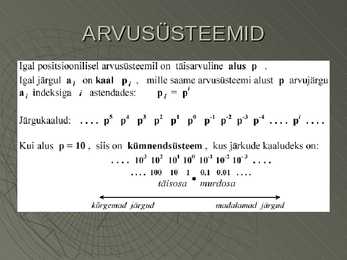
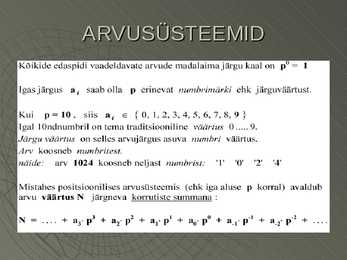
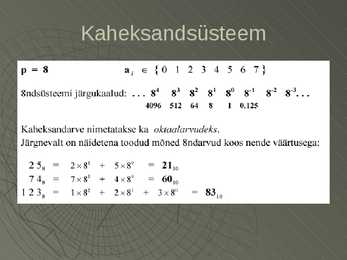
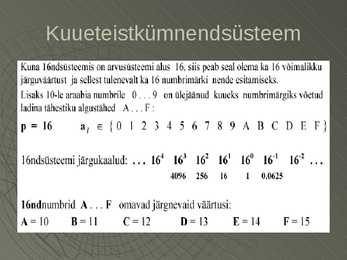
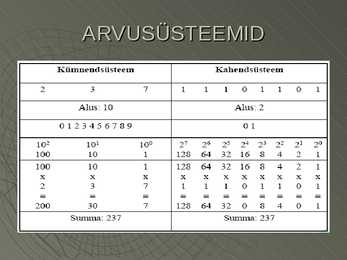
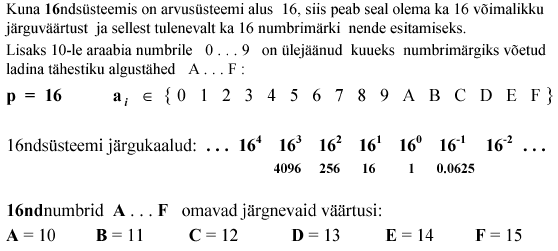
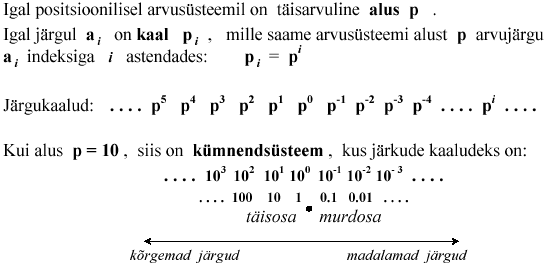
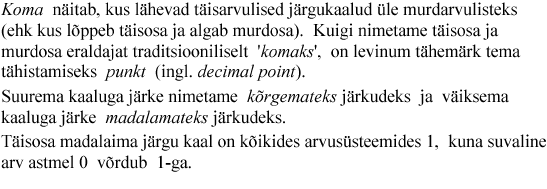
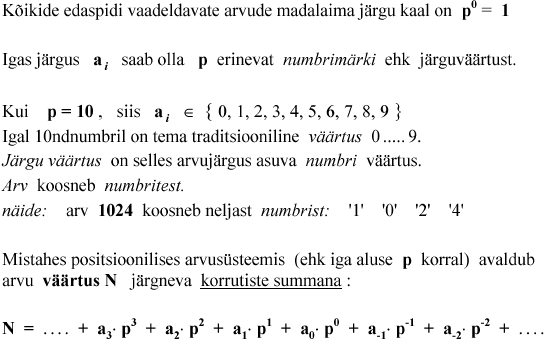
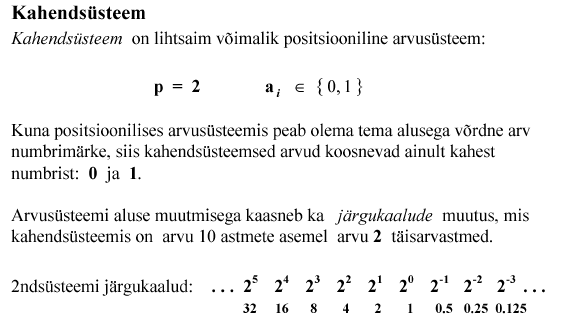
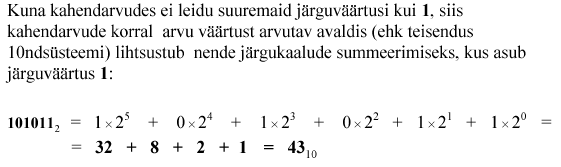
süsteemideks. Viimaste hulka kuulub näiteks rooma numbrite süsteem. Positsiooniliseks süsteemiks nim. arvusüsteemi, kus ühel ja samal numbril on erinev väärtus, sõltuvalt numbri asukohast arvujadas. Neid süsteeme iseloomustab arvude esitamise selgus ning aritmeetiliste operatsioonide lihtsus. Positsiooniliste süsteemide hulka kuuluvad nii kümnend-, kahend-, kaheksand- kui ka kuueteistkümnendsüsteem. Arvuti opereerib eranditult ainult kahendsüsteemis. Suhtlemiseks kasutajaga kasutatakse harilikult 10-nd- ja 16-ndsüsteemi. Programmeerijad kasutavad 8-nd-, 2- nd ja teisigi süsteeme. Näiteks arvu kümnendsüsteemis saab väljendada 214252=2·105+1·104+4·103+2·102+5·101+2·100 Parempoolseima arvu kohakaalu (100) astmeks on 0 mitte 1, sellest järgmise vasemale kohakaalu (101) astmeks on 1 mitte 2 jne. NB! 100=1; 20=1; 80=1; 160=1.
......................................................... 24 Peidikmälu, vahemälu (Cache) ................................................................................................... 25 Arvuti mälu ............................................................................................................................................. 30 Mälu hierarhia arvutis (Memory hierarchy) ................................................................................ 32 Arvuti mälu klassifikatsioon (Computer memory classification) ............................................... 33 Muutmälu (RAM) ....................................................................................................................... 33 Staatiline pooljuht suvapöördusmälu (Static RAM) .................................................................... 34 Dünaamiline pooljuht suvapöördusmälu (Dynamic RAM) ......................................................
