Leidsid 33 sarnast õppematerjali, mis on seotud failiga "Nihkeanduri kalibreerimine". Need materjalid aitavad sul teemat sügavamalt mõista.
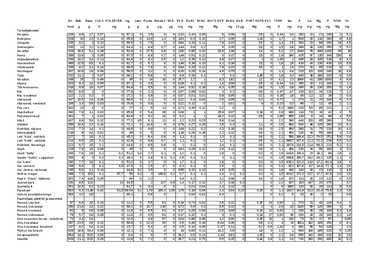
koormatud, 8000, sõltuvus, mõõteviga, 40000, 36000, 32000, 28000, 24000, delta, labor, 2704, pöördenurk, nominaalne, piirviga, uvvi231 6,6243 6,0459 6,6066 0,5 0,0177 0,442 -0,5607 0,0083 264 7,5772 7,0654 7,5504 0,5 0,0268 0,67 -0,485 0,0083 297 8,5255 8,1936 8,4942 0,5 0,0313 0,782 -0,3006 0,0082 330 9,4302 9,4169 9,438 0,5 -0,0078 -0,195 -0,0211 0,0082 C = mV/deg 28,6 U0 9,467 Rk= kO 90000 c*331 R= kO 40000 Uv V (koormamata) 10 9 8 7 6 5 Uv V Uv V 4 3 2 1 0 0 30 60 90 120 150 180 210 240 270 300 330 360 Nurk
21873,112 18126,89 5,166 4,654 17596,54 25498,489 14501,51 6,023 5,462 19869,21 29123,867 10876,13 6,879 6,323 22003,55 32749,245 7250,755 7,735 7,257 24011,81 36374,622 3625,378 8,592 8,288 25904,85 40000 0 9,448 9,448 27692,31 Üldine iseloomustus Nihkeandur sisaldab reostaatmõõtemuunduri, mis muundab pöördliikumise takistuse väärtuseks ning elektriskeemi, mis muundab takistuse väärtuse pingesignaaliks U. Töö eesmärk Selgitame, kui palju anduri tegelik karakteristik U() erineb temale omistatud nimikarakteristikust Un()=C ja kui täpselt seda erinevust saab mõõta. Skeem Arvutused: E = 24 V R = 40 k Rk = 90 k C = 31,4 mV/° U=C* min = 0°
Õppejõud: Rein Jõers Tallinn 2011 Üldine iseloomustus Nihkeandur sisaldab muunduri, mis muundab pöördliikumise pingesignaaliks U. Töö eesmärk Selgita, kui palju anduri tegelik karakteristik U() erineb temale omistatud nimikarakteristikust Un()=C· ja kui täpselt seda erinevust saab mõõta. Töö käik C = 28,6 mV/deg Rk = 90000 R = 40000 nr i Uvi(V) Uki(V) Nominaalne i Viga Uv u()(°) u(Uv)(V) v k (°) Un= C·(V) (°) 1 0 0,01249 0,05952 0 0,5 0,000011249 0,204124 0,00000649 0,0125 0,0595 2 33 0,96048 0,92195 0,9438 0,5 0,000126862 0,204124 0,00007324 0,0167 -0,0219
u (U v ) = 3 (U k ) u (U ki ) = 3 Koormamata anduri v = Uv C* = Uv Un Koormatud anduri k = Uk C* = Uk Un u ( v ) = ( u (Uvi ) ) 2 + ( C u ( ) ) 2 U ( v) = 2 u ( v ) Koormamisel tekkiva vea leidmine arvutuslikult: R1 U R2 Rk V 3 R R1 () = 330 R1 (0) = 0 R1 (330) = 40000 R2 = R - R1 R2 Rk R2 k = R2 + R k R 2 Rk R12 k = R1 + R2 k = R1 + R2 + R k U U R + 330 Rk I 12 k = = = -330 U R12 k R R R (- 330 R - 108900 Rk + 2 R) R1 + 2 k R2 + R k U Uk (arv) = I 12 k R2 k = -330 Rk
0,2960 0,1709 330 8,6395 8,6278 8,6361 0,0034 - 0,0891 0,0890 0,2041 0,0020 - 0,0057 0,0083 0,0048 Tähistused ja kasutatud valemid pöördenurk- antud Uv mõõtetulemus koormatama väljundi puhul-mõõtsin Uk mõõtetulemus koormatud anduriga- mõõtsin Un nominaalne väljundpinge Un=C* v koormamata anduri viga v=Un-UV k koormatud anduri viga k=Un-Uk Uv pinge mõõtmise piirviga uv=(0,01+0,002(10/UV-1))*Uv Uk pinge mõõtmise piirviga uk=(0,01+0,002(10/Uk-1))*Uk nurga mõõtmise piirviga =0,5 u() nurga standardmääramatus u()= /=0,2041 u(Uv) pinge standardmääramatus u(Uv)= v/
