Punktide 1, 2 ja 3 geodeetilised ning ristkoordinaadid Punkt B L X(km) Y(km) 1 5923'35'' 2507'35'' 6684,37 564,03 2 5924'20'' 2510'33'' 6685,80 566,81 3 5925'13'' 2509'58'' 6687,45 566,23 1) Meridiaanide koonduvuse arvutamine. a) Meridiaanide koonduvuse arvutamine mõõdetud direktsiooninurkade ja tõeliste asimuutide järgi. At12= 6400'00''; At13= 3700'00''; 12= 6300'00''; 13= 3600'00'' Valemid: = At12- 12 1= 6400'- 6300'= 100'; 2= 3700'- 3600'= 100' Kaardil on NE: 109' b) Meridiaanide koonduvuse arvutamine punktide geodeetiliste koordinaatide järgi: Valemid: = L*sinB, kus L= L-Lt ja Lt= 2500'(telgmeridiaani väärtus) L1= 2507'35''- 2500'00'' = 07'35'' 1=07'35''*sin 5923'35''= 06'32'' L2= 2510'33''- 2500'00'' = 10'33''
13 = 154°30 Tõelised asimuudid A12 = 124° A13 = 156°30 Horistontaalnurk = 32°30 Punkt B L X Y 1 58°5526 26°185 6533850 655450 2 58°5436 26°2033 6532350 657850 3 58°5413 26°19 6531850 656400 1. Meridiaanide koonduvuse arvutamine a) Meridiaanide koonduvuse arvutamine mõõdetud direktsiooninurkade ja tõeliste asimuutide järgi. 1 = A12 - 12 = 124° -122° = 2° 2 = A13 - 13 = 156°30 -154°30 = 2° Kaardil on SW : 1°51 a) Meridiaanide koonduvuse arvutamine punkti geodeetiliste koordinaatide järgi. = L × sin B, kus L = L - Lt ja Lt = 24°00, see on te lg meridiaani väärtus. L1 = 26°185 - 24° = 2°185 1 = 2°185 × sin 58°5526 = 1°5816 L2 = 26°2033 - 24° = 2°2033 2 = 2°2033 × sin 58°5436 = 2°022 L3 = 26°19 - 24° = 2°19 3 = 2°19 × sin 58°5413 = 1°592
abil, esitage tundmatute punktide tasandatud koordinaadid koos täpsushinnangutega ning tasandatud mõõtmistulemused koos hälvete ja standardhälvetega. Teodoliitkäigu tasandamiseks kasutame programmi Adjust võimalust Least Squares Adjustment of Plane Surveys. Selle jaoks peame esmalt looma lähteandmetest sisendfaili. Faili esimesele reale tuleb kirjutada selgitav tekst (nt töö pealkiri), järgnevale reale tuleb kirjutada joonte, nurkade, direktsiooninurkade, lähtepunktide ning kõigi jaamade arv. Kolmandast reast alates lähtepunktide koordinaadid. Read 5-6 on tundmatud punktid koos ligikaudsete koordinaatidega. Järgnevalt mõõdetud kaugused ja mõõdetud nurgad koos standardhälvetega. Fail on toodud järgnevalt. IT6 34024 X 454.206864 628.921272 A 598.712544 337.456272 B 850.989408 681.173136 C 1140.006864 312.962544 A B 426.360336 0.006096 B C 468.08136 0.0064008 C A 541.852104 0.0067056 X A B 62 38 55,4 5,6 B A C 56 18 41,9 5,3
suunast) kuni antud jooneni, tähis R väärtus 0 0 ... 900 nt RNO 570 (indeks näitab ingliskeelsete tähiste abil veerandit). Geodeesias kasutatakse orienteerimiseks direktsiooninurka ja see nurk mõõdetakse x-telje positiivsest suunast päripäeva kuni antud jooneni ( 00 ...3600) Analoogiliselt asimuudile kasutatakse ka direktsiooninurkadega koos rumbe, ainuke vahe on, et asimuudi puhul märgitakse rumbe ilmakaarte järgi, aga direkstsiooninurkade puhul veerandite järgi. Direktsiooninurkade määramiseks maastikul kasutatakse plaanilise geodeetilise põhivõrgu punkte, eriti tihendusvõrgu punkte. Ja kui jätkata mõõtmist ühest paarispunktist, siis saab oma kõigu külgedele arvutada direktsiooninurga Direktsiooninurkade arvutamine (nagu nurgad ja pikkused matemaatikas ikka) Horisontaalmõõdistamine Nimetatakse ka kontuurmõõdistamine ja teodoliitmõõdistamine. Horisontaalmõõdistamine on tööde kompleks, mille tulemusena saadakse maastiku plaan ettenähtud
