Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Kodune töö nr 3 variant 5". Need materjalid aitavad sul teemat sügavamalt mõista.
geomeetria, erko, sinisaluANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z 1 8. Vektorite kollineaarsus a b,(
145 Tugevusanalüüsi alused 9. DETAILIDE PIKKEDEFORMATSIOONID 9. DETAILIDE PIKKEDEFORMATSIOONID 9.1. Koormatud varda mingi punkti siire Eelnevast: Deformatsioon (kui nähtus) = detaili (keha, varda) kuju ja mõõtmete muutus (koormuse mõjudes) Deformeerumise käigus detaili (keha, Punkti siire = punkti asukoha (koordinaatide) varda) punktide asukohad muutuvad muutus (on määratud algasukohast lõppasukohta (ehk siirduvad) (Joon. 9.1) suunatud vektoriga) Sirge varda deformatsioon ja punktide siirded Punkti algasukoht
A. F b1 a z0 : 2 . S235. [ ] = 235/2,1= 112 Mpa - [ ] = 0,6*112 = 70 MPa - [ S ] = 2,1 - [ ]c = 1,7*112 = 190 Mpa - F = 260 kN - : 1) () 2) , - 3) 4) 1. F 260 N L FL 130kN 2 2 NL - NL AL AL - ( ) NL 130 10 3 AL ; AL 11,6 10 4 m 2 11,6cm 2 112 10 6 - , , 15%. Ak 1,15 AL 1,15 11,6 13,3cm 2 RUUKKI 757510 : z0=22,1 75 10 T 10 bT 75 bT 75 - T = 10 - AT 14,1cm 2 -
Eesti Põllumajandusülikool Maaehituse instituut INSENERIGRAAFIKA Ainekursus MIT-7.307 Kujutava geomeetria põhivara Koostanud Harri Lille Keeletoimetaja Karin Rummo Tartu 2003 Sissejuhatus Kujutav geomeetria on see geomeetria eriharu, milles pitakse tasandil (joonisel) ruumiliste ülesannete lahendamise meetodeid ning positsiooni-, mte- ja konstruktiivsete ülesannete lahendamise vtteid. Positsiooniülesanneteks nimetatakse geomeetriliste kujundite vastastikuse kuuluvuse ja likumise määramist. Mteülesanded on geomeetriliste kujundite kauguste ja nende telise suuruse leidmine. Konstruktiivsete ülesannete sisuks on etteantud tingimustele vastavate geomeetriliste kujundite (nende kujutised joonisel) loomine. Kasutatud on järgmisi tähiseid: A,B,C,....; 1,2,3,... - ruumipunktid; a,b,c,.... - jooned; ,,,....,,,.... - nurgad;
ANALÜÜTILINE GEOMEETRIA RUUMIS, VEKTORID VEKTORI MÕISTE, MOODUL JA SUUND Neid suurusi, mida on võimalik iseloomustada ühe arvuga, nimetatakse skalaarseteks (temperatuur, mass, töö). Suurusi, mille iseloomustamiseks on vaja arvu ja suunda, nimetatakse vektoriaalseteks (jõud, kiirus, kiirendus). Definitsioon. (Geomeetriliseks) vektoriks nimetatakse suunatud sirglõiku, lõiku, millel tehakse vahet alguse ja lõpu vahel. Kui vektori algus on punktis A ja lõpp punktis B, siis tähistatakse AB , a . Vektor on kindla sihi, suuna ja pikkusega lõik. Siht on teda kandva sirge siht. Suund on alguspunktist lõpp-punkti poole. Definitsioon. Vektori mooduliks nimetatakse tema pikkust, see on lõigu AB pikkust ja tähistatakse AB AB , a a . Vektori moodul on skalaarne mittenegatiivne suurus. Definitsioon. Nullvektoriks nimetatakse vektorit, mille algus- ja lõpp-punkt langevad kok
