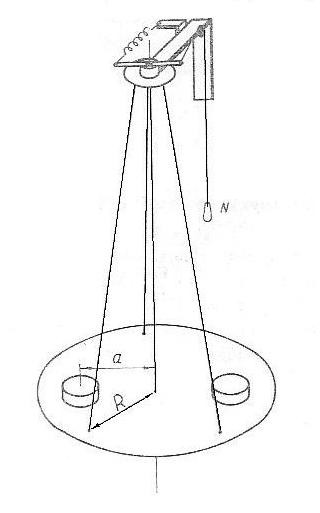
TALLINNA TEHNIKAÜLIKOOL Füüsika kateeder Üliõpilane: Imre Drovtar Teostatud: 30. november 2006 Õpperühm: AAAB-11 Kaitstud: Töö nr. 10 OT STEINERI LAUSE Töö eesmärk: Töövahendid: Kehade inertsimomentide määramine. Trifilaarpendel. katsekehad, ajamõõtja, nihik Steineri lause kontrollimine pöördvõnkumise abil. Skeem: 1. Töö teoreetilised alused Trifilaarpendel on kolme sümmeetriliselt asetatud traadi otsas rippuv ketas (alus). Ülevalt on traadid kinnitatud ketta külge, mis on väiksem kui alumine ketas. Alus võib keerelda ümber oma telje, seejuures raskuskese liigub telje suhtes üles ja alla. Võnkeperioodid on määratud aluse inertsimomendiga, mis muutub, kui alust koormata mingi kehaga. Seda
TALLINNA TEHNIKAÜLIKOOL Füüsika kateeder Üliõpilane: Teostatud: 30.09.2002.a. Õpperühm: AAAB11 Kaitstud: Töö nr. 10 OT STEINERI LAUSE Töö eesmärk: Töövahendid: Kehade inertsimomentide määramine. Trifilaarpendel. katsekehad, ajamõõtja, nihik Steineri lause kontrollimine pöördvõnkumise abil. 1. Töö teoreetilised alused Trifilaarpendel on kolme sümmeetriliselt asetatud traadi otsas rippuv ketas (alus). Ülevalt on traadid kinnitatud ketta külge, mis on väiksem kui alumine ketas. Alus võib keerelda ümber oma telje, seejuures raskuskese liigub telje suhtes üles ja alla. Võnkeperioodid on määratud aluse inertsimomendiga, mis muutub, kui alust koormata mingi kehaga. Seda asjaolu kasutamegi selles töös
MHE0041 MASINAELEMENDID I Kodutöö nr. 3 Variant nr. Töö nimetus: Keevisliited A-2 B-9 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: 112592 MATB32 Igor Penkov Töö esitatud: Töö parandada: Arvestatud: Ülesanne : Projekteerida teabetahvli aluspost. Arvutada posti ja alusplaadi keevitusühendus. Konstruktsiooni kõrgus l = 7,0 m Tahvli kõrgus h = 2,0 m Tahvli laius b = 3,0 m Tahvli mass mT = 550 kg Paigaldamisala linnaväline maastik 1. Tuulejõu määramine Tuulejõud määratakse avaldisest [1] Fw = q ref ce ( z )c f Aref c d (1) 2 kus qref keskm
22) lihtsustub kujule d M = I = I , (6.23) dt kus on keha nurkkiirenduse vektor. Kulgliikumisel on selle valemi analoogiks Newtoni II seadus konstantse massiga keha jaoks, valem (3.6). Valem (6.22) esitab pöördliikumise dünaamika põhiseadust, mis on ühtlasi Newtoni teise seaduse analoog pöördliikumisel. Selle erijuht jääva inertsimomendi korral on (6.23). 6.6 Steineri lause Vaba keha pöörleb alati ümber oma masskeset läbiva telje. Tähistame tema inertsimomendi selle telje suhtes I C . Steineri lause lubab arvutada selle keha inertsimomendi ka mingi teise telje suhtes. a C Tähistame keha masskeskme tähega C . Olgu keha mass m. Tema inertsimoment masskeset läbiva telje suhtes avaldub n I C = mi ri 2
