1. Ristkoordinaadid- kui ruumis on antud ristkordinaadisüsteem, siis ruumi iga punkt P on üheselt määratud ristkordinaatidega x,y,z, kus x on punkti P ristprojektsioon absissteljele, y on punkti P ristprojektsioon ordinaattelele ja z on punkti P ristprojektsioon aplikaattelele P(x,y,z) 2. Kahe punkti vaheline kaugus- Kui P1(x1,y1,z1), P2(x2,y2,z2) on ruumi punktid siis kaugus d punktide P1 ja P2 vahel on määratud valemiga √ 2 2 d= ( x 2−x 1 ) + ( y 2− y 1 ) + ( z 2 + z 1) 2 3. Vektori mõiste-Vektor on suunatud lõik millel on kindel algus- ja lõpp-punkt. 4. Nullvektor-Vektorit, mille pikkus on null, nimetatakse nullvektoriks ja tähistatakse sümboliga . Nullvektori suund on määramata. 5. Ühikvektor- Kui vektori pikkus on 1 6. vektorite liitmine-rööpkülikureegel: Vektorite a ja b summaks nimetatakse niisugust v...
1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega: Maatriksi järk tähistab maatriksi mõõtmeid: A on m*n järku maatriks. Liigid: · Ruutmaatriks (m=n) · Diagonaalmaatriks ruutmaatriks, mille peadiagonaalis arvud, muud elemendid 0-d. · Ühikmaatriks diagonaalmaatriksi erijuht. Peadiagonaali elemendid 1-d. Täh E. · Nullmaatriks kõik nullid. Täh . 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). · Korrutamine arvuga: korrutades maatriksit reaalarvuga, muutuvad kõik elemendid, selle arvu korra suuremaks. · Maatriksite liitmine: mõõtmed peavad olema samad. Ühemaatriksi elemendid liidetakse teise maatriksi vastavate elementidega: A = (a ij) ja B = (bij) A+B =(cij) kus cij =...
Mata eksami kordamisküsimused 1. Determenandi põhiomadused. Alam D ja minoor. Crameri meetodil võrrandsüsteemi lahendamine · Determinant ei muutu, kui tema read ja veerud ümber paigutada. See omadus väljendab determinantideridade ja veergude samaväärsust. · Kui determinandis kaks rida omavahel ümber paigutada, siis muutub determinandi märk vastupidiseks. · Determinandi mingi rea kõigi elementide korrutamisel ühe ja sama teguriga korrutub kogu determinant selle teguriga. See omadus võimaldab D-i rea või veeru elementide ühist tegurit D-i märgi ette tuua, mis harilikult lihtsab tunduvalt arvutusi. · Kui D-s on kaks rida omavahel võrdsad, siis D võrdub nulliga. Seega on eelmise omaduse tõttu D võrdne nulliga ka siis kui D-i kaks rida on võrdelised. · Kui D-s mingi rea iga element kujutab kahhe liidetava summa siis laguneb D kahe sama järku D- i summaks, kui es...
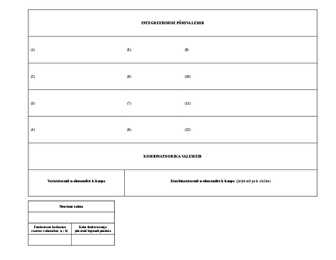
INTEGREERIMISE PÕHIVALEMID (1) (5) (9) (2) (6) (10) (3) (7) (11) (4) (8) (12) KOMBINATOORIKA VALEMEID Variatsioonid n-elemendist k-kaupa Kombinatsioonid n-elemendist k-kaupa (järjekord pole oluline) Newtoni valem Funktsiooni keskmine Kahe funktsiooniga väärtus vahemikus [a ; b] piiratud kujundi pindala Lineaarne 1. järku DV DIFERENTSIAALVÕRRANDID ...