Skeem Arvutused: E = 24 V R = 40 k Rk = 90 k C = 31,4 mV/ U=C* min = 0 max = 330 Mõõdetud pöördenurk i Mõõdetud pinge koormamata Uvi (V) Mõõdetud pinge koormatult Uki (V) Pinge väärtus arvutuslikult (nominaalne väljundpinge) Uni = C Pöördenurga piirviga± 0,5° Viga sisendühikutes Uvi = |Uvi Uni| Koormamata anduri mõõteviga väljundühikutes i = |Uvi / 0,040| Koormatud anduri mõõteviga Uki = |Uki Uni| Uvvi multimeetri viga u(U) Standardmääramatus u(U) = Uvi/ u() Standardmääramatus u()= u(Uvi) - Liitstsandardmääramatus koormamata katsest U(Uvi) Laiendmääramatus koormamata katsest katteteguriga k=2 U(Uvi) = 2 x u(Uvi) Uki' koormamisel tekkiv viga arvutuslikult lähtudes R, Rk, väärtustest k Koormatud anduri katsest arvutatud mõõteviga k=Uk - C Mõõtetulemused: i (°) Uvi (V) Uki (V) 0 0.00924 0,00864 33 0,76401 0,73456
v=Uv-Un k=Uk-Un Koormamisel tekkiva vea k' leidmine lähtuvalt Uo, R, Rk väärtustest: R=40000 () R=R1+R2 R1k=(R1)II(Rk)= (paralleelühendus) =R1*Rk/(R1+Rk) R2k=(R1)II(Rk)= (paralleelühendus) =R2*Rk/(R2+Rk) R1()=R* /330 R1 (0)=0 () R1 (330)=40000 () R2=R-R1 U()=Uo*R1k/(R1k+R2) Uo=max Ui=U(=330o) Uo=330*C=7,16 (V) k'= R1 R1k R2 R2k k' 0 0 40000 27692 0 4000 3830 36000 25714 0,027308 8000 7347 32000 23607 0,094611 12000 10588 28000 21356 0,182676 16000 13585 24000 18947 0,275128 20000 16364 20000 16364 0,35685 24000 18947 16000 13585 0,412692
pöördliikumise takistuse väärtuseks ning elektriskeemi, mis muundab takistuse väärtuse pingesignaaliks U. Töö eesmärk: Selgitame, kui palju anduri tegelik karakteristik U() erineb temale omistatud nimekarakteristikust Un() = C* ja kui täpselt seda erinevust saab mõõta. Töökäik: E = 24 V R = 40 k Rk = 90 k C = 31 mV/° U=C* Koorma- Koormatud mata Viga Katse Nominaal- anduri Nurk Uv Uk anduri Uv sisend mõõteviga nr. mõõteviga -ühikutes Uk ne Un i
KTUD.RH. küllastatud rasvhapped Toitainete sisaldus tabelis tähendab... C16 palmitiinhape 0 C18 steariinhape MKTA.RH. monoküllastamata rasvhapped PKTA.RH. polüküllastamata rasvhapped C18:2 linoolhape C18:3 linoleenhape VL.KIUDAINED vees lahustuvad kiudained RET.EKV. retinooli ekvivalent NIATS.EKV. niatsiini ekvivalent PANT.HAPE pantoteenhape R% sisaldab x% rasva KLASS E tailiha sisaldus üle 55% KLASS O tailiha sisaldus 40-45% (0.9) söödav osa 90% Sul. sulatatud Rasvas. rasvasusega Toitainete sisaldus tabelis tähendab... vastava toitaine sisaldus antud toiduaines on 0 või minimaalne andmed toitaine sisalduse kohta antud toiduaines puuduvad ENERGIA (kcal) ENERGIA (kJ)
