Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Praktikum 10 - Steineri lause". Need materjalid aitavad sul teemat sügavamalt mõista.
TALLINNA TEHNIKAÜLIKOOL Füüsika kateeder Üliõpilane: Imre Drovtar Teostatud: 30. november 2006 Õpperühm: AAAB-11 Kaitstud: Töö nr. 10 OT STEINERI LAUSE Töö eesmärk: Töövahendid: Kehade inertsimomentide määramine. Trifilaarpendel. katsekehad, ajamõõtja, nihik Steineri lause kontrollimine pöördvõnkumise abil. Skeem: 1. Töö teoreetilised alused Trifilaarpendel on kolme sümmeetriliselt asetatud traadi otsas rippuv ketas (alus). Ülevalt on traadid kinnitatud ketta külge, mis on väiksem kui alumine ketas. Alus võib keerelda ümber oma telje, seejuures raskuskese liigub telje suhtes üles ja alla. Võnkeperioodid on
TALLINNA TEHNIKAÜLIKOOL Füüsika kateeder Üliõpilane: Imre Drovtar Teostatud: 30. november 2006 Õpperühm: AAAB-11 Kaitstud: Töö nr. 10 OT STEINERI LAUSE Töö eesmärk: Töövahendid: Kehade inertsimomentide määramine. Trifilaarpendel. katsekehad, ajamõõtja, nihik Steineri lause kontrollimine pöördvõnkumise abil. Skeem: 1. Töö teoreetilised alused Trifilaarpendel on kolme sümmeetriliselt asetatud traadi otsas rippuv ketas (alus). Ülevalt on traadid kinnitatud ketta külge, mis on väiksem kui alumine ketas. Alus võib keerelda ümber oma telje, seejuures raskuskese liigub telje suhtes üles ja alla. Võnkeperioodid on
TALLINNA TEHNIKAÜLIKOOL Füüsika kateeder Üliõpilane: Teostatud: 30.09.2002.a. Õpperühm: AAAB11 Kaitstud: Töö nr. 10 OT STEINERI LAUSE Töö eesmärk: Töövahendid: Kehade inertsimomentide määramine. Trifilaarpendel. katsekehad, ajamõõtja, nihik Steineri lause kontrollimine pöördvõnkumise abil. 1. Töö teoreetilised alused Trifilaarpendel on kolme sümmeetriliselt asetatud traadi otsas rippuv ketas (alus). Ülevalt on traadid kinnitatud ketta külge, mis on väiksem kui alumine ketas. Alus võib keerelda ümber oma telje, seejuures raskuskese liigub telje suhtes üles ja alla. Võnkeperioodid on määratud aluse inertsimomendiga, mis muutub, kui alust koormata mingi kehaga
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: ....... KOOD: ........ JUHENDAJA: I. Penkov TALLINN 2007 1. Ajami kinemaatiline skeem 2. Trossi valik ja trumli läbimõõdu arvutus Tugevustingimus Maksimaalne pingutusjõud Fmax = m g = 450 * 9,81 4415 N . Varutegur [S] = 5 [6]. Pidades silmas trossi keeramist ainult trumlil (mitte alt olevate trossi keerdude peal) valime tross TEK 21610 [7], mille Ft = 59,5 kN Siis Trossi mõõt d = 10 mm. Siis trumli läbimõõt kus e = 20 Valime D = 200 mm reast 160; 200; 250; 320; 400; 450; 560; 630; 710; 800; 900; 1000 mm 3. Mootorreduktori valik Trumli pöörlemiseks vajalik võimsus kus T pöördemoment, Nm; T - nurkkiirus, rad/s. Pöördemoment kus F - tõstejõud.
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: KOOD: JUHENDAJA: TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MASINATEHNIKA PROJEKT MHE0062 l D v Projekteerida elektriajamiga vints. Tõstetav mass m = 680 kg Maksimaalne liikumiskiirus v = 0,1 m/s Trumli pikkus l = 300 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detaili joonised Joonis esitada formaadil A2 A4 Töö välja antud: 05.02.2010.a.
