HALLANDUR SISUKORD •Hallanduri ajalugu •Mis on Hallandur •Kasutusalad •Eelised ja puudused •Kasutatud kirjandus HALL ANDURI AJALUGU Edwin Herbert Hall (1855-1938) oli Ameerika füüsik, kes töötas Harvardi ülikoolis (1881-1921) ja tegi töid termoelektri, metallide elektri- ja soojusjuhtivuse ning galvanomagnetiliste efektide kohta. 1879. aastal avastas ta omanimelise efekti, mille kohaselt magnetväljas asuvas ning konstantse vooluga kehas, mille liikumine on takistatud, tekib voolu ja magnetväljavektoriga ristisuunaline potentsiaali gradient, s. o. magnetvooga võrdeline Halli pinge. MIS ON HALLANDUR Halli andur on mõõteseade, mille töö põhineb Halli efektil (elektrivälja tekkimine magnetväljas asetsevas vooluga juhis). KASUTUSALAD Magnet- ja elektriväljade tugevuse mõõtmisel; Vooluandurites; Asukoha määramiseks; Kiiruse leidmiseks;...
Mootori elektroonika (leo nirg) - Mootori elektroonika ülesanne on valmistada õige küttesegu.. ! - Väntvõlli pöörlemis kiirus (ennegi speed sensor) Kui signaal ära kaob siis mootor jääb seisma, kui andur ei toimi siis mootor ei käivitu. Anduriasjanduseks nimetame siin füüsika ja keemiasuuruste elektrlist mõõtmist: Mõõtesuurus võib olla nt. - Temperatuur' - Pöörlemissagedus - Rõhk - Nurk vm asend - Voolukiirus - Kiirendus ja vibratsioon - Keemiline koostis Anduri ülesanne on muuta mehaaniline olek, elektriliseks signaaliks.! - Läb õhufiltri siseneva õhu hulga anduri signaalist arvutile vastavalt tegelikuele õhukogusele, mis antakse mootori silindritele - Mootori temperatuuri anduri signaalist- näiteks külm mootor vajab rikkamat küttesegu - Välisõhu temperatuuri andur signaalist näiteks kuumem õhk on hõredam ja sellisel juhul tuleb õhu hulka pihustada vähem kütust - Välisõhu rõhu anduri sign...
SÜÜTESÜSTEEMID Süütesüsteemi ülesanne on silindris oleva töösegu õigeaegne süütamine elektrisädemega. Küünla elektroodide vahel sädeme tekkitamiseks on vaja tõsta pinge üle 12 tuhande voldi. Klemm nr.15 süüte sisselülitamisel tekib pinge . Nr.1 on maandus.Kõrgepinge ehk sekundaarmähises , mille keerdude arv ulatub mitmekümne tuhandeni , tekib 10 000 80 000 V kõrgepinge. Mõnesaja keeruga madalpinge ehk primaarmähis kuumeneb rohkem ja on paigaldatud välimiseks.Induktiivne süütepool koosneb : raudsüdamikust,madalpingemähisest ja kõrgepingemähisest. Sädemetekkimine Suletud lüliti korral läbib vool madalpinge mähist ja tekitab ümber raudsüdamiku võimsa magnetvälja.Peale lüliti avanemist madalpinge pool katkeb , magnetväli kaob , kahaneb magnetväli , indutseerib madalpinge mähises 150-300 volti pinge ja kõrgepinge mähises 10 tuhat 30 tuhat volti , mis juhitakse süüteküünaltele. Pöörlemissagedus andurid Hall-andur Hall-andur koosneb sir...