En. Valk Rasv. C18:3 KOLESTER. mg Lakt. Kiuda Ret.ekv Vit.D Vit.E Vit.B1 Vit.B2 NIATS.EKV Vit.B6 Vit.B PANT.HAPE Vit.C TUHK Na K Ca Mg P RÄNI Fe kcal g g G mg g g g g g mg mg mg Mg mg 12 g Mg mg G mg mg mg mg mg Mg mg Teraviljatooted. Nisujahu 328 9,9 1,7 0,07 0 67,1 0 3,5 0 0 0,32 0,43 0,05 5 0,08 0 0,5 0 0,44 0,4 150 13 21 100 2 5,2 Rukkijahu 328 10 2,3 0,14 0 65,6 0 13,6 1,1 0 1,63 0,3 0,13 2,7 0,35 0 1,34 0 1,7 1 500 30 110 360 8 4,9 Odrajahu
Nisujahu Rukkijahu Odrajahu Grahamjahu Nisukliid Karna ENERGIA, kcal 328,3 328,1 334,8 335,4 328,7 357,6 ENERGIA, KJ 1373,6 1372,6 1400,9 1403,4 1375,3 1496,1 VESI, g 14 14 14 14 14 14 VALGUD, g 9,9 10 9,2 11 16,6 13,8 RASVAD, g 1,7 2,3 3 3,2 5,1 3 KTUD,RH., g 0,19 0,3 0,54 0,38 0,82 0,4 C16,g 0,17 0,29 0,52 0,34 0,77 0,37 C18,g 0,02 0 0,02 0,03 0,05 0,02 MKTA,RH, g 0,24 0,23 0,26 0,48 0,81 0,85 PKTA,RH, g 0,71 1,15 1,39 1,44 2,62 0,94 C18:2, g 0,65 1,01 1,26 1,31 2,43 0,89 C18:3, g 0,
0,041583595 0,08316719 0,045818103 0,091636206 0,050024856 0,100049712 0,054179786 0,108359572 R=40k=40 000 k= Arvutatud Uk 0,00012 0 40000 0 0 -0,04855 4000 36000 3829,8 0,8826 -0,1261 8000 32000 7346,9 1,7139 -0,2366 12000 28000 10588,2 2,5186 -0,3557 16000 24000 13584,9 3,3177 -0,4605 19878,8 20120,2 16363,6 4,1175 -0,5283 23878,8 16121,2 18947,4 4,9594
Aruanne ai nes ISS0050 Mõõtmi ne Õppejõud: Rein Jõers Tallinn 2011 Üldine iseloomustus Nihkeandur sisaldab muundurit mis muundab pöördliikumise pingesignaaliks U. Töö eesmärk Selgita, kui palju anduri tegelik karakteristika U() erineb temale omistatud nimikarakteristikust Un()=C ja kui täpselt seda erinevust saab mõõta. Töö käik C = 28,6 mV/deg Rk= 90000 R= 40000 ,kus Xp on piirkond ja X näit. Piirkonnal 0,1 V on a =0,02 ja b = 0,01, piirkonnal 1V ja 100V a=0,015V ja b= 0,002V ning piirkonnal 10V a=0,01 ja b= 0,002. Standardmääramatused Mõõtevead Liitmääramatus Laiendmääramatus U0 = U(=330º)=9,4208 k' = U'-Un Un=C* R2=R-R1 nr UV UK UV v k k' Un u(v) U(v) u() u(UV) R1K R1 R2 U'
504.064.38 (, , , , , .), . ..................................................................................................4 1. ..............5 1.1. ....................................................................................5 1.2. .........................................................................................5 1.3. .....................................................................................6 1.4. ....................................................................................7 1.5. ........................................................................................7 2. 30 /.....................................................................9 2.1. ..................................................................................9 2.2. .......
