TE.0272 PÕLLUNDUSMASINAD 3,0 AP
Kordamisküsimused
1.
Atrade liigitus.
Otstarbe järgi eristatakse üld- ja eriatru. Üldader on ühtlasi põlluader, mida kasutatakse
kultuuristatud põldude kündmiseks. Eriader (spetsiaalader) on erilaadse kasutusalaga (soo-,
metsa-, aia-,
istandiku -, võsa-, kraaviadrad jms).
Töötamise iseloomu (liikumisviisi) järgi liigituvad adrad ribas- ja süstikkünniatradeks
(joonis 1.1). Ribaskünniader on
enamlevinud ja seda peetatakse tavaadraks (joonis 1.2).
Sellel on üks komplekt paremale pööravaid sahku, mistõttu künda tuleb ribade (künnieede
kaupa) või ringi liikudes. Seevastu süstikkünniadrad töötavad põllul edasi-tagasi liikudes,
tagades ilma algus- ja lõppvagudeta silekünni. Seepärast nimetatakse neid ka
silekünniatradeks.
2. Adraterade liigitus.
Adraterad (joonis 1.8) liigitatakse kuju järgi
trapets -, põsk-, nokk- ja peitelteradeks,
kusjuures igal teral on lõikeserv, nina,
kand ja selg. Trapetstera lõikeservapoolne alakülg
kujundatakse paksemana tagamaks metallivaru kulunud
tera lõikeserva teritamiseks.
Nokkteral on selline paksend vaid tera ninaosas. Põskteral on nina külgserval tugiplaat
(tugevdusplaat). Peiteltera on niisugune, mille ninaosa on kujundatud vahetatava plaadina
(plaatpeitel) (joonis 1.9) või nihutatava varvana (varbpeitel, nihkpeitel).
3. Adra
saha geomeetriline iseloomustus.
Adra saha töö tehnoloogilist protsessi võib kujutada teostatuna kolme elementaarse
kiilu poolt (joon. 3.3, a), mis liiguvad x-telje sihis. Esimene
kiil töönurgaga (xz-
tasapinnal )
eraldab künniviilu vao põhjast (xy-tasapinnast) ja tõstab selle üles. Koos sellega viil
deformeerub ja praguneb, st. kobestub.
Teine kiil töönurgaga (xy-tasapinnal) eraldab künniviilu vao
seinast (xz-tasapinnast) ja
nihutab selle kõrvale. Seejuures viil samuti deformeerub ja praguneb, st. kobestub, kuid
juba teises sihis.
Kolmas kiil töönurgaga (yz-tasapinnal) kallutab künniviilu. Kui nurga muutumist
kujutleda piirides 90° tihendamine (joon. 3.4, a). Teatud tiheduse
juures hakkab mullaviil painduma (joon 3.4 b). Edasi toimub mulla pragunemine
nihkepindade frondi
nurgaga (joon 3.4 c). Kuivad
savimullad purunevad tükkidena
(joon. 3.4, d), mistõttu vaopõhi jääb konarlik.
1 4. Silehõlmade tehnoloogiline iseloomustus.
silinderhõlm väga hästi kobestab, halvasti pöörab.
5. Hõlmadra abitööseadised.
Hõlmadra saha abiosad on pöid,
tald ja säär (ankur, vannas). Adrasahk ühendub
raamiga toendi vahendusel, mida olenevalt selle ehitusest nimetatakse kas:
ankruks
massiivne ,
keeruka kujuga stantsitud või õõnes terasvalikonstruktsioon, kinnitub
raamile jäigalt, töötab paindele;
vannaseks liigendiliselt raamiga ühendatud, lihtsa kujuga ümara või ristkülik ja
ristlõikega, töötab tõmbele;
sääreks sihvakam, lihtsa kujuga, toruja või ristkülikja ristlõikega, raamile jäigalt
kinnitatud.
6. Ribahõlma eelised ja puudused.
Eelised
Muld ei kleepu hõlma kluge; viilu murendamine on pööramine on
kvaliteetsem; ribade omavahelist asetust ja painet on võimalik muuta.
Puudused ei tea
7. Rippadra tehnoloogiline lõppseadistus.
Rippader
seatakse traktori hüdraulilise rippsüsteemi külge. Hüdrauliline rippsüsteem
koosneb rippseadmest ja hüdrosüsteemist. Hüdrosüsteemi peahüdrosilinder on sõlmeks,
mis ühendab hüdrosüsteemi rippseadmega.