(Branch Prediction)............................................................24 Peidikmälu, vahemälu (Cache)..................................................................................................25 Arvuti mälu ....................................................................................................................................30 Mälu hierarhia arvutis (Memory hierarchy).............................................................................. 32 Arvuti mälu klassifikatsioon (Computer memory classification)..............................................33 Muutmälu (RAM)......................................................................................................................33 Staatiline pooljuht suvapöördusmälu (Static RAM)..................................................................34 Dünaamiline pooljuht suvapöördusmälu (Dynamic RAM).......................................................36
1.6.1. Diskreetsete automaatide olemus 48 1.6.2. Algoritmide aparatuurne realiseerimine 51 1.6.3. Programm- ja mikroprogrammjuhtimine 57 1.6.4. Algoritmide programmiline realiseerimine 60 4 2. MIKROPROTSESSORID 61 2.1. Mikroprotsessorite ja arvutite ehitus 61 2.1.1. Põhimõisted 61 2.1.2. Arvuti põhiplokkid ja siinid 63 2.1.3. Töötsüklid 65 2.2. Mikroprotsessori tööpõhimõte 67 2.2.1. Protsessori ehitus 67 2.2.2. Registrid ja nende otstarve 68 2.2.3. Ajadiagrammid 71 2.2.4
Laiale lugejaskonnale sobivaid eestikeelseid raamatuid on personaalarvutite riistvara kohta ilmunud võrdlemisi vähe. Aastal 2006 on küll välja antud R. Hooli tõlkes Mark Chambers'i ,,Arvuti ehitamine võhikutele"; käesolevas brosüüris on vähemalt pealtnäha rõhuasetus mit- te arvutimontaazil, vaid mitmesuguste komponentide omaduste ja rakendusalade tundma- õppimisel. Niisiis ei paku see õppevahend lihtsaid vastuseid küsimusele ,,millist arvutit mul vaja on?" ega ka ,,mu arvuti on katki, mida ma peaksin tegema?", ent siin leiduva materja- li omandanud ja praktiliselt läbi proovinud õppija oskab arvatavasti neile küsimustele juba iseenesest vastata. Esimene peatükk sisaldab ,,füüsilise" riistvara materjali arvutite talitluspõhimõtted, arvu- tikorpuse sees olevad ning korpusega ühenduvad seadmed ja sülearvutite eripärad. Teises peatükis on tähelepanu arvuti komplekteerimisel garantiitingimused, arvutimontaazi reeg-
