Kas funktsionaalstrateegia kuulub: juhtimistasandite strateegiate hulka Kas 2-5 aastat periood sobiks: tehnoloogiasiirdele Kas aastail 1955-1985 oli tööstuse arengu põhiliseks tõukejõuks: Turu-globaliseerumine Kas koosteprotsesside automatiseerimine võiks kuuluda: Võtmetehnoloogiate hulka Kas tuntud S-kõvera aluseks on Loodusseadused Milline loetelust kuulub innovatsiooni kategooriasse? tehnilise avastuse rakendamine Kui palju kulutavad Euroopa ja USA firmad oma kogukäibest teadus- ja arendustöödele? 7.5% Miks kadus kuulus lennukitootja Fokker? vahendite killustamine mitme tootearendusprojekti vahel Kui suur on keskmine masinaehitustoote eluiga? 3-4 aastat Kui palju peab tootes leiduma uut, et seda kokkuleppeliselt lugeda täiesti uute toodete hulka? 70% Kas kriitilisse tsooni tootearenduses satutakse kui toote müügiiga on väiksem tootearendusajast Milline leiutaja tüüp on tootearenduses reeglina kasutu? Professi...
Integreeritud tootearendus Moodul 2 töö vastused 1. Kui palju peab tootes leiduma uut, et seda kokkuleppeliselt lugeda täiesti uute toodete hulka?70% 2. Kas odavtootmisele orienteeritud firma: panustab tootmise täiustamise projektidele? 3. Kui suur on keskmine masinaehitustoote eluiga?3-4 aastat 4. Kui palju kulutavad Euroopa ja USA firmad oma kogukäibest teadus- ja arendustöödele? 7,5% 5. Millisel juhul Te investeeriksite tootearendusse?toote konkurentsivõime on üle keskmise ja tehnoloogia osatähtsus selles alla keskmise 6. Kas kriitilisse tsooni tootearenduses satutakse:kui toote müügiiga on väiksem tootearendusajast 7. Kas 2-5 aastat periood sobiks:Tehnoloogiasiirdele 8. Milline leiutaja tüüp on tootearenduses reeglina kasutu?professionaalne 9. Mis ei sobi büroomasinate turusegmendiks: Administratsioon 10. Kas tuntud S-kõvera aluseks on:Loodusseadused 11. Milline loetelust ei kuulu innovatsioonikultuuri juurde?tootearenduse kiirus 12...
1. Mida nimetatakse jõumomendiks? Jõumomendiks nimetatakse jõu ja jõu õla korrutist. 2. Kuidas määratakse jõumomendi suund? pöördenurga vektor on vektor, mille moodul võrdub pöördenurgaga ja mille suund antakse piki pöörlemistelge nii, et keha pöördumisel ümber telje kehtiks "parema käe kruvireegel": Kui keha pöörlemissuund võtta tavalise (parempoolse vindiga) kruvi pöördumissuunaks, siis ühtib kruvi liikumissuund pöördenurga vektori suunaga. 3. Millised jõud on ekvivalentsed? Njuutonmeeter (Nm) on jõumoment (pöördemoment), mis on ekvivalentne ühenjuutonilise jõu poolt tekitatava momendiga, kui jõu õla pikkus on üks meeter. 4. Millised jõud moodustavad jõupaari? Jõupaar moodustub kahest vastassuunalisest, kuid piki erinevaid sirgeid mõjuvast jõust. 5. Defineerige ainepunkti ja keha inertsimoment. Ainepunkt=massikese, ainepunkti inertsmoment 6. Kuidas sõltub inertsimo...
1.Mis on füüsika üldmudelid? Too näiteid. (veebiõpik 3.1.1); (76) Selliseid mudeleid, mis on kasutatavad kogu füüsikas, nimetatakse füüsika üldmudeliteks. (Füüsika üldmudeliks on näiteks keha. Rääkides füüsikalistest kehadest, peame silmas ükskõik mida, millel on kindlad piirjooned, mõõtmed ja mass. Füüsikaline keha võib olla õun, auto, inimkeha või terve planeet Maa.) 2.Füüsikalised objektid. Näited. (3.1.2); (77) Füüsikaline objekt on kas keha, väli või loodusnähtus, mis eksisteerib looduses sõltumatult vaatlejast ja tema teadmistest objekti kohta. 3. Üldmudelid: keha, punktmass, rõhk, pindala. objektid: vastastikmõju, väli. suurused: liikumisolek (?), jõud, pikkus, kiirus, liikumisoleku muutumine, kiirendus. 4.Mille poolest erinevad skalaarsed ja vektoriaalsed suurused? Nimeta neid. (3.1.3); (80) Füüsikalist suurust, mis on esitatav vaid ühe mõõtarvu ja mõõtühikuga, nimetatakse skalaarseks suuruseks. Skalaarsetel suurustel on arvulin...
Moodul 2-3 test https://moodle.e-ope.ee/mod/quiz/review.php?attempt=466806&showall=1 Õpikeskkonna avalehele Minu kursused MES0040 Teema 3 Moodul 2-3 test Alustatud neljapäev, 4. oktoober 2012, 11:20 Lõpetatud neljapäev, 4. oktoober 2012, 11:30 Aega kulus 10 minutit 1 sekund Hinne 100,0 maksimumist 100,0 Tagasiside Super! Küsimus 1 Kas võimenduslülide järjestiklülitusel tuleb Õige Hinne 10,0 / 10,0 Vali ük...
TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Telekommunikatsiooni mõõtesüsteemid IRO0030 ARUANNE Siduanalüsaator Täitja(d) Jekaterina Brõtsejeva 083933IATB Juhendaja Ivo Müürsepp Töö tehtud 09.04.2012 (kuupäev) Aruanne esitatud ............................................... (kuupäev) Aruanne tagastatud ............................................ (kuupäev) Aruanne kaitstud .............................................. (kuupäev) ...................................... ...