8. Rippadra raami rõhtsuse ja töölaiuse tagamine.
Teine nõue haardelaiuse isesäilivus on täidetud, kui alumiste veolattide
projektsioonijooned rõhttasapinnale lõikuvad samuti masinast
eespool asuvas punktis 3
(joonis 3.17, b). Kui näiteks masina tööorgani takistusele (
kivile ) sattumise tagajärjel
paiskub masina raam tööorganitega vasakule kõrvale (joonis 3.17, b), siis pöördub
tööorgan normaalse liikumissihi suhtes. Pöördumine peab olema aga sellise suunaga, et
agregaadi edasisel liikumisel suunduks masin tagasi paremale. Nagu
selgub skeemilt joonis
3.17, b, vastab sellele nõudele punkti 3
asetus masinast eespool. Vastasel juhul (joonis
3.18, b) on aga olukord vastupidi: tööorgan tungib üha enam vasakule. Süsteem on seda
tundlikum , mida suurem on nurk (joonis 3.17, b). Järelikult on rippseadme
kahepunktiline skeem (joonis 3.16, c) sellest
seisukohast eelistatum , võrreldes
kolmepunktilisega.
9. Pöördadra töövalmendus.
10. Kivikaitsemehhanismide tüübid.
1) kaitseobjekti järgi: ühine kogu adrale (ühiskaitse) ja eraldi igale sahale
(individuaalkaitse);
2) tööprotsessi
kulgemise järgi: mitteautomaatne kui kivi ületamise protsess nõuab
traktoristi sekkumist sellesse ja automaatne protsess kulgeb traktoristi abita;
3) jõuseose säilumise järgi kaitseobjekti ja kaitsme vahel: katkestav ja mittekatkestav;
4) kaitseseadise füüsikalise tööpõhimõtte järgi:
mehaaniline , hüdrauliline, pneumaatiline ja
hüdropneumaatiline;
5) kaitseelemendi (kaitsme) järgi: tihvt-, vedru-, hoob- (varb-), hüdro-,
pneumo - jms
kaitse.
2 11. Lauskultivaatori ülesanne, agronõuded ja liigitus.
Lauskultivaator on kogu põllupinda töötlev mullaharimise masin, mis peab täitma järgmisi
ülesandeid:
1) mulla kobestamine ja õhutamine;
2) mulla
segamine ja murendamine;
3) põllupinna
tasandamine ;
4) umbrohu hävitamine.
AGRNÕUDED
1) lauskultiveerida tuleb õigeaegselt, st kui mullapind on tahenenud ja elutegevus mullas
alanud;
2) lauskultiveerida tuleb nõutud sügavusega: mulla
kuivamise kiirendamise eesmärgil
sügavusel 10...15 cm, kuiva mulla puhul ja vahetult külvieelselt
piisab sügavusest 6...8
cm;
3) lauskultiveeritud põllu
pindmine kiht peab olema hästi kobestatud ja murendatud,
umbrohujuured lõigatud ja pinnale kistud;
4) lauskultiveerimine peab toimuma ilma
niiskete ja märgade aluskihiklompide pinnale
toomiseta;
5) lauskultiveerimisega ei tohi kaasneda mulla tolmustamist (mullasõmerate
purustamist )
ja tihendamist;
6) lauskultiveeritud põllu pind peab olema
tasane , ilma vaonditeta ja vallideta;
7) lauskultiveeritud põllul ei tohi esineda vahelejätte ja töötlemata põlluosi.
Lauskultivaatoreid liigitatakse mitmete tunnuste järgi järgmiselt:
1) otstarbe järgi: üld- ja
eriotstarbelised ;
2) haakimisviisi järgi:
haake -,
ripp - ja poolrippkultivaatorid;
3) haritava kihi järgi: külvi-, künni- ja aluskihikultivaatorid;
4) põhiülesande järgi: kobestus- ja rohimiskultivaatorid;
5) tööseadise liigi järgi: käpp- ja piikultivaatorid;
6) tööseadise tüübi järgi: S- ja C-kujuliste vedrupiidega,
hanijalg - ja peitelkäppadega jms.
12. Lauskultivaatori ehitus ja tööseadised.
Lauskultivaatori koostisosad on raam,
veermik , haake- ja riputusseadis, töö- ja
reguleerseadised. Peale nende võivad olla veel lisaseadised (väetusseadis, kivikaitseseadis
jms).
Veermik koosneb enamasti kahest kande- või tugirattast koos nende telgedega. Rattad
võivad olla paigutatud raami kõrvale (külgedele), alla (joonis 3.1) või taha ning kujundatud
üksik- või
tandem ratastena (balanssiirratastena). Viimane kujutab endast ühisele
kiikteljele toetuvat rattapaari, mis tagab künkliku künnipinna sujuvama ja tõugeteta
kopeerimise. Tihti kujundatakse tandemratas nii, et kumbki ratastest liigub oma jälge
mööda.