1.Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Süsteemi maatriks ja laiendatud maatriks. Lineaarse võrrandi all mõistetakse võrrandit kujul a1 x1 + a2 x2 + ... + an xn = b , (1) kus a1 , a2 , ... , an ja b on fikseeritud arvud ning x1 , x2 , ... , xn on tundmatud. Arvu b nimetatakse vaadeldava võrrandi vabaliikmeks, arve a1 , a2 , ... , an aga tema kordajateks. Def. 1. Võrrandi (1) lahendiks nimetatakse selliseid tundmatute x1 , x2 , ... , xn väärtusi c1 , c2 , ... , cn R , et pärast nende paigutamist võrrandi (1) vasakusse poolde tundmatute asemele kehtiks võrdus a1c1 + a2c2 + ... + ancn = b . Võrrandi (1) lahend on n arvust c1 , c2 , ... , cn koosnev järjestatud lõplik jada. Seega saab teda vaadelda aritmeetilise vektorina
Eksami kordamisküsimused Lineaaralgebra ja analüütiline geomeetria (2015- 2016 aasta sügis) Ristkoordinaadid. Kui ruumis on antud ristkoordinaadisüsteem, siis ruumi iga punkt P on üheselt määrastud ristkoordinaatidega x, y, z, kus x on punkti P ristprojektsioon abstsissteljele, y on punkti P ristprojektsioon ordinaatteljele ja z on punkti P ristprojektsioon aplikaateljele. Kirjutame P(x, y, z). Kahe punkti vaheline kaugus. Kui P1(x1, y1, z1), P2(x2, y2, z2) on ruumi punktid, siis kaugus d punktide P1 ja P2 vahel on määratud valemiga Vektori mõiste Vektor on suunatud lõik alguspunktiga punktis A ja lõpp-punktiga punktis B. Nullvektor Eukleidilises ruumis (näiteks tasandil) on nullvektoriks määramata suunaga vektor, mille pikkus on null. Ühikvektor Kui vektori pikkus on 1, siis teda nimetatakse ühikvektoriks. Vektorite liitmine ja lahutamine Lahutamine toimub sama põhimõtte järgi. Reaalarvu ja vektori korrutis. Vektori pikkus Vektori pikkuseks lo
1. Ristkoordinaadid- kui ruumis on antud ristkordinaadisüsteem, siis ruumi iga punkt P on üheselt määratud ristkordinaatidega x,y,z, kus x on punkti P ristprojektsioon absissteljele, y on punkti P ristprojektsioon ordinaattelele ja z on punkti P ristprojektsioon aplikaattelele P(x,y,z) 2. Kahe punkti vaheline kaugus- Kui P1(x1,y1,z1), P2(x2,y2,z2) on ruumi punktid siis kaugus d punktide P1 ja P2 vahel on määratud valemiga √ 2 2 d= ( x 2−x 1 ) + ( y 2− y 1 ) + ( z 2 + z 1) 2 3. Vektori mõiste-Vektor on suunatud lõik millel on kindel algus- ja lõpp-punkt. 4. Nullvektor-Vektorit, mille pikkus on null, nimetatakse nullvektoriks ja tähistatakse sümboliga . Nullvektori suund on määramata. 5. Ühikvektor- Kui vektori pikkus on 1 6. vektorite liitmine-rööpkülikureegel: Vektorite a ja b summaks nimetatakse niisugust vektorit c, mis väljub nend