Kompleksarvud Kompleksarvu mõiste: Arve kujul a+ib, kus a ja b on reaalarvud ja i on imaginaarühik, nimetatakse kompleksarvudeks. Kõikide kompleksarvude hulka tähistatakse sümboliga C Kaks kompleksarvu on võrdsed parajasti siis, kui nende imaginaarosad ja reaalosad on vastavalt võrdsed a + bi = c + di <=> a = c ja b = d Kompleksarve a + bi ja a - bi nimetatakse kaaskompleksarvudeks. Näiteks 5+2i ja 5-2i. Kompleksarvu a + bi vastandarvuks nimetatakse kompleksarvu -a bi. Näiteks 7+5i ja -7- 5i. Tehted kompleksarvudega: (a + bi) + (c + di) = (a + c) + (b + d)i (5 -3i)+(2 + 7i) = (5+2) + (-3+7)i = 7 + 4i (a + bi) - (c + di) = (a - c) + (b d)i (5-3i)-(2+7i) = (5-2) +(-3-7)i = 3 - 10i (a + bi)(c + di) = (ac - bd) + (ad + bc)i (5-3i)(2+7i) = (52 - (-3)7) + (57 +(-...
Pöördliikumine 2.1 Ühtlase pöördliikumisega seotud mõisted Vaatleme esmalt ühtlast pöördliikumist pöörleva ratta näitel, millel tähistame kaks punkti punkt A1 kaugusel r1 ja punkt A2 kaugusel r2 pöörlemisteljest. Ratta pöörlemisel läbib punkt A2 ilmselt pikema teepikkuse s 2 kui punkt A1 , mille läbitud teepikkus olgu s1 . r2 v2 s2 r1 v1 s1 O Järelikult pole erinevalt kulgliikumisest pöördliikumise korral mõtet rääkida teepikkusest, kuna erinevad keha punktid läbivad erinevad teepikkused. Jooniselt on näha, et läbitud teepikkused s on võrdelised kaugustega r pöörlemisteljest. Suhet s ...
Mehaanika uurib kehade liikumist, paigalseisu ruumis, liikumise muutumist mõjude tagajärjel. Mehaanika jaguneb 1)Kinemaatika 2)Dünaamika 3) Staatika Liikumine on 1) keha asukoha muutmine ruumis aja jooksul 2)pidev ajas ja ruumis 3) pidev ajas 4) pidev ruumis ei tähenda, et keha läbib trajektoori kõik punktid. Punktmass keha, mille mõõtmed võib jätta arvestamatta. Trajektoor - joon, mida mõõda keha liigub. Aeg: vaadeldakse absoluutselt: voolab pidevalt, alati ühte moodi, pole algust ega lõppu. Taustsüsteem koosneb: 1)Taustkeha ( seotud kordinaadistik ja ajamääramise süsteem) 2)kordinaadistik (moodustavad mõõtmissuunad,-ühikud ja eeskirjad) 3)Aja mõõtmise süsteem. (alghetk ja mõõteühik). ). Kehade vastastikmõjuks nim. Nähtus kus ühe kehaga juhtub midagi teise keha mõjul. Avaldub jõuna, 2 erinevat tagajärge :1)keha kiiruse muutumine 2) Keha kuju muutumine. Gravitatsioon , Maa külgetõmme on üks gravitatsioonilisi vastastikmõju väljendus....
Moodul 6 (pneumaatika ja hüdraulika) https://moodle.e-ope.ee/mod/quiz/review.php?attempt=481592&showall=1 Õpikeskkonna avalehele Minu kursused MES0040 Teema 4 Moodul 6 (pneumaatika ja hüdraulika) Alustatud neljapäev, 18. oktoober 2012, 12:09 Lõpetatud neljapäev, 18. oktoober 2012, 12:12 Aega kulus 3 minutit 3 sekundit Hinne 100 maksimumist 100 Küsimus 1 Kas PLC (programmeeritava loogikakontrolleri) Õige kasutuselevõtt aitab: Hinne 10 / 10 ...
TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Telekommunikatsiooni mõõtesüsteemide IRO0030 laboratoorse töö ,,Siduanalüsaator" ARUANNE Täitjad: xxx yyy Juhendaja: Ivo Müürsepp Töö tehtud: 09.2011 Aruanne esitatud ............................................... (kuupäev) Aruanne tagastatud ............................................ (kuupäev) Aruanne kaitstud .............................................. (kuupäev) ...................................... (juhendaja allkiri) Tallinn 2012 Töö eesmärk: Õppida tundma siduanalüsaator...
Jõudude liigid 4.1 Gravitatsioonijõud Ülemaailmne gravitatsiooniseadus. Kõik kehad mõjutavad teineteist tõmbejõududega, mis on võrdelised nende kehade massidega ja pöördvõrdelised kehade vahekauguste ruutudega. Kahe punktmassi vahel mõjuva gravitatsioonijõu moodul avaldub valemist Gm1 m2 Fg = . (4.1) r2 Siin m1 ja m 2 on vaadeldavate punktmasside massid, r nendevaheline kaugus ja G gravitatsioonikonstant, mille arvuline väärtus on N m2 m3 G = 6,69 10 -11 = 6,69 10 -11 . kg 2 kg s 2 Gravitatsioonikonstant võrdub arvuliselt jõuga, millega tõmbuvad teineteise poole kaks teineteisest ühe meetri kaugusel paiknevat ühekilogrammilist punktmassi. Märkus. Kui kehad ei ole punktmassid, siis valemit (4.1) võib nende suhte...
Masinamehaanika kordamisküsimused 2010 1. Tuua näiteid kinemaatilistest paaridest ja nende sidemetest. Mehhanismi lülid seotakse omavahel nii, et neil säilub võimalus teineteise suhtes liikuda. Lülide suhtelist liikumist võimaldavaid ühendeid nim kinemaatilisteks paarideks. 1) Kerapaar on kolm sõltumatut rotatsioni ümber kolme telje. Vabadusastmeid on 3, sidemeid 3. 2) Silinderpaar translatsioon piki ühte telge ja sellest sõltumatu rotatsioon ümber sama telje. Vabadusastmeid 2, sidemeid 4. 3) Sõrmega kerapaar kaks sõltumatut rotatsiooni ümber kahe ristuva telje. Vabadusastmeid 2, sidemeid 4. 4) Transaltsioonipaar Translatsioon piki telge. Vabadusasmeid 1, sidemeid 5. 5) Rotatsioonipaar rotatsioon ümber ühe telje. Vabadusastmeid 1, sidemeid 5. 6) Kruv...
