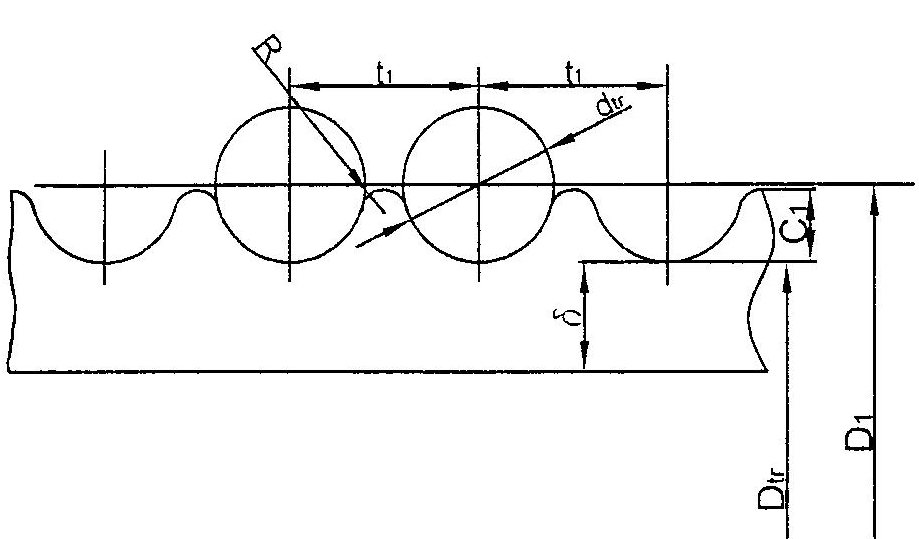
soonte eskiis on esitatud joonisel 3.1.
Joonis 3.1. Trumli soonte eskiis
Vastavalt trossi läbimõõdule dtr = 15 mm on tabelis 3.1 esitatud trumli soone mõõtmed [1, lk. 21,
tabel 24].
Tabel 3.1. Trumli soone mõõtmed mm [1, lk. 21, tabel 24] dtr R Normaalsoon t1 c1 15,5 9 17 5
3.1. Trumli läbimõõdu Dtr leidmine
Trumli läbimõõt Dtr on leitud valemiga (3.5)
D tr ( e - 1 ) d tr ( 25 - 1 ) 15 mm 360 mm , (3.5)
kus Dtr trumli läbimõõt mm; dtr trossi läbimõõt (dtr = 15 mm) mm; e reziimitegur (e = 25 [1, lk. 19, tabel 19]).
7 3.2. Trumli sein paksus
Malmtrumli seina paksus on leitud valemiga (3.6)
0.02 D tr + 10 0.02 360 + 10 17.2 mm , (3.6)
kus trumli seina paksus mm; Dtr trumli läbimõõt (Dtr = 360 mm).
Malmtrumlil peab olema täidetud tingimus 12 mm, seega on tingimus täidetud.
3.3. Trumli soone sammu t leidmine
Trumli soone samm t on leitud valemiga (3.7)
t d tro + 3 mm 15 + 3 18 mm , (3.7)
kus t soone samm mm; dtr trossi läbimõõt (dtr = 15 mm) mm.
3.4. Trumli soone raadius R leidmine
Trumli soone raadius R on leitud valemiga (3.8)
R 0.54 D tro 0.54 15 8.1 mm , (3.8)
kus R trumli soone raadius mm; dtr trossi läbimõõt (dtr = 15 mm) mm.
3.5. Trumli üldpikkuse l leidmine
Trumli üldpikkus koosneb üksikute sektsioonide pikkusest ja leitud valemiga (3.9)
l 2 ls + 2 lä + l0 , (3.9)
kus l trumli üldpikkus m; ls trumli keermestatud osa pikkus m; lä trumli äärmise
sileda osa minimaalne pikkus m; 8 l0 trumli keermestatud osade vahekaugus m.
Trumli keermestatud osa pikkus ls on leitud valemiga (3.10)
ls (z p + zs + zt ) t , (3.10)
kus ls trumli keermestatud osa pikkus m; zp trossi kinnituskeerdude arv trumlil (zp = 2 [1, lk. 24]); zs trossi varukeerdude arv lasti alumises asendis (zs = 2 [1, lk. 24]); zt trossi töökeerdude arv; t soone samm (t = 0,018 m).
