Pehmed magnetmaterjalid (raud, pehme teras). Nende materjalidega on võimalik saada suurt magnetvoo tihedust suhteliselt väikese magnetvälja tugevuse juures, kuid seejuures magneetuvad nad kergesti lahti. Pehmeid magnetmaterjale kasutatakse seal, kus on tegemist perioodilise ümbermagneetimisega nagu elektromagnetite südamikena. Pehmeid magnetmaterjale iseloomustab kitsas hüstereesisilmus. Trahvode südamikud EL.Mootori rootor , Asünkroon mootori staator: omaduseks suure magnetilise läbivusega. 8. LED valgustuse eelised teiste valgustussüsteemide ees. Purunemisel ei teki ohtlike jäätmeid (näiteks elavhõbe, klaasi kilde) Võib tihti sisse/välja lülitada Tarbib vähe elektrit Kannatab vibratsiooni teatud piirides Saab kasutada väga edukalt õues ( Tööiga ei vähene ega valgustugevus samuti)
seetõttu peavad töötama koos kas sulav- või teiste kaitsmetega. Alapinge eest nad kaitsevad, lülitudes välja, kui pinge langeb 50...60 protsendini nimipingest (kui pinge langeb alla lubatu, ei suuda elektromagnet enam ankrut kinni hoida ning see eemaldub vedru mõjul ja katkestab vooluringi. Lk 250. 38.Mis on magnetkäiviti ja millest see koosneb? lk 255 Magnetkäiviti onelektromagneetiline läliti,mida kasutatakse täilele võrgupingele lülitavate asünkroon mootorite sisse-välja lülitamiseks ja ülekoormuse kaitseks . Need koosnevad kolmepooluselistest kontaktoritest ja termoreleedest ja sulav kaitsmest. 42.Mis on magnetkäiviti blokeerkontaktide ülesanne?kuidas töötaks mootor,kui blokeerkontaktid jäetaks ühendamata? lk 256 Blokeerkontakti ülesandeks on sulguda üheaegselt jõukontaktidega ja sillata ehk plokeerida käivitus nupp. Kui blokeerkontaktid jäävad ühendamata ,siis mootor töötab
bit/s edastada 600 boodiga kasutades faasi tõstmist Modemite andmeedastuskiirused Modemite andmeedastuskiirused olid veel 45 aastat tagasi 9 600 bit/s. Seejärel modemid 14 400 ja 28 800 bit/s ja tänaseks üle 30 000 bit/s. 33,6 kbit/s on lagi mida korralikud analoogliinid suudavad läbi lasta. Uus tehnoloogia 1997 aastast võimaldas andmete eelpakkimise tõttu tõsta analoog telefoniliinis edastuskiirust 56 kbit/s ni (kuni 72 kbit/s). Põhiparameetriteks on veel: ühilduvus (asünkroon, sünkroon jt); sobivus sidekeskkonnaga (analoogtelefoniliin või kõrgesagedusliinid); veaparandus (kui viga siis edastustsükkel korratakse seni kuni viga ei teki) ja andmetihendus; lisatööviisid (ümberlülitus telefonitööle, automaatne helistamine, automaatne vastuvõtt, numbrite mällusalvestus jt). Analoogmodem Analoogmodem on tavaline modem, mis muundab arvutist väljuvad digitaalsignaalid toonideks, mida on võimalik edastada üle analoogtelefoniliinide
"- ". ( SNMP) , (.. SNMP ) , (, , , ), . , . , , . SNMP MIB (Managment Information Base, ), , . SNMP UDP. SNMP , . , . SNMP RMON (Remote Monitoring) Ethernet Token Ring RMON2 . RMON , . SNMP , ManageWISE Novell UnicenterTNG Computer Associates. : 1) 2D , , ( ); 2) , ; 3) . 60. Sünkroniseerimine, asünkroon- ja sünkroonedastus - , . . , . - , - . ( ) . -. , . , . «» «». , , -, , -, , , . «» , «» , , , , , . , . , «». «» . - . , . - , , 0111110, . , . . , .
