Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Matriklinumber: Rühm: MAHB41 Kuupäev: 08.05.2012 Õppejõud: Merle Randrüüt Ülesanne 1 r = OA = 250mm = AC = 900mm ja a) Punkti A koordinaadid , sõltuvus funktsiooni pöördenurgast b) Määrata punkti C koordinaadid xC , yC funktsioonina pöördenurgast c) Matlab-i kood r = 0.25; l = 0.9; xB = 0.4 yB = 0.3; phi = linspace (0, 2*pi, 361); xC = zeros(1, 361); yC = zeros(1, 361); %Tsükkel for k=1:361 gamma = atan((xBr*cos(phi(k)))/(yBr*sin(phi(k)))); xA = r*cos(phi(k)); yA = r*sin(phi(k)); xC(k) = xA+l*sin(gamma); yC(k) = yA+l*cos(gamma); end figure(1) hold off plot(xC, yC, 'linewidth', 2) title('Punkti C trajektoor') xlabel('x [m]') ylabel('y [m]') Ülesanne 2 a) Vedr
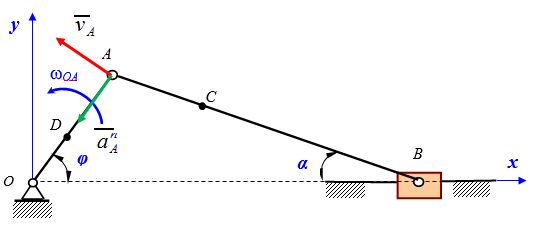
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 26. märts 2012 Õppejõud: Merle Randrüüt Leo Teder Antud andmed: B r = 500 mm a = 700 mm h =1600 mm = 60 min-1 1) Määrata vedava lüli punkti A kordinaadid funktsioonina nurgast . A Ax Ay r Ax = r * sin Ay = r * cos Punkit A kordinaadid: A{r*sin ; r*cos }
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 15. mai 2012 Õppejõud: Merle Randrüüt Leo Teder Ülesanne 1 r = 250 mm l = 900 mm xB = 400 mm yB = 300 mm a) Määrata punkti A koordinaadid xA , yA funktsioonina pöördenurgast . xA = r * cos yA = r * sin b) Määrata punkti C koordinaadid xC , yC funktsioonina pöördenurgast . y B-rsin =arctan x B-rcos x C =rcos +lcos y C =rsin +lsin c) Kirjutada MATLAB-i või Octave'i pro- gramm, mis esitab punkti C liikumise graafiku (joon, mida mööda punkt C l