Gert Saarm EHITUSFÜÜSIKA KODUSED TÖÖD KODUSED TÖÖD Õppeaines: EHITUSFÜÜSIKA Ehitusteaduskond Õpperühm: EI-32 Juhendaja: lektor A. Hamburg Tallinn 2014 SISSEJUHATUS Ehitusfüüsika kodutöö raames toimub etteantud seina-, põranda- ja katuslaetarindi soojusjuhtivuse arvutamine. Ette on antud erinevad näitajad nagu temperatuur, suhteline õhuniiskus, pinnase tüüp ja tarindi materjalid. Lisaks soojusjuhtivuse arvutamisele toimub arvutus ka seinatarindi niiskus- ning temperatuurireziimi osas. Seina soojusjuhtivuse arvutamise ja U arvu teada saamise eesmärgiks on teada kui palju soojust juhib mingi seinatüüp endast läbi
Mikk Kaevats KODUSED ÜLESANDED Harjutusülesanded Õppeaines: EHITUSFÜÜSIKA JA ENERGIATÕHUSUSE ALUSED Ehitusteaduskond Õpperühm: HE 31B Juhendaja: lektor Leena Paap Esitamiskuupäev: 13.11.2017 Üliõpilase allkiri: M. Kaevats Õppejõu allkiri: .................. Tallinn 2017 ÜLESANNE 1 ÜLESANNE 1 Väärtus Ühik Ts 18 °C Tk 30 °C v 0,45 m/s Arvutada operatiivne temperatuur kui ruumi õhu temperatuur on 18 ºC ja kiirgavate pindade keskmine temperatuur on 30 ºC. Õhu liikumiskiirus ruumis on 0,45 m/s.
Nimi ja perekonnanimi EHITUSFÜÜSIKA KODUSED TÖÖD KODUSED TÖÖD Õppeaines: EHITUSFÜÜSIKA Ehitusteaduskond Õpperühm: KEI-32 Juhendaja: lektor Leena Paap Rapla 2013 SISSEJUHATUS Ehitusfüüsika kodutöö raames toimub etteantud seina-, põranda- ja katuslaetarindi soojusjuhtivuse arvutamine. Ette on antud erinevad näitajad nagu temperatuur, suhteline õhuniiskus, pinnase tüüp ja tarindi materjalid. Lisaks soojusjuhtivuse arvutamisele toimub arvutus ka seinatarindi niiskus- ning temperatuurireziimi osas. Seina soojusjuhtivuse arvutamise ja U arvu teada saamise eesmärgiks on teada kui palju soojust juhib mingi seinatüüp endast läbi
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT ELEKTRIAJAMIGA TRUMMELVINTS PROJEKT ÜLIÕPILANE: Kert Kerem KOOD: 082657 JUHENDAJA: Igor Penkov TALLINN 2010 TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT PÕHIÕPPE PROJEKT MHX0020 Projekteerida elektriajamiga vints. Tõstetav mass m = 600 kg Maksimaalne liikumiskiirus v = 0,06 m/s Maksimaalne liikumiskiirus l = 400 mm Mootori ja trumli ühendus kettülekanne Esitada: seletuskiri, mastaabis eskiisid, koostejoonis, detaili joonised Joonis esitada formaadil A2 A4 Töö välja antud: 04.02.2010.a. Esitamise tähtpäev: 20.05.2010.a. Töö väljaandja: I.Penkov 1. Projekteerimise objekt ja lähted Projekteerimiseks on esitatud elektriajamiga vints kandevõimega 600 kg ja maksimaalse
I )V I i l J D FQN- st AAglSae{r.r D t} TL0F$.,x. AALDA',JDM0(]T0)ATS6A DV o v r ( * ) d x "s ( X ) = O ( . ) t-.,-^ u(") rb st) * o,&-d {r-.-r"l.,tv'cor^- cl- . _Nt Jrct++ .i q=o JSSf a!-hl v-t As&.rpsl,$.Bt (.rfn,t")a* -!ffln,= J6q-+^s I Nodor^rr r e ("r) o,w l,) l.,o-t.,q4d^L-" = (r) ro-tq^'d a o.- t(') M x )d r + l . l ( 1 ( * ) ) d f u = _ 9=++ t "O t) ! x g'(x& (rt t' t u(,itxt)1'(u)) .tu =e