Andurite signaalid 1.1 Pöörlemissagedus andurid 1.1.1 Indiksioonandur 1.1.2 Halli andur 1.1.3 Optiline pöörlemissagedusandur 1.1.4 Keeleandur 1.1.5 Magnetotakistiga pöörlemissagedus andur (MRE) 1.2 Rõhk 1.2.1 Rõhulüliti 1.3 Rõhuandur 1.4 Kiirendus või vibratsioon 1.4.1 Detonatsiooniandur 1.5 Õhumõõturid 1.5.1 Labatüüpi õhuvoolumõõtur 1.5.2 Kuumtraat- (kuumkile-) õhumõõtur 1.5.3 Karmani keerisõhumõõtur 1.6 Temperatuur 1.6.1 Termolüliti 1.6.2 Termistor 1.7 Heitgaasi hapnikuandurid 1.7.1 Tsirkooniumandur
Põltsamaa Ametikool Automaatkäigukastid A3 Alvar Müür Kaarlimõisa 2010 1. Ülevaade automaatkäigukastidest 1.1Automaatkäigukastide liigid Automaatkäigukastid muudavad ülekandearvu ehk käike, nagu nimigi ütleb, automaatselt, ilma autojuhi sekkumiseta. Tänapäeva automaatkäigukaste võib jaotada kolme rühma: a) astmeteta, ehk CVT variaatorkastid; b) elektromehaanilise käiguvahetusega käigukastid; c) hüdraulilise käiguvahetuse ja planetaarülekannetega käigukastid. Automaatkäigukastide eeliseks on nende kasutamise mugavus ja suurem sõiduohutus. Autojuht väsib vähem ja ülekandearv muutub koos sõidutingimustega. Hüdrotrafo väldib mootori ja jõuülekande ülekoormamise. Automaatkäigukastide puuduseks võib pidada sidurite läbilibisemisest ja lisandunud elektrienergia vajadusest tin...
OLULISEMATE ANDURITE TÖÖPÕHIMÕTE Mootorielektroonika seadmetest moodustavad andurid ühe suurema osa. Järgnevalt ongi toodud olulisemate andurite tööpõhimõtete kirjeldused. Temperatuuriandurid Temperatuuriandureid kohtab mootori jahutusvedeliku temperatuurianduritena, mootoriõli temperatuurianduritena, silindritele antava õhu temperatuurianduritena jne. Reeglina on need termistortüüpi andurid, mille põhiosaks on pooljuht, mida kutsutakse termistoriks. Selle pooljuhi omaduseks on temperatuuri tõustes vähendada oma elektrilist takistust. Termistor 100000 90000 80000 70000 Résistance en ohms ...
Andurid Soojuslüliti Soojuslülitit kasutatakse jahutusventilaatorite juhtimiseks seadiste ülekuulamise kaitseks (näiteks klaasipühkijate ning soojendusventillatorite mootorites) ning vanemates sissepritsesüsteemides külma mootori küttesegu reguleerimisel. Soojuslüliti töö põhineb soojuspaisemisel. Lülitites kasutatakse kontaktide jutimiseks tavaliselt vahakapsleid ja bimetall. Soojuslüliti enamlevinud reike on kulumisest tingitud liiga suur sisemine pingelang. Pingelang põhjustab signaalhäireid ja kontaktide ülekuumenemist, mis omakorda rikub lüliti lõplikult. Releega või juhtplokiga juhitava soojuslüliti normaalne pingelang on nullilähedane. Seadisega otse ühendatud lüliti lunatid pingelang on kuni 0,2V. Mõõtmist on otstarbekas alustada seadise signaaljuhtme ja aku miinusklemmi vahelt. Juhul kui pingelang on lubatud suurem, tuleb järj-järgult üle kontrollida lüliti kõik ühendused (ära unusta ka maandust). Aeg-soojuslüliti Aeg-soojus...
Põltsamaa Ametikool Piduri veojõu ja juhitavuse korrektorid A3 Alvar Müür Kaarlimõisa 2010 1. ABS- Anti- lock breaking system ( Blokeerumatud pidurid) Juhitavuse halvenemine on tingitud libiseva ratta külgsuunalise hõõrdejõu vähenemisest. Blokeerunud rattal on külgsuunaline hõõrdejõud nullilähedane. ABS-i olulisemad osad on hüdrosõlm, juhtplokk ja autorataste juures asuvad pöörelemissagedusandurid. Juhtplokk võrdleb pöörlemissagedus-anduritelt saadud signaale. Kui ühe ratta pöörlemissagedus väheneb teistest kiiremini (see tähendab blokeerumisohtu), siis hakkab juhtplokk hüdrosõlmes asuvate elektromagnet-klappide abil pidurdusrõhku vähendama. Rõhku vähendadakse seni kuni pöörlemissagedus hakkab uuesti suurenema. Seejärel suurendatakse pidurdusrõhku kuni blokeerumise ohu tekkimiseni, ning kõik kordub. Joonis 1. ABS Skeem 1.2 ABS- i tööpiirkond Juhtplokk jä...