Tallinna Tehnikaülikool Mehhatroonikainstituut Jüri Kirs, Kalju Kenk Kodutöö D-2 D'Alembert'i printsiip Tallinn 2007 Kodutöö D-2 D'Alembert'i printsiip Leida mehaanikalise süsteemi sidemereaktsioonid kasutades d'Alembert'i printsiipi ja kinetostaatika meetodit. Kõik vajalikud arvulised andmed on toodud vastava variandi juures. Seda, millised sidemereaktsioonid süsteemi antud asendis tuleb leida, on samuti täpsustatud iga variandi juures. Variantide järel on lahendatud ka rida näiteülesandeid koos põhjalike seletustega. Näiteülesandeid d'Alembert'i printsiibi kohta võib lugeda ka E. Topnik' u õpikus ,,Insenerimehaanika ülesannetest IV. Analüütiline mehaanika", Tallinn 1999, näited 14-17, leheküljed 39-49. Kõikides variantides xy-tasapind on horisontaalne, xz- ja yz-tasapinnad aga on vertikaalsed. Andmetes toodud suurused 0 ja 0 on vastavalt pöördenurga ja
Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks. 1. Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised 2. Superpositsiooniaksioom. Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha mistahes teise punkti. 3. Jõurööpküliku aksioom. . Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha seisundit muutmata asendada resultandiga, mis võrdub nende geomeetrilise summaga. Aksioom kehtib ka deformeeruva keha juhul. 4. Mõju ja vastumõju aksioom (Newtoni III seadus ). Kaks keha mõjutavad teineteist võrdvastupidiste jõududega, millel on ühine mõjusirge. 5. Jäigastamise aksioom. . Deformeeruva keha tasakaal ei muutu, kui lugeda
KESKKOOLI MATEMAATIKA RAUDVARA 1. osa Andres Haavasalu dikteeritud konspekti järgi koostanud Viljar Veidenberg. 2003. aasta 1 Sisukord Sisukord........................................................................................................................................2 Arvuhulgad............................................................................................................................... 5 Naturaalarvude hulk N..........................................................................................................5 Negatiivsete täisarvude hulk z ...........................................................................................5 Täisarvude hulk Z.................................................................................................................5 Murdarvu