1.Vektorruumis on ainult üks nullelement tõestus: Olgu V vektorruum 2 omadus ütleb, et leidub . Olgu meil vektorruumis 1 ja2 vektorruumid. Vastavalt 2 saame seosed x+ 1 =x, 1 +x =x iga xV, y+ 2 =y, 2+y=y iga yV. Valime teises seoses x= 2 ja kolmandad seoses y= 1 Saame 1+ 2= 2 ja 1 +2= 1 oleme saanud 1=1 +2 =2 , et 1 ja 2 olid V nullelemendid, siis on kõik V nullelemendid omavahel võrdsed, st. Saab olla vaid üks nullelement. 2.Sirgete kimp, mis sisaldab teineteisest erinevaid sirgeid üldvõrranditega s: A1x1+A2x2+A3=0; t: B1x1+B2x2+B3=0; koosneb parajasti nendest sirgetest, mille üldvõrrand avaldub kujul (A1x1+A2x2+A3)+(B1x1+B2x2+B3)=0; kus ja on vabalt valitud reaalarvud, mis ei ole korraga nullid. Tõestus: 1) On vaja näidata, et uus võrrand kirjeldab alati antud kimpu kuuluvat sirget: Olgu P(p1,p2) antud kibu keskpunkt, st Ps ja Pt, mistõttu P koordinaadid peavad rahuldama mõlemat võrradit- A1P1+A2P2+A3=0 ja B1P1+B2P2+B3=0. Olgu ,R, siis (A1P1+A2P2+A3)+(B1P1+B2P2+B3)
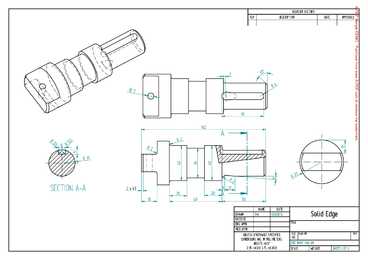
A-PDF Merger DEMO : Purchase from www.A-PDF.com to remove the watermark REVISION HISTORY REV DESCRIPTION DATE APPROVED 2 45 ° R4 O7 48 142 A R0
TALLINNA TEHNIKAÜLIKOOL Masinaelementide ja peenmehaanika õppetool Kodutöö MHE0011 Tugevusõpetus I Töö nimetus: Töö nr. 3 NEET-KEEVIS Üliõpilane: Rühm: Üliõpilaskood: MAHB-32 Juhendaja: Töö tehtud: Esitatud: Arvestatud: P. Põdra 13.11.2011 13.11.2011 A. Neetliide 1. Ülesande püstitus 2d 3d 3d 2d b1 F a z0 Andmed: [ ] = 235/2,9 = 81 Mpa - lubatav tõmbepinge [ ] = 0,56*81 = 45 MPa - lubatav lõikepinge [ S ] = 2,9 - varutegur []c = 3*81 = 243 Mpa - lubatav muljumispinge F = 260 kN - ülekantav koormus Leida: 1. Sobiv nurkteras või terased 2. Needi läbimõõt (d) 3. Neetide arv (n) 4. Needire
TTÜ Ehitiste projekteerimise instituut Teraskonstruktsioonide õppetool Metallkonstruktsioonid II Projekt Üllar Jõgi EAEI 021157 Eesmärk: Projekteerida minimaalse materjalikulu ja lihtsate lahendustega ehituskonstruktsioonid, mis oleksid vajaliku kandevõime ja jäikusega. 1.Lähteandmed Hoone mõõtmed: Hoone laius (postide tsentrist) L=31 m; Hoone pikkus (postide tsentritest) B=60 m; Hoone vaba kõrgus (põranda pinnast fermi alla) H=9,2 m Posti profiiliks on I-profiil.Katusekandjaks on nelikanttorudest kahekaldeline trapetssõrestik. 1.1.Reakanduri staatiline arvutusskeem 1.2. Esialgne konstruktsioonide dimensioneerimine Kanderaamide samm 60:12=5 m Ligikaudne profiili kõrguste määramine Katusesõrestik: h=L/8-L/12=3,88-2,58m Valime sõrestiku kõrguseks 3,5 m. Post: h>1,8xH/20-1,8xH/35,seega 1,0
KÕRGEPINGETEHNIKA Töö nr. 2 „Õhu läbilöök ja pindlahendus 50 Hz sagedusega vahelduvpingel“ Juhendaja Üliõpilased Tallinn 2 Sisukord 1. Töö käik............................................................................................................................. 3 2. Katseseadme ja tööskeemide põhimõtteskeemid ........................................................... 4 3. Arvutused ja mõõtetulemused ......................................................................................... 5 4. Järeldus ............................................................................................................................. 8 Kasutatud kirjandus ................................................