SISUKORD SISSEJUHATUS......................................................................................................................3 1. ANDURID..............................................................................................................................4 1.1. Induktiivandur...............................................................................................................6 1.2. Magnetväljaandur........................................................................................................9 1.3. Optoelektroonilised andurid.....................................................................................13 1.4. Mahtuvusandur..........................................................................................................17 2. MITTEELEKTRILISTE SUURUSTE MÕÕTMINE.......................................................20 2.1. Temperatuur....................................
3.ANDURID JA NENDE MÕÕTEPRINTSIIBID. 3.1.Andurite definitsioon ja liigitus. Anduritele esitatavad nõuded, ideaalkarakteristikud. Andur on automaatsüsteemi osa, mis muundab kontrollitava suuruse mõõtmiseks, edastamiseks, säilitamiseks, registreerimiseks, võimendamiseks või juhitavasse seadmesse suunamiseks sobivasse vormi (optiliseks, mehaaniliseks või elektriliseks signaaliks). Andur koosneb tavaliselt tajurist (esmamuundurist) ja ühest või mitmest vahemuundurist. Mõnel juhul moodustab anduri ainult tajur (nt. termopaar, takistustermomeetri andur). Joonisel 0.2.1 on toodud tüüpilise anduri plokkskeem. Andurid liigitatakse füüsikalise tööpõhimõtte järgi: 1. elektrisuuruste muutusel põhinevad andurid : induktiivandurid, mahtuvusandurid, takistusandurid; 2. optilised, kasutavad elektrimagnetilisi protsesse lainepikkustel üle 10¹² Hz.; 3. mehaanilised, kasutavad tahkete kehade liikumist; 4. hüdraulilised, kasutavad vedelike mehaan...
EESTI MAAÜLIKOOL Tehnikainstituut Mihkel Mandel RIKNENUD AUTOAJU LÄBILÕIGE INFOTEHNOLOOGIA ÕPPEVAHENDIKS Kursusetöö õppeaines "Inseneriinformaatika" TE.0556 Lennunduse side- ja navigatsiooni süsteemide käitamise eriala A3 Üliõpilane: "....." ............... 2011. a ........................Mihkel Mandel Juhendaja: "....." ............ 2011. a ........................lektor Mart Hovi Tartu 2011 ABSTRACT Mandel, M. Cross-section of an automobile's engine control unit as a learning material of infotechnology. Tartu: EMÜ, 2011. XX pages, XX figures, X tables, format A4. In Estonian language. In the current coursew...
Juhtimine ja automaatjuhtimine.Küberneetika? Juhtimiseks nim mingi saada tajureid, mille mahtuvus C on lineaarses sõltuvuses paagis oleva vedeliku masina või protsessi mõjutamist, nii et selle töö annaks soovitatud tulemuse. ruumalast V, s. t. C = c V, kus c on tajuri erimahtuvus Juhtida võib inimene või masin ise. Käsitsijuhtimise korral on kõik Induktiivtajurid?-Induktiivtajuriteks nimetatakse suurt rühma tajureid, kus juhtimisfunksioonid usaldatud inimesele. Automatiseeritud juhtimisel on need sisendsuuruse (deformatsiooni, nihke, jõu, momendi) muutus põhjustab jaotatud inimese ja automaatide vahel. Automaadid täidavad funksioone ,mida elektromagnetilise süsteemi induktiivsuse muutumist. Lugedes suhteliselt inimene pole füüsiliselt võimeline täitma, või pole inimesle vastuvõetavamad. väikese õhupiluga ferromagnetilises süsteemis puistevoo tühiseks, võib mäh...