Küsimused sissejuhatus erialasse kohta 1. Milline on tähise MK13-TE1 tähendus? MK on müügikorraldus, 13 on õpingute alustamise aasta, T on tsükli või töökohapõhine, E tähendab eestikeelset õpet, 1 rühma nr. 2. Kuidas on Teko direktori nimi? Direktori nimi on Meeli Kaldma 3. Kuidas on kaubandusvaldkonna juhtivõpetaja nimi? Kaubandusvaldkonna juhtivõpetaja nimi on Aive Antson 4. Mis on teie õppekava nimi ja nr? MÜÜGIKORRALDUS, kood 81313. 5. Mitu tundi on 1 ÕN (õppenädal) ? 1ÕN sisaldab 40 õppetundi 6. Mitu ÕN (õppenädalat) on Sinu õpitava kursuse ainemaht kokku? õppekava maht keskhariduse baasil on kaks õppeaastat 80 õppenädalat 7. Mida tähendab moodul? Müügikorralduse õppekava moodul on õppekava terviklik, eesmärgile orienteeritud ja hinnatav sisuline ühik, mis koosneb õppeainetest või nende osadest või erandjuhul ühest õppeainest. 8. Mida tähendab töökohapõhine õpe? Et ...
6 PÖÖRDLIIKUMISE DÜNAAMIKA 6.1 Jõumoment Meenutame kangi tasakaalutingimust põhikooli füüsikakursusest, kus seda illustreeriti järgmise näitega. Kangil, mis võib vabalt pöörelda ümber toetuspunkti O, paiknevad kaks koormust. l 2 l O Väiksem koormus kangi toetuspunktile lähemal tasakaalustab suurema koormuse toetuspunktist kaugemal (antud juhul ühe koormuse kaal, mis mõjub kaugusel l toetuspunktist, tasakaalustab kahe samasuguse koormuse kaalu kaugusel l/2 toetuspunktist). Ehk üldisemalt kui rakendada kangi erinevatele õlgadele jõud F1 ja F2 , mille rakenduspunktide kaugused toetuspunktist O on vastavalt l1 ja l 2 , siis kang on tasakaalus, kui F1l1 = F2 l 2 , ...
Kehra Gümnaasium HIV ja AIDS Miniuurimustöö Kehra 2009 2 SISUKORD Mis on AIDS?......................................................................................................................... 4 Kuidas levib HIV?.................................................................................................................. 4 Kuidas ravida HI-viirust?........................................................................................................4 TULEMUSED............................................................................................................................ 5 3 TEOORIA Mis on AIDS? AIDS (Acquired Immune Deficiency Syndrom) on immuunussüsteemi puudulikkus, mis hävitab keha võime tulla toime ja võidelda teiste haiguste ...
Mis on punkti trajektoor? Trajektoor - pidev joon, mille joonistab punkt oma liikumisel. Milline on punkti liikumise seadus vektorkujul? r = r(t) Mida nimetatakse loomulikuks koordinaadiks punkti liikumise korral trajektooril? Loomulik koordinaat punkti liikumisel on kõverjooneline koordinaat s. s = f (t ) Mis vahe on ristkoordinaatidel ja loomulikel koordinaatidel punkti kinemaatikas? Loomulikel koordinaatidel on trajektoori kujuline kõverjooneline koordinaattelg. t s x 2 y 2 z 2 dt 0 Neid seob valem: Kirjutada punkti liikumise seadus trajektooril loomuliku koordinaadi kaudu. s f (t ) Kirjutada punkti liikumise seadus ristkoordinaatides. x f1 (t ) y f 2 (t ) z f 3 (t ) Defineerida punkti liikumise kiirus. Kirjutada ka valem. Punkti liikumise kiirus on selle punkti kohavektori tuletis aja järgi. ds v s ...
Jõud- suurus, mis on kehade vastastikuse mõju mõõduks. Tähis F, ühik njuuton N. Kirjeldamiseks on vaja anda tema rakenduspunkt, suund ,moodul . Rakenduspunkt ja suund koos määravad jõu mõjusirge. Ekvivalentsed ehk samaväärsed on need jõud, millel on sama rakenduspunkt, suund ja moodul. Jõusüsteemi moodustavad mitu ühele ja samale kehale rakendatavat jõudu. Kui üht jõusüsteemi saab asendada teisega, ilma et keha seisund muutuks, siis on tegemist ekvivalentse jõusüsteemiga. Kui jõusüsteemiga on ekvivalentne ainult üks jõud , siis nimetatakse seda jõudu resultandiks Fres, mida on võimalik leida näiteks rööpkülikuaksioomi korduval kasutamisel.. Tasakaalu all mõistetakse mehaanikas keha paigalseisu teiste kehade suhtes. Staatika- mehaanika haru , mis uurib jõusüsteemide omadusi ja nende tasakaalu. Põhiülesanneteks on jõusüsteemi taandamine ja jõusüsteemi tasakaalutingimustega. Jäiga keha mudel- vaatleme keha justkui deformatsiooni ei esineks...
§15. Ampirei seadus Magnetväli mõjub vooluga juhi kõikidele osadele , mis määrab üksikule juhi lõigule(vooluelemendile) mõjuva jõu. Seaduse avastas 1820. aastal Ampere. Ta paigutas hoburaud magneti pooluste vahele sirge juhi, millele mõjuvat jõudu sai mõõta. Katsetes nähtub, et voolutugevuse suurenemisel 2 korda, suurened ka juhile mõjuv jõud 2 korda. Lisades ühele hoburaud magnetile veel teise, suureneb magnetväljas paikneva juhi lõigu pikkus 2 kordseks. Kasutades erinevaid magneteid, saab kindlaks teha, et juhi lõigule magnetväljas mõjuv jõud(Ampirei jõud) on võrdeline induktsiooni vektori mooduliga B. Ampirei jõud- sõltub ka vektori B ja juhi vahelisest nurgast. Vooluelemendi suunaks loeme voolu suuna. Olgu vektori B ja vooluelemendi vaheline nurk .(joonis 1) Katsed näitavad, et magnetväli mille induktsiooni vektroi suund ühtib vooluelemendi suunaga ei avalda voolule mingit mõju. Seega sõltub ka jõu mo...