MHE0041 MASINAELEMENDID I Kodutöö nr. 3 Variant nr. Töö nimetus: Keevisliited A-2 B-9 Üliõpilane (matrikli nr ja nimi) Rühm: Juhendaja: 112592 MATB32 Igor Penkov Töö esitatud: Töö parandada: Arvestatud: Ülesanne : Projekteerida teabetahvli aluspost. Arvutada posti ja alusplaadi keevitusühendus. Konstruktsiooni kõrgus l = 7,0 m Tahvli kõrgus h = 2,0 m Tahvli laius b = 3,0 m Tahvli mass mT = 550 kg Paigaldamisala linnaväline maastik 1. Tuulejõu määramine Tuulejõud määratakse avaldisest [1] Fw = q ref ce ( z )c f Aref c d (1) 2 kus qref keskm
t1 1" t-J 59+ 60+ v -------a- tT f--a M,I X i. M' i,t talrL-zr/t 58, Leida nurk q t'asapindade 123 ja 124 vahe[. 59,* Tasapind on ant'ud pdhrldljeqa p ja punkt'iga M; leida esij;itg e ja tasapinna kaldenurgad (p1 ja ez, 60,+ Prisna pdhi ABC aset'seb t'asapinnal u(p,e), Tuletada prisna kaksvaade, vdt't'es prisna ktilgservad risfi fasapinnaga ja prlsma kdrguseks 30 mn, 21 0q./1./o r-" 2" .L 61
TALLINNA TEHNIKAÜLIKOOL Masinaelementide ja peenmehaanika õppetool Kodutöö MHE0011 Tugevusõpetus I Töö nimetus: NEET KEEVIS Töö nr. 3 Ülesande nr. 101 Üliõpilane: Üliõpilaskood: Rühm:Matb-31 Juhendaja: Töö tehtud: Esitatud: Arvestatud: P. Põdra 17.10.2010 22.10.2010 A. Neetliide 1. Ülesande püstitus 2d 3d 3d 2d b1 F a z0 Andmed: [ ] = 160 MPa - lubatav tõmbepinge [ ] = 100 MPa - lubatav lõikepinge bg = 350 MPa - lubatav muljumispinge F = 390kN - ülekantav koorm
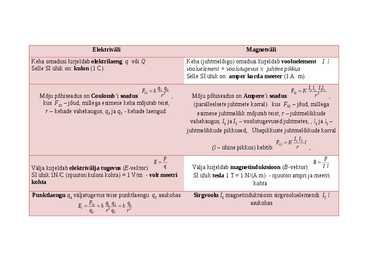
Elektriväli Magnetväli Keha omadusi kirjeldab elektrilaeng q või Q Keha (juhtmelõigu) omadusi kirjeldab vooluelement I l Selle SI ühik on: kulon (1 C) vooluelement = voolutugevus × juhtme pikkus Selle SI ühik on: amper korda meeter (1 A - m) q1 q2 I1 l1 I 2l1 F12 = k F12 = K Mõju põhiseadus on Coulomb'i seadus: r2 , Mõju põhiseadus on Ampere'i seadus: r2 , kus F12 jõud, millega esimene keha mõjutab teist, (paralleelsete juhtmete korral) kus F12 jõud, millega r
MTMM.00.340 Kõrgem matemaatika 1 2016 KÄRBITUD loengukonspekt Marek Kolk ii Sisukord 0 Tähistused. Reaalarvud 1 0.1 Tähistused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 0.2 Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0.3 Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 0.4 Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1 Maatriksid ja determinandid 7 1.1 Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2 Tehted maatriksitega . . . . . . . . . . . . . . . . . . .
