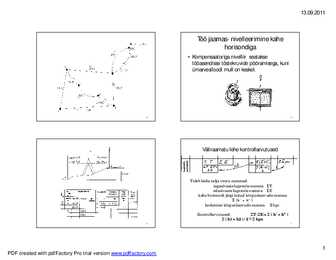
09.2011 Vahepunktidele kõrguste leidmine Ülesanne · Vahepunktide kõrgused arvutatakse · Arvutada punkti B kõrgus kõrguskasvu instrumendi horisondi meetodil. meetodil ja vahepunktide 1 ja 2 kõrgused · Tagasivaate reeperi kõrgusele liita sellelt instrumendi horisondi meetodil. punktilt tehtud tagasivaate latilugem. · Vahepunkti kõrguse leidmiseks tuleb instrumendi horisondi kõrguselt lahutada vahepunkti latilt saadud lugem. · Hi=HB+T · HV= Hi- E 52 53 54
Autoveoseaduse analüüs Seaduse eesmärgiks on sätestada riigisiseste ja rahvusvaheliste autovedude normid, lisaks autojuhi ametikoolituse alused. Siia seaduse alla ei kuulu kaitseväe, kaitseliidu ja välisesinduste autovedude korraldus. Eraldi käsitletakse tasuline autovedu, oma kulul korraldatav vedu, riigisisene autovedu, kombineeritud vedu. Seaduses on täpselt punkt punktilt kirjas mida tohib ja mida mitte. Nii nagu seda on igas seaduses. Siinkohal loetlen lühidalt millest kirjutati: 1. Mida iga eraldi autoveoliik täpsemalt tähendab, sellele kehtestatud eeskirjad, mille alusel sõita tohib. 2. Täpsemalt oli kirjas mis alustel väljastatakse tegevusluba, tegevusloa ärakiri, juhitunnistus ja sertifikaadid. 3. Mis alustel tunnistatakse kehtetuks või üldse ei anta välja tegevusluba, tegevusloa
Arengutrendid Alates 1991. Peruu IAI on Aastast 1980 on (1980-2011) aastast on Eesti lakkamatult Austraalia IAI IAI pidevalt tõusnud alates pidevalt tõusnud, tõusnud, tõus 1980. Aastast, kuid alates stabiliseerus Peruu on 1980. aastast 2005 2005. aastal. aasta 0,574 pole tõus olnud punktilt tõusnud oluliselt suur, 0,741 punktini stabiliseerus. 31 aastal 2011 aastaga on Austraalia saanud juurde 0,079 punkti. Arengurühm Väga kõrgelt Kõrgelt Väga kõrgelt
ametit proovima. Liiklus huvitab mind juba sellel põhjusel, et juba lähitulevikus soovin ka mina autojuhiks saada. Loomulikult heaks autojuhiks. Seega tekkiski küsimus: Kuidas olla hea autojuht? Mõnes mõttes on vastus lihtne: järgi liikluseeskirju! Loogliline ju! Arvan, et tegelikult see nii lihtne polegi. Pole ju kõik must-valge. Ma ei väida seda, et liikluseeskirju oleks raske järgida või, et seda ei peaks tegema, aga on olukordi kus liikluseeskirjade punkt- punktilt järgimine ei ole kõige parem variant. Tooksin sellise näite: Tallinn-Tartu manatee, terve kolonn sõidab 100 km/h ja see kolonn jõuab järele autole mis liigub 90 km/h. Nüüd mõelge, mis oleks õigem, kas see, et aeglasem auto jätkaks rahulikult sõitu keset oma sõidurada ja sellega tekitades ohtlikke möödasõite või tõstes oma kiirust samuti 100 km/h? Samuti on võimalus, et kui autojuht ise reegleid ei soovi rikkuda, siis on tal võimalus tee ääre poole sõites kolonn mööda
V. Kui lugemite vahe on 180 kraadi, on nõue täidetud. Nõue on täidetud Lugemite erinevus 180 kraadist kannab nimetust (kahekordne) kollimatsiooniviga 2c. Justeerimiseks tuleb leida lugem Õ (ring vasakul asendi jaoks), mis on veast c vaba. Järgnevalt tuleb alidaadi peenliigutuskruvist keerata horisontaalringi lugemiks Õ, selle tulemusel läheb niitristi keskpunkt vaadeldavalt punktilt ära. Justeerimiseks tuleb horisontaalsete justeerimiskruvide abil nihutada niitristi, kuni viseerimiskiir läbib vaadeldavat punkti. Kollimatsioonivea mõju kaob horisontaalnurga mõõtmisel täisvõttega. Horisontaaltelg Esitatud nõude täitmiseks peab eriti täpselt olema täidetud esimene nõue, st vertikaaltelg peab olema vertikaalne. Teodoliit asetatakse ca 1015 m kaugusele kõrgest hoonest.
Joobes juhtimise vähendamiseks tuleks teha palju teavitustööd, näiteks kampaania "Sõida kaine peaga!" Samuti mõjub minu arvates hästi sokiteraapia stiilis teavitustöö, sest ega paljud inimesed muidu aru ei saa, tuleb panna nad tõsiselt mõtlema. On lihtne ja loogiline, et hea autojuht järgib liikluseskirju, aga tegelikult pole see alati nii lihtne. Ei saa väita, et liikluseeskirju oleks raske järgida või et seda ei peaks tegema, aga on olukordi, kus liikluseeskirjade punkt-punktilt järgimine ei ole kõige parem variant. Näiteks: Tallinn-Tartu maantee, terve kolonn sõidab 100 km/h ja see kolonn jõuab järele autole, mis liigub 90 km/h. Mis oleks õigem, kas see, et aeglasem auto jätkaks rahulikult sõitu keset oma sõidurada ja tekitaks sellega ohtlikke möödasõite või tõstaks oma kiirust samuti 100 km/h? Arvan, et ohutum variant on pigem tõsta kiirust, aga samas ei pea ma ka seda õigeks, sest nii tekib ju doominoefekt ja kõik hakkavad kihutama
2. Avab ettevõttele uued rahaallikad: ligipääs porfelliinvestorite rahale 3. Suureneb avalikkuse tähelepanu ettevõtte suhtes-parandab mainet 24)Tallinna börsi ja Eesti Väärtpaberikeskuse loomine Väärtpaberituru alged tekkisid Eestis 1991. a. 1994. a. loodi Eesti Väärtpaberikeskus. Kauplemine väärtpaberitega elavnes tänu sellele, et turule tulid hea mainega ettevõtted. 31. mail 1996. a. loodi Tallinna börs. 1997. a. oktoobris toimus börsikrahh. Talse langes 493- lt punktilt 93-le punktile. Talse on Tallinna börsi aktsiahinna indeks. Tallinna börsi avamisel oli Talse = 100-ga. Aktsiate keskmiste turuhindade võrdlemisel algpäevaga saadakse Talse iga päeva kohta. Tallinna börs langes mitmeks aastaks varjusurma. 25)Millised uutused toimusid Tallinna börsil 21. Sajandil? * 2000. Aastal viidi Tallina börs ja Eesti Väärtpaberikeskus ühtse juhtimise alla (HEX grupp suurim omanik) * 2003. a. ühines HEX Stockholmi börsiomaniku OM-ga * 2004. a
(lk 205 õpikus1). Kollimatsioonivea mõju kasvab selle suuna kaldenurga suurenemisega. Inklinatsiooniviga tekib kui pikksilma pööramistelg ei ole risti teodoliidi põhiteljega. 10. kuidas teodoliiti paika panna, teodoliidi telgede paika panemine(lk 214 õpik1) 11. otseülesanne/vastuülesanne teoreetiliselt - mis see on ja kuidas teha Geodeetiliseks otseülesandeks on ülesanne, kus on antud punkti A koordinaadid (xA, yA), kaldenurk punktilt A punkti B (AB) ning kahe punkti vaheline kaugus dAB. Antud: xA, yA, AB, dAB X yAB B Leida: xB, yB ? XB xB =xA+ xAB AB yB =yA+ yAB x,y- koordinaatide juurdekasvud, "+" vôi "-". d AB xAB Tuleb arvestada millise veerandi nurgaga on tegemist. X A A xAB = dAB *cosAB
ppm. RTK on kindlasti tänapäeva maamõõdutöödes enim kasutust leidev meetod. Lisaks laieneb kasutus ka erinevate mehhanismide juhtimisele (nt tee-ehitus jpm). RTK ei ole viimaste aastate tehnoloogia, see jõudis kasutajateni 1993. aastal kui valmisid selleks vajalikud riist- ja tarkvaralised lahendused. RTK mõõtmistel paikneb üks vastuvõtjatest, nn baasjaam, tuntud koordinaatidega punktil, teine (teised) liiguvad ühelt määratavalt punktilt teisele. Vajalik on baas- ja liikuvjaama vaheline reaalaja andmeside (raadio-, mobiilside või Internet). Mõõdetakse baas- ja liikuvjaama vahelist vektorit. Mõõdetud vektoritest arvutatakse reaalajas kas kogu liikumistrajektoori või valitud punktides tehtud veidi pikemaajaliste seisupunktide koordinaadid. [6] [7,lk 240,243] 3.1 Trimble R4 GPS Peamised omadused: Täpne, töökindel ja vastupidav süsteem Põhineb tõestatud ja usaldusväärsel Trimble tehnoloogial
kasutatakse liiklusvahendite liikumistrajektooride jälgimiseks, näiteks aeropildistamisel. Liikuv vastuvõtja registreerib asukoha teatud ajavahemike järel või välise ärrituse mõjul (näiteks aerofotokaamera katik). Kui mõõdistamine õnnestub, saadakse liiklusvahendi liikumistrajektoor mõne sentimeetri täpsusega. Kinemaatiline (Stop and Go) meetod Siin liikuv vastuvõtja registreerib nõutaval punktil andmeid mõnest sekundist mõne minutini. Vastuvõtja liikumisel punktilt punktile ei tohi satelliitide signaal katkeda. See meetod sobib kaardistamiseks avatud maastikul ning algtundmatud määratakse enne mõõtmisi. Soovitav on viie või enama satelliidi signaali kasutamine. Vastuvõtjate lähteasend peab olema määratud vastavalt juhendile enne mõõtmisi. Kinemaatiline mõõtmine peaks algama ja lõppema tuntud punktil. Epohhi salvestamise intervall peaks olema 1-5 sekundit, võib ka kuni 15 sekundit . Pseudokinemaatiline meetod
töökeskkonnaga seotud küsimuses, töökeskkonna parandamise abinõude kavandamisel arvestab nende ettepanekutega ning kaasab nad kavandatu elluviimisele. Praktiliselt realiseerub konkreetses asutuses? Tavaliselt tööandja sellele suurt tähelepanu ei pööra. Kui riskianalüüs ongi tehtud antakse see korraks tööle asudes lugeda ja allkirjastada ja sellega asi piirdubki. Osad asutused täidavad punkt-punktilt aga osad kehiselt. 4. Kuidas saab töökohas tervisekahjustusi ära hoida ja vähendada? Esita nii tööandja- kui ka töötajapoolsed abinõud. V: Tööandja peab informeerima ja kontrollima kas täidetakse riskianalüüsis olevaid punkte. Andma isikukaitsevahendeid. Korraldama esmajuhendamist, väljaõpet ja täiendjuhendamist. Töötaja peab tegema tööd nii nagu tööjuhendis kirjas. Järgima tööandja poolt tehtud ettekirjutusi
Valemiks on Ek=mv2/2. Mõõtühikuks džaul. POTENSIAALNE ENERGIA – Energialiik, mis on tingitud keha asendist ja mõjust teiste kehade suhtes. Valemiks Ep=mgh. Ühikuks 1 džaul. SOOJUSENERGIA – Soojusenergia on soojusenergia, mida kasutatakse energeetilistel eesmärkidel. E=3/2kT SOOJUSHULK – Füüsikaline suurus, mis iseloomustab soojusvahetuse teel ülekantud energiahulka. Soojushulka tähistatakse tähega Q. Q=c*m*deltat TÖÖ – Füüsikaline suurus, mis iseloomustab ühelt punktilt teisele kantud energia hulka. Töö tähis on A. Mõõtühikuks džaul. Valemiks A=F*s VOOLUTUGEVUS – Näitab, kui suur elektrilaeng läbib juhi ristlõiget ühes ajaühikus. Voolutugevust mõõdetakse ampermeetriga. Selle ühikuks on 1 Amper ja tähiseks A. Voolutugevust arvutatakse valemist I=q/t või I=U/R. PINGE – Füüsikaline suurus, mis iseloomustab kahe punkti vahelist elektrivälja potentsiaalide erinevust. Tähiseks on V. Ühikuks volt. Pinget saab mõõta voltmeetriga
Eksamiabimees 1.Geodeetiline otseülesanne. Geodeetiliseks otseülesandeks on ülesanne, kus on antud punkti A koordinaadid (xA, yA), kaldenurk punktilt A punkti B (AB) ning kahe punkti vaheline kaugus dAB. Antud: xA, yA, AB, dAB X yAB B Leida: xB, yB ? XB xB =xA+ xAB AB yB =yA+ yAB x,y- koordinaatide juurdekasvud, "+" vôi "-". dAB xAB Tuleb arvestada millise veerandi nurgaga on tegemist. XA A xAB = dAB *cosAB yAB = dAB *sinAB
2. Kuhu asetatakse objekt SEM kolonnis? Objekt asetatakse kolonni all-osasse, alumiiniumist kettale. 3. Kui suur on SEM suurendus? Pinnadetailide kujutise suurendamine 10X kuni ~500 000 X. 4. Kui sügav vaakum on skaneeriva elektronmikroskoobi sees? SEM kolonnis on vaakum on 10 -5 torri 5. Kuidas määratakse suurendust SEMs? Lineaarmõõtude suhtest ekraanil nähtaval kujutisel ja objektil 6. Kuidas saadakse SEMs kujutis? · Saadakse punkt-punktilt skaneerimise teel. · Seletatakse pikseli mõiste abil piksel on kujutise vähim element suurusega 0,1 mm, omab kindlat intensiivsust, ei oma sisemist struktuuri. · Igale pikselile ekraanil peab vastama piksel objektil. · Mikroskoobi lahutusvõime peab optimaalses reziimis olema võrdne objekti pikseli suurusega. · Sügavusteravus on suurusjärk suurem kui OM sama suurenduse juures ruumiline kujutis.
– ruumiline (kohast lähtuv) liigendus (meil-mujal, lähedal-kaugel, esiplaanil- tagaplaanil); – loeteluliigendus (olulisest vähem oluliseni, üldisest üksikuni ja vastupidi); 8 – temaatiline liigendus (teemat vaadeldakse osade kaupa või eri aspektidest); – tuntusliigendus (tuttavast tundmatuni, lihtsast keerulisemani); – võrdlev liigendus (kahe nähtuse süsteemne võrdlemine punkt-punktilt); – seostav liigendus (põhjus-tagajärg, nähtus-põhjus); – probleemikeskne liigendus (küsimus-vastus, probleem-lahendus, õige-väär). (Erelt jt. 2007: 66) Suurt rolli teksti oluliste mõtete väljatoomisel mängib ka nende paigutus kirjutises. Selleks, et kõige tähtsam informatsioon lugejale kergelt silma hakkaks, paigutatakse see kas teksti algusesse või lõppu. (Erelt jt. 2007: 30) 1.2.2 Konkreetsus
on täpselt 180o, siis on nõue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis Keskmiste lugemite vahe võrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1180o)+(RV2-RP2180o)/4. Lubatud viga 1'-2'. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemi tegemise skaalale lugem RV-c või RP + c, tulemusena on niitristi keskpunkt punktilt ära nihkunud. Justeerimiseks nihutatakse niitristi horisontaalsete justeerimiskruvide abil, kuni viseerimistelg läbib punkti. Justeerimist kontrollitakse. Ka nõuet vvHH tuleb uuesti kontrollida. Kollimatsioonivea mõju kaob nurga mõõtmisel täisvõttega. 5.Horisontaaltelg peab olema risti vertikaalteljega (HHVV) Kõik eelnevad nõuded peavad olema täidetud. Eriti täpselt peab olema vertikaaltelg loodis
on täpselt 180o, siis on nõue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis Keskmiste lugemite vahe võrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1±180o)+(RV2-RP2±180o)/4. Lubatud viga 1'-2'. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemi tegemise skaalale lugem RV-c või RP + c, tulemusena on niitristi keskpunkt punktilt ära nihkunud. Justeerimiseks nihutatakse niitristi horisontaalsete justeerimiskruvide abil, kuni viseerimistelg läbib punkti. Justeerimist kontrollitakse. Ka nõuet vvHH tuleb uuesti kontrollida. Kollimatsioonivea mõju kaob nurga mõõtmisel täisvõttega. 5.Horisontaaltelg peab olema risti vertikaalteljega (HHVV) Kõik eelnevad nõuded peavad olema täidetud. Eriti täpselt peab olema vertikaaltelg loodis
Kui lugemite vahe on täpselt 180 o00', siis on nõue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis Keskmiste lugemite vahe võrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1180o)+(RV2-RP2180o)/4. Lubatud viga 1'-2'. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemimikroskoobile lugem RV-c või RP + c, kusjuures niitristiku kese nihkub vaadeldavalt punktilt. Järgnevalt lõdvestatakse kergelt vertikaalsed paranduskruvid ja nihutatakse horisontaalsete paranduskruvidega niitristiku kese uuesti punktile. · Horisontaaltelg peab olema risti vertikaalteljega (HHVV)(inklinatsiooniviga). Kõik eelnevad nõuded peavad olema täidetud. Eriti täpselt peab olema vertikaaltelg loodis. Kontrolliks viseeritakse RP asendis kõrgel asuvale punktile ja märgitakse punkti projektsioon instrumendi kõrgusel. Sama teha ka pikksilma RV asendis.
Kui lugemite vahe on täpselt 180 o00’, siis on nõue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis Keskmiste lugemite vahe võrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1180o)+(RV2-RP2180o)/4. Lubatud viga 1’-2’. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemimikroskoobile lugem RV-c või RP + c, kusjuures niitristiku kese nihkub vaadeldavalt punktilt. Järgnevalt lõdvestatakse kergelt vertikaalsed paranduskruvid ja nihutatakse horisontaalsete paranduskruvidega niitristiku kese uuesti punktile. Horisontaaltelg peab olema risti vertikaalteljega (HHVV)(inklinatsiooniviga). Kõik eelnevad nõuded peavad olema täidetud. Eriti täpselt peab olema vertikaaltelg loodis. Kontrolliks viseeritakse RP asendis kõrgel asuvale punktile ja märgitakse punkti projektsioon instrumendi kõrgusel
Kui keskmiste lugemite vahe on täpselt 180 o, siis on nôue täidetud. Kui ei siis antakse limbile uus asend, vabastades limbi kruvi ning keerates korpust 180o ning tehakse uued lugemid RV ja RP asendis. Keskmiste lugemite vahe vôrdub kahekordse kollimatsiooniveaga. Kollimatsiooniviga: c = (RV1-RP1±180o)+(RV2-RP2±180o)/4. Lubatud viga 1'-2'. Vea parandamiseks pannakse alidaadi peenliigutuskruvi abil lugemi tegemise skaalale lugem RV- c vôi RP+c, tulemusena on niitristi keskpunkt punktilt ära nihkunud. Justeerimiseks nihutatakse niitristi horisontaalsete justeerimiskruvide abil, kuni viseerimistelg läbib punkti. Justeerimist kontrollitakse. Ka nõuet vvHH tuleb uuesti kontrollida. Kollimatsioonivea môju kaob nurga mõõtmisel täisvõttega. 5.Horisontaaltelg peab olema risti vertikaalteljega (HHVV) Kôik eelnevad nôuded peavad olema täidetud. Eriti täpselt peab olema vertikaaltelg loodis.
Binoklitega tuleb vaid täpsustada silmaga avastatut, sest pidev binokli kasutamine väsitab silma väga kiiresti. Vaatleja ei pea häbenema oma väsimust. Tundes võimete langust, peab ta paluma puhkust. Päeval peab vaatleja peatama vaate teatud punktil ja fokuseerima sellele oma silmad mõneks ajaks. Seejärel viiakse vaade üle järgmisesse punkti ja korratakse sama. Liiga kiire pilgu üle viimine ühelt punktilt teisele ei tule vaatlusele kasuks. Öisel ajal adapteerub silm pimeduses (ka punases valguses) täielikult alles 30 minutiga. Adapteerumine kaob kiiresti eredas valguses. Öösi on vähevalgustatud objektid märgatavad vaid siis, kui nad ei ole vaatlusvälja keskel. Märganud midagi, peab vaatleja uurima kogu lähipiirkonda, vaadates objektist veidi mööda. Sama põhimõte kehtib ka binokli kasutamisel öisel ajal
tegevus, tuleb väita, et kogu loomariik praktiseerib seda. Ka inimlapsed järgivad oma loomulikke instinkte seni, kuni nende vagad vanemad neid rikkunud pole. On kurb tõsiasi, et seksuaalne süütunne kandub muutumatuna üle vanematelt lastele. Päästmaks meie lapsi nende vanemate ja vanavanemate haiglasest seksuaalsaatusest, tuleb mineviku perversne moraalikoodeks sellisena avalikustada, nagu ta oli: pragmaatiline reeglite kogu, mis meid punkt-punktilt järgides hävitaks! Kui me ei vabasta end nüüdisaegse ühiskonna naeruväärsetest seksistandarditest (sealhulgas ka niinimetatud seksrevolutsioon), ei kao nendest lämmatavatest reeglitest põhjustatud neuroos kuhugi. Satanismi uuest ja mõistlikust moraalist kinnihaaramine võib ja saab areneda ühiskonda, kus lapsed võiksid üles kasvada tervislikult, tänapäevase haige moraali laastava mõjuta. MITTE KÕIK VAMPIIRID EI IME VERD
jälle tema kirjelduslik informatiivsus. Pidades võimalikuks nii ono- masioloogilist kui ka semasioloogilist lähenemist, loobub TCT ühest võimalikust liigitusalusest, mille abil saaks kirjeldatavat distsipliini sügavama käsitluse huvides kitsamalt piiritleda. Sotsiokognitiivne terminoloogia Rita Temmermani sotsiokognitiivse terminoloogia idee (2000) on aren- datud selgelt Viini koolkonnale vastanduvaks terviklikuks teooriaks. Kuigi Temmerman esitab oma teooria otsese punkt-punktilt vastandusena traditsiooniliste Viini arusaamadega, leidub tegelikult ka sarnasusi, nende hulgas onomasioloogia-semasioloogia küsimuseski. Lähenemissuuna poolest on sotsiokognitiivne terminoloogia ikkagi wüsterlikult onomasioloogiline ning eristab end selgelt leksikograafiast – nii üld- kui ka oskusleksikograafia on selle teooria kohaselt sema- sioloogiline. Siin teeb Temmerman täpsustuse, mille Cabré tegemata jättis, vaadeldes lahus onomasioloogilist ja semasioloogilist tööd
täitmata. Kui raamat läbi loetud, hakati tema andmete põhjal asju nende peiduurgastest välja tooma. Sellejuures selgus, et raamatupidamine oli täiesti korralik ja täpne. See asjaolu tegi juba kõigile nalja, isegi härra Maurusele enesele. Sest mida paremat sa võid tahta, kui et loed raamatust: kahvel, nuga või lusikas niisugune ja niisugune, peidetud Siberisse selle ja selle laua vahele, -- ning sa lähed, raamat käes, loed lauavahed ilusasti sellelt või teiselt tähendatud punktilt ära ja võtad asja välja, nagu oleksid sa tema ise alles eile või täna sinna pistnud. Ainult ühest ei saadud aru, nimelt: miks oli varastatud asjade seas niipalju vanu ja vigaseid? Härra Maurus oli sellest küsimusest sedavõrt huvitatud, et jättis Laane veel üheks ööks oma katuse alla ainult selleks, et teda pinnida ja temalt kõik ta saladused välja muukida. Aga ta nägi asjatut vaeva, ja järgmisel päeval sõitis poiss ära, ilma et härra Maurus oleks saanud oma