Lineaarkujutiseks nimetatakse kahe vektorruumi V ja W vahel olevat kujutist, kui on rahuldatud tingimus: f(*a+*b)=*f(a)+*f(b). Järeldused: 1) ==1, f(a+b)=f(a)+f(b) aditiivsus 2) =0 f(*a)= *f(a) homogeensus 3) =0, =0; f=0vektor (0V, 0W) Vektorruumi V korral määratud lineaarkujutust f nimetatakse selle vektorruumi V lineaarteisenduseks. Lineaarteisenduse liigid: vektori lüke, pööre, peegeldamine sirgest, korrutamine arvuga. Lineaarkujutuse vektorruumiks L nimetatakse vektorruumi, kui on rahuldatud järgnevad tingimused: Lineaarkujutust võib korrutada arvuga a*f Def: lineaarkujutise distributiivsus (f+g)*(a)=f(a)+f(g) Def: (*f)*(a)=*f(a) Öeldakse, et kujutused f ja g on võrdsed, kui on rahuldatud võrdus f(a)=g(a) f=g f+g=g+f kommutatiivsus (f+g)+h=f+(g+h) assotsiatiivsus f+=f nullkujutis f+(-f)= vastandkujutis Geomeetrilises mõttes pakuvad huvi need vektorid, mis säilitavad oma sihi teatava lineaarteisenduse korral. f(x)=*x vek...
ANALÜÜTILINE GEOMEETRIA RUUMIS, VEKTORID VEKTORI MÕISTE, MOODUL JA SUUND Neid suurusi, mida on võimalik iseloomustada ühe arvuga, nimetatakse skalaarseteks (temperatuur, mass, töö). Suurusi, mille iseloomustamiseks on vaja arvu ja suunda, nimetatakse vektoriaalseteks (jõud, kiirus, kiirendus). Definitsioon. (Geomeetriliseks) vektoriks nimetatakse suunatud sirglõiku, lõiku, millel tehakse vahet alguse ja lõpu vahel. Kui vektori algus on punktis A ja lõpp punktis B, siis tähistatakse AB , a . Vektor on kindla sihi, suuna ja pikkusega lõik. Siht on teda kandva sirge siht. Suund on alguspunktist lõpp-punkti poole. Definitsioon. Vektori mooduliks nimetatakse tema pikkust, see on lõigu AB pikkust ja tähistatakse AB AB , a a . Vektori moodul on skalaarne mittenegatiivne suurus. Definitsioon. Nullvektoriks nimetatakse vektorit, mille algus- ja lõp...
Olgu hulgad V ja W vektorruumid siis 2 vektorruumi korral määratud kujutust f:VW nimetatakse lineaarkujutuseks kui ta rahuldab tingimust f(·a+·b)= ·f(a) + ·f(b) J: = =1 f(a+b)=f(a)+f(b) J2: =0 f(·a)= ·f(a) J3: = =0 f(0)=0. Vektorruumi V korral määratud lineaarkujutlust f:VV nim selle vektorruumi V lineaarteisenduseks (ehk kujutusest vektorruumist V iseendasse tagasi. 1º leidub või eksisteerib vähemalt üks punkt. 2º igale kahele kindlas järjekorras võetud punktide paarile (A;B) on vastavusse seatud parajasti üks vektor AB. 3º iga punkti A ja iga vektori a korral eksisteerib parajasti üks B nii et punktidele A ja B vastab vektor a. 4º rööpküliku aksioom, kui vektor AB on võrdne vektoriga CD siis AC on võrdne BD'ga. J1: AC=BD a+b=b+a. J2: AD=BD+AB a+(b+c)=(a+b)+c. J3: BB=0 a=a+0. J4: BA=(-a) a+(-a)=0 1* igale paarile (,a) on vastavusse seatud parajasti üks vektor a. 2* (+)a= a+ a. 3* (a)=( )a. 4* (a+b)= a+ b. 5* 1 ·a=a. J5: =a(a)= · a....