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT Õppeaine TUGEVUSÕPETUS I Varda arvutus kandevõimele Ülesanne 101 Kodutöö Õppejõud: Priit Põdra Üliõpilane: Matrikli number: Rühm: Kuupäev: 06.11.09 Tallinn 2009 A. Neetliide 1. Ülesande püstitus 2d 3d 3d 2d b1 F a z0 Andmed: [ ] = 160 MPa - lubatav tõmbepinge [ ] = 100 MPa - lubatav lõikepinge bg = 350 MPa - lubatav muljumispinge F = 300 kN - ülekantav koormus Määrata ja arvutada: · Sobivad nurkterased · Needi läbimõõ
10.klass a1 b1 c1 1. Reaalarvude piirkonnad kui D = 0; D x = 0; D y = 0, siis = = a 2 b2 c 2 2. Astme mõiste üldistamine a m a n = a m +n c)pole lahendeid a1 b1 c a m : a n = a m -n , kui m > n kui D = 0; D x 0; D y 0, siis = 1 a 2 b2 c 2 ( a b) n = a n b n n 12. Ruutvõrrandi süsteemid a an 13. Kolmerealine determinant = n , kui b 0 b b 14. Kolme tundmatug
1. Kompleksarv kui reaalarvude paar. Tehted kompleksarvudega. Tehete omadused. Kompleksarvu algebraline kuju. Tuletatavad tehted ja nende omadused. Kompleksarvuks nimetatakse reaalarvude paari (x,y). C = {(x;y) | x, y R} Tehted kompleksarvudega: z1 = (x1; y1) C; z2 = (x2; y2) C 1. liitmine: z1 + z2 = (x1 + x2; y1 + y2) 2. korrutamine: z1 * z2 = (x1x2 - y1y2; x1y2 + x2y1) Kompleksarvudega tehete omadused 1. liitmine on kommutatiivne, st z1 + z2 = z2 + z1 z1, z2 C korral 2. liitmine on assotsiatiivne, st (z1 + z2) + z3 = z1 + (z2 + z3) z1, z2, z3 C korral 3. liitmise suhtes leidub nullelement (reaalarv 0, 0 + z = z + 0 = z z C korral), st leidub C, nii et z + = + z = z z korral; = (0; 0) = 0 4. igal kompleksarvul z = (x; y) = x + yi leidub (liitmise suhtes) vastandarv, st selline arv w C, et z + w = w + z = 0; w = -z 5. korrutamine on kommutatiivne, st z1z2 = z2z1 z1, z2 C korral 6. korrutamine on assotsiatiivne, st (z1z2)z3 = z1(z2z3) z1, z2, z3 C korral
KESKKOOLI MATEMAATIKA RAUDVARA 1. osa Andres Haavasalu dikteeritud konspekti järgi koostanud Viljar Veidenberg. 2003. aasta 1 Sisukord Sisukord........................................................................................................................................2 Arvuhulgad............................................................................................................................... 5 Naturaalarvude hulk N..........................................................................................................5 Negatiivsete täisarvude hulk z ...........................................................................................5 Täisarvude hulk Z.................................................................................................................5 Murdarvu
Teoreetiline informaatika Kordamisküsimuste vastused Eero Ringmäe 1. Hulkade spetsifitseerimine, tehted hulkadega, hulgateooria paradoksid. Hulk: Korteezh järjestatud lõplik hulk. Hulk mingi arv elemente, mille vahel on leitav seos klassifitseeritud elementide kogum. Hulk samalaadsete objektide järjestamata kogum. Hulga esitamine: elementide loeteluna A = {2;3;4} predikaadi abil A = {x | P(x)} Tühihulk on iga hulga osahulk. Iga hulk on iseenda osahulk. Hulga boleaan kõigi osahulkade hulk. H boleaan on 2H. 2H = {x | x on osahulgaks H-le}. Boleaani võimsus |2H| = 2|H| Tühja hulga boleaani võimsus on 1. Tehted: Hulkade võrdsus = A on B osahulk AND B on A osahulk. Ekvivalentsiseose definitsioon ((A => B) && (B => A)) hulgas sisaldavad samu elemente. Hulga osahulk võib võrduda hulgaga. Hulga pärisosahulk ei või võrduda. Hulkade ühend C = {x | x kuulub A &&