Sele 5. Piduriseadmete paiknemine veokil (allikas: Knorr) EBS elektritoide põhineb kahel eraldi ühendusel klemmiga 30(30a ja 30b; pidev toitepinge). Mõlemad vooluringid on eraldi kaitstud ja neid ei tohi kasutada muude tarbijate toiteks. EBS lülitatakse elektriliselt sisse süütelüliti (klemm 15) või EBS juhtseadme pidurilüliti (klemm 30) abil. Esirataste pöörlemissageduse ja kulumise andurid on ühenduses EBS juhtplokiga ning tagarataste vastavad andurid tagasilla rõhureguleerimismooduliga. Andmevahetus EBS juhtploki ja tagasilla mooduli vahel toimub erilise CAN andmesiini "Pidur" kaudu. Väljalülitatud aku (mehaaniline või elektrooniline aku pealüliti) korral ei saa EBSi sisse lülitada. Siis on kasutada ainult liiasussüsteem. · Andmevahetus sõiduki teiste osadega (mootori ja käigukasti juhtimine, retarder) toimub CAN andmesiini "Ajamiahel" kaudu. ...
Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks. 1. Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised 2. Superpositsiooniaksioom. Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha mistahes teise punkti. 3. Jõurööpküliku aksioom. . Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha seisundit muutmata asendada resultandiga, mis võrdub nende geomeetrilise summaga. Aksioom kehtib ka deformeeruva keha juhul. 4. Mõju ja vastumõju aksioom (Newtoni III seadus ). Kaks keha mõjutavad teineteist võrdvastupidiste jõududega, millel on ühine mõjusirge. 5. Jäigastamise aksioom. . Deformeeruva keha tasakaal ei mu...
1. Teoreetilise mehaanika aine. Teoreetilise mehaanika osad (staatika, kinemaatika, dünaamika, analüütiline mehaanika). Insenerimehaanika. *Mehaanika on teadus reaalsete objektide liikumisest. * Teoreetiline mehaanika on mehaanika osa, mis uurib absoluutselt jäikade kehade paigalseisu ja liikumist nendele kehale rakendatud jõudude mõjul. Absoluutselt jäigaks kehaks nimetame keha, mille kahe mistahes punkti vaheline kaugus on jääv sõltumatult kehale toimivatest välismõjutustest (jõududest). *Seega: absoluutselt jäigas kehas ei toimu iialgi mitte mingisuguseid deformatsioone. On aga selge, et absoluutselt jäiga keha mõiste on abstraktsioon, sest kõik reaalsed kehad tegelikult ikkagi deformeeruvad välisjõudude mõjul. Igapäevases praktikas me aga näeme, et rakendatud jõudude toimel on need deformatsioonid üldiselt väga väikesed ja paljudes ülesannetes võib nad esimeses lähenduses jätta arvestamata. See asjaolu õigustabki jäiga keha kasutami...
Füüsika kontrolltöö nr. 1 Mehaanika 1.Mehaanika uurib kehade liikumist ja paigalseisu ruumis ning liikumise muutumist mitmesuguste mõjude tagajärjel. Mehaanika põhiülesanne on liikuva keha asukoha määramine/arvutamine mistahes ajahetkel. 2.Kinemaatika kirjeldab kehade liikumist ruumis, seejuures pole tähtis, mis seda liikumist esile kutsub. 3.Mehaaniline liikumine on keha asukoha muutumine teiste kehade suhtes. 4.Kulgliikumine on sama trajektooriga/sümmetriline liikumine. Nt. Õmblusmasinanõela üles-alla liikumine. Punktmass on keha mille massi me ei arvesta/punktmass on liikuva keha mudel. Nt.ühest linnast teise sõitva autot kujutame me punktina, selle punkti massi me ei arvesta. 5.Trajektoor on joon mida mööda keha liigub. Nihe on lühim tee kahe punkti vahel, nihke tähis on s(nooleke nihke suunaga peal) ja mõõtühik on 1 meeter e. 1m . 6.Taustkeha on keha, mille suhtes vaadeldakse teiste kehade liikumist. Taustkeha, se...
TARTU ÜLIKOOLI TÜRI KOLLEDZ Lihtsa sisupaketi loomine tarkvaraga Course Lab Juhendaja: Karin Ruul 2 Karin Ruul Türi 2010 Sinu Nimi 30.12.2012 3 Karin Ruul Sisukord Sisukord...................................................................................................................................... 3 Lihtsa sisupaketi loomine tarkvaraga Course Lab...................................................................... 4 Sinu Nimi 30.12.2012 4 Karin Ruul Lihtsa sisupaketi loomine tarkvaraga Course Lab Karin Ruul, E-õppe Arenduskeskuse peaharidustehnoloog Course Lab on tasuta tarkvara, mis või...
TALLINNA TEHNIKAKÕRGKOOL TALLINN COLLEGE OF ENGINEERING KIUDTUGEVDATUD KOMPOSIITMATERJALID REFERAAT Õppeaines: Tehnomaterjalid I Juhendaja: D. Arensburger Mehaanika teaduskond Õpperühm: MI- 21 Tallinn 2009 MATERJALI OMADUSED SURVEL Õhukeste komposiitlaminaatide survetaluvuse omadusi on suhteliselt raske mõõta tänu proovidetaili külgpidisele rabedusele. On proovitud mitmeid testimismeetodeid ja mitmeid proovidetaili kujusid, et vältida esilekerkivat probleemi. Siinkohal kirjeldaks neist meetoditest kolme. Celanese test: see test on võetud kui standartne surve test ja seda on detailselt kirjeldatud ASTM D3410-87 standardis. Testi põhimõte seisnes sellest et võetakse sirge proovidetail, mille otsetesse kinnitatakse labad. Seejärel asetatakse see koonilise kujuga silindri sisse, mis omakorda sobitatakse täpselt teise vormi sisse mille siseserv...
