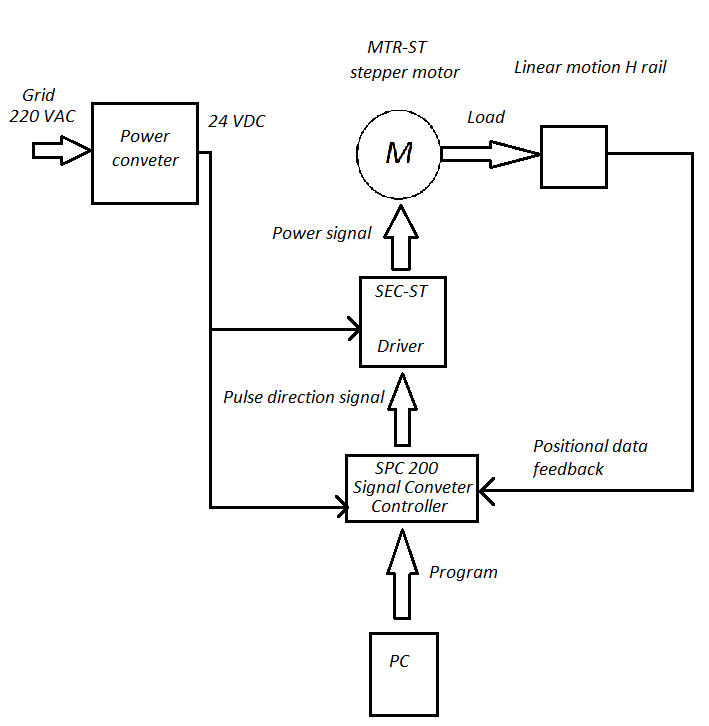
Tallinn University of Technology Department of Electrical Engineering Report on laboratory work 3 on General Course of Electrical Drive SERVO DRIVE (FESTO) Jüri Lina 666BMW Group M16 Variant 2 Tallinn 2014 1. Functional Diagram Component list: PC with Wmmemoc software SEC-AC-305 controller MTR-AC-55 servo motor with encoder External 24VDC power supply unit Test stand with slide and limit switches 4. Tables of observations Task Operation/Record Observation 1 Measure the slide position at Limit Slide moved to the right, switch 1 Limit 1 reached at 1,46 2 Turn potentiometer slowly counter- Slide sta
Analog Interfacing to Embedded Microprocessors Real World Design Analog Interfacing to Embedded Microprocessors Real World Design Stuart Ball Boston Oxford Auckland Johannesburg Melbourne New Delhi Newnes is an imprint of Butterworth–Heinemann. Copyright © 2001 by Butterworth–Heinemann A member of the Reed Elsevier group All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. Recognizing the importance of preserving what has been written, Butterworth–Heinemann prints its books on acid-free paper whenever possible. Library of Congress Cataloging-in-Publication Data Ball, Stuart R., 1956– Analog interfacing to embedded microprocessors : real world design / Stuart Ball. p. cm. ISBN 0-7506-7339-7 (pbk. : alk. paper) 1. Embedded computer
1·1 Chapter 1 Routine maintenance and servicing 1 Contents Air cleaner element renewal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Fuel filter renewal - fuel injection engines . . . . . . . . . . . . . . . . . . . .36 Alternator drivebelt check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20 Hinge and lock check and lubrication . . . . . . . . . . . . . . . . . . . . . . .31 Automatic transmission fluid level check . . . . . . . . . . . . . . . . . . . . .27 Idle speed and mixture adjustment . . . . .
[email protected] 06 Aug 2018 FITNESS IN SOCCER THE SCIENCE AND PRACTICAL APPLICATION Jan Van Winckel, Werner Helsen, Kenny McMillan, David Tenney, Jean-Pierre Meert, Paul Bradley [email protected] 06 Aug 2018 Isbn-number : 9789082132304 Publisher: Moveo Ergo Sum / Klein-Gelmen Proofreading: Jim Newall Quill Content |Writing, Editing and Web site services http://www.quillsites.co.uk Photos: Jean Leemans and Etienne Claessens Cover and lay-out: Dots & Bits © 2014 Jan Van Winckel Printed and bound at Manipal Technologies Ltd., India All rights reserved. No pa
different uses - even though that inevitably means that it will do no single thing particularly well. In these areas will we find the latitude for “improving” an engine, and one should always be mindful that the real task is simply to tailor a mass-use product to a very specific application- and that in the tailoring process one inevitably will incur all the various expenses the engine's designer has avoided. Hours of labor may be required to finish rough-cast ports; dollars will be spent correcting other things that are the creatures of manufacturing economies; power added at maximum revs will be power subtracted at lower crankshaft speeds, while the increased speeds required to obtain large improvements in power output will be paid for in terms of reliability. 1 Two Stroke TUNER’S HANDBOOK Another mistake commonly made, sometimes even by those who have enjoyed
PRAISE FOR The 4-Hour Workweek "This is a whole new ball game. Highly recommended." --Dr. Stewart D. Friedman, adviser to Jack Welch and former director of the Work/Life Integration Program at the Wharton School, University of Pennsylvania "It's about time this book was written. It is a long-overdue manifesto for the mobile lifestyle, and Tim Ferriss is the ideal ambassador. This will be huge." --Jack Can eld, cocreator of Chicken Soup for the Soul®, 100+ million copies sold "Stunning and amazing. From mini-retirements to outsourcing your life, it's all here. Whether you're a wage slave or a Fortune 500 CEO, this book will change your life!" --Phil Town, New York Times bestselling author of Rule #1 "The 4-Hour Workweek is a new way of solving a very old problem: just how can we work to live and prevent our lives from being all about work? A world of in nite options awaits those who would read this book an
Cat. No. W317-E1-11 SYSMAC CPM1A Programmable Controllers OPERATION MANUAL CPM1A Programmable Controllers Operation Manual Revised October 2007 iv Notice: OMRON products are manufactured for use according to proper procedures by a qualified operator and only for the purposes described in this manual. The following conventions are used to indicate and classify precautions in this manual. Always heed the information provided with them. Failure to heed precautions can result in injury to people or dam- age to property. ! DANGER Indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury. Additionally, there may be severe property damage. ! WARNING Indicates a potentially hazardous situation which, if not avoided, could result in death or serious inju
tutvu lausearvutuse keskkonnaga: http://logik.phl.univie.ac.at/~chris/gateway/formular-uk-zentral.html Millistel muutuja väärtustel on lause (Av(B&A))v(-A&(Cv(B&-C))) väär? Panna tuleb results only, 0 on väär 1 on õige Tutvu ajalooga saidis kuni II maailmasõda: http://www.maxmon.com/history.htm Loe läbi jutt ja proovi andmetega mängida: http://math.hws.edu/TMCM/java/DataReps/index.html Kahend süsteemi arvu(101101001) ->kümnend süsteemiks. Nr sisse ja bianarile punkt, ja vaatan base ten integeri kümnendarvudest annab Ecki appletis juuresoleva graafilise kujutise, teen kujundi ja vaatan base integeri mis vastab kahendsüsteemi arvule 1110001 ASCII tabelis? Nr sisse ja punkt bianari, vaatan ...teksti Kümnendsüsteemi arv 33 on kahendsüsteemis? 33 kirjutan ja Base-ten integer, vaatan bianary Loe läbi jutud Atbashi ja Caesari šifri (Caesar cipher) kohta: http://www.wikipedia.org 2 Tutvu ajalooga kuni 1970ndad: http://www.islandnet.com/~kpolsson/comphist/ 47-68 ingli























Kõik kommentaarid