Crameri peajuhtumi korral Maatriksite jagamisest ei saa on suunatud lõik. Tehted avalduvad lin. Võrrandi süsteemi rääkida! vektoritega: Summa, vahe, tundmatud murdudena, mille 1. Maatriksi astak, selle korrutamine skalaariga (arvuga) nimetajates on süsteemi maatriks leidmine. Näide Koordinaatidega antud vektorid, determinant , lugejas maatriks kus Kui maatriksis leidub vähemalt tehted nendega Olgu antud tundmatute veerg on asendatud üks nullist erinev r –järku miinor, vektorid a1, a2, ..., ak. Siis iga vabaliikmetega, determinant. kuid mitte ühtegi nullist Erinevat vektorit b kujul b _ a1a1 _ a2a2 Determinantide omadused, kõrgemat järku miinorit, siis _. . ._akak, kus a1, a2, . . . , ak on determinandi arendus rea (veeru) ...
Kompleksarvud Kompleksarvu mõiste. Kompleksarve on kombeks tähistada väikese tähega z. Kompleksarvudel on mitmeid esitusviise ehk kujusid. Kõige levinum on kompleksarvu algebraline kuju. Def Kompleksarvuks (algebralisel kujul) nimetatakse arvu z = a + ib, kus a ja b on reaalarvud ja i on imaginaar ühik. Imaginaarühik, mida tähistatakse i, defi'kse võrdusega i2 = -1.Kõigi kompleksarvude hulka tähistatakse C. Def Kompleksarvu z = a + ib C korral nim arvu a R selle kompleksarvu reaalosax ja arvu b R nim selle kompleksarvu imaginaarosaks. Kaks kompleksarvu on võrdsed parajasti siis, kui 1) on võrdsed nende reaalosad, 2) on võrdsed nende imaginaarosad. Algebraline kuju on kompleksarvu kujudest kõige levinum. Kuid on ka teisi esitusviise. Kompleksarve nim arvudex, sest nendega saab sooritada aritmeetilisi tehteid: liitmist, lahutamist, korrutamist, jagamist. Komar liitmine ja lahutamine on kõige otstarbekam teha algebralisel kujul. Def. Ko...
Eksami kordamisküsimused Lineaaralgebra ja analüütiline geomeetria (2015- 2016 aasta sügis) Ristkoordinaadid. Kui ruumis on antud ristkoordinaadisüsteem, siis ruumi iga punkt P on üheselt määrastud ristkoordinaatidega x, y, z, kus x on punkti P ristprojektsioon abstsissteljele, y on punkti P ristprojektsioon ordinaatteljele ja z on punkti P ristprojektsioon aplikaateljele. Kirjutame P(x, y, z). Kahe punkti vaheline kaugus. Kui P1(x1, y1, z1), P2(x2, y2, z2) on ruumi punktid, siis kaugus d punktide P1 ja P2 vahel on määratud valemiga Vektori mõiste Vektor on suunatud lõik alguspunktiga punktis A ja lõpp-punktiga punktis B. Nullvektor Eukleidilises ruumis (näiteks tasandil) on nullvektoriks määramata suunaga vektor, mille pikkus on null. Ühikvektor Kui vektori pikkus on 1, siis teda nimetatakse ühikvektoriks. Vektorite liitmine ja lahutamine Lahutamine toimub sama põhimõtte järgi. Reaalarvu ja vektori korrutis. Vektori pikk...
Kõrgem matemaatika 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks ristkülikukujuline arvudega tabel, milles on m-rida ja n-veergu. Tähistused: (maatriksit tähistatakse suure tähega) a11 a12 ... a1n a 21 a 22 ... a2n i =1,2,..., m = A( aij ), ... ... ... ... j =1,2,..., n a m1 am2 ... a mn Maatriksi järk tähistab maatriksi môôtmeid; A on m*n järku maatriks. Maatriksi liigid: 1) Ruutmaatriks: m=n; 2) Diagonaalmaatriks: a11, a22, amm - peadiagonaal (diagonaalil ei ole 0; muud elemendid 0-d); 3) Ühikmaatriks (diagonaalmaatriksi erijuht): a11 = a22 ... = amm = 1; (Täh. E); 4) Nullmaatriks: aij = 0, iga i ja j korral; (Täh ). 2. Tehted maatriksitega (korrutamine arvuga, liitmine, lahutamine, korrutamine). 1) Korrutamine arvuga: A=(aij), kR; kA=C; C=(cij), kus cij = kaij. 2) Maatriksite liit...