Tööseadis (käpp, pii) koosneb terast ja säärest (ankrust). Tera on tööosa, mis peitpeapoltide
abil kinnitatakse sääre alaotsale. Terade kuju järgi eristatakse hanijalg- ja peitelteri
(joonised 3.3 ja 3.6). Tera nimetatakse ka käpa- või piiotsakuks (-otsaks). Vedrupiid
liigituvad sääre (ankru) kuju järgi C- ja S-kujulisteks, mõlemad omakorda veel jäikadeks ja
elastseteks (joonised 3.3 ja 3.4). Jäik C-pii on kogu ulatuses
nelinurkse ristlõikega
topeltvedrulehega,
elastsel C-piil on vedrusilmus, ristlõige on muutuva kujuga. Jäigal S-
piil on topeltleheline ülaosa, sääre ristlõige kogu ulatuses ühesugune nelinurk. Elastse S-pii
ristlõige on muutuv ja keskosas
ovaalne .
3 13. Lauskultivaatori töövalmendus ja töö
tehnoloogia .
Töövalmendus seisneb komplektsuse, koostamise õigsuse, tehnilise ja tehnoloogilise
seisundi kontrollimises ning tehnoloogilises seadistamises. Tehnilise seisundi
kontrollimisel pöörata tähelepanu järgmistele kohtadele:
1) polt- ja lõhisliidete kinnitatus;
2) vannaste, survevarraste, käpahoidikute, raami deformeerimatus;
3) määrde olemasolu rattalaagrites;
4) käpa- või piitera (-otsiku) kinnituspoltide peitpea ei tohi
ulatuda üle tööpinna
(joonis 3.9);
5) käpa- või piitera lõikeservad olgu
teravad : rohimiskäpa (hanijalgkäpa) lõikeserva paksus
mitte üle 0,5 mm, kobestuskäpal kuni 1,0 mm;
6) reguleerseadised ja -
kruvid liikugu vabalt.
Tehnoloogiline seadistamine seisneb lauskultivaatori tööseadiste seadmises nõutud
töösügavusele ja ühesugusele jäljevahele. Jäljevaheks nimetatakse tööseadiste poolt
jäetavate vaokeste (jälgede) keskjoonte põikisihilist vahekaugust. Jäljevahe on ühtlasi
tööseadise töölaius. Rohimiskäppadel (hanijalgkäppadel) peab jäljevahe olema b = 3...4
cm võrra väiksem käpa tööosa (tera) konstruktiivsest laiusest bk, tagades niiviisi
naaberseadise ülekatte _b ja kõikide umbrohujuurte läbilõikamise, seega b = bk _b.
TEHNOLOOGIA
1. enne töö algust veenduda, et traktori rippsüsteemi püsttõmmitsad oleksid veolattidega
ühendatud oma piklikavade kaudu.
2. Lauskultiveerimisel liigutakse agregaadiga süstikuliselt (edasi-tagasi), alustades põllu
äärest. Kui agregaadi järsk tagasipööre põllu otstel on raskendatud, siis võib kasutada
vahelduveelist liikumist.
3. Pööretel tuleb kultivaatori tööseadised kindlasti mullast välja tõsta, st et agregaadi pööre
tuleb
sooritada kultivaatori teisaldusasendis.
4. Esimeste läbimite (töökäikude) järel kontrollitakse töösügavust ja vajadusel
korrigeeritakse seda vastavalt mulla lõimisele, tihkusele (kõvadusele) ning põllu
tehnoloogilisele seisundile ehk tehnofoonile (künd, kultiveeritus vms). Külvieelsel
kultiveerimisel tuleb eelistada väikest (5...8 cm) või keskmist (8...12 cm) töösügavust,
arvestades seejuures ka piide või käppade jäljevahet.
4 5. Kultiveerimise kvaliteedi hindamisel võetakse arvesse töö tegemise õigeaegsust,
töösügavust ja selle ühtlust, põllupinna harjalisust ja tasasust, mõnikord ka mulla kobedust
ja panklikkust ning umbrohu hävitamise täielikkust.
6. kvaliteetid määramine.
14. Randaali ülesanne, agronõuded ja liigitus.
Randaal on kahest (harva kolmest või enamast) teineteise järel liikuvast sektsioonist või
reast koosnev ketasriist, mida endisaegadel nimetati ka ketasäkkeks või taldrikäkkeks.
Olenevalt olukorrast ja kasutamise eesmärgist on randaalil mitu ülesannet:
1) mulla segamine ja kobestamine,
2) põllupinna tasandamine,
3) väetise segamine mullaga,
4)
kamara (künnieelne) purustamine,
5) mättalise künni töötlemine,
6) umbrohu hävitamine.