Kuidas leida vektorite skalaar- ja vektorkorrutis? Graafiline liitmine: Kolmnurga reegel – eelmise vektori lõpp-punkti pannakse uue vektori algpunkt. Vektorite liitmisel tuleb aevestada suundasid. Saab kuitahes palju vektoreid kokku liita. Rööpküliku reegel – vektorite alguspunkt paigutatakse nii, et nende alguspunktid ühtivad. Saab ainult kahte vektorit kokku liita. ax – x-telje projektsioon ay – y-telje projektsioon az – z-telje projektsioon i, j, k – vektori komponendid ⃗a + b⃗ =i⃗ ( a x + bx ) + ⃗j ( a y +b y ) + ⃗k (a z +b z ) Skalaarkorrutis: ⃗a ∙ ⃗b=|⃗a||b⃗| cosα=a x b x +a j b j +a z b z Kui suudame ära näidata, et vektorid on risti, siis võime öelda, et skalaarkorrutis on 0. ⃗ ⃗ Vektorkorrutis: |a⃗ × b|=¿ ⃗a∨∙∨b∨sinα Vektorid on võrdsed, kui suund ja siht on sama. Samasihilised võivad olla erisuunalised. 2. Mis on taustsüsteem, kohavektor, nihkevektor? Kuidas nad on
2018 Abimaterjal aines „Ehitusfüüsika“ Veeauru küllastusrõhk, psat, Pa 25 3300 Veeaurusisaldus õhus, g/m3 17 ,269t psat 610,5 e 237,3 t , Pa, kui t 0 o C , 20 2640 Veeaururõhk, Pa 21,875t
1. Punktmassi kinemaatika. 1.1 Kulgliikumine 1.2 Vaba langemine 1.3 Kõverjooneline liikumine 1.4a Horisontaalselt visatud keha liikumine 1.4b Kaldu horisondiga visatud keha liikumine. 2. Pöördliikumine 2.1 Ühtlase pöördliikumisega seotud mõisted 2.2 Kiirendus ühtlasel pöördliikumisel 2.3 Mitteühtlane pöördliikumine. Nurkkiirendus 2.4 Pöördenurga, nurkkiiruse ja nurkkiirenduse vektorid. 3. Punktmassi dünaamika 3.1. Inerts. Newtoni I seadus. Mass. Tihedus. 3.2 Jõu mõiste. Newtoni II ja III seadus 3.3 Inertsijõud 4. Jõudude liigid 4.1 Gravitatsioonijõud 4.1a Esimene kosmiline kiirus. 4.2 Hõõrdejõud 4.2a Keha kaldpinnal püsimise tingimus. 4.2b Liikumine kurvidel 4.3 Elastsusjõud 4.3a Keha kaal 5 JÄÄVUSSEADUSED 5.1 Impulss 5.1a Impulsi jäävuse seadus. 5.1b Masskeskme liikumise teoreem 5.1c Reaktiivliikumine (iseseisvalt) 5.2 Töö, võimsus, kasutegur 5.3 Energia, selle liigid 5
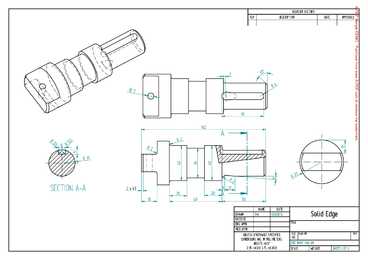
A-PDF Merger DEMO : Purchase from www.A-PDF.com to remove the watermark REVISION HISTORY REV DESCRIPTION DATE APPROVED 2 45 ° R4 O7 48 142 A
Sissejuhatus Erinevad ühikud rad rad 1 2 = 1Hz 1 = Hz s s 2 Vektorid r F - vektor r F ja F - vektori moodul Fx - vektori projektsioon mingile suunale, võib olla pos / neg. r Fx = F cos Vektor ristkoordinaadistikus Ükskõik millist vektorit võib esitada tema projektsioonide summana: r r r r F = Fx i + Fy j + Fz k , millest vektori moodul: F = Fx2 + Fy2 + Fz2 Kinemaatika Kiirus Keskmine kiirus Kiirus on raadiusvektori esimene tuletis aja t2 järgi. s v dt s v = - võimalik leida ühtlase liikumise kiirust vk = = t1 t t t
LABORATOORSED TÖÖD LABORATOORNE TÖÖ Õppeaines: FÜÜSIKA I Tehnikainstituut Õpperühm: Juhendaja: Esitamiskuupäev:.................. Üliõpilase allkiri:.................. Õppejõu allkiri:.................... Tallinn 2017 SISUKORD 1.1Tööülesanne.....................................................................................................................................5 1.2Töövahendid....................................................................................................................................5 1.3Töö teoreetilised alused...................................................................................................................5 1.4Töö käik...............