1 Arvutasin ette antud punktide (0 ja 99 ning 36 ja 37) koordinaatide järgi x ja y väärtused (viimane miinus eelmine) 2 Arvutasin punktide 99 ja 0 vahelise lõigu tabelinurga valemiga tan(r)=y/x 3 Vaatasin y ja x ees olevate märkide järgi millisesse veerandisse saadud tabelinurgad jäävad ning tuletasin tabelinurkade valemite kaudu direktsiooninurgad 4 Saadud direktsiooninurkade abil (viimase punkti nurk - esimese punkti nurk + piisaval hulgal 360) leidsin teoreetilise mõõdetud nurkade (b) summa teor ja mõõdetud nurkade summeerimise teel prakt 5 Leidsin mõõtmisvea, mille jagasin mõõdetud nurkade vahel ära ja sain tasandatud veergu numbrid 6 Järgmiseks leidsin kõikide punktide juures direktsiooninurgad valemiga 2,3=1,2+2-180
valguskaugusmõõturite hulka, kus mõõtühikuks on moduleeritud valgusvoo lainepikkus või ajaintervall valgusimpulsside vahel. Suure intensiivsusega valguskiirgus toimib lühikeste impulssidena, mille kulgemisaega kiirgurist peegeldini ja tagasi mõõdetakse kiirarvesti või mingi teise seadme abil ehk järgneva ajaintervalli muutumise abil.Polügonomeetriakäigu sidumine- kõrgema järgu geodeetilise võrguga toimub käigu punktide koordinaatide ja joonte direktsiooninurkade leidmiseks. Täpseim sidumine saadakse külgnevatest lähtesuundadest mõõdetud nurkade abil.Meetodid on järgmised:Polügonomeetriakäigu sidumine külgnevatest lähtesuundadest mõõdetud nurkade abil, Koordinaatsidumine, Vastulõige, otselõige, hanseni ülesanne, või laterangulaarse meetod.Koordinaatsidumine-Kui naaberalusepunktide vahel puudub nähtavus ja polügonomeetriakäigu sidumist ei saa klassikalisel meetodil ei saa kasutada kasutatakse koordinaatsidumist
mõõtühikuks on moduleeritud valgusvoo lainepikkus või ajaintervall valgusimpulsside vahel. Suure intensiivsusega valguskiirgus toimib lühikeste impulssidena, mille kulgemisaega kiirgurist peegeldini ja tagasi mõõdetakse kiirarvesti või mingi teise seadme abil ehk järgneva ajaintervalli muutumise abil.Polügonomeetriakäigu sidumine-kõrgema järgu geodeetilise võrguga toimub käigu punktide koordinaatide ja joonte direktsiooninurkade leidmiseks. Täpseim sidumine saadakse külgnevatest lähtesuundadest mõõdetud nurkade abil.Meetodid on järgmised:Polügonomeetriakäigu sidumine külgnevatest lähtesuundadest mõõdetud nurkade abil, Koordinaatsidumine, Vastulõige, otselõige, hanseni ülesanne, või laterangulaarse meetod.Koordinaatsidumine-Kui naaberalusepunktide vahel puudub nähtavus ja polügonomeetriakäigu sidumist ei saa klassikalisel meetodil ei saa kasutada kasutatakse koordinaatsidumist