Agronõuded randaalimisel on järgmised:
1) randaalida tuleb nõutud töösügavusega: kõige suurem on see sõnniku sisserandaalimisel
15 cm ja
rohkemgi , külvieelsel mullaharimisel piisab sügavusest 8...10 cm;
2) külvieelselt ja künnijärgselt randaalitud ning randaaliga kooritud põld peab olema tasane
ja
muld sõmeraline, umbrohujuured läbi lõigatud, mättad
purustatud , taimejäänused ja
väetis mullaga segatud;
3) randaalitud põllul ei tohi olla vahelejätte ja töötlemata põlluosi.
Randaale liigitatakse viie tunnuse järgi:
1) haakimisviisi järgi on haake-, ripp- ja poolripprandaale;
2) kasutusala järgi eristatakse põllu-, soo- (uudismaa), aia-, metsa- jms randaale;
3) kontuurskeemi järgi on X-kontuuriga (sümmeetrilised, kahepoolsed) ja V-kontuuriga
(ebasümmeetrilised, ühepoolsed) randaale (joonis 2.1);
4) tööosa (sfäärketta) kuju järgi on sileservkettalisi (sileda servaga) ja sälkservkettalisi
(sälkja, hambulise lõikeservaga) randaale ning nn segasüsteemseid, millel esisektsioon
on sälkservketastega ja tagasektsioon sileservketastega;
5) ühele kettale
langeva massi järgi eristatakse kergeid (15...40 kg), raskeid (40...100 kg)
ja üliraskeid (100...500 kg) randaale (tabel 2.1).
15. Randaali ehitus ja konstruktsiooni iseärasused.
Randaali koostisosad on raame, haake- ja riputusseadis, veermik, tööseadised ning juht- ja
reguleerseadised. Raam on nelinurkkontuuriga keeviskonstruktsioon (joonis 2.3), millele
jäigalt kinnitub haakevõi riputusseadis, liikuvalt aga tööseadised (kettapatareid) ja
kanderataste põlvtelg koos ratastega. Randaali tööseadis on sfäärketastest koostatud
kettapatarei. Selle põhimõtteline ehitus on samane ketaskoorli
omaga . Laagripukkide
vahendusel kinnituvad
patareid randaali raamile, kusjuures üks neist on liigendseoses, teine
aga nihutatav (tavaliselt välimine). Patareid paiknevad kahes teineteise järel asetuvas reas,
moodustades niiviisi eesmise ja tagumise
sektsiooni . Esisektsiooni patareikettad suunavad
mulla ühele poole, tagumised aga vastaspoole, kusjuures tagasektsiooni kettajäljed jäävad
eesmiste vahele (joonis 2.2). Sellega tagatakse mulla täielikum ja intensiivsem
läbitöötamine. Randaali
patarei koosneb 5...16 kettast. Mõnel randaalil on tagasektsiooni
ühel patareil ketaste arv ühe võrra suurem (võrreldes
teistega ). Selle nn liigketta ülesanne
on töödelda eesmiste patareide lahkala (puuteala). Paljudel randaalidel on tagasektsiooni
äärmised
kettad väiksema läbimõõduga, millega tagatakse naaberläbimite (töökäikude)
puuteala sujuvus. Patareide arv randaalil on 2...12, töönurk reguleeritav piirides 10...27°.
5 Nüüdisajal on hakatud kujundama randaale, mille kettad on paigutatud paralleelsetesse
ridadesse, kusjuures iga
ketas on individuaalse vannase abil kinnitatud raamitala külge ja
varustatud kummileevendiga. Sellist võib nimetada II-kontuurskeemiga randaaliks.
16. Mullaharimisäkete ülesanne, agronõuded ja liigitus.
Mullaharimisäkke on mulla pinnakihi (3...4 cm) lausharimise masin. On ka
reasharimisäkkeid, ent need kuuluvad taimehooldusmasinate rühma ja käsitletakse eri osas.
Osa lausharimisäkkeid on kasutatavad nii külvieelsel mullaharimisel kui ka
taimehooldustöödel (näit orase äestamisel), aga ka lauskülvatud seemnete (näit
heinaseemnete) muldaviimisel ehk sõnastamisel ning põllupinna külvijärgseks
tasandamiseks. Äkkega töötamine on äestamine, eristada võib
laus - ja reasäestamist.
Eristada saab ka külvieelset, külviaegset ja külvijärgset ehk kasvaegset äestamist,
kusjuures viimatinimetatu on jällegi taimehooldustöö. Külvieelne äestamine võib toimuda
ka üheaegselt kündmise, kultiveerimise jm tööga, külviaegne äestamine aga koos
külvamisega.
Mullaharimisäkke ülesanded on:
1) põllupinna tasandamine (silendamine);
2) mulla pinnakihi kobestamine, murendamine ja mullapankade purustamine;
3) umbrohu hävitamine;
4) kuivanud mullakooriku purustamine mulla õhutamiseks ja kapillaarkanalite
lõhkumiseks (põllu libistamisjärgselt ja oraste äestamise).