Trossi töökeerdude arv zt on leitud valemiga (3.11)
z H 4 11 44 zt 19.5 , (3.11) 2 D tr 2 0.36 2.262
kus zt trossi töökeerdude arv; z koormust kandvate trossiharude arv (z = 4); H lasti etteantud tõstekõrgus (H = 11 m); Dtr trumli läbimõõt (Dtr = 0,36 m).
Seega valemi (3.10) põhjal saame trumli keermestatud osa
pikkuseksls ( 2 + 2 + 19.5 ) 0.018 0.423 m
Trumli äärmise sileda osa minimaalne pikkus la on leitud valemiga (3.12)
lä 3 t 3 0.018 0.054 m , (3.12)
kus lä trumli äärmise sileda osa minimaalne pikkus m; t soone samm (t = 0,018 m) m.
Trumli keermestatud osade vahekaugus on leitud valemiga (3.13)
9 l0 (zpl ) - 1 lc ( 2 - 1 ) 0.0095 0.0095 m , (3.13)
kus l0 trumli keermestatud osade vahekaugus m; zpl polüspasti liikuva ploki plokrataste arv (zpl = 2); lc ploki rummu pikkus (lc = 0,0095 m, [1, lk. 22, tabel 25]).
Seega valemi (3.9) põhjal on trumli üldpikkus
l 2 l s + 2 lä + l 0 2 0.423 + 2 0.054 + 0.0095 0.963 m
[1, lk. 26, tabel 29] põhjal on trumli tüübik valitud K 500.
10 4. TROSSI OTSTE KINNITUSVIISI VALIK TRUMLIL
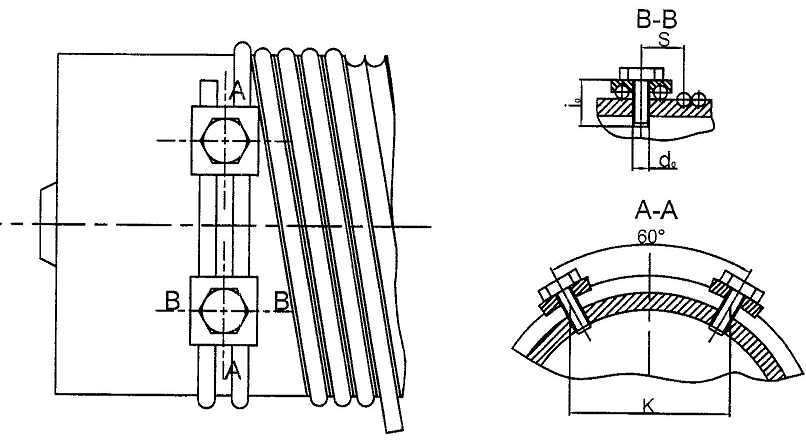
Terastross kinnitatakse trumlile soonestatud plaatidega.
Kinnitus plaatidega on kujutatud joonisel
4.1.
Joonis 4.1. Terastrossi kinnitus soonestatud plaatidega
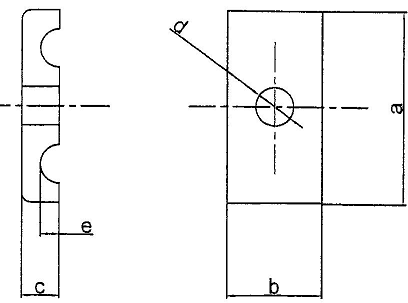
Kinnitusplaadi mõõtmed on esitatud tabelis 4.1.
Tabel 4.1. Kinnitusplaadi mõõtmed mm [1, lk 16, tabel 13] Kinnituskoha Poldi mõõtmed Plaadi mõõtmed mm Kinnituste dtr mõõtmed mm mm arv K S d0 i0 a c d e b 15 53 43 18 50 50 18 19 7 50 1
Tabelis 4.1 toodud kinnitusplaadi mõõtmete tähistused on esitatud joonisel 4.2.
11 Joonis 4.2. Kinnitusplaadi eskiis
12 5. PLOKIRATASTE LÄBIMÕÕDU JA STANDARDSE PLOKIRATTA
MÄÄRAMINE
5.1. Plokiratta läbimõõdu Dpl leidmine
Konksuploki plokiratta läbimõõt [1, lk 18].
Plokiratta läbimõõt on leitud vastavalt seosele (5.14)
D pl ( e - 1 ) d tr ( 25 - 1 ) 15 mm 360 mm , (5.14)
kus Dpl soone põhjast mõõdetud konksuploki plokirattaratta läbimõõt mm; e tegur, mis sõltub mehhanismi tööreziimist, [1, lk. 19, tabel 19]; dtr trossi läbimõõt (dtr = 15 mm) mm.