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega. Näiteülesandeid d'Alembert'i printsiibi kohta võib lugeda ka E. Topnik' u õpikus ,,Insenerimehaanika
!"# $ %%& ' "(()* ++$,+-. %% /"%% %%$ 0 Katseandmete tabel Pöördliikumise dünaamika põhiseaduse kontroll. D = ......... ± ......... cm, no = ......... ± ......... cm, n1 = ......... ± ......... cm. Katse Mass Langemise aeg t, s nr. m, kg t1 t2 t3 t4 t5 t 1. 2. 3. 4. Katse Mass Skaala näit n2, cm nr. m, kg n21 n22 n23 n24 n25 n2 1. 2. 3. 4. h = no n1 = ......... ......... = ......... cm. h11 = no n 21 = ......... ......... = ......... cm. h12 = no n 22 = ......... ......... = ......... cm. h13 = no n 23 = ......... ......... = ......... cm. h14 = no n 24 = ......... ......... = ......... cm.
TALLINNA TEHNIKAÜLIKOOL Elektroenergeetika instituut ALAJAAMAD II AEK3025 5,0 AP 6 4-1-1 E K (eeldusaine AES3045 "Elektrivõrgud") TALLINN Loengukursus AEK 3025 ii Rein Oidram _____________________________________________________________________ 2009 ______________________________________________________________________ TTÜ elektroenergeetika instituut Kõrgepingetehnika õppetool Loengukursus AEK 3025 iii Rein Oidram _____________________________________________________________________ SISUKORD 1. Sissejuhatus 2. Alajaama struktuur ja side elektrivõrguga 2.1. Alajaama põhitüübid ja seadmete üldiseloomustus 2.2. Alajaamade talitlustingimused 2
SS.r-i jl i i I i I o ?We0;/^, a-- c-!--*Lo- clon'u!.*0A*n w+*n,*.*.-- " 0 o U0.+U^^- *f^r** /Lp^-,^-;* ^rE^J" U"^!rc-A^/-o- tpt^^,t t- kZzy"a- t^"M^h-r"^' G,tt- y,n**t-aoJ*t bqt'^'&o^---"^t 9 Nt"-"&a^- ".-&J t/^o'14^-^4^4y" Irrnqrlrr'ta!. 0"X^ !Ul^t- wta,Lt*ua*U,v(, g ^ ao -/" U i r/oh-{L la r#a^o!"nd;*. al--& Vou^e..^.!r}nr-),- *.b- N*tAtr"k ,/^o,fur.iaL fv[ nlto^ d, oc< cl'*r,Q'a* .
LIIKUMISHULK JA JÕUIMPULSS 45. Pall massiga 0.40 kg visatakse vastu kiviseina, nii et ta liigub horisontaalselt edasi- tagasi. Tema kiirus enne põrget on 30 m/s ja pärast põrget 20 m/s. Leida liikumishulga muut ja keskmine jõud, mida sein avaldab pallile, kui põrge kestab 0.010 s. Lahendus: Joonis. Palli mass m = 0,4 kg Palli kiirus enne põrget v1= -30 m/s Palli kiirus pärast põrget v2= 20 m/s Põrke kestvus t = 0,010 s Liikumishulk e. impulss (vektor) ⃗ ⃗ ⃗ 0,4 30 / = 2 / ⃗ 0,4 20 8 / Liikumishulga muut avaldub ⃗⃗⃗⃗⃗⃗ ⃗ ⃗ 8 2 / Keskmise jõu leiame järgmiselt ⃗⃗⃗⃗⃗⃗ /
Analüüsitava mootori algandmed: B & W K90 GF Silindri võimsus Ns = 2300 kW Pöörete arv n = 110 p/min; silindri diameeter 0,9 m; kolvikäik S = 1,8 m Surveaste = 13,5 Turbokompressori filtrite rõhulangus pf = 392 Pa Rõhulangus õhujahutil põj = 1962 Pa (põj = 980...2900 Pa) Välisõhu rõhk p0 = 1,013·105 Pa Masinaruumi temperatuur 20 oC, õhu suhteline niiskus 0 = 70 % Merevee temperatuur 14 0C NB !!! Kõik ülejäänud vajalikud algandmed võib valida antud mootori tüübile lubatud piirides. Ülesanne 1 Mootor töötab raskekütusel kütteväärtusega Qa = 41 418 kJ/kg. Leida, kuidas muutuvad energeetilised ja ökonoomilised näitajad, kui mootorit ekspluateeritakse madalama kütteväärtusega kütusel Qa = 40 287 kJ/kg. Diiselmootori tööd saab hinnata järgmiste näitajate alusel: 1. Indikaatornäitajad - keskmine indikaatorrõhk - mootori indikaatorvõimsus
c ' ,t-r,(r l t,{ -' i == 9,tt KONTROL LTO{) nr. b N;,";, ...T."..S-cg.ff x,,,"ur, .....F.t].-n... VONKUMISFi ja LAINED 05. detsernber2005 / . .. l.1. Harmoonj ,eit ionk va punkti v6nke[lnplitrrud orr 8 cm, nurksagedu,s 4 s-1, alffaas
c ' ,t-r,(r l t,{ -' i == 9,tt KONTROL LTO{) nr. b N;,";, ...T."..S-cg.ff x,,,"ur, .....F.t].-n... VONKUMISFi ja LAINED 05. detsernber2005 / . .. l.1. Harmoonj ,eit ionk va punkti v6nke[lnplitrrud orr 8 cm, nurksagedu,s 4 s-1, alffaas
TARTU ÜLIKOOL Füüsikalise Keemia Instituut Erika Jüriado, Lembi Tamm ÜLDKEEMIA PÕHIMÕISTEID JA NÄITÜLESANDEID Tartu 2003 SISUKORD I. Keemiline kineetika ja keemiline tasakaal. . . . . . . . . . . . . . . . . . . . . . II. Lahused. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . III. Tasakaalud elektrolüütide lahustes. . . . . . . . . . . . . . . . . . . . . . . . . . . IV Soolade hüdrolüüs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . V. Redoksreaktsioonid. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VI. Metallide aktiivsus ja korrosioon. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 I
TARTU ÜLIKOOL Tartu Ülikooli Teaduskool Veaarvutus ja määramatus Urmo Visk Tartu 2005 Sisukord 1 Tähistused 2 2 Sissejuhatus 3 3 Viga 4 3.1 Mõõteriistade vead . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3.2 Tehted vigadega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3.3 Näide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 3.4 Skinneri konstandi viga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 4 Määramatus 10
v1/v2=p1/p2. Isotermiline protsess 2.SEADUS (Gay- Lussaci sedaus): kui gaasi oleku muutus toimub isobaarselt (p=const), siis erimahud sõltuvad võrdeliselt absoluutse temperatuuridega. v1/v2=T1/T2 3. SEADUS (Charlsi seadus): V=const, siis p1/p2=T1/T2 (isohoorne) Ideaalse gaasi olekuvõrrandid Termodünaamilise keha termiliseks oleku- ehk karaktervõrrandiks nim. võrrandit, mis seob omavahel termodünaamilises tasakaalus oleva süsteemi termilised olekuparameetrid. 1. Ideaalsete 2 mw 2 gaaside olekuvõrrand on tuletatav molekulaar-kineetilise teooria põhivalemist p n , kus 3 2 n- molekulide arv mahuühikus, m- gaasimolekuli mass, ŵ2- gaasimolekuli ruutkeskmine kiirus, p- rõhk. 2. Teiseks ideaalse gaasi molekulaarkineetilise teooria võrrandiks, mis seob gaasimolekuli
Kiirus Puntki asukoha ruumis määrab raadiusvektor r. Aja ja raadiusvektori juurdekasvu abil saame r moodustada suhte . Antud juhul sõltuvad vektori moodul ja suund ajavahemiku t t suurusest.. Kui seda vähendada, siis väheneb ka r. St et t nullile lähenemisel nullile läheneb antud suhe teatud piirväärtusele, mida nimetatakse liikumise kiiruseks- r dr v = lim . Kiirust võib määrata ka raadiusvektori tuletisena aja järgi- v = . Kiirus on t 0 t dt vektoriline suurus. Teelõik s on üldjuhul erinev suuruse poolest nihke moodulist r . Kui aga vaadelda väikestele ajavahemikele t vastavaid teelõike s , siis teelõik ja nihke r s ds
TEHNILINE TERMODÜNAAMIKA SISSEJUHATUS Termodünaamika on teadus energiate vastastikustest seostest ja muundumistest, kus üheks komponendiks on soojus. Tehniline termodünaamika on eelmainitu alaliigiks, mis uurib soojuse ja mehaanilise töö vastastikuseid seoseid. Tehniline termodünaamika annab alused soojustehniliste seadmete ja aparaatide (näiteks katelseadmete, gaasiturbiinide, sisepõlemismootorite, kompressorite, reaktiivmootorite, soojusvahetusseadmete, kuivatite jne.) arvutamiseks ja projekteerimiseks.