Üldiseks agronõudeks äestamisel on mullakihi ühtlane läbitöötamine töösügavuses ja
pindalaliselt. See üldnõue on täpsustatav järgmiste üksiknõuetega:
1) äestada tuleb õigeaegselt; kevadisel mullaharimisel tähendab õigeaegsus kõigepealt
mulla sobivat niiskust (kui muld ei kleepu tööseadistele), hooldusäestamisel on veel
oluline taimede arengustaadium;
2) äestada tuleb ettenähtud töösügavusega (tavaliselt 3...6 cm);
3) äestatud põllupind peab olema tasane (vaokeste sügavus mitte üle 4 cm);
4) mullakoorik peab olema purustatud ja äestatud muld peenesõmeraline (sõmera läbimõõt
mitte üle 3 cm);
5) umbrohutõusmed peavad olema välja rebitud ja kultuurtaimedest mitte üle 5%
vigastatud (näit orase äestamisel);
6) äestatud põllul ei tohi esineda vahelejätte ja töötlemata põlluosi.
Äkkeid liigitatakse mitmete tunnuste alusel järgmiselt:
1) otstarbe järgi:
mullaharimis - ja hooldusäkked;
2) tööseadise liikumise iseloomu järgi:
passiiv - ja aktiiväkked;
3) tööseadise kujunduse järgi:
pulk -, käpp-, biite- (tähik-), sõrmketas-, lüli-, varbrull-
(varbvalts-), hari-, (
kamm -) jms äkked;
4) tööseadise
omavahelise seose järgi: jäikpinnalised (raamiga) ja paindpinnalised
(raamita);
5) ühele tööseadisele (tööosale) langeva massi järgi eristatakse ka kergeid, keskmisi ja
raskeid äkkeid (eeskätt pulkäkete puhul).
17. Passiiväkete ehitud ja tööseadised.
Tööseadised. Äkke ehitus on
otseses sõltuvuses tööseadise kujundusest ja tüübist.
Passiiväkke tööseadisteks võivad olla
pulgad (pulkäke), hanijalgkäpad (käppäke, sõrgäke)
või vedrupiid (vedrupiiäke ehk vedruäke ja hariäke ehk kammäke). Pilgad on
sirged või
kõverad ning ümara, ruutja või ovaalse ristlõikega. Hanijalgkäpad on kahepoolse
6 rõhtlõiketeraga nagu rohimiskultivaatorilgi. Vedrupiidena kasutatakse nii S- kui ka C-
kujulisi.
Passiivne pulkäke koosneb raami piki- ja põiklattidest, mis moodustavad tasandilise
sõrestiku ja mille külge on jäigalt kinnitatud pulgad. Enamlevinud on niisugused, mille
piki- ja põiklattidest koosnev raam moodustab siksakilise kontuuriga tasandsõrestiku.
Seepärast nimetatakse seda ka siksakäkkeks. Lattide lõikepunktides paiknevad pulgad on
ühtlasi nende õhenduspoltideks. Äkke raami põiklatid on sirged, pikilatid võivad olla kas
siksakilised või sirged. Lattide materjalina kasutatakse kas riba- või profiilterast (U-terast).
Nelinurkse ja ovaalse ristlõikega pulgad kinnitatakse raamile nii, et need liiguksid oma
teravservaga ees. Ühele pulgale langeva äkke
kogumassi järgi eristatakse raskeid ( 2 kg),
keskmisi (1,5 kg) ja kergeid (1 kg) siksakäkkeid.
Rask - ja keskäkete pulgad on ruutja,
rombja või ovaalse ristlõikega. Kui
pulga asemele on kinnitatud väike hanijalgkäpp, siis
nimetatakse seda käppäkkeks. Kergäkke pulgad on ümara ristlõikega, seda nimetatakse
seemendus - ehk külviäkkeks ning kasutatakse reaskülviku järele haagituna.
Võrkäke on kujundatud silmustatud pulgalülidest, mistõttu moodustub maapinna konarusi
hästi kopeeriv lüliline liigendraam. Seepärast on võrkäke sobiv hooldusäkkeks.
Tööprotsessis toimub pulgalülide pidev omavaheline liikumine, mille
kutsuvad esile
põllupinna konarused. Sellest tulenevalt võime võrkäket vaadelda ka vabaaktiivmasinana
(poolaktiiväkkena).
Lüliäke koosneb harkjatest lülidest, mis on üksteisega liigendiliselt seotud. Seepärast
nimetatakse seda ka liigendäkkeks. Harkjas lüli on ühtlasi tööseadis, mille tööosaks on lüli
alla painutatud ja väänatud harkotsad või lülile kinnituvad pulgad (
noad ). Lüliäke on
peamiselt rohumaa kamara töötlemiseks (samblast
puhastamiseks , mutimullahunnikute
laialiajamiseks), ent kasutatav ka mullaharimisäkkena. Sageli nimetatakse seda ka heina-
või karjamaaäkkeks.