Automaatkäigukasti hüdraulika Rõhuregulaator koosneb klapist, reguleeritavast vedrust ja ühenduskanalitest. Klapi liigutamisega muudetakse õli pealevoolukanali läbilaskevõimet, millest omakorda sõltub rõhk väljuvas kanalis. Rõhku saab muuta vedru all oleva reguleerkruviga. Rõhuregulaatoreid kasutatakse näiteks pumbast hüdrotrafosse suunduva rõhu (u. 6 bar) ja juhtrõhu reguleerimiseks (u. 3 bar). Erinevusrõhuõhuregulaator Erinevusrõhu regulaatorid hoiavad siseneva ja väljuva rõhu vahe muutumatuna (n. 1 bar). Ehituselt ja tööpõhimõttelt sarnaneb ta rõhuregulaatoriga. Põhierinevus on klapi juhtimises. Klapi ühele poolele mõjub regulaatorisse sisenev rõhk ja teisele poolele väljuv rõhk koos vedruga. Erinevusrõhu regulaatoreid võidakse kasutada ka näiteks kahesuunalise juhtimisega regulaatorites. Töörõhu reguleerimine Käigukasti sidureid ja pidureid kokku suruvat rõhku nimetatakse töörõhuks ja tähistatakse lühendiga PL. Klappi...
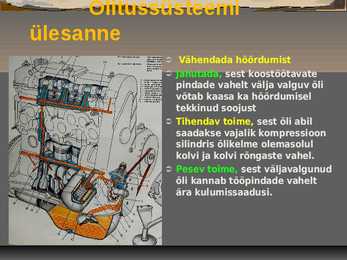
Õlitussüsteemi ülesanne Vähendada hõõrdumist Jahutada, sest koostöötavate pindade vahelt välja valguv õli võtab kaasa ka hõõrdumisel tekkinud soojust Tihendav toime, sest õli abil saadakse vajalik kompressioon silindris õlikelme olemasolul kolvi ja kolvi rõngaste vahel. Pesev toime, sest väljavalgunud õli kannab tööpindade vahelt ära kulumissaadusi. Õli juhitakse mootoris detailideni kolmel viisil Õlipumba tekitatud surve all Paiskamise teel Valgumisega Surve all õlitatakse Väntvõlli rohkem koormatuid raamlaagrid, kepsu detaile alumine pea, nukkvõl...
2. Mittelineaarsed alalisvooluahelad 2.1 Mittelineaarne takisti Eespool, jaotises 1.4 ja 1.5 takistust ja takisteid vaadeldes eeldati, et takistit läbiv vool on võrdeline pingega ehk takistus on püsiv suurus, mille väärtus lineaarselt muutub vaid sõltuvalt temperatuurist. Niisuguste omadustega takistit nimetatakse lineaartakistiks. Elektrotehnikas ja elektroonikas on kasutusel ka mitmesugused mittelineaartakistid. Mittelineaar- takisti takistus sõltub välismõjuritest · temperatuurist (termotakisti: termistor ja posistor) · pingest (varistor) · valguskiirgusest (fototakisti) · magnetväljatugevusest (Halli andur) · mehaanilisest deformatsioonist (tensotakisti) Mittelineaartakistit iseloomustab tema pinge-voolu tunnusjoon. Pinge-voolu tunnusjooneks nimetatakse graafikut, mis iseloomustab voolu sõltuvust pingest I = f (U ) Lineaartakisti pinge-voolu tunnusjoon on sirge (a), mis läbib koordinaatide algpunkti (origo). Võr...
Kordamisküsimused 1. Mis on Ohmi seadus? U=R*I 2. Mis on pingejagur? Etteantud parameetritega pingejaguri arvutamine. Pingejagur – alalis- või vahelduvpinget osadeks jagav elektriseade. 3. Elektriahela võimsus. U2 2 P=U∗I = =I ∗R R 4. Edissoni efekti olemus? 5. Elektronlambid (diood, triood, tetrood …) ja nende tööpõhimõte? diood ‒ kahe elektroodiga (katood, anood); triood ‒ kolme elektroodiga (katood, võre, anood); pentood ‒ viie elektroodiga (katood, tüürvõre, varivõre, sulgvõre, anood). Tetrood – nelja kanaliga Dioodi tööpõhimõte Töötamisel lastakse vool läbi nikroomist hõõgniidi, mis kuumutab katoodi 800...1000 °C kraadini. Kuum katood eraldab elektrone vaakumisse, protsess, mida nimetatakse termoemissiooniks. Katood on kaetud leelismuldmetalli (nt.baarium või strontsium) oksiidiga, millest elektronid väljuvad suhteliselt kerg...