III Arvutused gaaside ja aurudega 1. Tühja anumasse, mille ruumala on 18,53 dm3, viidi O2. Gaasi rõhk anumas 13 oC juures oli 1,52 atm. Leida anumas oleva O2 mass. Lahendus: 13oC = (273+13) = 286K g 1 ,5 2 a tm * 1 8 ,5 3 d m 3 * 3 2 P *V *M m ol m (O 2 ) = = = 3 8 ,4 g R *T 3 a tm * d m 0 ,0 8 2 *2 8 6 K m o l* K 2. Antud on 5 liitrit kloori normaaltingimustel. Arvutada kloori maht ja mass -10 oC ja 870mmHg juures. Lahendus: Normaaltingimustel - P1=760mmHg, V1=5 L, T1=273K Antud tingimustel - P2=870mmHg, V2=?, T2=(-10+273)=263K
EESTI MEREAKADEEMIA RAKENDUSMEHAANIKA ÕPPETOOL MTA 5298 RAKENDUSMEHAANIKA LOENGUMATERJAL Koostanud: dotsent I. Penkov TALLINN 2010 EESSÕNA Selleks, et aru saada kuidas see või teine masin töötab, peab teadma millistest osadest see koosneb ning kuidas need osad mõjutavad teineteist. Selleks aga, et taolist masinat konstrueerida tuleb arvutada ka iga seesolevat detaili. Masinaelementide arvutusmeetodid põhinevad tugevusõpetuse printsiipides, kus vaadeldakse konstruktsioonide jäikust, tugevust ja stabiilsust. Tuuakse esile arvutamise põhihüpoteesid ning detailide deformatsioonide sõltuvuse väliskoormustest ja elastsusparameetritest. Detailide pinguse analüüs lubab optimeerida konstruktsiooni massi, mõõdu ja ökonoomsuse parameetrite kaudu. Masinate projekteerimisel omab suurt tähtsust detailide materjali õige valik. Masinaehitusel kasutatavate materjalide nomenklatuur täieneb pidevalt, rakendatakse efekti
163 Tugevusanalüüsi alused 11. DETAILIDE PAINDEDEFORMATSIOONID 11. DETAILIDE PAINDEDEFORMATSIOONID 11.1. Varda elastne joon Elastne joon = painutatud varda telje (ehk Elastse joone igat punkti neutraalkihi) kujutis peatasandil iseloomustavad selle läbipaine ja puutuja pöördenurk (Joon. 11.1): Läbipaine = varda elastse joone Pöördenurk = elastse joone puutuja (telje) siire telje ristsihis (vB) tõusunurk (B) Painutatud konsool Konsooli elastne joon
Matemaatiline anal¨ uu¨ s II 1. osa 1) Mitmemõõtmelise ruumi ja selle punkti mõisted. Kaugus mitmemõõtmelises ruumis. Kauguse omadused. Parameetrilised jooned. Mitmem~ o~ otmelise ruumi definitsioon. Hulka, mille elementideks on k~oik m reaalarvust koosnevad j¨arjestatud s¨ usteemid (a1 , a2 , . . . , am ), nimetatakse m- m~o~ otmeliseks ruumiks, s¨ usteemi A = (a1 , a2 , . . . , am ) selle ruumi punktiks ja arve a1 , a2 , . . . , am punkti A koordinaatideks. m-m~ o~ otmelist ruumi t¨ahistame umboliga Rm . s¨ Ruumi Rm punkte A = (a1 , a2 , . . . , am ) ja B = (b1 , b2 , . . . , bm ) nimetatakse v~ ordseteks ja kirjutatakse A = B, kui nende koordinaadid on v~ordsed, st a1 = b1 , a2 = b2 , . . . , am = bm . Nullpunktiks ehk koordinaatide alguspunktiks ruumis Rm nimetatakse punkti O = (0, 0, . . . , 0). Kaugus ruumis Rm . Olgu ruumis Rm antud kaks punkti A = (a1 , a2 ,