1. 1. N n . , m k . N = 20, n = 5, m = 4, k = 2. . . C nk C Nm--nk C 52 C152 5!15!4!16! 5 4 3 15 14 4 P ( A) = = = = = 0,217 . CN m C 204 2!3!2!13!20! 2 20 19 18 17 2. n , k . , m . n = 10, k = 4, m = 2. . . C km C 42 4!2!8! 43 2 P ( A) = m = 2 = = = = 0,133 . Cn C10 2!2!10! 10 9 15 3. . 15% , 25%, 30%. , ( ) . . : A1 ; A2 ; A3 . , ( ) P ( A) = P ( A1 A2 A3 + A1 A2 A3 + A1 A2 A3 ) = = P( A1 A2 A3 ) + P( A1 A2 A3 ) + P ( A1 A2 A3 ) = = P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) =
Haridus- ja Teadusministeerium Võrumaa Kutsehariduskeskus Puidutehnoloogia PTo-07 Andres Kooser Praktiline töö Vineeri tootmine Juhendaja: Taivo Tering Väimela 2010 1 Vineeri tootmine. Metoodiline juhend praktiliste tööde teostamiseks. Vineer kujutab endast treispoonilehtede kokkuliimimisel saadud kihilist materjali. Sõltuvalt kasutatavast liimi tüübist jagatakse vineer kahte gruppi: a) fenoolformaldehüüdliimide baasil valmistatud kõrgendatud veekindlusega vineer. b) karbamiidformaldehüüdliimide baasil valmistatud keskmise veekindlusega vineer. Käesolevas praktiliste tööde juhendis on toodud vineeri valmistamise tehnoloogiliste
#D#i#m#i#t#r#i# #K#l#e#n#s#k#i#,# #J#u#r#i# #}#u#r#a#v#l#j#o#v#,# #T#a#i#r#a# #A#a#s#a#,# #M##r#t# ##i#g#u#s#,# #I#n#d#r#e#k# #T#a#r#a#n#d# #j#a# #M#a#r#t#i#n# #H#e#l#m#e#.# # # # # #E#E#S#T#I# #R#E#F#O#R#M#I#E#R#A#K#O#N#D# # # #1#.#U#r#m#a#s# #p#a#e#t# # # # # # #s#e#i#s#u#k#o#h#t#:# ## M#e#i#e# #e#e#s#m##rgiks on majanduslikult edukas ja turvaline Euroopa, kus inimestel on hea elada ja lapsi snnitada. Sellises Euroopas soovin ma elada. 2.Laine Jnes seisukoht: Usun, et omandatud kogemused Eestis aitaksid mul viia Eesti kultuuri Euroopasse ja tuua Euroopa kultuuri Eestisse. Miks see nii thtis on? Sest kultuur on ainus jrjepideva arengu tagaja rahva sda ja sdamehl. Tagatis, et Eesti elab ja kestab. Eesti viks olla Euroopa kultuuririik ja mitte ainult hel aastal, vaid kogu aeg. 3.Raivo Jrvi seisukoht: "Arvestades meie olukorda Euroopa Liidu piiririigina ja Venemaa ettearvamatut kitumist kiirelt muutuvas maailmas, on eluthtis eriti EL
Elektroonika Loengute materjalid: skeemid, diagrammid, teesid. 1 Sisukord 1. Elektroonika ajaloost (arengu etapid, elektroonika osad, elektronlambid, elektronkiiretoru, elektronseadmete montaazi tüübid)............................................................................................... 3 2. Elektroonika passiivsed komponendid.......................................................................................... 14 3. Pooljuhtseadised (dioodid, bipolaartransistorid, väljatransistorid, türistorid)............................... 23 4. Optoelektroonika elemendid, infoesitusseadmed.......................................................................... 42 5. Analoogelektroonika lülitused....................................................................................................... 60 5.1