Autod-traktorid Kordamisküsimused - vastused TA ja EG II üliõpilastele 1. Autode ja traktorite arengust (1) lk. 3. 4000. aastat e.k. kivist ratta leiutamine, et veeretada seda. 2000. aastat e.k. vankri leiutamine. Umbes 1500. aastal Leonardo Da vinci Liikuvate masinate projekteerimine (eskiisprojektid). 1765. aastal James Watt ehitab aurumasina. N. J Cugnot ehitab kasutuskõlbliku aurusõiduki kandevõimega 4,5 t ja liikumiskiirusega 4km/h. 1885.-1886. aastal C. Benz ja G. Daimler sisepõlemismootoritega autode ehitamine. 19. sajandi lõpus autotööstus prantsusmaal, saksamaal, ameerikas ja suurbritannias. 20. sajandi alguses Hendri Ford rajas autode konveiertootmise. 1924. diiselmootori areng, 1936. aastal diiselsõiduauto, 1950. aastal gaasturbiinauto, 1959. aastal wankelmootoriga auto. Auto arenguperioodid: 1700 1860 jõuallikaks aurumasi...
Referaat Harjadeta elektrimootor Õppeaines: Elektrotehnika Transporditeaduskond Sisukord 1. Elektrimootor 1.1. Asünkroonmootor 1.2. Asünkroonmootori rootor 1.3. Sünkroonmootor 2. Püsimagnetiga sünkroonmootor 2.1. Suurevõimsuselised sünkroonmootorid 2.2. Väiksevõimsuselised sünkroonmootorid 3. Harjadeta alalisvoolumootorid 4. Samm-mootorite tööpõhimõte 4.1. Unipolaarne mootor 4.2. Bipolaarne mootor 4.3 .Lainetalitus 4.4 .Samm-mootori koormamine 5. Kasutusalad 1.Elektrimootor Elektrimootor on seade, mida kasutatakse elektrienergia muundamiseks mehaaniliseks tööks.Enamik elektrimootoreid töötab tänu elektromagnetisminähtusele. Kuid on ka mootoreid millede töö baseerub teistel elektromehaanilistel nähtustel nagu näiteks piesoelektrilisel efektil ja elektrostaatilistel jõududel. Elektromagnetisminähtusel põhinevate mootorite tööpõhimõtteks on pöörleva magnetvälj...
1. Elektrilaeng ja elektriväli. Potentsiaal ja pinge. Elektrilaeng e. laeng on füüsikaline suurus, mis näitab kui tugevasti laetud kehad osalevad elektrilises vastastikmõjus. Tähis q, ühik 1C (kulon) Laengud jaotatakse kokkuleppeliselt positiivseteks (+) ja negatiivseteks (). Samaliigilise laenguga kehad tõukuvad ja eriliigilise laenguga kehad tõmbuvad. Elektrilaengu väärtus on positiivse laengu puhul positiivne arv ja negatiivse laengu puhul negatiivne arv. Neutraalsele osakesele või kehale võidakse omistada elektrilaengu väärtus 0. Elektriväli on elektrilaengu poolt tekitatud ruumis leviv pidev väli, mis mõjutab teisi ruumis paiknevaid elektrilaenguid. Elektrivälja potentsiaal on füüsikaline suurus, mis võrdub mingisse elektrostaatilise välja punkti asetatud elektrilaengu potentsiaalse energia ja laengu suuruse suhtega. Kui me tähistame potentsiaali tähega , siis kus Wp on laengu potentsiaalne energia ja q on laengu s...