KOMBINATOORIKA 2 Kombinatoorika tegeleb üldiste meetodite ja valemite loomisega niisuguste ülesannete lahendamiseks, kus tuleb leida erinevate võimaluste arv mingis mõttes eristatavate hulkade moodustamiseks. Näiteks kui meil on vaja numbritest 1, 2, 3, 4, 5, 6, 7, 8, 9, 0 moodustada neljakohalisi naturaalarve, siis saame neid arve eristada selles esinevate kohtade arvu järgi, aga lisaks sellele veel selle järgi, kas selles neljakohalises arvus on korduvaid numbreid, kas selles võib esikohal olla number 0, kas numbrite erinev järjestus annab erineva arvu jne. Seega on ennekõike vaja ülesande teksti põhjal määrata ühendite arvu määramise eeskirjad. Ühendeiks nimetatakse mingeist esemeist ehk elementidest moodustatud rühmi, mis erinevad üksteisest kas elementide endi, nende järjestuse või arvu poolest. Niisugust üldist definitsiooni saab väga mitmel viisil täpsustada. Järgnevalt vaatleme kuut kõige olulisemat võimalust selleks ja esitame vastavate ühendite ar
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega. Näiteülesandeid d'Alembert'i printsiibi kohta võib lugeda ka E. Topnik' u õpikus ,,Insenerimehaanika ülesannetest IV. Analüütiline mehaanika", Tallinn 1999, näited 14-17, leheküljed 39-49. Kõikides variantides xy-tasapind on horisontaalne, xz- ja yz-tasapinnad aga on vertikaalsed. Andmetes toodud suurused 0 ja 0 on vastavalt pöördenurga ja
sin2 + cos2 = 1 tan = sin /cos 1+tan2 = 1/cos2 sin2 = 1 cos2 sin = tan *cos cos2 = 1/tan2 +1 cos2 = 1 sin2 cos = sin /tan cos2 1 = - sin2 cot = cos /sin cot =1/tan sin2 1 = - cos2 cos = cot *sin tan *cot =1 sin = cos /cot 1+cot2 = 1/sin2 sin = cos (90o ) sin = vastas kaatet/hüpotenuus cos = sin (90o ) cos = lähis kaatet/hüpotenuus tan = 1/tan (90o ) tan = vastas kaatet/lähis kaatet cot =tan (90o ) cot = lähis kaatet/vastas kaatet tan = cot (90o ) Kolmnurga pindala Koosinusteoreem Siinusteoreem S=a*h/2 a2=b2+c2-2bc*cos a/sin=b/sin=c/sin=2R S=1/2a*b*
Demos Pulk TEHNILINE ÜLESANNE 1 LINTKONVEIERI AJAM Õppeaines: Masinaelemendid Transporditeaduskond; Autotehnika Juhendaja: M. Tiidemann Õpperühm: AT42a Tallinn 2013 Leian ajami tööea: Lh = La·365·Ka·24 · Köp 8 Köp = 24 = 0,33 Lh = 3 · 365 · 0,85 · 24 · 0,33 = 7372 h Valime optimisteguri: Võtame keskmise kvaliteediga valmistamis- ja ekspluatatsioonitingimused: g = 0,5 Määran lintkonveieri nõutava võimsuse: Lindkonveieri nõutava võimsuse Ptm saan kui korrutan lindi veojõu ja lindi kiiruse: Ptm = F·v = 1,5· 103· 2,1 = 3,15 kW Määran ajami kasuteguri: = kü · lü · s · vl2 · ll2 · tm kus kü = kinnise ülekande kasutegur lü = lahtise ü
Tallinna Tehnikaülikool Ehitiste projekteerimise instituut Kursuseprojekt aines "RAUDBETOONKONSTRUKTSIOONID. PROJEKT" Üliõpilane: S. Avdejev Matr. nr.: 000342 Juhendaja: J. Pello Esitatud: Arvestatud: Tallinn 2004 sisukord 1. LÄHTEÜLESANNE.................................................................................. 2 2. PLAADI ARVUTUS.................................................................................. 3 2.1. Koormused plaadile.........................................................................3 2.2. Plaadi sisejõud................................................................................ 3 2.3. Armatuuri dimensioneerimine..........................................