Crameri teoreem lineaarsete võrrandisüsteemide lahendamiseks See teoreem kehtib meelevaldsete lineaarsete võrrandisüsteemide lahendamiseks, kus võrrandite ja tundmatute arvud on võrdsed. Lisaks peavad võrrandisüsteemid olema korrastatud. Kui lineaarse võrrandisüsteemi maatriksi determinant on nullist erinev, siis avalduvad tundmatud murdudena, mille nimetajaks on süsteemi maatriksi determinant ja mille lugejad on maatriksi, mis saadakse süsteemi maatriksist vastava tunmatu kordajate veeru asendamisel vabaliikmete veeruga, determinandid. Kui maatriks täidab Crameri teoreemi eeldusi, siis öeldakse, et tegemist on Crameri peajuhtumiga. Seega Crameri peajuhtumil 1) m=n, 2) |A| 0. Tähendab, Crameri peajuhul on lineaarsel võrrandisüsteemil üksainus lahend, mis avaldub valemitega x1=|A1|/|A| x2=|A2|/|A| .. xn=|An|/|A| Determinantide omadused, determinandi arendus rea (veeru) järgi Omadus 1. Transponeerimisel (r...
KORDAMISKÜSIMUSED 2015/2016 Kõrgem matemaatika MTMM. 00.145 (6EAP) 1. Maatriksi mõiste, järk, tähistused, liigid. Maatriks on ristkülikukujuline arvude tabel, milles on m-rida ja n-veergu ja mis on ümbritsetud ümarsulgudega. Maatriksit tähistatakse suure tähega. Kui aij on reaalarvud ning i = 1; 2;...;m ja j = 1; 2;...; n, siis tabelit: nimetatakse täpsemalt (m x n)-maatriksiks ja kasutatakse tähistusi Am x n või Amn. Arvupaari (m; n) nimetatakse maatriksi A mõõtmeteks. Tabelis paiknevaid arve aij nimetatakse maatriksi elementideks. i reaindeks; j veeruindeks. reamaatriks (1 x n); veerumaatriks (m x 1); ruutmaatriks m = n Tähistused: maatriksi järk naturaalarvude paar m x n (ridade ja veergude arv). ruutmaatriksi korral järk n (n = ridade arv = veergude arv). maatriksi liigid: nullmaatriks kõik elemendid 0. tähistus teeta ...
MAATRIKS: Maatriks nimetatakse ümarsulgudesse paigutatud reaalarvude tabelit, milles on eristatavad read ja veerud. Maatriksi mõõtmed Maatriksit, milles on m rida ja n veergu nimetatakse täpsemalt (m,n)- maatriksiks ning arvupaari (m,n) selle maatriksi mõõtmeteks. Maatriksi järk Omadus, mis esineb ainult ruutmaatriksil: Näiteks Mat(n,n) nim. n-järku maatriksiks. Maatriksi elemendid nimetatakse reaalarve, milledest maatriks koosneb. Maatriksi ja maatriksite hulga tähistused Maatrikseid tähistatakse tavaliselt suurte ladina tähtedega: A, B,....X, Y, Z. Maatriksite elemente tähistatakse vastavate väikeste ladina tähtedega, mis võivad olla varustatud ka indeksitega: a, b, c, jne. Kõigi (kõikvõimalike mõõtmetega) maatriksite hulka tähistame edaspidi Mat abil ning kõigi (m, n)-maatriksite hulka tähistame edaspidi Mat(m, n) abil. Ruutmaatriks maatriks, mille ridade arv on võrdne veergude arvuga, s.t. m=n Ristkülikmaatriks maatriks,...