Määrdenippel, 4. Kardaani liikuv nuuttoru, 5. Kardaani nuutvõll, 6. Tihend, 7. Tolmukatte, 8. Kardaani toru võll. Võlliliigendid jagunevad täis- ja poolliigenditeks. Täisliigenditel (Joonis 40) on kindlad õõtsumisteljed, mis võimaldavad võlli kallet et 20... 25°. Poolliigendite õõtsumisteljed on kindla orientatsioonita ja nendega ühendatud võlli kalle on vaid mõni kraad. Nad korvavad raami kõverusest ja paigaldusvigadest tingitud vildakusi. Täisliigendid jagunevad asünkroon- ehk muutkiirusliigenditeks ja sünkroon- ehk püsikiirusliigenditeks. Poolliigendid jagunevad elastseteks ja jäikadeks. Elastne poolliigend kannab pöördemomenti üle nurga all elastse (enamasti kummist) elemendi deformatsiooni arvel, jäigal võimaldavad seda nuut- või hammasliite lõtkud. Liigendite arvu järgi jagunevad kardaanülekanded ühekordseteks (liigend on võlli ühes otsas) ja kahekordseteks (liigendid on mõlemas otsas). 3.3 Ristliigend Muutkiirusliigend (ristliigend)
amplituudmodulatsiooniga. Modemite andmeedastuskiirused olid veel 45 aastat tagasi 9 600 bit/s. Seejärel modemid 14 400 ja 28 800 bit/s ja tänaseks üle 30 000 bit/s. 33,6 kbit/s on lagi mida korralikud analoogliinid suudavad läbi lasta. Uus tehnoloogia 1997 aastast võimaldas andmete eelpakkimise tõttu tõsta analoog telefoniliinis edastuskiirust 56 kbit/s ni (kuni 72 kbit/s). Põhiparameetriteks on veel: ühilduvus (asünkroon, sünkroon jt); sobivus sidekeskkonnaga (analoogtelefoniliin või kõrgesagedusliinid); veaparandus (kui viga siis edastustsükkel korratakse seni kuni viga ei teki) ja andmetihendus; lisatööviisid (ümberlülitus telefonitööle, automaatne helistamine, automaatne vastuvõtt, numbrite mällusalvestus jt). Faksmodem (fax modem) personaalarvuti juurde kuuluv seade (või sisemine kaard), millega saab saatavastuvõtta elektroonilisi dokumente. Faksmodemi juurde kuuluv
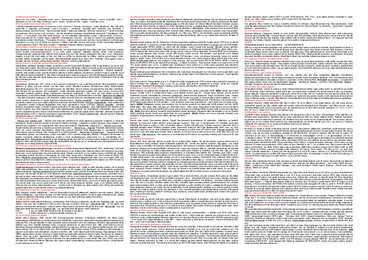
Joonis 2.11. Asünkroonmootori tunnusjooned otsevõrku käivitamisel. a M/n tunnusjoon; b I/n tunnusjoon [21] Mootori lubatav ülekoormus momendi järgi on 1,6...1,8 korda suurem nimimomendist. Suurema koormusmomendi puhul võib mootor nö vääratuda (vääratusmoment). Sel juhul kiirus väheneb järsult ning mootori mähised hakkavad väga kiiresti kuumenema. Joonis 2.11, b on näidatud voolu sõltuvust pöörlemiskiirusest. Nagu on näha, võib asünkroon-mootori otsevõrkkäivitusel käivitusvool olla nimivoolust In 4 ... 8 korda suurem. Asünkroonmootori sildiandmed Igale mootorile on kere külge ühendatud seda mootorit iseloomustavad sildiandmed, millelt saab kasutaja välja lugeda, kuidas mootorit tuleb kasutada. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine on toodud Joonis 2.12. Samuti on ära märgitud mootori nimesildile kantavad olulisemad andmed.