5.2. Standardse plokiratta leidmine
Seega saan [1, lk. 19, tabel 20] põhjal standardse plokiratta, läbimõõduga Dpl = 400 mm.
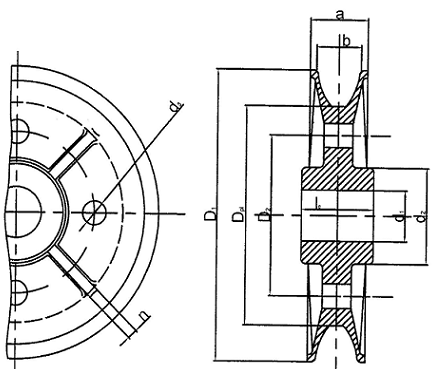
Plokiratta eskiis on esitatud joonisel 5.1.
Joonis 5.1. Plokiratta eskiis
13 6. PLOKI TELJE ARVUTUS
Kuna polüspast on nelja koormus haruga, siis plokirataste telje arvutuseks on valitud nelja
haruga arvutusskeem [1, lk. 28, joonis 41]
6.1. Plokiratta telje arvutusliku pikkuse lo leidmine
Tööploki telje pikkus leitakse järgmise valemiga (6.16)
(6.16)
kus l0 on plokkide telje pikkus m; i plokirataste arv
teljel (i = 2); lc1 plokiratta rummu pikkus (lc = 0,07 m [1, lk. 19, tabel 20]) m; 1 plokirataste kattepleki paksus m; 2 ribaterasest raami paksus m; 21 + 2 valime konstruktiivselt ette (21 + 2 = 0,04 m [1, lk. 28]).
6.2. Plokirata teljele mõjuva maksimaalse paindemomendi Mp leidmine
Plokiratta teljele mõjuv
paindemoment kahe ploki korral on leitud valemiga (6.17)
Mp l0 ( Q + G) - lc (8 104 + 230 ) 0.18 - 0.07 80230 0.028 2246.44 Nm , (6.17) 4 4 4 4
kus Mp plokiratta teljele mõjuv maksimaalne paindemoment Nm; Q tõstetav koormus (Q = 80 kN); G plokiratta mass (G = 230 N); l0 plokiratta telje arvutuslik pikkus (l0 = 0,18 m); lc ühe plokiratta rummu pikkus (lc = 0,07 m [1, lk. 19, tabel 20]).
6.3. Plokiratta telje läbimõõdu d0 leidmine
Plokiratta telje läbimõõt d0 on leitud telje tugevustingimusest paindele (6.18) [1, lk 29]. 3 3 Mp Mp -6 2246.44 10 (6.18) p p , ehk d0 0.06m 3 0.1 p 0.1 100 0.1 d 0
14 kus d0 on esialgne arvutslik konksuploki telje läbimõõt m; [p] lubatud paindepinge koormuse pulseerides ([p] = 100 Mpa [1, lk. 29]); Mp plokiratta teljele mõjuv maksimaalne paindemoment Nm.
Reaalse ning arvutusliku telje läbimõõdu suhe kehtib, seega antud läbimõõduga telg sobib
sellises olukorras.
Seega vastavalt standardile võtan plokiratta telje läbimõõduks d0 = 60 mm [1, lk. 19, tabel 20].
15 7. LASTIKONKS
7.1. Lastikonksu valimine sõltuvalt tõstekoormusest
Lastikonks valitakse vastavalt tõstevõimele ning ümardatakse lähema standartse mõõdu suunas
üles. Antud ühepoolne
sepistatud lastikonks on valitud mehaanilise
ajamiga tõstemehhanismile,
mis on valitud vastavalt tõstetavale koormusele. Kuna antud ülesande lähteandmetes oli nõutav
tõstevõime 80 kN siis valitakse
konks , mille tõstevõime on 100 kN [1, lk. 30, tabel 32].
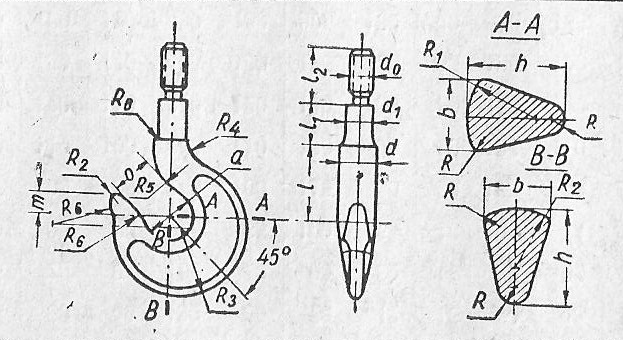
Lastikonksu eskiis on esitatud joonisel 7.1.
