Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 2 Pöördpendli modelleerimine ja juhtimine. Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed X0 = [-0.1; 0; 0; 0] - algolek Xs = [0; 0; 0,7; 0] seadesuurus X(t) - olek A = 0 1 0 0; 17.64 0 0 0; 0 0 0 1; -0.784 0 0 0 ] B = [0; -0.3333; 0; 0.2] C=eyes(4) D=zeros(4,2) G = [0; 0; 0; 0] - olekuhäiringu sisendmaatriks M= 5 - mass
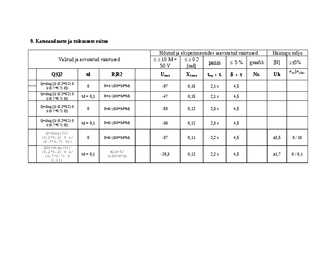
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut ANTENNI ASENDI (NURGA) JUHTIMINE KODUNE TÖÖ NR 1 aines "Automaatjuhtimissüsteemid" Miko Allikmäe 061643IASB IASB51 Juhendaja:Eduard Petlenkov Esitatud: 26.10.2008 Kaitstud: Õppejõud: Tallinn 2008 Tähistuste selgitused X(t) antenni nurk [rad] X2 antenni nurga muutumise kiirus [rad/s] X2max maksimaalne lubatud antenni nurga muutumise kiirus [rad/s] J kõikide keerlevate osade inertsmoment [kg*m2] Bs igasuguste sumbumiste summaarne koefitsient [kg*m2/s2] M mootori poolt arendatav moment [kg*m2/s], M=k*U(t) Md=Xh tu
Tallinna Tehnikaülikool Automaatjuhtimissüsteemid, ISS0021 Labor nr. 1 Antenni mudel Rain Jõearu 040737 IASB Tallinn 2008 1. Mudeli lähteandmed [X1]- antenni nurk [rad] '[X2] - antenni nurga muutumise kiirus J - kõikide keerlevate osade inertsmoment [kg*m2] J = 20 Bs - igasuguste sumbumiste summaarne koefitsient [kg*m2/s] Bs = 16 M - mootori poolt arendatav moment [kg*m2/s2], M = k*U(t)
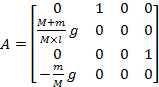
Praktikum II Pöördpendel liikuval alusel ja süsteemi stabiliseerimine tagasisidega 1.Pöördpendli lihtsustatud mudel (vt demoks nt https://youtu.be/bENXhqIPkBs ) m l x F M Olekumudeli muutujad ja parameetrid: - pendli nurk [rad] x aluskäru asend [m] M aluskäru mass [kg] m pendli varda mass [kg] l - kaugus pendli varda raskuskeskmeni [m]
TALLINNA TEHNIKAÜLIKOOL Automaatikainstituut BORIS GORDON, EDUARD PETLENKOV ISS0010 SÜSTEEMITEOORIA ÜLESANNETE KOGU 2007 Parandatud 2009 Kaane kujundanud Ann Gornischeff Autoriõigus: B. Gordon, E. Petlenkov, 2007 ISBN 978-9985-59-688-3 2 EESSÕNA Käesolev ülesannete kogu on mõeldud kasutamiseks abimaterjalina õppeaines ISS0010 Süsteemiteooria. Kogu täiendab Hanno Sillamaa õpikut "Süsteemiteooria", millel on olnud juba neli trükki. Iga peatüki alguses on toodud viide selle õpiku (Hanno Sillamaa. Süsteemiteooria, TTÜ kirjastus) vastavatele teoreetilistele peatükkidele. Kui selles õpikus vastavat materjali ei ole, siis on antud viide teisele raamatule (K. Ogata. Modern control engineering, 2002). Ülesannete kogu on kasutamiseks nii harjutustundides, kontrolltöödeks ja eksamiteks etteval- mistamisel kui ka kursuse iseseisval läbimisel. See sisaldab ülesandeid põhiliste teoreetilise kursuse käigus
3 1 Tehisnärvivõrgud (artificial neural networks, ) Tänapäeval üks populaarsemaid mõisteid juhtimisteoorias on Närvivõrk. Vaatleme mis on närvivõrk, millest võrk koosneb, kuidas seda kasutada ja missugused praktilised ülesanded võivad olla lahendatud nende abil. Tehisnärvivõrk on väga lihtsustatud bioloogilise närvivõrgu mudel. Tema tööalgoritmid on ka tulnud bioloogiliste närvivõrkude tööprintsiibist. 1.1 Bioloogiline neuron ja bioloogilised närvivõrgud Inimese aju on väga keeruline ja võimas süsteem. Ta on võimeline mõtlema, mäletama, ja lahendama probleemi. Seepärast teda tööd katsetakse simuleerida arvuti mudeli abil. Aju koosneb omavahel seotud rakkudest neuronitest. Bioloogiline neuron (joonis 1.1) on lihtne andmeid töötlev süsteem. Ta saab informatsiooni
3 1 Tehisnärvivõrgud (artificial neural networks, ) Tänapäeval üks populaarsemaid mõisteid juhtimisteoorias on Närvivõrk. Vaatleme mis on närvivõrk, millest võrk koosneb, kuidas seda kasutada ja missugused praktilised ülesanded võivad olla lahendatud nende abil. Tehisnärvivõrk on väga lihtsustatud bioloogilise närvivõrgu mudel. Tema tööalgoritmid on ka tulnud bioloogiliste närvivõrkude tööprintsiibist. 1.1 Bioloogiline neuron ja bioloogilised närvivõrgud Inimese aju on väga keeruline ja võimas süsteem. Ta on võimeline mõtlema, mäletama, ja lahendama probleemi. Seepärast teda tööd katsetakse simuleerida arvuti mudeli abil. Aju koosneb omavahel seotud rakkudest neuronitest. Bioloogiline neuron (joonis 1.1) on lihtne andmeid töötlev süsteem. Ta saab informatsiooni
___.___ .. Mathcad 6.0 Plus 2001 2 621.391.2(07) .. : - Mathcad 6.0 Plus. , - , 2001. 189. : , , - - . Mathcad 6.0 Plus. . " - " , . . 2. . 155. .: 14 . .. , . . , . 3 1. 1.1. 1.1.1. -- x(t) = x(t+mT), T -- , m - - , m= 1, 2, .... x(t) - x(t ) = a 0 + (a k cos k1 t + b k sin k1 t ) =a 0 + A k cos(k1t + k ) (1.1) k =1 k =1 1 = 2 -- 1- ; a 0 , a k b k -- T , : t +T t +T t +T 1 2 2 a






























Kõik kommentaarid