1. Suurus - on nähtuse, keha või aine oluline omadus, mida saab kvaliteetselt eristada ja kvantitatiivselt määrata. Esitatud mõiste suurus võib tähendada suurust üldiselt, nagu pikkus, mass, aeg, temp, takistus, ainehulga kontsentratsioon jne. või mingit konkreetset suurust, nagu teatud varda pikkus, antud traadi elektriline takistus, etanooli ainehulga kontsentratsioon mingis veinis. Mõiste suurus kasutatakse uurivate materjaalsete süsteemide, objektide, nähtuste, protsesside, jne. kirjeldamisel teaduse kõikides valdkondades (füüsika, keemia, jt,) Mõistet suurus ei ole õige rakendada vaadeldava nähtuse, keha või aine omaduse puht kogulises (kvalitatiivse) külje väljendamiseks, nagu mass, suurus, pikkuse suurus, radionukliidi aktiivsuse suurus, pinge suurus, jne., sest kõnealused nähtuse, keha või aine omaduse - mass, pikkus, jne. on ise suurused. Sellistel juhtudel tuleb kasutada mõisteid suuruse väärtust (massi väärtus, jne.) 2. Suuru...
MTM0010 - Metroloogia ja mõõtetehnika (õppejõud E. Kulderknup) KORDAMISKÜSIMUSED ja nende vastused õppejõu materjalide põhjal TEOORIA: 1. METROLOOGIA MÕISTE Teadus mõõtmisest ja selle rakendamine Metroloogia hõlmab mõõtmise kõiki teoreetilisi ja praktilisi aspekte, ükskõik milline ei oleks ka mõõtemääramatus ja rakendusvaldkond: - mõõtühikute määratlemine; - mõõtühikute realisatsioon ja esitamine, etalonid; - mõõtühiku jälgitavusahela kindlustamine (töömõõtevahend kuni mõõtühiku realisatsioonini); Võib eristada kolme erinevat taset sõltuvalt täpsustasemest ja rakendamisest. 1. Teaduslik metroloogia tegeleb mõõteetalonide arendamise ja organiseerimisega ning nende säilitamisega kõrgtasemel. Fundamental metrology ei ole otseselt defineeritud, kuid tegeleb metroloogia alustega täpsuse kõrgtasemel, seega teadusliku metroloogia ülemine tase. 2. Tööstusmetroloogia tegeleb mõõtevahenditega ja katsetuste, kalibreerimistega ning mõõt...
Tallinna Polütehnikum Energeetika õppesuund Rein Kask ELEKTRIAJAMITE JUHTIMINE Õppevahend TPT energeetika õppesuuna õpilastele Tallinn, 2007 Saateks Erialaainete õpikute ja muude õppevahendite krooniline puudus on juba palju aastaid raskendanud kutsehariduskoolide õpilastel omandada erialaseid teadmisi. Käesolev kirjatöö püüab mingilgi määral leevendada seda olukorda Tallinna Polütehnikumi energeetika õppesuuna õpilastele sellise õppeaine kui ,,Elektriajamite juhtimine" õppimisel. Elektriajamid on üheks põhiliseks elektritarvitite liigiks ja neid kasutatakse laialdaselt kõikides eluvaldkondades. On selge, et tulevased elektriala spetsialistid peavad neid hästi tundma ja oskama neid ka juhtida. Elektriajamite juhtimine ongi valdkonnaks, mida käsitleb käesolev õppevahend. Selle koostamisel on autor lähtunud põhimõttest selgitada probleeme nii põhjalikult kui vajalik ja nii napilt kui võimalik ...
Eesti Mereakadeemia Informaatika ja arvutitehnika õppetool INFORMAATIKA - I Arvutite riistvara (loengukonspekt) Koostas: J.Pääsuke Tallinn 2001-2004.a. Sisukord 1. Sissejuhatus............................................................................................................................4 1.1. Arvutite (personaalarvutite) ajaloost...............................................................................5 1.2. Mõningaid põhimõisteid..................................................................................................6 1.3. Arvuti väljast ja seest vaadatuna.....................................................................................7 2. Arvutite protsessorid.....................................................................