Lisaks 57 käsule kuuluvad MMX juurde ka 8 64- bitist registrit (MM0-MM7) ja neli uut andmetüüpi. Kuna registrid on 64-bitised, saab ühe käsuga töödelda kahte kaheksast kaheksabitisest sõnast koosnevat vektorit. MMX käsud kasutavad ujukomaregistreid, kuid registrid nimetatakse ümber enne esimese MMX-käsu täitmist. Ka peale viimase MMX-käsu täitmist tuleb sooritada EMMX-käsk, mis lubab neid registreid endiselt kasutada. MMX tarkvara on küll olemas, kuid väga suurt mõju ta arvuti jõudlusele ei avalda. Selles suhtes on MMX suhteliselt ebaõnnestunud. Tavakasutaja poolelt on riistvaras Pentiumi puhul ainuke erinevus selles, et Pentium MMX kasutab kahte pinget (sisemine ja välimine). 3Dnow! AMD poolt välja töötatud analoog MMX-le. Ka see lisa sisaldab uusi käske (algselt 24, tavakasutajale 21), mis kiirendavad eelkõige graafikat. Erinevalt MMX-st on sellel ka märgatav mõju arvuti töökiirusele. (nt Quake 2 jõudluse kasv umbes 1,5 korda)
märgi osa sellel parem klõps ning “Comment”). Küsimuste järel on vastamise koht. Vastamisel lisage kindlasti küsimus ja järjekorra number! TUBLID OLETE! :) Kes ütles? Palume autorit! :-) Kuidas kasutada Google Doc-si, õppevideo: http://www.youtube.com/watch?v=lMqdex3KDQM Rene 1-6 1. Käsu täitmine protsessoris (käsuloendur, käsuregister, käsu dekooder, operatsioon automaat ja juhtautomaat). 2. Arvuti mälu hierarhia. 3. Analoog info, ADC, DAC ja helikaart. 4. Pooljuhtmälud. 5. Konveier protsessoris ja mälus. 6. Virtuaal mälu. TAUSTAVÄRVIGA KÜSIMUSED ON VASTAMATA!!! PIIA 7-12 8. Andmevahetus mikroarvutis (erinevad siinid ja nende osa andmevahetuses, AB, DB, CB). 7. Erinevad siinid ja nende osa andmevahetuses (AB, DB, CB). 9. Optilised mäluseadmed. 10
märgi osa sellel parem klõps ning “Comment”). ● Küsimuste järel on vastamise koht. Vastamisel lisage kindlasti küsimus ja järjekorra number! TUBLID OLETE! :) Kes ütles? Palume autorit! :-) Kuidas kasutada Google Doc-si, õppevideo: http://www.youtube.com/watch?v=lMqdex3KDQM Rene 1-6 1. Käsu täitmine protsessoris (käsuloendur, käsuregister, käsu dekooder, operatsioon automaat ja juhtautomaat). 2. Arvuti mälu hierarhia. 3. Analoog info, ADC, DAC ja helikaart. 4. Pooljuhtmälud. 5. Konveier protsessoris ja mälus. 6. Virtuaal mälu. TAUSTAVÄRVIGA KÜSIMUSED ON VASTAMATA!!! PIIA 7-12 8. Andmevahetus mikroarvutis (erinevad siinid ja nende osa andmevahetuses, AB, DB, CB). 7. Erinevad siinid ja nende osa andmevahetuses (AB, DB, CB). 9. Optilised mäluseadmed. 10





















Kõik kommentaarid