Joonis 7.1. Ühepoolse lastikonksu eskiis [1, lk 30]
7.2. Lastikonksu tugevuse kontrollarvutus
Konksu tugevust on kontrollitud tugevustingimusest (7.19) Q t t , (7.19) 2 d1
4
kus t pinge tõmbel MPa; Q tõstetav koormus (Q = 80 kN); d1 keerme siseläbimõõt (d1 = 0,07 m [1, lk. 30, tabel 32]); [t] lubatud pinge tõmbel ([t] = 100 MPa [1, lk. 30]).
16 80000 t 20.788MPa 2 0.07 4
Seega kehtib seos t [t] ja lastikonks peab tõstetavale koormusele vastu.
17 8. TÕSTEMEHHANISMI ELEKTRIMOOTORI VALIK
8.1. Staatilise võimsuse Pst leidmine
Staatiline võimsus Pst on leitud valemiga (8.20)
( Q + G) v k ( 80000 + 2100 ) 0.2 P st 17886.71 W 17.89 kW , (8.20) 1.02 p 1.02 0.9
kus Pst staatiline koormus W; Q tõstetav koormus (Q = 80 kN); G konksuploki
omakaal (G = 2100 N [1, lk. 22, tabel 25]); vk koormuse tõstekiirus (vk = 0,2 m/s); p polüspasti kasutegur (p = 0,9).
8.2. Elektrimootori valimine
Vastavalt seosele Pst Pem on elektrimootoriks valitud 15% lülituskestvusega
vahelduvvoolumootori tüüp MTK-42-8 Pem = 19,5 kW ja nm = 667 p/min [1, lk. 36, tabel 37].
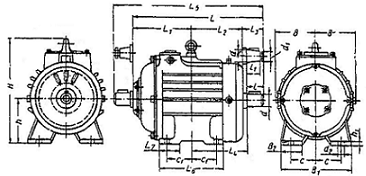
Joonisel 8.1 on kujutatud valitud vahelduvvoolumootori tüüpi MTK ja tabelis 8.1 on toodud
konkreetse vahelduvvoolumootori mõõtmed.
Joonis 8.1. Vahelduvvoolumootori tüüp MTK [1, lk. 36]
Tabel 8.1. Vahelduvvoolu mootori MTK-42-8 mõõtmed Võll Suurus Tüüp kuju mõõtmed mm L L1 L2 L3 L4 d d1 l l1 4 MTK-42-8
kooniline 65 2M42 140 105 771 298 316 157 333
18 9. TÕSTEMEHHANISMI ÜLEKANDEARVU JA STANDARDSE REDUKTORI
MÄÄRAMINE
9.1. Trumli pöörlemise sageduse ntr leidmine
Trumli pöörlemise sagedus ntr on leitud valemiga (9.21) 60 v k ip 60 0.2 2 p n tr 21.221 , (9.21) D tr 0.36 min
kus ntr trumli pöörlemise sagedus p/min; vk koormuse tõstekiirus (vk = 0,2 m/s); ip polüspasti kordsus (ip = 2); Dtr trumli läbimõõt (Dtr = 0,36 m).
9.2. Reduktori ülekandearvu irad leidmine
Reduktori ülekandearv irad on leitud valemiga (9.22) nm 667 i rad 31.431 , (9.22) ntr 21.221
kus irad reduktori ülekandearv; nm mootori pöörlemissagedus (nm = 667 p/min); ntr trumli pöörlemise sagedus p/min.
Vastavalt ülekandearvule irad = 31,431 on [1, lk. 39, tabel 39] valitud reduktori tüüpiks 2-300.
19 10. PIDURI VALIK
10.1. Piduri tüübi valik
Ohutuseeskirjade kohaselt, peab kõikidel tõste- ja transpordimasinatel olema piduriseade. Piduri
abil on võimalik
mehhanismide peatamine, lasti hoidmine
vajalikus kõrguses ja lasti langetamise
kiiruse reguleerimine. [2, lk 84].
10.2. Koormuse staatilise momendi Mk leidmine
Koormuse staatiline moment Mk on leitud valemiga (10.23) ( Q + G) D tr n 0 ( 80000 + 2100 ) 0.36 0.9 Mk 211.578Nm , (10.23) 2 ip irad 2 2 31.431
kus Mk koormuse staatiline moment Nm; Q tõstetav koormus (Q = 80 kN); G konksuploki omakaal (G = 2100 N [1, lk. 22, tabel 25]); Dtr trumli läbimõõt (Dtr = 0,36 m); 0 kasutegur (p = 0,9); ip polüspasti kordsus (ip = 2); irad reduktori ülekandearv.