Lineaarvõrrandsüsteem-nim. Võrrandisüsteemi kujul {a11x1+..+a1nxn=b1 ; am1x1+.. +amnxn=bm. Arve aij nim lvs kordajateks, arvud b1..bm on vabaliikmed ja x1..xn on tundmatud. Süsteemi võrrandite arv m ja tundmatute arv n on sõltumatud. Sellist võrrandisüsteemi nimetatakse lineaarseks võrrandisüsteemiks, sest otsitavad suurused x1.. xn esinevad ainult lineaarsetes tehetes, st neid on vaid liidetud ja skalaariga korrutatud. Def. Arvude järjendit c1.. cn nim lvs lahendiks, kui tundmatute asendamisel nende arvudega (loomulikus järjekorras, st x1 = c1.. xn = cn) on süsteemi kõik võrrandid rahuldatud. Võrrsüsteemi nim kooskõlaliseks, kui tal leidub vähemalt 1 lahend. Kui lahendid puuduvad, nim sõsteemi vasturääkivaks. Võrrsüs kõigi lahendite hulka nim võrrsüs lahendihulgaks e üldlahendiks. Igal lvs-l kas lahend puudub, on ühene lahend või on lõpmata palju lahendeid. Cramer. Def. Öeldakse, et lvs-i korral on tegemist Crameri peajuhuga, kui 1)tun...
Kordamisküsimused 1) Kompleksarvu mõiste. Kompleksarvu algebraline kuju ja tehted algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b-imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k- arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= z 1 ( a1 +b 1 i ) (a 2+b 2 i) (a1+b1i)*(a2+b2), = z 2 ( a2 +b 2 i ) (a 2+b 2 i) 2) Kompleksarvu trigonomeetriline kuju ja tehted trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y- telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy ...
1. Kompleks arvude põhimõiste,põhilised definatsioonid. K.arvude liitmine,korrutamine,jagamine algebralisel kujul. DEF. k.arvuks nim. Arvufoori (a,b) kus a,bR. esitatakse z=a+bi (a-reaalosa,b- imaginaar osa,i- imaginaar ühik). Põhimõiste olgu z1=a1+b1i,z2=a2+b2i z1=z2 kui a1= a2 ja b1=b2, z=0 kui a=0 ja b=0,k-arvu z1=a1-b1i nim.kaas k-arvuks z1=a1+b1i. Arvutamine z1+z2= (a1+a2)+(b1+b2)i, z1-z2= (a1-a2)+(b1-b2), z1*z2= (a1+b1i)*(a2+b2), 2. K.geomeetriline kujutamine, trigonomeetriline kuju.korrutamine ja jagamine trigonomeetrilisel kujul. geomeetriline kujutamine k-arv/reaalarvu paar (a,b).saab k-arvu z=a+bi kujutada xy tasandil kus kordinaadid a-reaal osa, b- imaginaar osa ja vastavalt X-telg k-arvu reaal telg ja Y-telg imaginaar telg.XY tasandi iga punkt M(x,y) ongi z=x+iy trigonomeetriline kuju tähistame nurk X-teljel ja vektori pikkus r ,siis a=rcos ja b=rcos.avaldist z=r(cos+isin) ongi trigon...