19 355 0,000 0,000 0,00 0,5 0,00 0,000 0,000 1. Katse number 2. Mõõdetud pöördenurk 3. Mõõdetud pinge koormamata 4. Mõõdetud pinge koormatult 5. Pinge väärtus arvutuslikult (nominaalne väljundpinge) Ui = C * I 6. Pöördenurga lugemise täpsus 7. Viga sisendühikutes Uvi = |Uvi Ui| 8. Koormamata anduri mõõteviga väljundühikutes i = |Uvi / 0,0285| 9. Koormatud anduri mõõteviga Uki = |Uki Ui| Ui = Ui U(i) = Ui C * i Ui = U(i + i) Ui = Ui U(i) = Ui ± Ui C(i ± i) = Ui Ci ± Ui ± CI 4.000 3.500 3.000 2.500 2.000 1.500 1.000 0.500 0.000 0 100 200 300 400 140 120 100 80 60 40 20 0 0 100 200 300 400 8.000 7.000 6.000 5.000 4.000 3.000 2.000 1.000 0.000 0 100 200 300 400 0 0,000
51- Omanik/FI 10- E või ev Pm.maa, 12-Pm.maa, juht 1 - omandis, 11-Pm.maa, ühiskasutuse Maakasutus v_toojou_a jrk Aasta 5_Maakond ha renditud, ha s, ha kokku astauhik X1 X3 X4 X5 X6 X7 X8 1 2000 Jõgeva 0,00 2 177,00 0,00 2 177,00 0,00 2 2000 Jõgeva 0,00 872,00 0,00 872,00 0,00 3 2000 Jõgeva 46,70 38,00 0,00 84,70
Pikett 0+00 1+00 2+00 2+38,03 3+00 3+75,86 4+00 4+45,16 5+00 5+25,76 6+00 7+00 7+20 7+66,2 8+00 9+00 9+14,44 10+00 10+98,72 11+00 12+00 12+94,44 13+00 14+00 15+00 16+00 17+00 18+00 19+00 19+28,57 20+00 21+00 21+28,57 21+55 22+00 23+00 23+65,17 24+00 25+00 25+7,81 26+00 26+11,43 26+25,96 26+27,7 26+55 26+59,64 26+75 27+00 27+0,22 27+32,3 27+34,07 27+48,82 27+50 28+00 29+00 30+00 Töömahtude koondtabel Algpikett 0+00 1+00 2+00 3+00 4+00 5+00 6+00 7+00 8+00 9+00 10+00 11+00 12+00 13+00 14+00 15+00 16+00 17+00 18+00 19+00 20+00 21+00 22+00 23+00 24+00 25+00 26+00 27+00 28+00 29+00 Masinvahetuste arvu määramine Kasvupinnase eemalda
1. 1. N n . , m k . N = 20, n = 5, m = 4, k = 2. . . C nk C Nm--nk C 52 C152 5!15!4!16! 5 4 3 15 14 4 P ( A) = = = = = 0,217 . CN m C 204 2!3!2!13!20! 2 20 19 18 17 2. n , k . , m . n = 10, k = 4, m = 2. . . C km C 42 4!2!8! 43 2 P ( A) = m = 2 = = = = 0,133 . Cn C10 2!2!10! 10 9 15 3. . 15% , 25%, 30%. , ( ) . . : A1 ; A2 ; A3 . , ( ) P ( A) = P ( A1 A2 A3 + A1 A2 A3 + A1 A2 A3 ) = = P( A1 A2 A3 ) + P( A1 A2 A3 ) + P ( A1 A2 A3 ) = = P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) + P ( A1 ) P ( A2 ) P ( A3 ) = = 0,85 0,75 0,3 +
(1 + ) - (1 + 0,7) - 0,7 n 95 Kuna Pn>P, st 4000>3936, siis valitud mootor sobib ja ei kuumene üle ka 50 ºC keskkonnatemperatuuri juures. Ülesanne 6.11 Valida mootor püsivkoormusega kestvas talituses, S1 töötavale lintkonveierile. Ajamimootoriks valida asünkroonmootor, millelt käitatakse konveieri veotrummel reduktori vahendusel, ülekandearv i = 7,8, kasutegur r = 0,96. Koormatud lindi korral on konveieri takistus Ft = 360 N, lindi kiirus vt = 3,25 m/s. Veotrumli läbimõõt Dtr = 675 mm. Töömasina takistusmoment Ft Dtr 360 0,675 Mt = = = 121,5 Nm. 2 2 Taandame töömasina takistusmomendi elektrimootori võllile Mt 121,5 M t' = = = 16,23 Nm. i r 7,8 0,96
Time Channel 1 Seconds °C 0 12,62 1 12,6 24 2 12,57 22 3 12,53 4 12,5 20 5 12,47 18 16 6 12,43 14 7 12,4 12 8 12,36 10 9 12,33 t,C 8 10 12,29 11 12,26 6 12 12,24 4 13 12,2 14 12,16 2 15 12,13 0 16 12,1 0 200 400 600 800 1000 1200 14 17 12,07 -2 18 12,03 19 12 -4 20 11,