Valemid 1. Geodeetiline otseülesanne koordinaatide juurdekasvude leidmine, punkte ühendava joone pikkuse ja direktsiooninurga kaudu. Antud on: XA; YA; joonepikkus - s ja rumbiline nurk R Leida: XB; YB Juurdekasvud: X = s * cos R ja Y = s * sin R Koordinaadid: XB = XA + X ja YB = YA + Y Kontroll: s = D * cos Direktsiooninurkade ja rumbide seos Veerand Dir. nurk A Tähis Rumb R 0 0 I 0 ...90 NE R1 = A II 900...1800 SE R2 = 1800 A III 1800...2700 SW R3 = A - 1800 0 0 IV 270 ...360 NW R4 = 3600 A Rumbi seos juurdekasvude märgiga Veerand Tähis X Y I NE + + II SE - + III SW - - IV NW + - 2
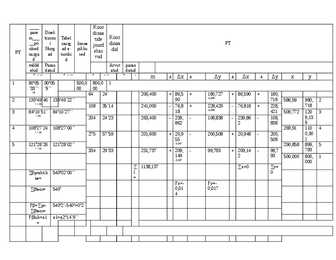
F=pr- 54002`-5400=002 teor= Flub=±1 ±1=±2014`9`` = KINNISE KÄIGU ARVUTUS xA-B = xB-xA xA-B = 500,000-599,853 = -99,853 yA-B= yB-yA yA-B= 800,000-681,000 = +119 Tan R1-2 = 119:(-99,853) = 49°5959,85 50°00 RII = 49°5959,85 50°00 A-B= 180° - 50° = 130° 12 = AB ± 180º + B Direktsiooninurkade arvutus ülejäänud käigu suundadele 23 = 12 ± 180º 2 34 = 23 ± 180º 3 kuni 51 = 45 ± 180º 5 12 = 130°-180°+113°84´ = 64° 24´ 51 = 334° 29´33´´-180° -90°05´33´´= 64° 24´ x = cos 12 l12
infokandjatega. Alpool joonisel 2 näidatud tüüpiline Conning Display pilt: Joon 2. Süsteem võimaldab: - Info kogumine kõigilt navigatsioonianduritelt; - Andmevahetus LAN-võrgu kaudu kõigi navigatsiooniarvutite vahel; - Reaalajas kõigi andmete kuvamist; - Elektrooniliste kaartide kuvamine koos enda ja lähimate laevade positsiooni (koordinaatidega) ja muu AIS-infoga; - Reisiplaani koostamist; - Reisiplaani realiseerimist; - Elektrooniliste direktsiooninurkade (aasimuutide) kuvamist; - Navigatsioonimarkerite kuvamist; - Kõikehõlmavat laevajuhi navigatsiooniinfot ja alarmsignalisatsiooni; - Navigatsiooniandmete elektroonilisi väljavõtteid ja printimist; - Autopiloodi juhtimist; - Kiiruse muutmist; - Radaripilti eraldi ja laotuna elektronkaardile; - ECDIS kaartide kasutamist; - Andmeedastust VDR-le (nn. ,,Mustale kastile"); - Oma vajadustelevastavate elektronkaartide tegemist vastava tarkvara olemasolul;
jargi. TiihisR vdi r; vzizirtused 0o...90o. IV veerand III veerand Direl'lsiooninurkademaaraniseksmaastikulkasutplaanilisegeodeetilisep6hiv6rgupunLte, eriti tihendusvorgupunkte,mis on rajatudpaarikaupa. Saabmitirata punktidevahelisesihi direktsiooninurgaja kui jiitkata m66tmistiihest paarispunLtist,siis saabomakd.igl kiilgedeleamrtadadirektsiooninurgad. 4l - 7 - Direktsiooninurkade anutarnine Antud:or,z M66detud:pzv6i Pz' P2- vasakpoolnehorisonlaalnwk B2'- parempoolnehorisontaalnurk
horisontaalprojektsiooni järgi. X= I,IV+ II,III- Y=I,II+ III,IV- 15. Pöörülesanne, antud on kahe punkti koordinaadid 16. IV I III II 17. Riiklik geodeetiline referentssüsteem Riigi ulatuses peavad ruumiandmes olema ühtses geodeetilises süsteemis. 18. Tagatud peab olema mõõdistamsvõrgu punktide omavaheline nähtvavus ja mõõdistamisvõrgu punktid peavad paiknema piisava tihedusega. 19. Direktsiooninurkade määramiseks kasutatakse plaanilise geodeetilise põhivõrgu punkte. Alustades mõõtmist ühest paarispunktist, saab teodoliitkäigu kõikidele külgedele arvutada direktsiooninurgad. Kontrolliks lõpetatakse käik samuti riikliku geodeetilise võrgu punktides. 20. Skemaatiline joonis, millel näidatakse ära lähimad maastiku püsiobjektid ja mõõdetakse sidemed. 22. Väikesed juhuslikud vead(ei ületa äärmist viga /n=0, mõõtmistulemused kuhjuvad ümber õige tulemuse),