Kõrgema matemaatika kordamisküsimused 1. Maatriksi definitsioon. Maatriksi elemendid. Lineaarsed tehted maatriksitega (liitmine ja skalaariga korrutamine). Nullmaatriks. Transponeeritud maatriks 2. Maatriksite korrutise definitsioon. Korrutamise omadused ja seosed lineaarsete tehete ning korrutamise vahel. Ühikmaatriks. 3. Teist ja kolmandat järku determinandid. 4. Permutatsiooni definitsioon. Inversiooni definitsioon. n-järku determinandi definitsioon. Determinandi põhiomadused 5. Maatriksi elemendi minor. Alamdeterminant. Determinandi arendus rea ja veeru järgi. Determinantide teooria põhivalem. 6. Regulaarse maatriksi mõiste. Pöördmaatriksi definitsioon ja elementide leidmise eeskiri. Pöördmaatriksi omadused. 7. Lineaarse võrrandisüsteemi definitsioon. Võrrandisüsteemi kordajad, vabaliikmed, lahend. Vasturääkiv, kooskõlaline, määratu süsteem. Süsteemi maatriks ja laiendatud ma...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
ANALÜÜTILISE GEOMEETRIA VALEMID 1. Vektori koordinaadid a = Xi +Yj + Zk = ( X ; Y ; Z ) 2. Vektori koordinaatide seos lõpp- ja alguspunktide koordinaatidega AB = ( x B x A ; y B y A ; z B z A ) 3. Vektori pikkus a = X +Y +Z 2 2 2 X Y Z cos = ; cos = ; cos = 4. Vektori suuna koosinused a a a cos 2 + cos 2 + cos 2 = 1 5. Vektorite võrdsus a = b, ( X 1 = X 2 ; Y1 = Y2 ; Z 1 = Z 2 ) 6. Vektorite summa c = a + b, ( X 3 = X 1 + X 2 ; Y3 = Y1 + Y2 ; Z 3 = Z 1 + Z 2 ) 7. Vektori korrutamine skalaariga b = na, ( X 2 = nX 1 ; Y2 = nY1 ; Z 2 = nZ1 ) X 1 Y1 Z...
Mitmemuutuja funktsiooni mõiste. Mitmemuutuja funktsiooni piirväärtuse definitsioon. Pideva mitmemuutuja Kui funktsiooni z=f(x,y) on diferentseeruv kohal (x,y), siis funktsioon f on pidev sellel kohal. funktsiooni definitsioon. Kahemuutuja funktsiooni pidevuse geomeetriline sisu. Funktsioon z=f(x,y) on diferentseeruv kohal (x,y) siis, kui funktsioonil z=f(x,y) on pidevad osatuletised fx ja fy kohal (x,y). Kui hulga Rn igale punktile P(x1, . . . , xn) on vastavusse seatud muutuja u R kindel väärtus, siis öeldakse, et hulgal on Kui funktsiooni f(x,y) osatuletised fx(x,y) ja fy(x,y) on diferentseeruvad kohal (x,y), siis fxy = fyx kohal (x,y). defineeritud n-muutuja (skalaarväärtusega) funktsioon. Suurust df:=fx(x,y)dx + fy(x,y)dy, kus dx:= x...
MTMM.00.340 Kõrgem matemaatika 1 2016 KÄRBITUD loengukonspekt Marek Kolk ii Sisukord 0 Tähistused. Reaalarvud 1 0.1 Tähistused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 0.2 Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0.3 Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 0.4 Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1 Maatriksid ja determinandid 7 1.1 Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2 Tehted maatriksi...
1. Mitmemuutuja funktsiooni lokaalsete ekstreemumite mõisted. Statsionaarne punkt. Kriitiline punkt. piirkonna D rajajoon. Eeldame, et piirkonnas D on täidetud tingimus f(x,y)>=g(x,y). Kahekordse integraali 𝑥 = 𝜌 𝑐𝑜𝑠𝜑 Mitmemuutuja funktsiooni lokaalse ekstreemumi tarvilik tingimus. Definitsioon 1. Öeldakse, et kahe omaduse tõttu ∬𝐷[𝑓(𝑥, 𝑦) − 𝑔(𝑥, 𝑦)]𝑑𝑥𝑑𝑦 = ∬𝐷 𝑓(𝑥, 𝑦)𝑑𝑥𝑑𝑦 − ∬𝐷 𝑔(𝑥, 𝑦)𝑑𝑥𝑑𝑦. Mõlemad kahekordsed 𝑦 = 𝜌 𝑠𝑖𝑛𝜑 muutuja funktsioonil on punktis P1(x1, y1) lokaalne maksimum, kui sellel punktil leidub niisugune ümbrus teisendus on kujul 𝑧=𝑧 .Tavaliselt € [0, +lõpmatus) φ € [0, 2π). ∭Ω 𝑓(𝑥, ...