10.3. Pidurdusmomendi Mt leidmine
Pidurdusmoment Mt on leitud valemiga (10.24)
Mt K tM k 1.75 211.578 370.262 Nm , (10.24)
kus Mt pidurdusmoment Nm; Kt reziimitegur (Kt = 1,75 [1, lk. 46]); Mk koormuse staatiline moment Nm.
Vastavalt pidurdusmomendi Mt järgi on valitud vahelduvvoolu elektromagnetiga pakk-sidur
TKT-300 [1, lk. 47, tabel 48].
Pidur on asetatud mootori võlli ja reduktori ühendavale siduri teisele poolele.
20 11. PÕHIELEMENTIDE SPETSIFIKATSIOON
11.1. Trumli spetsifikatsioon
Tabelis 11.1 on esitatud trumli spetsifikatsioon.
Tabel 11.1. Trumli spetsifikatsioon [1, lk. 26, tabel 29] Tüü Mõõtmed mm p D L D1 h t L1 L4 L2 L3 D2 B1 D3 S L5 K 500 1500 512 310 20 30 45 157 90 190 44 195 5 235 0,5 500
11.2. Plokiratta spetsifikatsioon
Tabelis 11.2 on esitatud plokiratta spetsifikatsioon ja tähised kujutatud joonisel 5.1.
Tabelis 11.2. Plokiratta spetsifikatsioon [1, lk. 19, tabel 20] Dpl, D1, d1, l c, d2,
Ketas ja ribid a, b, Mass, mm mm mm mm mm Ribide n, mm mm kg arv mm 400 460 60 70 120 4 10×12 40 30 23
11.3. Lastikonksu spetsifikatsioon
Tabelis 11.3 on esitatud konksu spetsifikatsioon ja tähised kujutatud joonisel 7.1.
Tabel 11.3. Lastikonksu parameetrid [1, lk 30] (väärtused, millel puudub ühik, pikkusühik mm) Tõstevõime, kN
Mass, kg
a o b h dk d1 d0* l l1** l2 m R R1 R2 R3 R4 R5 R6 R7 R8 29,5 120
115
180
155
120 125 100
90 74
75 70
64
70
90 60 14 84
62
36
20 2
21 11.4. Elektrimootori spetsifikatsioon
Tabelis 11.4 on esitatud elektrimootori tehniline spetsifikatsioon ja tähised kujutatud joonisel
8.1.
Tabel 11.4. Valitud mootori tehniline karakteristik [1, lk. 36, tabel 37] B 15% Suurus Tüüp Võimsus, Pöörete Maksimaalse Hoomoment, Mass, kg kW arv momendi Nm2
minutis kordne 4 MTK-42-8 19,5 667 3,1 26 335
11.5. Reduktori spetsifikatsioon
Tabelis 11.5 on esitatud reduktori spetsifikatsioon.
Tabel 11.5. Reduktori spetsifikatsioon [1, lk. 39, tabel 39] Kiirekäigulise võlli Ülekandearv pöörlemise sagedus, Tööreziim Reduktori tüüp p/min 32,42 1000 keskmine 2-300
11.6. Piduri spetsifikatsioon
Tabelis 11.6 on esitatud valitud elektromagnetpiduri spetsifikatsioon.
Tabel 11.6. Elektromagnetpiduri spetsifikatsioon [1, lk. 47, tabel 48] Pidurmagneti Pindesurve, Paku Tõukuri käik, Piduri tähis Moment 20% Mass, kg N/m2 eemaldumine mm B juures TKT-300 500 1,7×105 0,7 1,0 3,0 4,4 87,8
22 KASUTATUD KIRJANDUS
1. Aarend, E. Kursusetöö aines Tõste- ja edastusmasinad. Tartu, 2012. 89 lk. 2. Morgatsov, V. Tõste-transportmasinad. Moskva, 1964. 336 lk.
23






































































































































Kõik kommentaarid