Mõõtjast sõltuvad õiged töövõtted , hea nägemisteravus, parallaksi kõrvaldamine. 50.Teodoliitkäigud, teodoliitkäikude liigid? Kinnine teodoliitkäik algab ja lõpeb samas koordineeritud punktis 1(A). Lähtekülgedega käik on rajatud kahe tuntud koordinaatidega punkti B ja C vahele ning punktidest B ja C on nähtavad koordineeritud punkti A ja D. Lähtekülgedeta käik on rajatud kahe tuntud koordinaatidega punkti A ja B vahele, kuid puuduvad nn lähteküljed käigu joontele direktsiooninurkade saamiseks. See ülesanne kannab ka nimetust koordinaatsidumine. Rippuv käik - Rippuvast punktist 1 ei lähe käik edasi. A ja B on eelnevalt koordineeritud punktid, moodustades nn baasjoone. 51.Kuidas toimub teodoliitkäigu välja märkimine, mõõdistamine? Lähtudes eelnevalt koordineeritud punktidest (riiklikud geodeetilise võrgu punktid) ja määrates X-, Y-koordinaatid mõõdistamispõhistele punktidele, moodustub nn plaaniline mõõdistamise alusvõrk
4. Mõõtjast sõltuvad õiged töövõtted , hea nägemisteravus, parallaksi kõrvaldamine. 14. Teodoliitkäigud, teodoliitkäikude liigid Kinnine teodoliitkäik algab ja lõpeb samas koordineeritud punktis 1(A). Lähtekülgedega käik on rajatud kahe tuntud koordinaatidega punkti B ja C vahele ning punktidest B ja C on nähtavad koordineeritud punkti A ja D. Lähtekülgedeta käik on rajatud kahe tuntud koordinaatidega punkti A ja B vahele, kuid puuduvad nn lähteküljed käigu joontele direktsiooninurkade saamiseks. See ülesanne kannab ka nimetust koordinaatsidumine. Rippuv käik - Rippuvast punktist 1 ei lähe käik edasi. A ja B on eelnevalt koordineeritud punktid, moodustades nn baasjoone. 15. Kuidas toimub teodoliitkäigu väljamärkimine, mõõdistamine Lähtudes eelnevalt koordineeritud punktidest (riiklikud geodeetilise võrgu punktid) ja määrates X-, Y-koordinaatid mõõdistamispõhistele punktidele, moodustub nn plaaniline mõõdistamise alusvõrk
YT = YA + Y, Y = s * sin RY: I +, II +, III , IV 11. Geodeetiline pöördülesanne. Joone direktsiooninurga ja joone pikkuse arvutamine otspunktide ristkoordinaatide järgi. Antud Punktid A(XA, YA) ja B(XB, YB) Leida X, Y, s, R Lahendus X = XB XA Y = YB YA s2 = X2 + Y2 R = arctan (X / Y) = arcsin (Y / s) = arccos (X / s) 12. Direktsiooninurkade arvutamine. Parempoolsed nurgad i = i-1 ± 180o i t = n * 180o + a n t = 180o (n 2) Vasakpoolsed nurgad i = i-1 ± 180o + i t = n * 180o a + n t = 180o (n 2) 13. Riigi geodeetiline põhivõrk. Geodeetilisteks töödeks peab olema iga riigi territooriumil geodeetilistest punktidest koosnev võrk, millede omavaheline asend on määratud täpselt. 1926-1940 rajati põhivõrk, mis oli seotud teiste Läänemeremaadega ühtseks võrguks. NL ajal rajati