Hariäke (kammäke) ei ole tavaliselt iseseisev masin, vaid kuulub täiendtööseadisena
laukultivaatori (ka reaskultivaatori, reaskülviku ja vedrupiiäkke) komplekti (joonis 5.2).
Selle tööosadeks on pikad vetruvad
piid , mis oma ülaotstega kinnituvad põhimasina
raamiga jäigalt ühendatud põiklatil. Hariäkke piid paiknevad tavaliselt ühes või kahes reas
ning nende ülesanne on murendada kultiveeritud või seemendatud mullapinda ja tasandada
seda.
18. Aktiiväkete tüübid ja ehitus.
Rõhttelje ümber pöörlevate tööseadistega äkkeid nimetatakse rootoräkkeiks, püsttelje
ümber pöörlevaid aga vurräketeks (joonis 5.1). Kõik rootoräkked on vabaaktiivsed. Kui
nende tööseadiste pöörlemistelg on risti masina liikumissihiga, siis töötavad need rullimise
7 põhimõttel ja seepärast nimetatakse niisuguseid rootoräkkeid rulläketes. Rullist erinevad
need oma tööülesannete ja rootori väiksema läbimõõdu poolest. Teatud
erandiks on
sõrmketastest koosnev rootoräke (sõrmketasäke), mille
ketta läbimõõt on suhteliselt suur
(kuni 550 mm). Kui tööseadiste pöörlemistelg on masina liikumissihi suhtes nurgi, siis
töötavad need randaalimise põhimõttel, nihutades mulda ka külgsihis. Niisuguse
rootoräkkena on kujundatud biiteräke ja sõrmketasäkke üks modifikatsioone. Vurräkked on
ketas- ja kahveltüüpi, võnkäkked (võnkuvliikumisega) aga
latt - ja nooktüüpi.
Sõrmketasäke on vabaaktiivne rootoräke, mille tööosaks on rõhttelje ümber pöörlev
sõrmketas (läbimõõduga 35...55 cm). Ühisele teljele paigutatud sõrmkettad moodustavad
patarei. Sõrmketasäke võib olla ehitatud sõrmketasrullina või sõrmketasrandaalina.
Esimesel juhul on sõrmkettad patarei
teljel vabalt pöörlevad, kusjuures ketta
pöörlemistasandi ja masina liikumisigi vaheline nurk on null ning patarei
telg on raamiga
jäigalt ühendatud. Teisel juhul on kettad patarei telje suhtes liikumatud, kusjuures ketta
pöörlemistasandi ja masina liikumissihi vaheline nurk (töönurk) on
muudetav piirides
0...16°. Sõrmketasäkke iseloomulikuks eripäraks on asjaolu, et ketta sõrmed ei ole
radiaalsed (raadiusesihis). Seetõttu sõltub sõrmede mõju mullale sellest, kuidapidi
sõrmkettad masinale paigaldada: kui kettad paigaldada nii, et sõrm hakkab tööle nokana,
siis saadakse mulla hea kobestatus ja umbrohutõrje; vastupidi pöörlemisel
toimivad sõrmed
mulda tihendavalt.
Biiteräke (joonis 5.3) on vabaaktiivne, mille tööseadisteks on nugajatest labadest
kujundatud tähikbiitrid. Seepärast nimetatakse seda äkketüüpi vahel ka
nuga - ehk
tähikäkkeks. Biiteräkke sünnimaaks on Soome, kus seda toodeti juba 20. sajandi algul
firma Hankmo poolt. Sellest tulenevalt on seda nimetatud ka hankmoäkkeks. Soomes on
biiteräke üheks peamiseks
masinaks külvieelsel mullaharimisel ja teraviljatüüstike
künnieelsel töötlemisel, mõnikord ka korduskünni asemel.
Kolmejäljelise (-sektsioonilise) biiteräkke skeemvaade.
Rulläke võib olla nii iseseisev masin kui ka täiendtööseadis lauskultivaatorile (joonis 3.2,
3.7), mullafreesile, biiter- ja vurräkkele (joonis 5.6 ja ) ning reaskülvikule. See kuulub
rootoräkete rühma ja on alati vabaaktiivne (ilma sundajamita). Rulläke võib olla ühe- või
mitmejäljeline ehk sektsiooniline ning ühe- või mitmelüliline. Mitmejäljelisel rulläkkel
liigub mitu äkkerulli üksteise järel (jäljes), mitmelülilisel aga üksteise kõrval või nn
malekorras. Seega võib rulläke olla üheaegselt nii mitmejäljeline kui ka lüliline.