TAKISTITE LIIGITUS Takistuse muutumise seaduspärasuse järgi liigitatakse: 1. Lineaarsed takistid Lineaartakistit läbiv vool on võrdeline pingega U, 2. Mittelineaarsed takistid Mittelineaartakistite vool sõltub välismõjuritest: · Rakendatud pingest varistoridel · Temperatuurist termotakistitel · Valguskiirgusest fotottakistitel Otstarbelt ja ehituselt jagunevad takistid: 1. Püsitakistid mille takistus on kindla suurusega 2. Muuttakistid mille takistus on sujuvalt muudetav Muutumise graafik võib olla: 1. Lineaarne 2. Mittelineaarne Takistuse keha kuju poolest liigituvad takistused: 1. Kihttakistid mille isoleerainest alus on kaetud takistus materjali kihiga 2. Masstakistid mille takistus keha koosneb tervenisti takistuse materjalist 3. Termotakistid on kihttakistitel ja masstakistitel süsinike ja poori segu. Metall osiidi, grafiidi või tahma paagutatud segu. Pooljuht materjal
2018 p 265,5 ln t sat 610,5 , ºC, kui p<610,5Pa p 21,875 ln 610 ,5 Veeauru küllastusrõhu psat sõltuvus temperatuurist t. t, ºC psat, Pa (temperatuuri kümnendikel) 0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 -25 63 62 62 61 60 60 59 59 58 57 -24 69 69 68 67 67 66 65 65 64 63 -23 77 76 75 74 74 73 72 72 71 70
_________________________________________________________________________ Osavahemik Päevade arv Nimiväärtus (EUR) Osaperioodide intress ____________ _______________ __________ ______________ 10. märts-18. juuni 22+30+31+17 =100 3000 58,33 EURi (1) 18. juuni- 29. sept. 12+31+31+28 =102 3000+5000= 8000 158,67 EURi (2) 29. sept.- 15. dets. 2+31+30+14 = 77 8000+7000=15000 224,58 EURi (3) ________________ Kokku 441,58 EURi _________________________________________________________________________ 100
R 2 ekv K PJ = R1 + R 2 ekv R 2 Rt R 2 ekv = R 2 + Rt 52 Logaritmiline sageduskarakteristik. (tegelikult neid on kaks) ASK amplituudi sag.karak. Süsteemi väljund sisendpinge amp- lituudide suhte sõltuvus sagedusest f (nurksagedusest ). FSK faasi sag.karak. Süsteemi väljund ja sisendpinge faasinihke sõltuvus sagedusest (f või ). Logaritmiline on sageduse mastaap! Põhjus: muidu suur sag. diapasoon ei mahu ära. Ühik (dekaad) _____________________________________________________ 0,1 1 10 100 1 10 100 1 f (või ) Hz Hz Hz Hz kHz kHz kHz MHz log.mastaabis Log.ASK puhul on Y teljel 20log10 (pingeampl.suhe) ühik
Nii on täringuviske resultaat juhuslik suurus. Tingituna juhuvigadest on ka üksikmõõtmise tulemus juhuslik suurus. Näide 1. Oletame, et mõõtsime multimeetriga füüsikahoones 8 minuti jooksul n = 100 korda vahelduvpinget. Katsetulemuste jaotus on kujutatud joonisel 2. Näeme, et vahelduvpinge väärtus ei ole ajas konstantne vaid fluktueerub mingi väärtuse ümber, s.t on juhuslik suurus. Antud näites on selle põhjuseks nii juhuvead kui ka vahelduvpinge väärtuse sõltuvus kogu võrgus tarbitavast võimsusest. 228.8 228.6 U Pinge, /V/ 228.4 228.2 228 0 1 2 3 4 5 6 7 8 aeg, /min/ Katsepunktid Keskmine Joonis 2. Võrgupinge muutumine ajas. Mõõtetulemus on reaalse katse tulemus
1.1. Metalsed materjalid 1,0%. Lisandid viiakse terasesse selle desoksüdee- rimise käigus; ühinedes terases oleva hapnikuga lähevad nad räbusse. Lahustudes rauas paran- 1.1.1. Rauasüsinikusulamid davad nad terase omadusi. Räni lahustununa rauas tõstab terase Teras voolavuspiiri, mis aga halvendab terase külmdefor- meeritavust (stantsimisel, tõmbamisel). Seetõttu Lisandid terases kasutatakse deformeerimise teel valmistatavate Raud on metallidest tähtsaim, kuid puhtal kujul detailide puhul väikese ränisisaldusega teraseid. kasutatakse teda vähe
kontsentratsioonitegur. Nagu katsed näitavad, ei vähenda pingekontsentratsioon staatilise koormuse puhul märgatavalt ristlõike kandevõimet. Kuna pinge tipp on koondatud väga kitsale alale, siis kõrval paiknev vähemkoormatud materjal ei võimalda pingetipu kohal suuri deformatsioone ja materjal ei saa seetõttu hakata voolama. Väsimustugevusele avaldab pingekontsentratsioon seevastu suurt ebasoodsat mõju ja seetõttu tuleks vahelduvalt koormatud elementide puhul pingekontsentraatoreid vältida. Valts- ja keevisprofiilides esinevad sageli algpinged. Algpinged telivad näiteks keevitamisel ristlõike eri osade erinevast jahtumiskiirusest, valtsprofiilidel tingituna valtsimistehnololoogiast jne. Algpinged on ristlõike ulatuses alati tasakaalustatud. Tänu sellele nad staatilisel koormamisel kandepiirseisundile olulist mõju ei avalda piirseisundis on pingejaotus nii algpingetega kui ka pingeteta ristlõikes praktiliselt ühesugune
Materjalitehnika instituut Materjaliõpetuse õppetool MTM40LT Ove Hillep Optiliste sensorite kasutamine veearvestite taatlusprotsessis Bakalaureusetöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinna Tehnikaülikool 2014 AUTORIDEKLARATSIOON Deklareerin, et käesolev lõputöö on minu iseseisva töö tulemus. Esitatud materjalide põhjal ei ole varem akadeemilist kraadi taotletud. Töös kasutatud kõik teiste autorite materjalid on varustatud vastavate viidetega. Töö valmis Lauri Lillepea juhendamisel “.......”....................201….a. Töö autor ............................. allkiri Töö vastab bakalaureusetööle esitatavatele nõuete
MÕÕTMESTAMINE JA TOLEREERIMINE 2 ×16 tundi Teema Kestvus h 1. Sissejuhatus. Seosed teiste aladega 2 Mõisted ja terminiloogia. GPS standardite maatriksmudel 2. Geometrilised omadused. Mõõtmestamise 2 üldprintsiibid. Ümbrikunõue, maksimaalse materjali tingimus 3. ISO istude süsteem. Tolerantsiväljad 2 4. Istud. Võlli ja avasüsteem 2 5. Soovitatavad istud. Istude rahvuslikud süsteemid 2 6. Istude kujundamise põhimõtted 2 Istude analüüs ja süntees 7. Liistliidete tolerantsid. 2 Üldtolerantsid 8. Geomeetrilised hälbed. Kujuhälbed. 2 Suunahälbed 9. Viskumise hälbed. Asetsemise hälbed. Lähted 2 Nurkade ja koonuste hälbed ja tolerantsid 10. Pinnahälb
