Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Harjutusülesannete aruanne õppeaines Automaatjuhtimise alused Üliõpilane: Matrikli nr.: Õpperühm: AAAB-41 Juhendaja: Taavi Möller Tallinn 2013 1. Lineaarsete süsteemide tüüplülid Eesmärgiks on tutvuda integreerimis-, aperioodilise- ja võnkelüliga. 1.1
Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Harjutusülesannete aruanne õppeaines Automaatjuhtimise alused Üliõpilane: Matrikli nr.: Õpperühm: AAAB-41 Juhendaja: Taavi Möller Tallinn 2013
Tallinna Tehnikaülikool Elektrotehnika instituut Mootori analüüs Õppeaines Automaatjuhtimise alused Üliõpilane: Matrikli nr: Õpperühm: Juhendajad: Tallinn 2015 Sisukord 2 Mootori andmed............................................
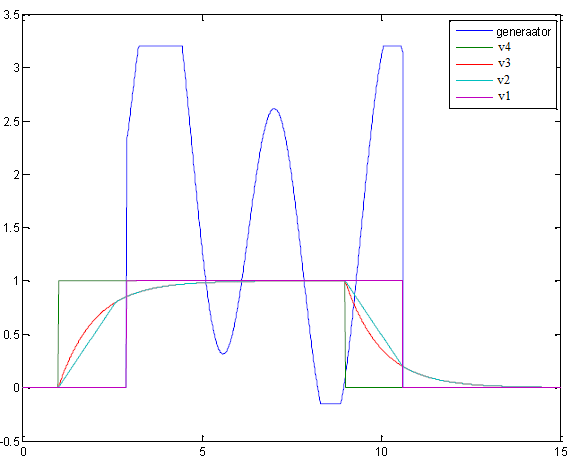
Tallinna Tehnikaülikool Elektriajamite ja Jõuelektroonika Instituut Automaatjuhtimine Tunni tööde aruanded Õpilane Juhendajad: Tõnu Lehtla Rainer Kährik Tallinn 2008 Lineaarsete süsteemide tüüplülid Töö eesmärk: Tutvuda integreerimis-, võnke- ning aperioodilise lüliga alljärgneva kava alusel. Integreerimislüli: 1)Teoreetiline ülevaade: Integreerimislüli nimetatakse ka astaatiliseks lüliks ning I-lüliks. Ideaalne integreerimislüli väljundsignaal kasvab (või kahaneb pidevalt püsiva kiirusega, kui xs 0 ja on konstantne. Kiiruse määrab hüppe suurus sisendil. Reaalsel integreerimislüli (kirjeldatav IT1-lüliga) on väljundsignaali kasvamiskiirus alghetkel null ja tõuseb pikkamööda lõpliku kiiruseni. · Diferentsiaalvõrrand: v (t)=Ku (t) · Ülekandefunktsioon:
2. Põhimõisted automaatreguleerimissüsteemide (ARS) alalt Reguleerimise all mõistetakse toimingut, mille eesmärgiks on teatava parameetri soovitava väärtuse tagamine. 1. käsitsi, 2. automaatreguleerimine Reguleerimise objekt on tehniline seade, millel viiakse läbi automaatreguleerimist (aurukatel, auruturbiin, soojusvaheti, soojussõlm) Automaatreguleerimissüsteem (ARS) koosneb: 1. reguleerimisobjektist: 2. automatregulaatorist (AR) AUTOMAATJUHTIMISE STRUKTUURSKEEM, g(t) Xh(t) ARS sisend XR(t) Xob(t) Seadur Automaatregulaator Reguleerimisobjekt (t) AR Tagasiside 1 RO RO tööd iseloomustatakse reguleeritava suuruse hetkväärtusega (t) aeg
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Komp
Sissejuhatus. Automaatika süsteeme kasutatakse tootmisprotsessis, kus ta kõrvaldab inimese osavõtu selles protsessis ja võimaldab teostada selliseid protsesse mis on inimesele kahjulikud. Automaatika süsteemi kuuluvad automaat kontrollimine ja automaat reguleerimine. Esimene neist teostab mõõtmisi ja teine teostab reguleerimist e. parameetri hoidmist kindlal tasemel või parameetri hoidmist kindlal tasemel reguleerimisprogrammi järgi. Automaatika süsteemi nimetatakse automatiseerimiseks see võib olla osaline näiteks üks tööpink või tööliin või tsehh ja samuti võib esineda täielik automatiseerimine, sel juhul automatiseeritakse mitu tehnoloogilist protsessi mis on oma vahel seotud. Kompleks automatiseerimine on sel juhul, kui automatiseeritakse juhtimisprotsessid. Seadmete sõlmede kogum mis võimaldab teostada automatiseerimist nimetatakse automaatika süsteemiks. Nad võimaldavad mehhanismide ja seadmete automaatset käivitust, reversee
Skeemitehnika. SS-98. 1. M.Tooley “Everyday electronics data book” 2. Hessin “Impulsstehnika” 3. Horowits “The art of electronics” Skeemitehnika põhilised mõõtühikud Nimetus Tähistus Sümbol Kirjeldus Amper A I Voolutugevus juhtmes on 1A, kui juhtme ristlõiget läbib elektrilaeng 1 kulon 1. sekundi jooksul Kulon C Q Elektrilise laengu ühik e. Elektrihulk Farad F C Mahtuvus on 1F, kui potensiaalide vahe 1V tekitab mahtuvuse elektroodidel laengu. Henry H L Induktiivsus on 1H, kui voolumuutus kiirusega 1A sekundis tekitab induktiivsusel pinge 1V. Jaul J E Energiaühik. Oom R Takistuseühik. Siemens S G Juhtivuseühik. Sekund s t Ajaühik.









































Kõik kommentaarid