Lauskultivaatori vms mullharimismasina täiendseadeldisena kasutatav rulläke võib täita ka
tugirataste ülesannet, so olla töösügavust piiravaks seadiseks.
Võnkäke on sundaktiivne pulkäke, mille pulgad või pulgaread pannakse traktori
käitusvõlli abil põiksihis (masina liikumissihiga risti) edasi-tagasi võnkuma (joonis 5.9).
Koos masinaedasiliikumisega teeb iga pulk mullakihti sinusoidaalse vaokese, töödeldes
niiviisi mulda igas sihis (joonis 5.10).
8 19. Aktiivseadistega mullaharimismasinate liigitus.
Aktiivseadised liigitatakse pöörlemistelje asendi järgi järgmiselt (joonis 9.1):
a) põiki-rõhtse pöörlemisteljega (
frees ),
b) püstse pöörlemisteljega (sundajamiga vurräke),
c) piki-rõhtse pöörlemisteljega,
d) pööratud pöörlemisteljega (ketasäke, koorel),
e) põiki-kaldu pöörlemisteljega (vabaaktiivne vurräke),
f) piki-kaldu pöörlemisteljega,
g) pööratud-kaldu pöörlemisteljega (ketasader, ketasmuldur).
20. Tüükoorlite ülesanne, agronõuded ja liigitus.
Tüükoorel (koorel) on mulla pindmise harimise masin, mis on ette nähtud
koristatud teraviljapõldude sügiskünnieelseks töötlemiseks, s.o. teraviljatüüstike koorimiseks
sügavusel 6...12 cm. Tüükoorimise eesmärk on muuta mulla füüsikalisi ja bioloogilisi
karakteristikuid veesisalduse suurendamise, mikroorganismide tegevuse soodustamise ja
umbrohutõrje tõhususe tõstmise suunas. See eesmärk on saavutatav järgmiste ülesannete
kaudu:
1) põllu tihenenud pinnakihi pööramine ja kobestamine niiskuse väljaaurumise
takistamiseks ja taimejäänuste lagunemise
soodustamiseks ;
2) mulla pinnakihi kapillaarkanalite lõhkumine niiskuse ülesvoolu takistamiseks ja
sademete mullasse imendumise soodustamiseks;
3) umbrohujuurte ja -võsundite läbilõikamine ja tükeldamine nende arengu pidurdamiseks
ning halvendamiseks;
4) põllupinnale varisenud umbrohuseemnete mullakihiga
katmine nende idanemise ja
tärkamise kiirendamise ning energiavarude ammendamiseks enne sügiskündi.
Peamised agronõuded tüükoorimisel on järgmised:
1)
koorida tuleb õigeaegselt:
hiljemalt 2...3 päeva pärast viljakoristust 12...14 päeva enne
sügiskündi;
2) koorida tuleb ettenähtud sügavusega: pikaealiste umbrohtudega (näiteks võilill,
orashein,
paiseleht , põldohakas jm) risustatud põldu kooritakse sügavusel 8...12 cm,
lühiealiste (näiteks harakalatv, põldrõigas, karuohakas jm) puhul aga sügavusega 6...10
cm;
3) pindmine
mullakiht peab olema hästi kobestatud, sõmerdatud, kõrretüü täielikult maha
lõigatud ja umbrohuseemned mullaga kaetud;
4) kooritud põllu pind peab olema tasane, ilma sügavate vaonditeta ja koondharjadeta;
5) kooritud põllul ei tohi olla vahelejätte ja töötlemata põlluosi.
Koorlid liigitatakse kahe tunnuse alusel järgmiselt:
1) haakimisviisi järgi eristatakse haake-, ripp- ja poolrippkoorleid;
2) tööseadise tüübi järgi on hõlm- ja ketaskoorlid.
21. Hõlmkoorli ehitus ja tööseadised.
Hõlmkoorli ehitus, koostisosad, töö- ja abiosad on
samased hõlmadraga. Hõlmkoorli
tööseadiseks on kultuurhõlmaga ja trapetsteraga silehõlmsahk töölaiusega 25 cm.
Abitööseadiseid (nuga, eelsahk, nurgalõikur) hõlmkoorlil ei ole. Mulla
pindharimismasinate tööorganid peavad jätma taimejäänused mulla ülemistesse kihtidesse,
kus on parimad tingimused lagunemiseks ja huumuse tekkeks. Õhuke
pealmine kiht
säilitab ühest küljest kapillaarsuse ning samas
laseb sademete vm vee läbi mulla
alumistesse
9 kihtidesse. Harimissügavus peaks olema 10...18 cm, mis on optimaalne enamikel juhtudel.