YT = YA + Y, Y = s * sin R Y: I +, II +, III , IV 11. Geodeetiline pöördülesanne. Joone direktsiooninurga ja joone pikkuse arvutamine otspunktide ristkoordinaatide järgi. Antud Punktid A(XA, YA) ja B(XB, YB) Leida X, Y, s, R Lahendus X = XB XA Y = YB YA s2 = X2 + Y2 R = arctan (X / Y) = arcsin (Y / s) = arccos (X / s) 12. Direktsiooninurkade arvutamine. Parempoolsed nurgad i = i-1 ± 180o i t = n * 180o + a n t = 180o (n 2) Vasakpoolsed nurgad i = i-1 ± 180o + i t = n * 180o a + n t = 180o (n 2) 13. Riigi geodeetiline põhivõrk. Geodeetilisteks töödeks peab olema iga riigi territooriumil geodeetilistest punktidest koosnev võrk, millede omavaheline asend on määratud täpselt. 1926-1940 rajati põhivõrk, mis oli seotud teiste Läänemeremaadega ühtseks võrguks. NL ajal rajati
50. Teodoliitkäigud, teodoliitkäikude liigid? Kinnine teodoliitkäik algab ja lõpeb samas koordineeritud punktis 1(A). Lähtekülgedega käik on rajatud kahe tuntud koordinaatidega punkti B ja C vahele ning punktidest B ja C on nähtavad koordineeritud punkti A ja D. Lähtekülgedeta käik on rajatud kahe tuntud koordinaatidega punkti A ja B vahele, kuid puuduvad nn lähteküljed käigu joontele direktsiooninurkade saamiseks. See ülesanne kannab ka nimetust koordinaatsidumine. Rippuv käik - Rippuvast punktist 1 ei lähe käik edasi. A ja B on eelnevalt koordineeritud punktid, moodustades nn baasjoone. 51. Kuidas toimub teodoliitkäigu välja märkimine, mõõdistamine? Lähtudes eelnevalt koordineeritud punktidest (riiklikud geodeetilise võrgu punktid) ja määrates X-, Y- koordinaatid mõõdistamispõhistele punktidele, moodustub nn plaaniline mõõdistamise alusvõrk.
Joonis 2.4. Punkti absoluutne ja suhteline kõrgus Ülesanne 2. Lahendada geodeetiline pöördülesanne, s.t. leida määratud joonte otspunktide ristkoordinaatide järgi joonte pikkused ja võrrelda arvutatud joonepikkusi laboratoorses töös nr. 1 mõõdetud joonepikkustega. Geodeetilise pöördülesande lahendamine Pöördülesandeks nimetatakse joonte horisontaalprojektsioonide ja direktsiooninurkade (rumbide) leidmist joonte otspunktide ristkoordinaatide järgi. Laboratoorses töös nr. 2 ülesandes 1 on määratud kolmele punktile ristkoordinaadid. Ristkoordinaatide järgi saab leida joonte pikkused. +x s12 = Δx 2 + Δy 2 = (X 2 − X1 )2 + (Y2 − Y1)2 ; ∆Y12 s23 = Δx 2 + Δy 2 = (X 3 − X 2 )2 + (Y3 − Y2 )2
Mõõtjast sõltuvad õiged töövõtted , hea nägemisteravus, parallaksi kõrvaldamine. 14. Teodoliitkäigud, teodoliitkäikude liigid Kinnine teodoliitkäik algab ja lõpeb samas koordineeritud punktis 1(A). Lähtekülgedega käik on rajatud kahe tuntud koordinaatidega punkti B ja C vahele ning punktidest B ja C on nähtavad koordineeritud punkti A ja D. Lähtekülgedeta käik on rajatud kahe tuntud koordinaatidega punkti A ja B vahele, kuid puuduvad nn lähteküljed käigu joontele direktsiooninurkade saamiseks. See ülesanne kannab ka nimetust koordinaatsidumine. Rippuv käik - rippuvast punktist 1 ei lähe käik edasi. A ja B on eelnevalt koordineeritud punktid, moodustades nn baasjoone. 15. Kuidas toimub teodoliitkäigu väljamärkimine, mõõdistamine? Lähtudes eelnevalt koordineeritud punktidest (riiklikud geodeetilise võrgu punktid) ja määrates X-, Y-koordinaatid mõõdistamispõhistele punktidele, moodustub nn plaaniline mõõdistamise alusvõrk