.................................................. 32 5.3 Surutud ja painutatud varda stabiilsus............................................................................................ 34 5.4 Tõmmatud ja painutatud varda stabiilsus....................................................................................... 34 6. LIITED................................................................................................................................................. 35 6.1 Põiksuunas koormatud liidete kandevõime .................................................................................... 41 6.1.1 Puit-puiduga ja (puidupõhjaline)plaat -puiduga ühendused ....................................................... 42 6.1.2 Puit-teras ühendused ................................................................................................................... 44 6.2 Naelliited ..........................................................................................................
mõõtmed ja kontrollida tingimust V = R. Kui V > R, tuleb mõõtmeid suurendada ja vastupidisel juhul vähendada kuni tingimus on täidetud. Otseselt mõõtmete määramist komplitseerib asjaolu, et nii R kui ka V sisaldavad vundamendi mõõtmeid või nende suhteid. V sisaldab mõõtmetest sõltuvat ja seega algselt teadmata vundamendi kaalu. 11 Lihtsamatel juhtudel (tsentriliselt koormatud lintvundament, üksikvundament dreenimata tingimustes) saab mõõtmed, vähemalt ligikaudu, leida otseselt. 4.4.1 Tsentriliselt koormatud lintvundament Enamasti on koormus lintvundamendile tsentriliselt rakendatud. Juhul kui mõjubki alalisest koormusest tingitud moment, on võimalik vundamendi talla nihutamisega e e2 e1 e
5. Kahekordsete kogumislattidega jaotla skeem Suuremates jaotlates leiab kasutamist kahekordsete kogumislattidega jaotla skeem (vt jn 5.5). Selles jaotlas on võimalikud erinevad kasutusvariandid: - Kõik fiidrid on ühendatud ühele kogumislattide süsteemile I s või II s. Lattidevaheline võimsuslüliti Q5 võib olla sisse lülitatud ja koormust mitte kandev latisüsteem on pingestatud ning toimub pidev isolatsiooni kontroll. Koormatud latisüsteemi lühise korral on võimalik fiidrid üle viia teisele latisüsteemile. - Fiidrid on latilahklülitite abil jaotatud võimalikult võrdse koormuse alusel süsteemide vahel nii, et lülitit Q5 läbiv vool oleks minimaalne. Seda kasutusviisi nimetatakse fikseeritud ühendustega skeemiks. Skeem meenutab ühekordsete sektsioneeritud kogumislattidega jaotla skeemi, milles sektsioonilüliti rolli täidab Q5
10.1 Poldi lõikekandevõime ........................................................................................................................ 55 10.2 Poldiava serva muljumiskandevõime .................................................................................................. 55 10.3 Poldi tõmbekandevõime ..................................................................................................................... 57 10.4 Tõmbe- ja lõikejõuga üheaegselt koormatud poldi kandevõime........................................................ 57 11. ALGHÄLVED JA TEIST JÄRKU MÕJURID...................................................................................................... 58 12. POSTIDE JA RAAMIDE NÕTKEPIKKUSED .................................................................................................... 61 13. ENIMKASUTATAVATE TERASPROFIILIDE TABELID .................................................................................... 63