5% UK13%T1 := 18% UK23%T1 := 5% UKR12%T1 := 0.1% UKR13%T1 := 0.11% UKR23%T1 := 0.01% Süsteemiharu Koormused Liinid 6 (UnK=UnL) L: S..k := 600 10 6 SnK1 := 7 10 3 Un_l := 220 10 3 Un := 230 10 6 Sn K2 := 14 10 r1_l := 0.17 Asünkroon mootor 6 x1_l := 0.43 Pn_a := 5 10 3 x0_l := 1.29 Un_a := 10 10 l1 := 42 cos_a := 0.9 := 0.85 l2 := 80 ILR.In := 5.6 l3 := 64 ar.x := 0.1 Reaktor R: p := 1
Alalisvoolu rööpergutusmootori mehaanilised tunnusjooned- 10. Elektrimasin on energia muundur. Mis muudab elektrienergia mehhaaniliseks ja ka vastupidi. n=U-Ia(Ra+Rk)=f(Ia) ankru pöörlemiskiirus; M=CEIa=f(Ia)- mootori moment El.masinad jatatakse kahte rühma: 1) generaatorid, mis muundavad mehhanilie energa elektrenergiaks ja C 2)mootorid, mis töötavad elektrjõu mõjul. Mootorid jagunevad asünkroon, sünkroon ja alalisvoolu mootorid. Võrrandite kooslahendamise tulemusena saame mootori mehaanilised karakteristikud; s.o. langevad sirged Enim kastuatavamad mootorid on kolmefaasilised asünkroonmootorid. n=f(M). Mehaaniliste karakteristikute kalle sõltub ankruahela takistusest Ra+Rk. Nimipinge ja ergutusvoolu 11. Elektrimasinate liigutuse aluseks on kasutusala ja võimsus. Võimsuse järgi .
Võimsustegur on väga oluline näitaja elektrienergia ülekandel, mida suurem on võimsusteguri väärtus, seda vähem voolu tarviti tarbib ning seda efektiivsemalt elektrienergiat kasutatakse. Mootoritel jääb ta nimikoormusel vahemikku 0,8...0,9 ja tühijooksul 0,1...0,3. Aktiiv- ja reaktiivvõimsuse olemasolu tingib ka aktiiv- ja reaktiivenergia tarbimist võrgust. Reaktiivenergia on vältimatult vajalik enamlevinud vahelduvvoolumootorites –asünkroon- mootorites– magnetvälja loomiseks, kuid põhjustab võrgus suuremaid elektrienergia võnkumisi ja kadusid. Aktiiv- ja reaktiivenergia avaldatakse vastavalt W Pt a W Qt r Mõlema energia tarbimist toitevõrgust mõõdetakse eraldi arvestitega ning tasutakse nende eest erineva tariifi järgi
32. ARP 33. Sillad, jaoturid, kommutaatorid 34. HDLC, PPP, LLC 35. ATM 36. Võrkude turvalisus 37. Sümmeetrilise võtme krüptograafia, DES 38. Avaliku võtme krüptograafia, RSA 39. Autentimine 40. Digitaalallkiri 41. Sertifitseerimine 42. Turvaline elektronpost, PGP 43. E-kommerts, SSL, SET 44. Võrgukihi turtvalisus, Ipsec 45. Võrguhaldus, SNMP 46. ASN.1 47. Tulemüürid 48. Pidevad ja diskreetsed signaalid 49. Analoog- ja digitaalandmed 50. Mürad 51. Kodeerimine 52. Asünkroon- ja sünkroonedastus 1 1. Mitmekihiline arhitektuur Rakenduskiht -> Transpordikiht -> Võrgukiht -> Transpordikiht -> Rakenduskiht. Võimaldab lahutada arvutivõrgu ja riistvara konkreetsest rakendusest. Kõik komponendid on iseseisvad, neid saab sõltumatult asendada. Üks komponent (kiht) ei pea teadma, kuidas teine täpselt töötab. Olulised on ühe kihi poolt teisele pakutavad teenused. Alumine kiht pakub teenust ülemisele kihile (nt
krüpteerib kasutades oma salajast võtit. Saadab selle vahel. Turvalisuse tagamiseks kasutatakse SNMP sõnumite vastuvõtjale. Vastuvõtja küsib kasutaja avalikku võtit, millega krüpteerimist DES-iga ning autentimiseks kaasut. Salajast võtit ta dekrüpteerib kasutaja poolt krüpteeritud bitijada. Kui need ning räsifunktsiooni. vastavad, on kasutaja tuvastatud. 70. Asünkroon– ja sünkroonedastus 60. Digitaalallkiri Elektroonilisele sõnumile lisatav digitaalne Asünkroonülekanne - Andmete edastusviis, kus edastatakse üks kood, mis üheselt identifitseerib sõnumi saatjat. Nagu tavalise märk korraga ja ajavahemik kahe märgi edastamise vahel on käsitsi kirjutatud allkirja puhul, nii on ka digitaalallkirja ebaühtlane. Algus bitt ja lõpubitt annavad arvutile teada, millal
· Kui teljed nihkuvad teineteise suhtes Traktoritel antakse kardaanülekande abil pöördemoment esi- vüi tagasillale ja käitusvõllile. Kardaanülekanne koosneb: · Kardaanvõllidest · Võlliliigendidest · Vahetoest · Kompenseerivast ühendusest Väikeste vahekauguste korral vahetuge ei kasutata. Kardaanide või võlliliigendid jagunevad: · Täisliigendid 20-25 kraadi · Poolliigendid mõni kraad. Täisliigendid jagunevad: · Asünkroon- ehk muutkiirusliigenditeks. · Sünkroon- ehk püsikiirusliigenditeks Poolliigendid jagunevad: · Elastseks · Jäikadeks Elastne liigend kannab pöördemomenti üle elastse elemendi deformatsiooni abil. Elastsel ja jäigal on vedava ja veetava hargi pöörlemiskiirused erinevad. Erinevus sõltub telgevahelisest nurgast. Jäigal võib ülekande nurk olla 5-10kraadi, elastsel 3-5kraadi. Kompenseerivad ühendused tagavad kardaani pikkuse muutumise. Valmistatakse tavaliselt
Krüptograafia, algoritmid, võtmed autentimine..). Jagatud algoritm, mis otsustab, kuidas sõlmed kanalit jagavad. Millal sõlm võib midagi saata. Ideaalne multipöördusprotokolli korral: kui Tavaline tekst ja krüpteerimise võti > krüpteerimise algoritm > krüpteeritud tekst > dekrüpteerimise algoritm > dekrüpteerimise võti ja 60.Sünkroniseerimine, asünkroon- ja sünkroonedastus mingi sõlm tahab andmeid edastada, siis saab ta seda teha kiirusel, millega töötab ülekandev kanal. Kui mitu sõlme tahavad andmeid tavaline kest. Krüptograafia nö salajane kirjutamine. Symmetric-key (secret-key) krüptograafia. Asendussiffer mingi asi asendatakse Asünkroonülekanne - Andmete edastusviis, kus edastatakse üks märk korraga ja ajavahemik kahe märgi edastamise vahel on ebaühtlane.
Määrdenippel, 4. Kardaani liikuv nuuttoru, 5. Kardaani nuutvõll, 6. Tihend, 7. Tolmukatte, 8. Kardaani toru võll. Võlliliigendid jagunevad täis- ja poolliigenditeks. Täisliigenditel (Joonis 40) on kindlad õõtsumisteljed, mis võimaldavad võlli kallet et 20... 25°. Poolliigendite õõtsumisteljed on kindla orientatsioonita ja nendega ühendatud võlli kalle on vaid mõni kraad. Nad korvavad raami kõverusest ja paigaldusvigadest tingitud vildakusi. Täisliigendid jagunevad asünkroon- ehk muutkiirusliigenditeks ja sünkroon- ehk püsikiirus- liigenditeks. 39 Poolliigendid jagunevad elastseteks ja jäikadeks. Elastne poolliigend kannab pöördemomenti üle nurga all elastse (enamasti kummist) elemendi deformatsiooni arvel, jäigal võimaldavad seda nuut- või hammasliite lõtkud. Liigendite arvu järgi jagunevad kardaanülekanded ühekordseteks (liigend on võlli ühes
krüpteerimine - SNMP sõnumid on krüpteeritud kasutades DES algoritmi. Autentimine - arvutatakse ja saadetakse vastavalt HASH funktsiooniga arvutatud identifikaatoreid, kasutades jagatud salajast võtit (sümmeetriline krüptograafia). Tagamaks võtme kopeerimiskaitse arvutatakse iga sessiooni jaoks uus võti. Andmebaasi vaatamistaseme kontroll - SNMP osapool haldab ligipääsuõiguste andmebaasi, kus jagatakse õigusi erinevatele kasutajatele. 60. Sünkroniseerimine, asünkroon- ja sünkroonedastus -,+ Asünkroonse edastuse puhul saadetakse iga andmebitiga kaasa ka nn. start/stop bitid, mis määratlevad, millal algavad ja lõpevad andmed. Samuti sellega sünkroniseeritakse vastuvõtja ja saatja sama tegevuse jaoks. Signaale edastatakse baithaaval, sisaldades 2-3 juhtbitti ja 5-6 andmebitti. Pärast stop-signaali on tavaliselt teatud aeg vaikust. Sünkroonedastuse puhul saadetakse järjestikune info ilma vahedeta baitide vahel. Vastuvõtja
juhusliku ajavahemiku möödudes tehakse uus katse. /// ==> EHK Jaam, mis tahab midagi saata peab kõigepealt mingi ettemääratud aja jooksul kanalit kuulama, kas seal on mingi tegevus. Kui kanal on vaba, siis tuleb frame ära saata ja oodata vastust. Ja jaam saadab kõikidele teistele signaali, et nemad samal ajal midagi saatma ei hakkaks. Kui kanal on kinni, siis jaam peab saatmist edasi lükkama. 46. ATM (Asynchronous Transfer Mode) ==> asünkroonülekanne - Võrgutehnoloogia, kus andmeid edastatakse väikeste, fikseeritud suurusega (53 baiti) rakkudena (pakettidena). See võimaldab ühes ja samas võrgus edastada nii video-, audio- kui arvutiandmeid, ilma et ükski neist liini umbe ajaks. Andmeedastuskiirus ATM võrgus on 25 Mbit/s kuni 10 Gbit/s (OC-192c/STM-64), samas kui tavalises Ethernet'i kohtvõrgus on see maksimaalselt 100 Mbit/s. ///// Erinevalt TCP/IP võrgust, kus ühele
ja mingi juhusliku ajavahemiku möödudes tehakse uus katse. /// ==> EHK Jaam, mis tahab midagi saata peab kõigepealt mingi ettemääratud aja jooksul kanalit kuulama, kas seal on mingi tegevus. Kui kanal on vaba, siis tuleb frame ära saata ja oodata vastust. Ja jaam saadab kõikidele teistele signaali, et nemad samal ajal midagi saatma ei hakkaks. Kui kanal on kinni, siis jaam peab saatmist edasi lükkama. 46. ATM (Asynchronous Transfer Mode) ==> asünkroonülekanne - Võrgutehnoloogia, kus andmeid edastatakse väikeste, fikseeritud suurusega (53 baiti) rakkudena (pakettidena). See võimaldab ühes ja samas võrgus edastada nii video-, audio- kui arvutiandmeid, ilma et ükski neist liini umbe ajaks. Andmeedastuskiirus ATM võrgus on 25 Mbit/s kuni 10 Gbit/s (OC- 192c/STM-64), samas kui tavalises Ethernet’i kohtvõrgus on see maksimaalselt 100 Mbit/s. ///// Erinevalt TCP/IP võrgust, kus ühele sõnumile kuuluvad paketid
kaitselülitite elektromagnetiliste vabastite rakendusvoolude valik. Joonis 1.18 Kolmefaasilise asünkroonmootori kaitsmisel lühise eest sulavkaitsmetega on üks oluline puudus - kui üks sulavkaitsmetest rakendub või kui jõuahela üks faasijuhtmetest katkeb, jääb mootor tööle kahel faasil ülekoormusega ning võib üle kuumeneda. Sellest puudusest saab üle, kui kasutada spetsiaalset võtet asünkroon- mootori kaitsmiseks kahefaasilise töö eest. Selleks lülitatakse mootori lülitusskeemi faasi katkemise relee KA (joonis 1.19). Joonis 1.19 Faasi katkemise relee KA mähis lülitatakse mootori staatorimähise neutraalpunkti ja neutraaljuhtme vahele. Kui mootor töötab sümmeetrilises kolmefaasilises talitluses on pinge relee mähisel võrdne nulliga ning tema kontakt mootori liinikontaktori KM mähise ahelas suletud
objektide defineerimise keel); 3) SNMP protokoll (request/response mode; trap mode), millega vahetatakse kogutud haldamisinfot; 4) turvalisus ja administratsioon (krüpteerimine, autentimine..). Kogu info on hierarhiliselt hajutatud. Informatsiooni saamiseks ja edastamiseks liiguvad SNMP paketid võrgukese ja selle pealiku vahel. Turvalisuse tagamiseks kasutatakse SNMP sõnumite krüpteerimist DES-iga ning autentimiseks kaasut. Salajast võtit ning räsifunktsiooni. 60. Sünkroniseerimine, asünkroon- ja sünkroonedastus Asünkroonülekanne - Andmete edastusviis, kus edastatakse üks märk korraga ja ajavahemik kahe märgi edastamise vahel on ebaühtlane. Algus bitt ja lõpubitt annavad arvutile teada, millal märgi edastus algab ja millal lõpeb. Nt: A "0100 0001" saab "1 0100 0001 0" , lisa üks (või null, olenevalt paarsus bitil). Seda ülekandemeetodit kasutatakse kui andmeid saadetakse katkendlikult mitte ühe jadana.
sagedusmuundurid, mis koosnevad võrgu pinge alalidist ja alaldi väljundisse ühendavast autonoomsest vaheldist. Paikneb mis salvestab mis salvestab enengiat ja silub voolu ja pinget. Vahetud sagedusmuundurid ei sisalda alalisvoolu vahelüli ega ka energiasalvestit. Kasutatakse seda võtet väga suure võimsusega mootorite korral. Sagedusmuundureid kasutatakse töömasinates, kus on oluline kiiruse regureemine, kus juures mootoritena võidakse kasutada, nii asünkroon kui ka sünkroonmootoreid. Enamkautatav deapasoon on 20-200 Hz, kuid on ka mootoried mis võivad töötada mitu KHz. Suuremate võimsustega mootoreid töötavad ka sageli kõrgentatud pingega kuni 10 KV. Kõrgentatud sagedusega mootorid mis töötavad sagedustel kuni mõni KHz peavad olema konstrueeritud töötamise kõrgematel sagetustel sest mida kõrgemad on sagedused seda suuremad on kaod ning ja magnet ahelad tuleb seetõttu valmistada õhamatest plekkidest
mustes. Kui aktiivvõimsuse bilanss on seotud tihedalt süsteemi sagedusega, siis reak- tiivvõimsuse bilanss on seotud põhiliselt pingega. Pinge reguleerimiseks läheb lisaks pinge reguleerimisseadmetele vaja reaktiivvõimsuse reservi, et rahulda- da bilansi võrrandit (3.3) normaalpinge juures. Lisaks aktiivvõimsusele vajavad paljud tarbijad reaktiivvõimsust elektro- magnetvälja tekitamiseks. Suuremad reaktiivvõimsuse tarbijad on asünkroon- mootorid, trafod, muundurid, induktsioonahjud, keevitusagregaadid jm. Reaktiivvõimsuse allikateks elektrisüsteemis on elektrijaamade generaatorid ning mitmesugused reaktiivvõimsuse kompenseerimisseadmed. Isegi elektrisüsteemi normaalse koormuse puhul on võrgus üsna suured reak- tiivvõimsuskaod ja elektrijaamade generaatorid ei suuda alati katta süsteemi kogu reaktiivvõimsuse vajadust. See pole ka majanduslikult otstarbekas, kuna
P = 3 U I = 3 230 7,5 = 3000 W = 3 kW. Kui ahjud on tähtühenduses, siis Ul 230 Uf = = = 133 V, 3 3 Uf 133 If = = = 2,5 A, Rf 53 Il = 3I f = 3 · 4,3 = 7,5 A ja PY = 3 U I = 3 230 2,5 = 1000 W = 1 kW. Selgub, et tähtühenduse korral on võimsus väiksem P 3 = = 3 korda. PY 1 Seda asjaolu kasutatakse praktikas mõnikord võimsuse reguleerimiseks. Näiteks on asünkroon- mootori käivitamisel kasutusel niinimetatud täht- kolmnurk-lülitid (Y/-lülitid). Mootor ühendatakse algul tähte ja siis kolmnurka. Nii on käivitamisel voolutõuge (aga ka pöördemoment) kolm korda väiksem. 7.5 Pöördmagnetväli Kolmefaasilise voolu üheks tähtsamaks omaduseks on magnetvälja tekitamine, mis ruumiliselt pöörleb. Niisugust välja nimetatakse pöördmagnetväljaks ehk lihtsalt pöördväljaks. Pöördmagnetvälja paigutatud juhe hakkab
R.i s Joonis 1 .4. Lüļrisrootoriga asünkroorurrootori täpsustatud aseskcent Jaotatud rootoriahela paran-reeūite määranriseks on TTĮ] elektriajamite ja jõuelektr'oonika institutrdis väĮja töötatud hägusIoogilisel aproksimeerimisel põhirrev nretoodika Ill. niida saab teadaoleva lnehaanilise karakteristiku puhul rakendada kõigi lüliisrootoriga asünkroon- masitrate aseskeemi parameetrite määramiseks. Näiteks, AS Voltas toodetava 7,5 kW võimsusega 4-pooluselise mootori I32M4 täpsustatud aseskeenli kohta orr leitud järgnrised paranleetrid: Är:0,23; 1,.r:0.0038, L,r:0,l7; Lr:0,00i5; Ä,. = 0,065, ]'r2:0,0047 R11:2'4; R,.2=0,28. Mootori nimitoitepinge on seejuures 220 v, ninliļibistus 0,033; nimikasutegLĮT ņ: 0,88 ja cos rpn:0,86. ll
dünaamilised näitajad. Tänu pooljuhtide tehnoloogia kiirele arengule viimaste aastate jooksul on võimalik tõhusate pooljuhtmuundurite kasutamine suurema võimsusega mootorite juhtimiseks. See puudutab eeskätt jõupooljuhtlüliteid, signaaliprotsessoreid ja mikrokontrollereid ning pooljuhtseadiste juhtlülitustega vahetult ühendatavaid loogikalülitusi. Asünkroon-, sünkroon- ja alalisvooluajamid eristatakse neis kasutatava mootori tüübi järgi asünkroonmootorid, sünkroonmootorid või alalisvoolumootorid. Tänapäeval on tööstuses kõige laiemalt levinud jõuallikateks asünkroonajamid. Harilikult kasutati asünkroonmootoreid konstantse kiirusega rakendustes, kuna puudusid seadmed nende kiirete dünaamiliste protsesside juhtimiseks