punktide A ja A' vahel, mis mõõdetakse plaanilt ja avaldatakse meetrites. Otseülesannejoone teise otspunkti koordinaatide arvutamine. Pöördülesannejoone kahe otspunkti koordinaatide järgi arvutatakse joone pikkus ja direktsiooninurk. Kinnisne käik. 1) nurkade teoreetiline käik Sulgemisviga tasandatakse kõigi nurkade vahel ära. 2) nurga parandid Kontrollimiseks liidetakse kokku tasandatud nurgad, mis peab võrduma nurkade teoreetilise summaga. 3) direktsiooninurkade arvutamine. 4) kontroll kas on sama direktsiooninurk, mis lähtedirektsiooninurk oli.5) koordinaatide juurdekasvude arvutamine 6) koordinaatide juurdekasvude sulgemisviga Y 7) juurdekasvude tasandamine. 8)koordinaatide arvutamine. Lahtine käik: 1) nurkade praktiline summa = kõik kokku. 2) nurkade teoreetiline summa 3) nurkade tasandamine ja sidumatus. 4), 5), 6) sama, mis kinnise käigu puhul. Detailmõõdistamine mõõdistatakse püsivaid objekte.
LahendusXT = XA + X, X = s * cos R X: I +, II , III , IV + YT = YA + Y, Y = s * sin RY: I +, II +, III , IV 15. Geodeetiline pöördülesanne Joone direktsiooninurga ja joone pikkuse arvutamine otspunktide ristkoordinaatide järgi. Antud Punktid A(XA, YA) ja B(XB, YB) Leida X, Y, s, R LahendusX = XB XA Y = YB YA s2 = X2 + Y2 R = arctan (X / Y) = arcsin (Y / s) = arccos (X / s) 16. Direktsiooninurkade arvutamine nii koordinaatidest kui ka mõõdetud nurkadest Parempoolsed nurgad i = i-1 ± 180o i t = n * 180o + a n t = 180o (n 2) Vasakpoolsed nurgad i = i-1 ± 180o + i t = n * 180o a + n t = 180o (n 2) 17. Riigi geodeetiline põhivõrk Geodeetiliseks võrguks nim maastikul kindlustatud ja ühtses koordinaatide süsteemis olevat geodeetiliste punktide kogumit, millest lähtutakse geodeetiliste mõõtmistel ja topograafilistel mõõdistamistel
YT = YA + ∆Y, ∆Y = s * sin R ∆Y: I +, II +, III –, IV – 15. Geodeetiline pöördülesanne Joone direktsiooninurga ja joone pikkuse arvutamine otspunktide ristkoordinaatide järgi. Antud Punktid A(XA, YA) ja B(XB, YB) Leida ∆X, ∆Y, s, R Lahendus ∆X = XB – XA ∆Y = YB – YA s2 = ∆X2 + ∆Y2 R = arctan (∆X / ∆Y) = arcsin (∆Y / s) = arccos (∆X / s) 16. Direktsiooninurkade arvutamine nii koordinaatidest kui ka mõõdetud nurkadest Parempoolsed nurgad αi = αi-1 ± 180o – βi ∑βt = n * 180o + αa – αn ∑βt = 180o (n – 2) Vasakpoolsed nurgad αi = αi-1 ± 180o + φi ∑φt = n * 180o – αa + αn ∑φt = 180o (n – 2) 17. Riigi geodeetiline põhivõrk Geodeetiliseks võrguks nim maastikul kindlustatud ja ühtses koordinaatide süsteemis olevat geodeetiliste punktide kogumit, millest lähtutakse geodeetiliste mõõtmistel ja topograafilistel