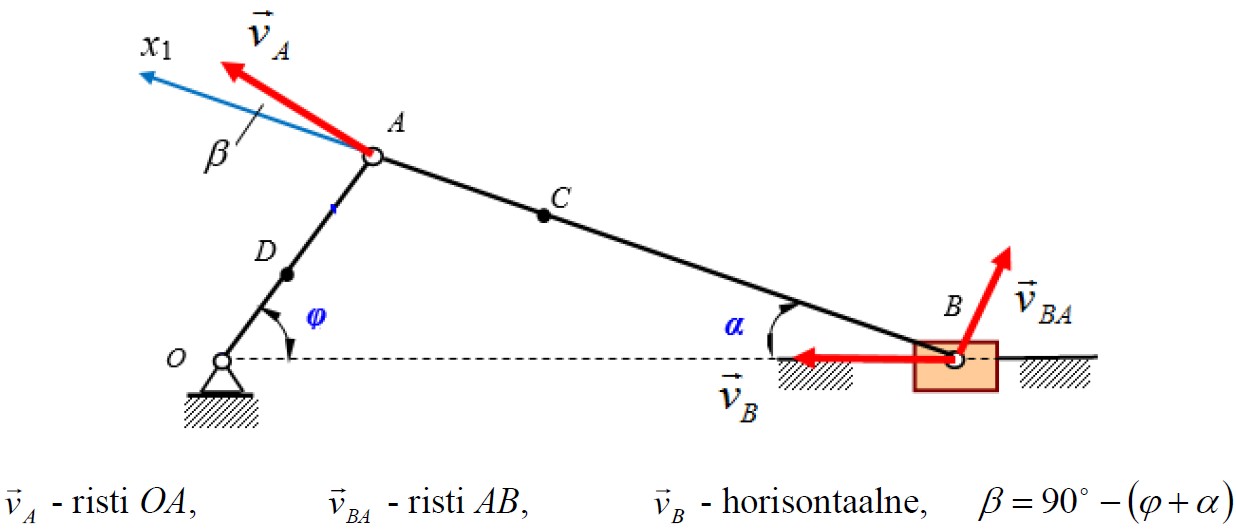
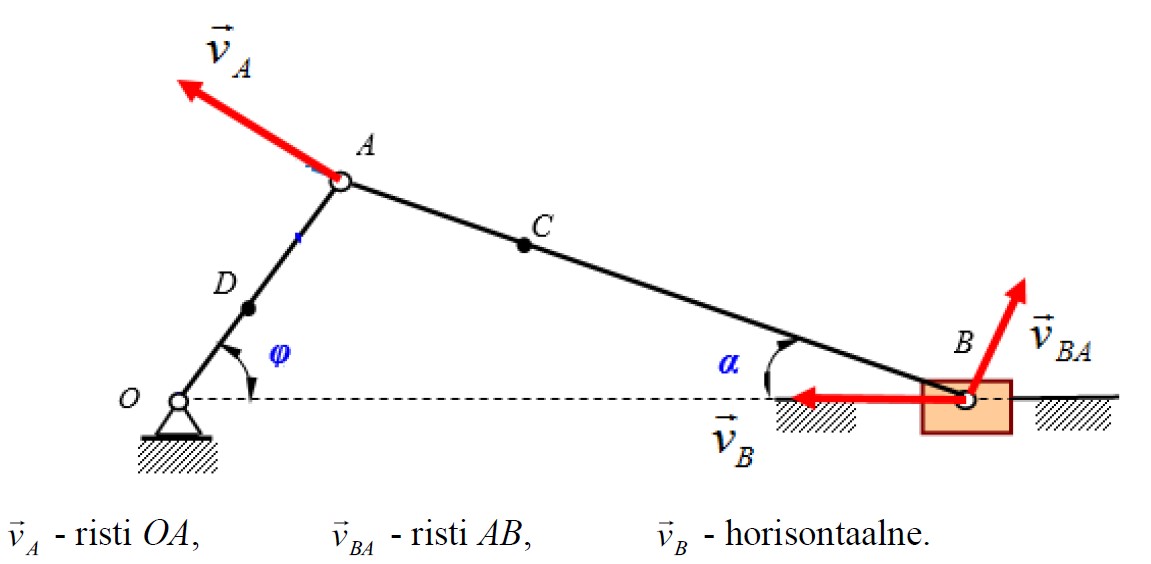
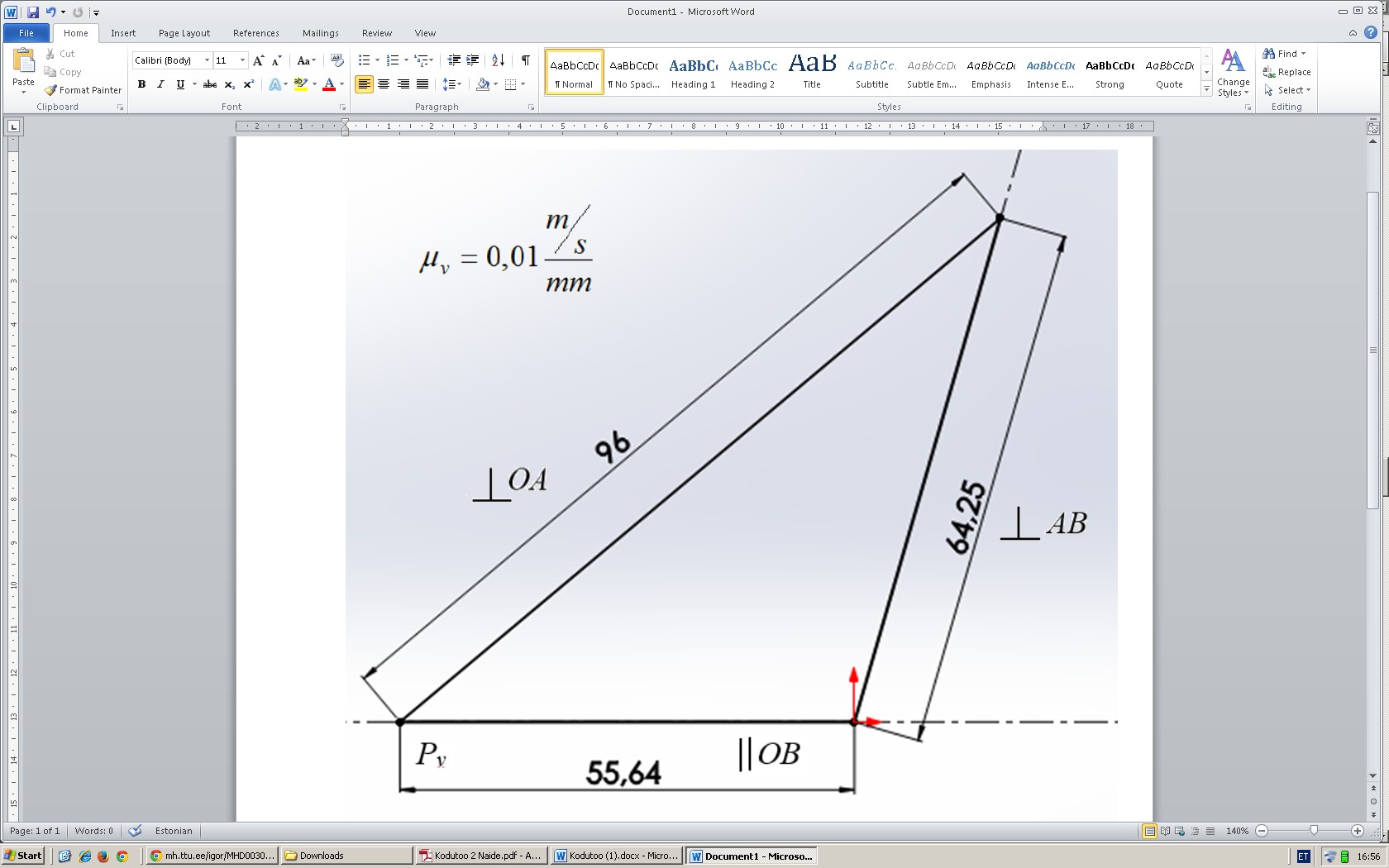
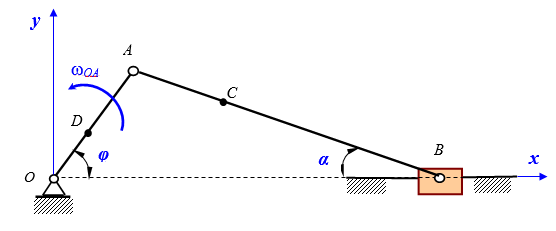
1.1. Kinemaatilised paarid, lülid, ahelad 1.1.1. Kinemaatilised paarid 1.1.2. Vabadusastmed ja seondid 1.1.3. Lülid, kinemaatilised ahelad 1.2. Kinemaatilise ahela vabadusaste. Liigseondid. Liigliikuvused 1.2.1. Vabadusaste 1.2.2. Liigseondid. Liigliikuvused. 1.3. Mehhanismide struktuuri sünteesimine 1.3.1. Struktuurigrupid 1.3.2. Kõrgpaaride arvestamine 1.3.3. Kinemaatiline skeem. Struktuuriskeem 2. ptk. MEHHANISMIDE KINEMAATILINE ANALÜÜS 2.1. Eesmärk. Algmõisted 2.2. Mehhanismide kinemaatika analüütilised meetodid 2.3. Tasandilise mehhanismi kinemaatika arvutusgraafilised meetodid 2.3.1. Siirete leidmine 2.3.2. Kiirusplaan. Homoteetse kolmnurga reegel 2.3.3. Düaadmehhanismide kiirusplaanid 2.3.4. Düaadmehhanismide kiirendusplaanid 2.3.5. Kinemaatilised diagrammid 3. ptk
MTMM.00.340 Kõrgem matemaatika 1 2016 KÄRBITUD loengukonspekt Marek Kolk ii Sisukord 0 Tähistused. Reaalarvud 1 0.1 Tähistused . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 0.2 Kreeka tähestik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0.3 Reaalarvud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 0.4 Summa sümbol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1 Maatriksid ja determinandid 7 1.1 Maatriksi mõiste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2 Tehted maatriksitega . . . . . . . . . . . . . . . . . . .





























Kõik kommentaarid