Tallinna Tehnikaülikool Füüsikainstituut Üliõpilane: Natalia Novak Teostatud: Õpperühm: YAMB11 Kaitstud: Töö nr: 12B TO: NIHKEMOODUL Töö eesmärk: Töövahendid: Traadi nihkemooduli määramine Keerdpendel lisaraskusega, nihik, kruvik, keerdvõnkumisest. ajamõõtja, tehnilised kaalud. Skeem 1. Töö teoreetilised alused Olgu rakendatud risttahuka pealmisele pinnale sellega paralleelne ja igale pinnaelemendile ühtlaselt F
TALLINNA TEHNIKAÜLIKOOL Füüsikainstituut Üliõpilane: Teostatud: Õpperühm: Kaitstud: Töö nr. 12 OT: Nihkemoodul Töö eesmärk: Töövahendid: Traadi nihkemooduli määramine Keerdpendel lisaraskusega, nihik, kruvik, keerdvõnkumisest. ajamõõtja, tehnilised kaalud Skeem l Töö teoreetilised alused Olgu rakendatud risttahuka pealmisele pinnale sellega paralleelne ja igale pinnaelemendile ühtlaselt mõjuv jõud F
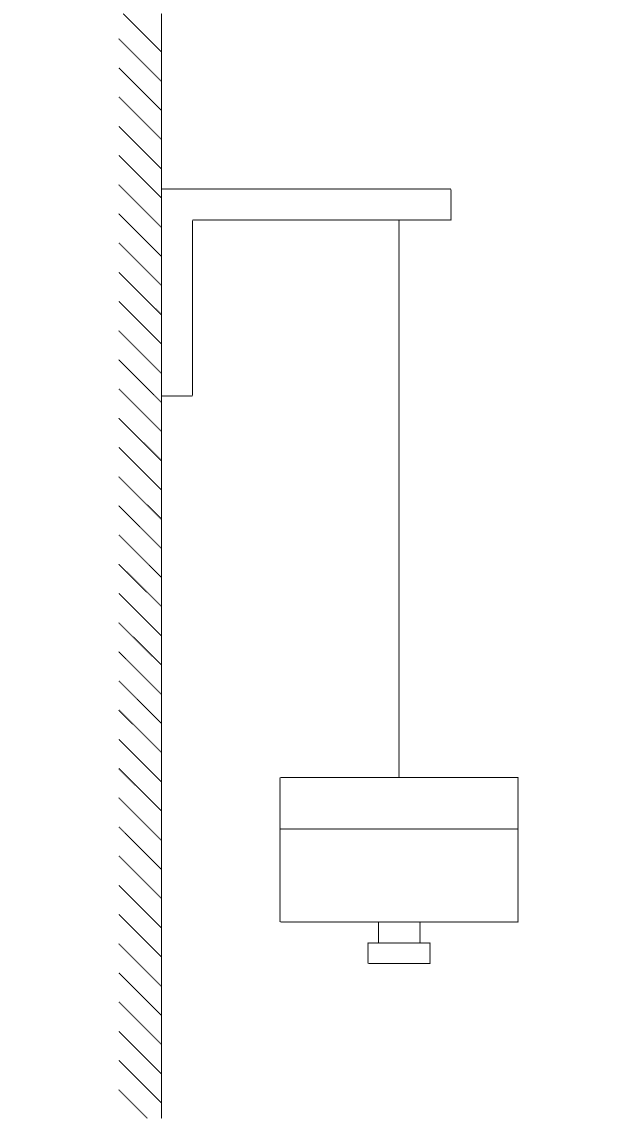
Tallinna Tehnikaülikooli füüsika instituut Üliõpilane: Üllar Alev Teostatud: 18.10.06 Õpperühm: EAEI11 Kaitstud: Töö nr. 12b OT Nihkemoodul Töö eesmärk: Töövahendid: Traadi nihkemooduli määramine Keerdpendel lisaraskusega, nihik, kruvik, keerdvõnkumisest. ajamõõtja, tehnilised kaalud. Skeem Töö käik. 1. Määrake traadi raadius r. Selleks mõõtke traadi läbimõõt d kruvikuga kolmest kohast (igast kohast kahes ristsihis). Traadi pikkus l on antud töökohal. Tulemused kandke tabelisse. L = .......... ±...........