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega. Näiteülesandeid d'Alembert'i printsiibi kohta võib lugeda ka E. Topnik' u õpikus ,,Insenerimehaanika ülesannetest IV. Analüütiline mehaanika", Tallinn 1999, näited 14-17, leheküljed 39-49. Kõikides variantides xy-tasapind on horisontaalne, xz- ja yz-tasapinnad aga on vertikaalsed. Andmetes toodud suurused 0 ja 0 on vastavalt pöördenurga ja
RASKUSKIIRENDUS. 1. Tööülesanne. Maa raskuskiirenduse määramine. 2. Töövahendid. Pendlid, sekundimõõtjad, mõõtelint. 3. Töö teoreetilised alused. Tahket keha, mis on kinnitatud raskuskeskmest kõrgemal asuvast punktist ja võib raskusjõu mõjul vabalt võnkuda seda punkti läbiva telje ümber nimetatakse füüsikaliseks pendliks. Idealiseeritud süsteemi, kus masspunkt võngub lõpmatult venimatu ja kaaluta niidi otsas, nimetatakse matemaatiliseks pendliks. Matemaatilise pendli vnkeperiood T avaldub järgmiselt: kus l - pendli pikkus, g - raskuskiirendus. Valem kehtib ainult väikeste vonkeamplituudide korral,kui vonkumist voib lugeda harmooniliseks.Matemaatilise pendlina kasutame antud töös peenikese ja kerge niidi otsa kinnitatud kuulikest (joonis A). Füüsikalise pendli (joonis B) võnkeperiood T on arvutatav valemiga: kus I on pendli inertsmoment pöörlemistelje suhtes, a - masskeskme kaugus pöörlemistelje
JÕUPAARI MOMENT. / F1/ = / F2 / = F M = F l2 F l1 = F (l2 l1) = F l M=Fl IMPULSSMOMENT. L=[rp]=m[rv] r - impulssi õlg p - jõuimpulss dL /dt = M 16 Steineri lause: Inertsmoment ( I ) mingi suvaliselt valitud telje suhtes võrdub summaga , milles üheks liidetavaks on inertsimoment ( I ) telje suhtes, mis on paralleelne antud teljega ning läbib keha inertsikeset (ras- kuskeset ) ja teiseks liidetavaks on keha massi ( m ) korrutis telgede va- helise kauguse ( l ) ruuduga. I = I + ml2 Pöördliikumise dünaamika põhivõrrand. Mz = Iz Moment telje z suhtes võrdub keha inertsmomendi ( I ) ja nurkkiirenduse
Pöördliikumise dünaamika kontroll D = 40,00 ± 0,05 mm , n0 = 144,0 ± 0,5 cm , n1 = 33,0 ± 0,5 cm , m a = 61,40 ± 0,05 g Katse Mass Langemise aeg t , s Skaalanäit n2 , cm nr. m, g t1 t2 t3 t4 t5 t n 21 n 22 n 23 n 24 n 25 n2 1 156,5 9,78 9,75 9,77 9,73 9,73 9,752 47 48,5 47,5 47,5 49 47,9 0 2 200,3 8,68 8,67 8,69 8,70 8,71 8,690 46,5 46 47 46 45,5 46,2 0 3 295,2 7,36 7,34 7,35 7,36 7,37 7,356 45,5 45,5 46 46 45,5 45,7 0 4 326,2 7,00 7,02 7,01 6,96 6,95 6,988 45 45 44,5 45 45 44,9 5 m1 = 61,40 ± 0,05 + 95,10 ± 0,05 = 156,50 ± 0,10 g m2 = 61,40 ± 0,05 + 95,10 ± 0,05 + 43,80 ± 0,05 = 200,30 ± 0,15 g m3 = 61,40 ± 0,05 + 95,10 ±























Kõik kommentaarid