temperatuurist tingitud parand, 5) dDh joone kaldeparand, 6) dDpr prismaparand. 24) Nimeta kaks põhilist gravimeetri tüüpi. Vedrugravimeeter (vähe täpne, kasutataksse väljas), pendelgravimeeter (statsionaarne). 25) Kuidas peaks toimuma polügonomeetriakäigu sidumine ideaaljuhul? Polügonomeetriakäigu sidumine kõrgema järgu geodeetilise võrkuga toimub käigu punktide koordinatide ja joonte direktsiooninurkade leidmiseks. Täpseim sidumine saadakse külgnevatest lähtesuundadest mõõdetud nurkade abil. Tänapäeval kasutatakse põhiliselt polügonomeetriakäigu sidumise kolm meetodit: 1. Sidumine baaspunktide ja suundadega, kusjuures ideaaljuhul kasutatakse külgnevaid suundasid. 2. Koordinaat e. pimesidumine. 3. Sidumine mitmekordse vastulõikega ja seinapolügonomeetria. 26. Millised on polügonomeetriakäigu koordinaatmeetodil sidumise puudused
Lahendus X = XB XA Y = YB YA Phytagorase teoreemi põhjal: s2 = X2 + Y2 R = arctan (X / Y) = arcsin (Y / s) = arccos (X / s) Pärast rumbilise nurga arvutamist ja arvutuste kontrollimist teise valemi järgi määratakse tabelis toodud juurdekasvude märkide kombinatsioonid põhjal rumbi nimetus(veerand). Pärast direktsiooninurga arvutamise saab joone pikkuse leida täisnurksest kolmnurgast KTT'. 16. Direktsiooninurkade arvutamine nii koordinaatidest kui ka mõõdetud nurkadest Koordinaatidega Joone direktsiooninurga ja joone pikkuse arvutamine otspunktide ristkoordinaatide järgi. Antud Punktid A(XA, YA) ja B(XB, YB) Leida X, Y, s, R Lahendus X = XB XA Y = YB YA s2 = X2 + Y2 R = arctan (X / Y) = arcsin (Y / s) = arccos (X / s) Mõõdetud nurkadest. Parempoolsed nurgad i = i-1 ± 180o i t = n * 180o + a n t = 180o (n 2)
jne.). Kôik abijooned (diagonaalid ja muud) kustutatakse, koordinaatide vôrgust jäetakse ainult tipud. Juurde lisatakse plaani pealkiri ja muud tarvilikud andmed. Plaani servadest jäetakse 5-10 cm vaba ruumi. Plaani originaal jääb töö tegijale hilisemate pretensioonide jaoks. 11.Rippuva teodoliitkäigu arvutamine. Lähtedirektsiooniniurga arvutamine: tanba = yba / xba 'ba ba dba = yba / sinba = xba / cosba A Direktsiooninurkade arvutamine: 3 5 a1 = ba + a -180° B 12 = a1 + 1 -180° Koordinaatide juurdekasvude arvutamine: 2 xa1 = d a1 cos a1 x12 = d 12 cos 12 ya1 = d a1 sin a1 ya1 = d a1 sin a1 Koordinaatide arvutamine: X1=xa+xa1 X2=x1+x12 y1=ya+ya1 y2=y1+y12 13.Nivelliiri kontroll ja justeerimine.
X: I+, II -, III- , IV + Y: I+, II +, III-, IV - 15. Geodeetiline pöördülesanne Geodeetiline pöördülesanne seisneb joone direktsiooninurga ja joone pikkuse arvutamises tema otspunktide ristkoordinaatide järgi. Antud: Punktid A(Xa, Ya) ja B (Xb, Yb) Leida: X, Y, d(AB), alfa (AB) Lahendus: X= Xb-Xa ja Y= Yb-Ya d(AB)ruudus= Xruudus+Yruudus alfa(AB)= arctan(Y/X) X: I+, II - (90...180), III- (180..270) , IV + Y: I+ (0...90), II +, III-, IV - (270...360) 16. Direktsiooninurkade arvutamine nii koordinaatidest kui ka mõõdetud nurkadest Direktsiooninurkade arvutamiseks kirjutatakse lähteandmed ja tasandatud nurgad koordinaatide arvutuslehele. Polügooni (käigu) kõik direktsiooninurgad arvutatakse järjest. Alustada antud algsuunast ja lõpetades antud lõppsuunaga (kinnisel käigul a=lõpp). Parempoolselt mõõdetud nurkade käik: Iga joone direktsiooninurk arvutatakse eelneva joone direktsiooninurga ja parandatud nurga järgi valemist: i = i-1 ± 180o i