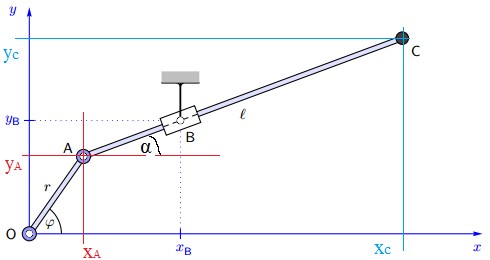
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 2 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 15. mai 2012 Õppejõud: Merle Randrüüt Leo Teder Ülesanne 1 r = 250 mm l = 900 mm xB = 400 mm yB = 300 mm a) Määrata punkti A koordinaadid xA , yA funktsioonina pöördenurgast . xA = r * cos yA = r * sin b) Määrata punkti C koordinaadid xC , yC
TALLINNA TEHNIKAÜLIKOOL MEHHATROONIKAINSTITUUT MHD0030 MASINAMEHAANIKA KODUTÖÖ NR. 2 Väntmehhanismi kinemaatiline analüüs ÜLIÕPILANE: KOOD: Töö esitatud: 18.03.2014 Arvestatud: Parandada: TALLINN 2015 Lähteandmed Mehhanismi vänt OA pöörleb konstantse nurkkiirusega OA 2,4 rad/s. Pikkused: OA 40 cm, AB 110 cm, AC = 45 cm (punkt C – kepsu massikese). Leida:
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Ove Hillep Matriklinumber: 072974 Rühm: MATB Kuupäev: 26. märts 2012 Õppejõud: Merle Randrüüt Leo Teder Antud andmed: B r = 500 mm a = 700 mm h =1600 mm = 60 min-1 1) Määrata vedava lüli punkti A kordinaadid funktsioonina nurgast .
Tallinna Tehnikaülikool Mehaanikateaduskond Mehhatroonikainstituut Masinamehaanika õppetool Masinamehaanika Kodutöö nr. 1 Üliõpilane: Matriklinumber: Rühm: MAHB41 Kuupäev: 20.03.2012 Õppejõud: Merle Randrüüt Ülesande püstitus Risthöövelpink (ingl. k. shaping machine) on ehitatud nii, et liuguritera hoidikusse kinnitatud Hööveltera saab liikuda edasi-tagasi: lõikefaasis aeglaselt, tagasiliikumisfaasis kiiresti. Liugur pannakse liikuma kulissmehhanismi abil. Järgnevalt on esitatud risthöövelpingi kinemaatikaskeem:
Kui jõusüsteemiga on ekvivalentne üksainus jõud, siis seda jõudu nimetatakse süsteemi resultandiks. 1. Tasakaaluaksioom. Kaks absoluutselt jäigale kehale rakendatud jõudu on tasakaalus siis ja ainult siis, kui nad on samal sirgel ja võrdvastupidised 2. Superpositsiooniaksioom. Tasakaalus olevate jõusüsteemide lisamine või eemaldamine ei mõjuta jäiga keha tasakaalu või liikumist. Järeldus: jäiga keha tasakaal ei muutu, kui kanda jõu rakenduspunkt piki mõjusirget üle keha mistahes teise punkti. 3. Jõurööpküliku aksioom. . Kui keha mingis punktis on rakendatud kaks jõudu, siis neid saab keha seisundit muutmata asendada resultandiga, mis võrdub nende geomeetrilise summaga. Aksioom kehtib ka deformeeruva keha juhul. 4. Mõju ja vastumõju aksioom (Newtoni III seadus ). Kaks keha mõjutavad teineteist võrdvastupidiste jõududega, millel on ühine mõjusirge. 5. Jäigastamise aksioom. . Deformeeruva keha tasakaal ei muutu, kui lugeda
1. Maa kuju ja suurus. Maad loetakse üldiselt kerakujuliseks (R~640km, Re~6387,5km) Kõige täpsemini vastab maa tegelikule kujule geoid (kujuteldav keha, mille pind on kõikjal risti loodjoontega ning ühtib merede ja ookeanide häirimata veepinnaga). Kuna geoidi kuju ei ole võimalik mat. valemitega kirjeldada, siis kasut. täpsete geodeetiliste arvutuste jaoks geoidi mat. mudelit pöördellipsoidi · a=6378,137 km pikem pooltelg · b=6356,7573141 km lühem pooltelg · f=1/298,257222101 lapikus Kaasajal kasut. uurimistöödes GPS mõõtmisi (GPS mõõtmiste aluseks on geotsentrilised koordinaadid). 2. Geograafilised koordinaadid. Geograafilisteks koordinaatideks on geograafiline laius ja pikkus. Geograafilised koordinaadid määratakse kas astronoomiliste vaatlustega või arvutatakse ellipsoidi pinnale redutseeritud geodeetiliste mõõtmiste andmetest. Kaasajal määratakse GPS mõ
1. Maa kuju ja suurus. Maad loetakse üldiselt kerakujuliseks (R~640km, Re~6387,5km) Kõige täpsemini vastab maa tegelikule kujule geoid (kujuteldav keha, mille pind on kõikjal risti loodjoontega ning ühtib merede ja ookeanide häirimata veepinnaga). Kuna geoidi kuju ei ole võimalik mat. valemitega kirjeldada, siis kasut. täpsete geodeetiliste arvutuste jaoks geoidi mat. mudelit pöördellipsoidi a=6378,137 km pikem pooltelg b=6356,7573141 km lühem pooltelg f=1/298,257222101 lapikus Kaasajal kasut. uurimistöödes GPS mõõtmisi (GPS mõõtmiste aluseks on geotsentrilised koordinaadid). 2. Geograafilised koordinaadid. Geograafilisteks koordinaatideks on geograafiline laius ja pikkus. Geograafilised koordinaadid määratakse kas astronoomiliste vaatlustega või arvutatakse ellipsoidi pinnale redutseeritud geodeetiliste mõõtmiste andmetest. Kaasajal määratakse GPS mõõt
MATEMAATLINE ANALÜÜS II 1. KORDSED INTEGRAALID Kordame kõigepealt mõningaid teemasid Matemaatlise analüüsi I osast. 1.1 Kahe muutuja funktsioonid Kui Tasndi R 2 mingi piirkonna D igale punktile x, y D seatakse ühesel viisil vastavusse arv z, siis öeldakse, et piirkonnas D on määratud kahe muutuja funktsioon z f x, y . Piirkoda D nimetataksefunktsiooni f määramispiirkonnaks. See on mingi piirkond xy-tasandil. Näide 1. Poolsfääri z 1 x2 y 2 määramispiirkonnaks on ring x 2 y2 1. Funktsiooni z ln x y määramispiirkonnaks on pooltasand y x (sirgest y x ülespoole jääv tasandi osa: vaata joonist). Kahe muutja funktsioon ise esitab pinda xyz-ruumis (ruumis R 3 ). Näide 2. Funktsiooni z x2 y 2 graafikuks on pöördparaboloid (vaata allpool olevat joonist) Kahe muutuja funktsiooni f nivoojoonteks nimetatakse jooni f x, y c Näide 3. Tüüpiline näide nivoojoo




















Kõik kommentaarid