22. Vabaaktiivne vurräke.
Vurräkked on püsttelje ümber pöörlevad aktiiväkked (joonis 5.1). Neid liigitatakse kahe
tunnuse alusel: aktiivtunnuse järgi on vaba- ja sundaktiivseid ning konstruktiivtunnuse
järgi ketas ja kahvelvurräkkeid. Sundajamiga (sundaktiivseid) vurräkkeid on ingliskeelse
terminoloogia eeskujul nimetatud ka mulla püstfreesideks, kuigi reesile omase
laastulõikamisega siin tegemist ei ole.
23. Mullafreesi ülesanne, agronõuded ja liigitus.
Mullafrees on sundaktiivne mullaharimismasin, mille tööseadiseks on sundajami abil
ümber rõhttelje pöörlev ja vetruvate või jäikade tööosadega (nugadega, sõrmedega,
konksudega) varustatud
rootor freestrummel.
Mullafrees on kasutatav mittekivilistel muldadel külvieelsel, künnijärgsel ja künnieelsel
harimisel, samuti reaskultuuride kasvuaegsel hooldamisel (reavahede harimisel) ja põldude
töötlemisel pärast saagikoristust. Vastavalt sellele on mullareesil järgmised ülesanded:
1) mulla intensiivne kobestamine ja segamine külvieelselt;
2) umbrohu hävitamine juurte läbilõikamise ja väljarebimisega, ning umbrohuseemnete
mullaga katmisega;
3) väetiste mullaga segamine;
4) künniviilide ja -mätaste purustamine;
5) rohukamara (söödimaa) purustamine;
6) teravilja-, maisi jms tüüstiku purustamine ja mullaga segamine;
7) põllupinna tasandamine (kühmude mahalõikamise ja lohkude täitmise teel).
Mullafreesi töötamisel kehtivad järgmised olulised agronõuded:
1) töötada tuleb ettenähtud töösügavusega: külvieelsel harimisel kuni 15 cm, mätliku künni
töötlemise kuni 20 cm, kamara purustamisel 5...8 cm, tüüstiku töötlemisel kuni 12 cm;
2) freesida ei tohi liiga kuiva mulda, millega kaasneb tolmustamine;
3) töötada tuleb niisuguse kiirusreziimiga, mille puhul freestrumli tööosade otspunktide
joonkiirus on 3...6 m/s (enamasti on see tagatud masina konstruktiivse kujundusega,
ajami ülekandesuhtega);
4) töötada tuleb vahelejättudeta nii piki- kui põiksihis (haardelaiuses); pikisihiline
vahelejätt on välditud, kui freestrumli tööosade ostpunktide joonkiirus on 2...5 korda
suurem masina töökiirusest (traktori liikumiskiirusest).
Mullafreese liigitatakse mitmete tunnuste alusel:
1) kasutusala järgi on põllu-, soo-, uudismaa-, aia-, metsa-, katmikala-, turba- jm freesid;
2) ühendusviisi järgi traktoriga on ripp- ja poolrippfreesid;
3) freestrumli pöörlemissuuna järgi eristatakse päri- ja vastassuunalisi (pärisuunalisel
pöörleb freestrummel samas suunas
vedava traktori ratastega, tagades ,,mullalaastu"
lõikamise ülalt alla);
4) freestrumli tööosade kujunduse järgi eristatakse nuga-, sõrm- ja konksfreese.
24. Mullafreesi ehitus ja
ajam .
Mullafrees koosneb raamist, riputus- või haakeseadisest, tugiratastest või suuskadest (-
jalastest), freestrumlist ja ülekandemehhanismidest selle pöörlemiseks. Poolrippfreesi
tugiratasteks on raami suhtes pööratavad kanderattad. Töösügavust muudetakse rataste või
suuskade asendi muutmisega raami suhtes.
10 Mullafreesi tööseadis on masina liikumissihiga risti paiknev rõhtne freestrummel, mis
koosneb võllist ja sellele jäigalt või vedrustatult kinnitatud tööosadest. Tööosadeks võivad
olla sirged või külgsihis painutatud kõverad noad, aga ka sirged või konksjad pulgad ehk
sõrmed (joonis 4.3). Nugatrumliga mullafreesi nimetatakse nugafreesiks, sõrmtrumliga aga
sõrmfreesriks.
Mullafreesi oluliseks koostisosaks on ajam ja ülekandemehhanismid, ms traktori
käitusvõlli pöörlemise muudavad freestrumli pöörlemiseks. Seejuures võib ülekanne
freestrumlile toimuda kas selle võlli keskkohalt (keskajamiga) või ühest otsast (ots- ehk
külgajamiga). Teisena nimetatud võimalus on praktikas rohkem levinud, sest sel juhul ei
jää ülekandeelemendid (
hammasratas - või kettülekanne) freestrumli tööpiirkonda.
Mõlemal juhul paikneb freestrumli keskkoha kohal hammasratasreduktor või
õlekandesuhte muutmist võimaldav käigukast (
kiiruskast ).
25. