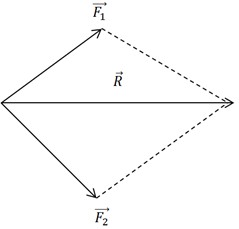
vahelise nurga koosinuse korrutisega. PrxAB=Abcos, a1b1= a2b2, PryAB=PrxAB => /AB/cos. Mitme vektori geomeetriline summa projektsioon teljele on võrdne komponent vektorite projektsioonide summaga samal teljel. Vektori komponendid ja vektori projektsioonid koordinaatteljestikus: 1. igat vektorit koordinaatteljestikus kirjeldatakse tema projektsioonide kaudu 2. projektsioonide ruutude summa ristkoordinaadis annab vektori pikkuse ruudu Loeng 2. JÕUD, SIDEMED JA NENDE SÜSTEEMID STAATIKA AKSIOOMID Kehade vahelised mõjutused võivad olla staatilised või dünaamilise. Def: suurust, mis on kehade vastastikuse toime mõõduks nim. jõuks. Selle jõu kohta kehtib Newtoni 1 seadus- iga keha seisab paigal või liigub ühtlaselt ja sirgjooneliselt seni kuni talle rakendatud jõud puuduvad või on tasakaalus. ( jõud on keha liikumise muutumise põhjus). Jõud on määratud siis, kui on teada tema suurus, mõju suund ja rakenduspunkt. Jõud on vektoriaalne suurus.
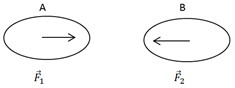
Staatika 1. Mida nimetatakse jõuks? jõud on - vektoriaalne suurus, mis väljendab ühe materjaalse keha mehaanikalist toimet teisele kehale ja mille tulemuseks on kehade liikumise muutus või kehaosakeste vastastikuse asendi muutus(deformatsioon). 2. Mis on jõu mõjusirge? jõu mõjusirge on sirge, millel asub jõud. 3. Mida nimetatakse absoluutselt jäigaks kehaks? absoluutselt jäigaks kehaks nim. sellist keha, mille, mis tahes kahe punkti kaugus jääb alati muutumatuks. 4. Millal võib kahte jõusüsteemi nimetada ekvivalentseteks? Kui ühe jõusüsteemi saab asendada teise jõusüsteemiga ilma keha liikumist või paigalseisumuutmata, siis need jõusüsteemid on ekvivalentsed. Nt. ( F 1, F 2, ..
Mida nimetatakse jõuks? Jõud on vektoriaalne suurus mis väljendab ühe keha mõju teisele. Mis on jõu mõjusirge? Sirge mida mööda jõud mõjub on jõu mõjusirge. Mida nimetatakse absoluutselt jäigaks kehaks? Absoluutselt jäik keha on selline keha mille punktide vahelised kaugused jäävad alati muutumatuks. S.t. absoluutselt jäik keha ei deformeeru. Millal nimetatakse kahte jõusüsteemi ekvivalentseteks? Ekvivalentseks jõusüsteemiks nimetatakse jõusüsteemi, millega saab asendada kehale mõjuva algse jõusüsteemi ilma, et keha tasakaal sellest muutuks.
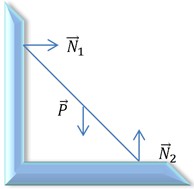
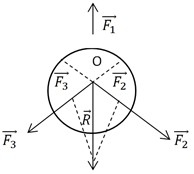
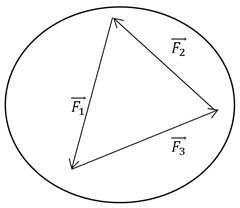
Eksamiküsimused: 1. Kirjeldage kolme mitteparalleelse jõu tasakaalutingimusi Kuna jõud on libisev vektor, siis kanname jõud F1 ja F2 nende mõjusirgete lõikumise punkti. Tasakaaluaksioomi kohaselt on F12 ja F3 tasakaalus, kuinad on võrdvastupidised ja neil on sama mõjusirge. Viimane tingimus on täidetud, kui F1, F2 ja F3 mõjusirged lõikuvad ühes punktis. Jõuvektorid peavad moodustama kinnise jõukolmnurga kindla ümberkäigusuunaga. Järeldus: 1. Kolm mitteparalleelset jõudu on tasakaalus vaid siis, kui nende mõjusirged lõikuvad ühes punktis ja neist saab moodustada kinnise kolmnurga kindla ümberkäigusuunaga. 2
välisjõudude mõjul. Igapäevases praktikas me aga näeme, et rakendatud jõudude toimel on need deformatsioonid üldiselt väga väikesed ja paljudes ülesannetes võib nad esimeses lähenduses jätta arvestamata. See asjaolu õigustabki jäiga keha konseptsiooni kasutamist teoreetilises mehaanikas. Teoreetiliseks mehaanikaks nimetatakse teadust, mis uurib materiaalsete kehade paigalseisu ja liikumise üldisi seadusi seoses nende kehade vastastikuste mõjudega. Ülesannete iseloomu järgi jaotatakse teoreetiline mehaanika üldiselt nelja ossa: 1) staatikaks, 2) kinemaatikaks, 3) dünaamikaks, 4) analüütiline mehaanika. Staatikaks nimetatakse mehaanika osa, milles antakse üldine õpetus jõududest ja uuritakse jõudude mõju all olevate materiaalsete kehade tasakaalu tingimusi.
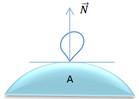
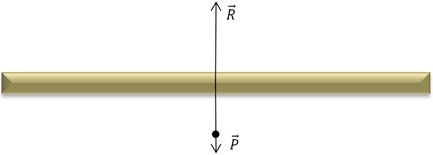
samas punktis/tasakaalus, kui jäigaks. võrdub kõigi vaadeldava resultant on võrne nulliga jõusüst. jõudude sama punkti R=0), paralleel (mõjusirged Sidemete aksioom- Iga seotud suhtes leitud momentide paralleelsed), üldine (ei ole keha võib vaadelda vaba geomeetrilise summaga. koonduv ega paralleel), kehana, kui asendada sidemed tasapinnaline (mõjusirged reaktsioonijõududega. asuvad ühel ja samal tasandil), ruumiline (mõjusirged ei asu Sileda pinna reaktsioonijõu ühel ja samal tasandil) puhul on see alati risti pinnaga kuhu toetub – normaalreaktsioonid. Kinemaatika – teadus iseloomustab kiiruse Liitliikumine: absoluutne(punkti liikumisest, mille juures muutumist
Jõu sidemed ja nende süsteemid J'ika keha nim vabaks kui teda saab antud asendist üle viia mistahes uude asendisse. tingimusi mis kitsendavad keha liikumist nim. sidemeteks. Sideme reakt. on suuantud vastupidiselt suunale milles side takistab keha liikumist. Kuna reakt. jõud ilmnevad alles kehade tegelikult toimuvate jõudude mõjul siis nim neid kak passiivseteks jõududeks. Aktiivsete jõudude allkõistame aga kõiki neid jõude mis ei ole reakts. jõu. Kolme mitteparalleelse jõu tasakaalutingimused - Kolm mitteparal. jõudu on tasakaalus siis ja ainult siis kui nende mõjusirged lõikuvadühes punktis. et neist saab moodustada kinnise hulknurga kindlaümberkäigu suunaga. Et jõudude hulknurga saab moodustada üksnes ühes tasapinnas olevate
Jõu sidemed ja nende süsteemid J'ika keha nim vabaks kui teda saab antud asendist üle viia mistahes uude asendisse. tingimusi mis kitsendavad keha liikumist nim. sidemeteks. Sideme reakt. on suuantud vastupidiselt suunale milles side takistab keha liikumist. Kuna reakt. jõud ilmnevad alles kehade tegelikult toimuvate jõudude mõjul siis nim neid kak passiivseteks jõududeks. Aktiivsete jõudude allkõistame aga kõiki neid jõude mis ei ole reakts. jõu. Kolme mitteparalleelse jõu tasakaalutingimused - Kolm mitteparal. jõudu on tasakaalus siis ja ainult siis kui nende mõjusirged lõikuvadühes punktis. et neist saab moodustada kinnise hulknurga kindlaümberkäigu suunaga. Et jõudude hulknurga saab moodustada üksnes ühes tasapinnas olevate























Kõik kommentaarid