Füüsika- loodusteadus, mis uurib täpisteaduslike meetoditega mateeria põhivormide liikumist ja vastastikmõju Mateeria põhivormid on aine ja väli Aine on mateeria vorm, mida iseloomustab nullist erinev sisumass Väli on mateeria vorm, mis vahendab vastastikmõjusid Mehaanika jaguneb: kinemaatika, dünaamika, staatika Kinemaatika- uurib kuidas keha liigub, ei uuri liikumise põhjuseid. Vastab küs. kuidas keha liigub? Dünaamika- uurib, miks keha liikuma hakkab, uurib liikumise põhjuseid (miks keha liigub?) Staatika- selgitab välja millised on tasakaalutingimused, uurib millal keha on paigal (millal keha on paigal?). Mehaanika seisneb kehade või nende osade ümberpaiknemise uurimises, kusjuures ümberpaiknemine toimub teiste kehade suhtes. Üks vanemaid teadusi. Mehaanika alusepanijad: G. Galilei (1564-1642) avastas mehaanika põhlised seaduspärasused. I. Newton (1642-1727) lõi ühtse seadusliku süsteemi. L.Euler (1707-1783) pani mehaanika kirja val...
§15. Ampirei seadus Magnetväli mõjub vooluga juhi kõikidele osadele , mis määrab üksikule juhi lõigule(vooluelemendile) mõjuva jõu. Seaduse avastas 1820. aastal Ampere. Ta paigutas hoburaud magneti pooluste vahele sirge juhi, millele mõjuvat jõudu sai mõõta. Katsetes nähtub, et voolutugevuse suurenemisel 2 korda, suurened ka juhile mõjuv jõud 2 korda. Lisades ühele hoburaud magnetile veel teise, suureneb magnetväljas paikneva juhi lõigu pikkus 2 kordseks. Kasutades erinevaid magneteid, saab kindlaks teha, et juhi lõigule magnetväljas mõjuv jõud(Ampirei jõud) on võrdeline induktsiooni vektori mooduliga B. Ampirei jõud- sõltub ka vektori B ja juhi vahelisest nurgast. Vooluelemendi suunaks loeme voolu suuna. Olgu vektori B ja vooluelemendi vaheline nurk .(joonis 1) Katsed näitavad, et magnetväli mille induktsiooni vektroi suund ühtib vooluelemendi suunaga ei avalda voolule mingit mõju. Seega sõltub ka jõu m...
Staatika 1. Mida nimetatakse jõuks? jõud on - vektoriaalne suurus, mis väljendab ühe materjaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kehade liikumise muutus või kehaosakeste vastastikuse asendi muutus(deformatsioon). 2. Mis on jõu mõjusirge? jõu mõjusirge on sirge, millel asub jõud. 3. Mida nimetatakse absoluutselt jäigaks kehaks? absoluutselt jäigaks kehaks nim. sellist keha, mille, mis tahes kahe punkti kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks? Kui ühe jõusüsteemi saab asendada teise jõusüsteemiga ilma keha liikumist või paigalseisumuutmata, siis need jõusüsteemid on ekvivalentsed. Nt. ( F 1, F 2, ... , F n) ( P 1, P 2, ..., P k) 5. Millist jõusüsteemi võib nimetada tasakaalus olevaks jõusüsteemiks...
Teist ja kolmandat j¨arku determinandid. Crameri valemid. Kompleksarvud Tartu 2016 Teist ja kolmandat j¨ arku determinandid. Crameri valemid. Kompl Sarruse (kolmnurga) reegel 3. j¨arku determinantide arvutamiseks Teist ja kolmandat j¨ arku determinandid. Crameri valemid. Kompl ¨ Ulesanne Arvutage determinandid 1 2 4 2 4 0 −1 3 3 1 3 −2 5 −6 4 2 1 0 2 5 6 −4 −3 4 1 2 5 1 3 2 Teist ja kolmandat j¨ arku determinandid. Crameri valemid. Kompl LVS lahendamine Crameri valem...
Kordamisküsimused Staatika, kinemaatika ja dünaamika 1. Mida nimetatakse jõuks? Jõud on vektoriaalne suurus, mis väljendab ühe materjaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kehade liikumise muutus või keha osakeste vastastikuse asendi muutus ehk deformatsioon. Jõu iseloomustamiseks peab tal olema rakenduspunkt, suund ja moodul. 2. Mis on jõu mõjusirge? Jõu mõjusirge on sirge, mille peal jõu vektor asetseb. 3. Mida nimetatakse absoluutselt jäigaks kehaks? Absoluutselt jäigaks kehaks nimetatakse sellist keha, mille mis tahes kahe punkti vaheline kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks?' Kahte jõusüsteemi võib nimetada ekvivalentseks, kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või paigalseisus midagi ei muutu. 5. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks...
Iseseisevtöö nr1. 1. MOODUL 1 Infotehnoloogia põhimõisted ja infoühiskond. Inimene peaks teadma: · Põhimõiseid- ( infotehnoloogia, riist- ja tarkvara); arvutite tüüpe ( suurarvutid, personaalarvutid, sülearvutid); Arvuti koostisosad( sise- ja välisseadmed, hiir, klaviatuur, monitor, protsessor); · Riistvara- protsessor ( peab teadma, milleks protsessorit kasutatakse, tema töökiirust ja mahtu) sisendseadmed ( teadma arvuti olulisemaid sisendseadmeid nagu hiir, klaviatuur, protsessor jne) · Mälu mäluseadmeid ( mälupulk, disett, lisakõvaketas, cd jne); mälutüüpe (Aru saama erinevustest arvuti sise ja välismälu, otsepöördusmälu (RAM) ja püsimälu (ROM) vahel), mälumõõtmine( peaks teadma arvutis kasutatavaid mõõtühikuid, seostama mälu mahtu sümbolite, teksti, pildi jne vahel) · Tarkvara-tarkvara tüübid ...
Eksamiküsimused Staatika, kinemaatika ja dünaamika 1. Mida nimetatakse jõuks? Jõud on vektoriaalne suurus, mis väljendab ühe materiaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kas kehade liikumise muutus või keha osakeste vastastikuse asendi muutus (deformatsioon). 2. Mis on jõu mõjusirge? Sirget, mida mööda on jõud suunatud, nim jõu mõjusirgeks. Jõu mõjusirge saadakse jõuvektori sirge pikendamisel mõlemale poole. 3. Mida nimetatakse absoluutselt jäigaks kehaks? Absoluutselt jäigaks kehaks nim sellist keha, mille mistahes kahe punkti vaheline kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks? Kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või tasakaalus mitte midagi ei muutu, siis neid jõusüsteeme nim ekvivalentseteks. 5. Millal võib kahte jõusüsteemi n...
Eksamiküsimused Staatika, kinemaatika ja dünaamika 1. Mida nimetatakse jõuks? Jõud on vektoriaalne suurus, mis väljendab ühe materiaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kas kehade liikumise muutus või keha osakeste vastastikuse asendi muutus (deformatsioon). 2. Mis on jõu mõjusirge? Sirget, mida mööda on jõud suunatud, nim jõu mõjusirgeks. Jõu mõjusirge saadakse jõuvektori sirge pikendamisel mõlemale poole. 3. Mida nimetatakse absoluutselt jäigaks kehaks? Absoluutselt jäigaks kehaks nim sellist keha, mille mistahes kahe punkti vaheline kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks? Kui ühe jõusüsteemi võib asendada teisega nii, et keha liikumises või tasakaalus mitte midagi ei muutu, siis neid jõusüsteeme nim ekvivalentseteks. 5. Millal võib kahte jõusüsteemi n...
Juhend raamatupidamisprogrammi kontrollimiseks Referaat Tallinn 2012 Sisukord Sisukord..................................................................................................................... 2 Sissejuhatus............................................................................................................... 3 1.1Müügiarvete sisestamine ................................................................................. 4 1.2 Müügiarvete kontrollimine................................................................................6 1.3 Kreeditarvete sisestamine................................................................................ 7 2.1 Ostuarvete lisamine......................................................................................... 8 2.2 Ostuarvete kontrollimine................................................................................ 10 2.3 Kre...
Süsteemi testimine ja teostamine 1. Nimeta viisid, mis tõstavad tarkvara kvaliteeti! Parendada tarkvara arendamise protsesse, koolitada sellega tegelevaid inimesi. Teine viis: testida lõpptulemust so käivitada koodi. 2. Millisel juhul on toode kvaliteetne? Toode on kvaliteetne, kui ta rahuldab oma tööga vajadusi, millised motiveerisid toodet looma. 3. Kirjelda lühidalt moodultestimist! Testitakse konkreetset tarkvaramoodulit ühte alamsüsteemi kogu süsteemist. Testimist viib läbi moodulit realiseeriv arendaja. Testitakse enne, kui moodul integreeritakse ülejäänud süsteemi. Testimisel tuleb jälgida, et moodul vastaks analüüsis püstitatud nõuetele. Mooduleid testitakse andmetepõhiselt: õigete, puudulike ja vigaste andmetega. Testija tunneb testitava tarkvara sisemist ülesehitust ja tööloogikat. 4. Kirjelda lühidalt integratsioonitestimist! Testitakse moodulitevahelist koostööd - kontrollitakse, kas kokku pandud moodulid ...
Mis on loogiline „1“? Valige üks või mitu: a. Omistamisoperatsioon b. Elektriahela katkestus c. Signaal, mis kannab mingit informatsiooni d. (Nominaalne) elektrivool ahelas Tagasiside Sinu vastus on õige. Õiged vastused on järgmised: (Nominaalne) elektrivool ahelas, Signaal, mis kannab mingit informatsiooni Küsimus 2 Õige Hindepunkte 1.00/1.00 Märgi küsimus lipuga Küsimuse tekst Baidi bittide arv Valige üks: a. 8 b. 65 536 c. 255 d. 16 Tagasiside Sinu vastus on õige. Õige vastus on: 8 Küsimus 3 Õige Hindepunkte 1.00/1.00 Märgi küsimus lipuga Küsimuse tekst Baidi diapasoon Valige üks: a. 0 - 16 b. 0 - 220 c. 0-8 d. 0 - 255 Tagasiside Sinu vastus on õige. Õige vastus on: 0 - 255 Küsimus 4 Õige Hindepunkte 1....
Tallinna Tehnikaülikool Ehituse ja arhitektuuri instituut Konstruktsiooni- ja vedelikumehaanika õppetool LABORATOORNE TÖÖ nr. 2 Elastsuskonstantide määramine Üliõpilane: Alisa Rauzina Matrikli nr: 153943 Rühm: EAUI 61 Juhendaja: Mirko Mustonen Kuupäev: 27.02.18 Tallinn 2018 Töö eesmärk: määrata terasest silindrilise katsekeha elastsuskonstandid. Kasutatud tööriistad: · Takistustensoandur Katsekeha: Joonis 1. Katsekeha kuju ja mõõdud Joonis 2. Moonete aegrida Valin : t1=75 t2= 125 t3=175 t4=225 2 A=3318,3 mm2 Tabel 1. Moonete ja pingete arvutustabel t eps_1 eps_2 eps_3 eps_4 eps_1,2 eps_3,4 Koormus Jõud ...
Mõisted Elektrilaeng keha iseloomustav füüsikaline suurus, mis näitab, kui tugevasti keha osaleb elektromagnetilises vastastik mõjus (tähis q) Laengute jagunemine jagunevad positiivseteks ja negatiivseteks. Samanimelised laetud kehade vahel mõjub tõukejõud, erinimeliste laengute korral aga tõmbejõud. Elementaarlaeng - Elementaarlaeng on prootoni (positiivne) või elektroni (negatiivne) elektrilaeng Laengu jäävuse seadus on füüsika seadus, mille kohaselt elektriliselt isoleeritud süsteemis on igasuguse kehadevahelise vastasmõju korral kõigi elektrilaengute [algebraline summa] jääv Juhid on ained, milles vabade laengukandjate arv on väga suur Dielektrikud e mittejuhid sisaldavad väga vähe vabu laengukandjaid ning seetõttu on neis tekkiv elektrivool väga nõrk Pooljuhid laengukandjad ei ole pooljuhtides küll alati vabad, kuid neid saab suhteliselt kergesti vabadeks muuta Elektri...
Determinandid DEF 1: Eeskirja f, mis seab hulga V igale elemendile x vastavusse hulga W teatava elemendi y nim kujutuseks hulgast V hulka W ning märgitakse üles järgmiselt: f:VWvõi V (f)W või xy või y=f(x) DEF 2: Kui iga x korral hugast V on eeskirja f abil vastavusse seatud üks kindel y hulgast W, siis öeldakse, et tegemist on ühese kujutamisega hulgast V hulka W Determinant reaalarv, millele on vastavusse seatud ruutmatriks. DEF 3: Determinandi arvutuseeskiri: Determinantide omadusi 1) Det väärtus ei muutu, kui tema read ja veerud vastavalt ümber paigutada (transponeeritud maatriks) 2) Kui det teatavad 2 rida/veergu omavahel ümber paigutada, siis muutub det märk vastupidiseks 3) Det mingi rea/veeru kõigi elementide läbi korrutamisel ühe ja sama arvuga korrutub kogu det läbi sama arvuga 4) Kui det on teatavad kakse rida/veergu kas võrdsed või võrdelised, siis võrdub ko...
1.Sidemereaktsiooniks (toereaktsiooniks) nimetatakse jõudu, millega side takistab keha liikumist. Üldjuhul toereaktsiooni suurus ja suund on tundmatu enne ülesanne lahendamist ning neid avastatakse lahendusega. 2.Milliste parameetritega iseloomustatakse jõudu? Jõud on vektoriaalne suurus, teda iseloomustatakse arvväärtuse, rakenduspunkti ja suunaga. 3. Tasapinnaline jõusüsteem ja selle tasakaaluks vajalikud tingimused.Tasapinnaliseks jõusüsteemiks nimetatakse jõusüsteemi, mille jõud asetsevad ühes tasapinnas. Ühes punktis lõikuvate mõjusirgetega jõudude süsteemi nimetatakse koonduvaks jõusüsteemiks. Kui kehale mõjub mitu jõudu siis võib alati leida nende jõudude resultandi. 1.Tasapinnalise jõusüsteemi tasakaaluks on vajalik ja piisav, et kõikide jõudude projektsioonide algebralised summad kahel koordinaatteljel ja kõikide jõudude momentide algebraline summa suvalise punkti suhtes võrduksid nulliga. ...
Kuidas käsitleda liikumisvõrrandit. Vektorkujul antud liikumisvõrrandiga on ikka ja jälle probleeme. Et asi ükskord selgeks saaks, annan lühikonspekti. Alguseks lepime kokku tähistes: 1. Mis on liikumisvõrrand? - on funktsioon, mis määrab liikuva keha (punkti!) asukoha mingil ajahetkel. Võib olla igasugune funktsioon. - keha (punkti!) asukoha määrab kohavektor, mis antakse kolme koordinaadiga (x,y,z). Need koordinaadid määravad keha asukoha kolmruumi ortonormaalse reeperi suhtes. - ortonormaalne reeper koosneb kolmest omavahel risti olevast ühikvektorist. Tähistame neid: i, j, k, peale paneme vektorimärgid. Kokku saame valemi vektorkujul mis on samaväärne kolme skalaarse võrrandiga: 2. Newtoni mehaanikas on kombeks esitada neid võrrandeid ruutpolünoomina 3. Liikumisvõrrandi esimest tuletist nimetatakse kiiruseks: ja teist tuletist kiirenduseks: Kui kiirendus on konstantne, on kõik kolm koordinaatvõr...
Rakendusmehaanika Kordamisküsimused 1. Jõusüsteem: · Mitu ühele ja samale kehale mõjuvat jõudu moodustavad jõusüsteemi · Kui üht jõusüsteemi saab asendada teisega, ilma et keha seisund (liikumine või paigalseis) muutuks, siis selliseid jõusüsteeme nimetatakse ekvivalentseteks. · Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks. 2. Tasakaaluaksioom: Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised. 3. Superpositsiooniaksioom Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Ei kehti deformeeruva keha juhul (miks?). Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha mistahes teise punkti. 4. Jõurööpküliku aksioom: Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha seisundit muutma...
Curriculum Vitae Nimi: LIIS KASEKÄND Sünniaeg: 05.04.1991, Pärnu Aadress: Väike-Aru 4-16, 80036, Pärnu Telefon: 58324149 E-post: [email protected] HARIDUSKÄIK 2012 - 2014 Pärnumaa Kutsehariduskeskus, Majandusarvestus ja maksundus 2010 2012 Pärnumaa Kutsehariduskeskus, Kodumajandus 1998 - 2010 Keskkool, Pärnu Ülejõe Gümnaasium TÄIENDKOOLITUS Dets 2013 Administreerimis kursus Naiskodukaitse vabatahtlikule juhule, 60h Juuni 2013 Juhtimine praktikas 1, 30 h Juuni 2013 Esmaabi moodul, 16 h Nov 2012 Juhtimine praktikas 2, 30 h Märts 2012 Avalike suhete kursus, 30h Veebruar 2012 Avaliku esinemise kursus, 38h Dets 2009 Toitlustus muudul. 16 h TÖÖKOGEMUS Suvi 2011 Papli kohvik, Klienditeemindaj Suvi 2010 Steffni pizzares...
Kinemaatikamehaanika osa, milles uuritakse kehade liikumise geomeetrilisi omadusi. Mehhaanikaline liikuminekeha asendi muutumine teiste kehade suhtes ruumis aja vältel Liikuva keha asendi määramiseks kinnistatakse sellele kehale, mille suht liikumist uuritakse jäigalt kordinaat telgede süsteem, mida nim. tustsüsteemiks Kahe ajahetke vahet t=t t nim. ajavahemikuks Pidev joon,mille joonistab iikuv punkt, antud taustsüsteemi suhtes on punkti trajektoor Punkti kiirendus iseloomustab punkti kiiruse muutumist aja vältel. Kõrgjooneline kordinaat ehk loomulik kordinaat Kiirendusvektor on alati suunatud trajektoori nõgususe poole. Ühtlaselt muutuvaks nim. punkti sellist liikumist, mille puhul puutekiirenduse moodul on konstantne(jääv). Rööpliikuminekeha selline liikumine, mille puhul iga kehaga muutumatult seotud sirge jääb liikumise kestel algsihiga paraleelseks. Pöörleminejäiga keha selline liikumine,mille puhul mingi kehaga muutumatult ...
TALLINNA TEHNIKAÜLIKOOL Informaatikainstituut Infosüsteemide õppetool Projekt aines IDU5360 "Kontseptuaalne süsteemianalüüs" e-deklaratsioonide haldamine Üliõpilane: ... Õpperühm: ... Matrikli nr.: ... Juhendaja: ... Tallinn 2011 2 Autorideklaratsioon Deklareerin, et käesolev ainetöö on minu töö tulemus ja seda ei ole kellegi teise poolt varem üheski aines esitatud. ............................. ................................ (kuupäev) (töö esitaja allkiri) ...
Arvu a nimetatakse kompleksarvu a + ib reaalosaks ja arvu bi selle imaginaarosaks. KOMPLEKSARVUD Kui a = 0, siis on tegemist imaginaararvuga bi, kui b = 0, siis saame arvu a + 0·i, mis on reaalarv a. Kui a = b = 0, siis siis saame tulemuseks arvu 0. KOMPLEKSARVU MÕISTE. TEHTED KOMPLEKSARVUDEGA Kaks kompleksarvu on omavahel võrdsed parajasti siis, kui nende reaalosad ja 1. Kompleksarvu mõiste imaginaarosad on vastavalt võrdsed: ...
1. Skalaarid ja vektorid - Suurusi(aeg, mass, inertsmoment), mille määramiseks piisab üheainsast arvväärtusest, nimetatakse skalaarideks. Suurusi, mida iseloomustab arvväärtus(moodul) ja suund, nimetatakse vektoriteks. Tehted vektoritega: a)Vektori korrutamine skalaariga. av = av Vastuseks uue pikkusega, kuid samasuunaline vektor. b)Vektorite liitmine. v=v1+v2 Vastuseks uus vektor, ei olene vektorite järjekorrast. c)Kahe vektori skalaarkorrutiseks nimetatakse skalaari, mis on võrdne nende vektorite moodulite ja nendevahelise nurga koosinuse korrutamisega.v1v2cosα=vˉˉ1∙vˉˉ2 d)Kahe vektori vektorkorrutis on vektor, mille moodul on võrdne vektorite moodulite ja nendevahelise siinuse korrutisega, siht on risti tasandiga, milles asuvad korrutatavad vektorid ja suund on määratud parema käe kruvi järgi. v1xv2sinα=vˉˉ1∙vˉˉ2 2. Kinemaatika - a)Ühtlane kulgliikumine v=s/t=...
Kompleksarvud Kompleksarvu mõiste. Kompleksarve on kombeks tähistada väikese tähega z. Kompleksarvudel on mitmeid esitusviise ehk kujusid. Kõige levinum on kompleksarvu algebraline kuju. Def Kompleksarvuks (algebralisel kujul) nimetatakse arvu z = a + ib, kus a ja b on reaalarvud ja i on imaginaar ühik. Imaginaarühik, mida tähistatakse i, defi'kse võrdusega i2 = -1.Kõigi kompleksarvude hulka tähistatakse C. Def Kompleksarvu z = a + ib C korral nim arvu a R selle kompleksarvu reaalosax ja arvu b R nim selle kompleksarvu imaginaarosaks. Kaks kompleksarvu on võrdsed parajasti siis, kui 1) on võrdsed nende reaalosad, 2) on võrdsed nende imaginaarosad. Algebraline kuju on kompleksarvu kujudest kõige levinum. Kuid on ka teisi esitusviise. Kompleksarve nim arvudex, sest nendega saab sooritada aritmeetilisi tehteid: liitmist, lahutamist, korrutamist, jagamist. Komar liitmine ja lahutamine on kõige otstarbekam teha algebralisel kujul. Def. Ko...
Integreeritud tootearendus Moodul 1 töö vastused 1.Kui suur osa toote maksumusest kavandatakse tootesse projekteerimise käigus? vähemalt 70% 2. Kas autotehas on oma tootearenduse põhivormilt?Koostamisettevõte 3. milline toodud omadustest ei kuulu tooteperede moodustamise eeliste hulka?paremad tehnilised näitajad 4.Mis sundis Eesti Autotehase näites auto konstruktsiooni ringi tegema?moe muutus 5. Milline nimetatud tegevustest ei kuulu iseseisva valdkonnana tootearenduse kontseptsiooni?müük 6. Kui palju vahendeist raisatakse statistika alusel tootearenduses tulutult?50-60% 7. Milline toodud näitajatest ei kuulu tootearenduse edukuse põhikriteeriumide hulka? tootearenduse edukus 8. Milline ingliskeelseist termineist vastab toote väliskuju kavandamisele?industrial design 9. Milline nimetatud omadus ei kuulu moodulsüsteemide põhiliste eeliste hulka? konstruktsiooni parem pakendus 10. Mis perioodil avati tootearendusalane haridus TTÜ mehaanik...
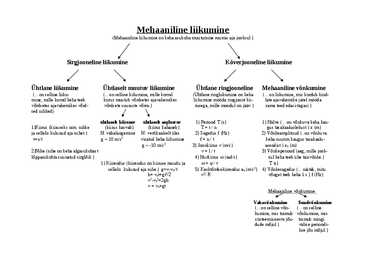
Mehaaniline liikumine (Mehaaniline liikumine on keha asukoha muutumine ruumis aja jooksul.) Sirgjooneline liikumine Kõverjooneline liikumine Ühtlane liikumine Ühtlaselt muutuv liikumine Ühtlane ringjooneline Mehaaniline võnkumine (...on selline liiku- (...on selline liikumine, mille korral (Ühtlane ringliikumine on keha (...on liikumine, mis kordub kind- mine, mille korral keha teeb kiirus muutub võrdsetes ajavahemikes liikumine mööda ringjoont kii- late ajavahemike järel mööda võrdsetes ajavahemikes võrd- võrdsete suuruste võrra.) rusega, mille moodul on jääv.) sama teed edasi-tagasi.) sed nihked) ...