Samaaegselt suhtelise pikenemisega või suhtelise survega,toimub suhteline kokkutõmbumine või suhteline paisumine.Kui ristlõike mõõde on d,tema muut d,siis ristlõike mõõtme suhtelise muut on avadatav järgmiselt '=d/d Suhteline pikideformatsioon ja suhteline ristlõike mõõtme deformatsioon on omavahel seotud Poissoni teguriga: = '/ Poissoni tegur on võrdetegur,mis iseloomustab ainult materjali omadusi. 1.4.2.Tangensiaalpinge ja nihkemoodul Eraldame deformeeritavast materjalis mõttelise kuubi ning käsitleme nihkedeformatsiooni, kui vastastahkude suhtelist nihet y , mis võrdub nihkenurga tangensiga... Nihkedeformatsiooni puhul on tegemist tangensiaalpingega t, mis on võrdne tahu puutuja sihilise jõuga f, pindalaühiku kohta, deformeerunud kehas. Isotroopse materjali, see tähendab sellise materjali, mille omadused on kõikides sihtides õhesugused, puhul jaotub pinge kogu kehas ühtlaselt.
siseenergia on jääv. ristlõike mõõtme deformatsioon on omavahel seotud Poissoni teguriga: Erirelatiivsusteoorias seotakse (seisu)energia ja (seisu)massi jäävuse seadus üheks. Seda ='/ Poissoni tegur on võrdetegur,mis iseloomustab ainult materjali omadusi. 1.5.Võnkumised 1.4.2.Tangensiaalpinge ja nihkemoodul 1.5.1.Harmoonilised võnkumised Eraldame deformeeritavast materjalis mõttelise kuubi ning käsitleme Harmooniliseks nimetatakse võnkumist, mis on nihkedeformatsiooni, kui vastastahkude sumbumatu ja milles võnkuv suurus muutub suhtelist nihet y , mis võrdub nihkenurga ajas sinusoidaalse (harmoonilise) tangensiga... seaduspärasuse järgi.
Samaaegselt suhtelise pikenemisega või suhtelise survega,toimub suhteline kokkutõmbumine või suhteline paisumine.Kui ristlõike mõõde on d,tema muut d,siis ristlõike mõõtme suhtelise muut on avadatav järgmiselt '=d/d Suhteline pikideformatsioon ja suhteline ristlõike mõõtme deformatsioon on omavahel seotud Poissoni teguriga: ='/ Poissoni tegur on võrdetegur,mis iseloomustab ainult materjali omadusi. 1.4.2.Tangensiaalpinge ja nihkemoodul Tangensiaalpinge Nihkemoodul- G =f(-all)/S G=/y=/tan 1.4.3.Vääne ja väändemoodul(f) f=M/ f= Gr ^4/2l (joonpaisumistegur)= l/l T (1/deg) (ruumpaisumistegur)=3 1.5.Võnkumised 1.5.1.Harmoonilised võnkumised · Süsteemi vabad ehk omavõnkumised toimuvad ilma väliste jõudude mõjuta · Masspunkti või jäiga keha hälve tasakaalu asendist sõltub ajast siinus-või koosinusfunktsiooni järgi
Füüsika kordamisküsimused 1. JÄIGA KEHA MEHHAANIKA 1.1. Kinemaatika 1.1.1. Inertsiaalne taustsüsteem: Liikumise kirjeldamine ajas ja ruumis. Keha asukoht ruumis- taustsüsteemide suhtes. Jäik keha millel arvestatavad deformatsioonid puuduvad. Masspunktiks nimetatakse keha, mille mõõtmed võime arvestamatta jätta võrreldes kaugusega teiste kehadeni. 1) a + b summa 2) a - b vahe 3) a jab korrutis a *b =a * b * sin 4) a * b = a * b * cos skalaarkorrutis Taustsüsteemi, milles kehtib Newtoni I seadus, nimetatakse inertsiaalseks. Iga taustsüsteemi, mis liigub inertsiaalse suhtes ühtlaselt ja sirgjooneliselt, nimetatakse samuti inertsiaalseks. Üleminek ühelt in
u' z 1 - 2 uz 1 - 2 c c u z = u' z = vu ' vu 1 + 2x 1 - 2x c c Füüsika II kt Töö Oletame, et mingil traj liikuvale kehale mõjub jõud F ning see keha läbib teepikkuse s. F kas muudab keha kiirust, tekitades kiirenduse või kompenseerib mõne teise liikumist takistava jõu mõju. Jõu F mõju teel pikkusega s nim. tööks. Töö on skalaarne suurus, mis võrdub jõu rakenduspunkti poolt läbitud teepikkuse s korrutisega selle jõu liikumisesuunalise projektsiooniga- A = Fs s





















Kõik kommentaarid