1. Laeva arhitektuursed tüübid. Vööri ja ahtri kuju, tekiehitiste ja masinaruumi paiknemine. · Arhitektuuri tüübid on: ahtri ja vööri kuju, tekimajakate asukoht, kerede arv (katamaraan, trimaraan) · Vööri kuju Plumb bow PÜSTVÖÖR Raked bow KALDAVÖÖR (annab laevale voolujoonelisuse, vähendab vee sattumist tekile, soodustab lainele tõusmist) Modified raked bow LÕIGATUD VÖÖR ((jääoludes pooljäämurdevöör) vee peal peaaegu vertikaalne, vee all 45°-50° kaldu, hea sõiduks purustatud jääs. Selline vöör sobib hästi jäämurdja ahtriväljalõikeks. Spoon bow LUSIKVÖÖR Clipper bow KLIPPERVÖÖR PULBIDEGA E PIRNIGA (esineb kiirekäigulistel laevadel, annab eriti edasipürgiva välismulje, kaitseb tekki suure kiruse juures tekkivate pritsmete eest) Icebraker bow JÄÄMURDJA VÖÖR (veealune osa on 25°-30° kaldu, kasutatakse jäämurdj...
3 ELEKTRIAJAMITE ELEKTROONSED SÜSTEEMID 4 Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene Toimetanud Evi-Õie Pless Kaane kujundanud Ann Gornischeff Käesoleva raamatu koostamist ja kirjastamist on toetanud SA Innove Tallinna Tehnikaülikool Elektriajamite ja jõuelektroonika instituut Ehitajate tee 5, Tallinn 19086 Telefon 620 3700 Faks 620 3701 http://www.ene.ttu.ee/elektriajamid/ Autoriõigus: Valery Vodovozov, Dmitri Vinnikov, Raik Jansikene TTÜ elektriajamite ja jõuelektroonika instituut, 2008 ISBN ............................ Kirjastaja: TTÜ elektriajamite ja jõuelektroonika instituut 3 Sisukord Tähised............................................................................................................................
EESTI MAAÜLIKOOL VETERINAARMEDITSIINI JA LOOMAKASVATUSE INSTITUUT LOOMAGENEETIKA JA TÕUARETUSE OSAKOND LOENGUKONSPEKT VEISEKASVATUSE ALUSED Koostas: dots. Einar Orgmets Tartu 2008 VEISEKASVATUS SISUKORD SISUKORD..................................................................................................................................2 1. VEISTE KODUSTAMINE JA ULUKEELLASED.....................................................................4 1.1. VEISTE KODUSTAMINE JA PÕLVNEMINE. .............................................................................................................. 4 1.2. VEISTE ULUKEELLASED .......................................................
ELEKTROTEHNIKA ALUSED Õppevahend eesti kutsekoolides mehhatroonikat õppijaile Koostanud Rain Lahtmets Tallinn 2001 Saateks Raske on välja tulla uue elektrotehnika aluste raamatuga, eriti kui see on mõeldud õppevahendiks neile, kes on kutsekoolis valinud erialaks mehhatroonika. Mehhatroonika hõlmab kõike, mis on vajalik tööstuslikuks tehnoloogiliseks protsessiks, ning haarab endasse tööpingi, jõumasinad ja juhtimisseadmed. Toote valmistamiseks kasutatakse tööpingis elektri-, pneumo- kui ka hüdroajameid, protsessi juhitakse arvuti ning elektri-, pneumo- ja/või hüdroseadmetega. Mida peab tulevane mehhatroonik teadma elektrotehnikast? Mille poolest peab tema elektrotehnika- raamat erinema neist paljudest, mis eesti keeles on XX sajandil ilmunud? On ju põhitõed ikka samad. Käesolev raamat on üks võimalikest nägemustest vastuseks eelmistele küsimustele. Selle koostam...
ARSENI PALU EHITUS, EKSPLUATATSIOON SÕIDUTEHNIKA «Valgus» · Tallinn 1976 6L2 P10 Retsenseerinud Uve Soodla Kääne kujundanud Bella G r o d i n s k i Raamatu esimeses osas kirjeldatakse meil enamlevi- nud mootorrataste, motorollerite ja mopeedide ehi- Eessõna tust ning töötamist. Teises osas käsitletakse kõigi nimetatud sõidukite hooldamist ja rikete otsimist- Mootorrattaid (motorollereid ja mopeede) käsutatakse kõrvaldamist Kolmandas osas antakse nõu õige ja peamiselt isiklike sõidukitena. Nad säästavad aega igapäe- ohutu sõidutehnika õppimiseks. vastel tarbekäikudel, võimaldavad huvitavalt veeta nädala- Raamat on mõeldud kõigile, kes ...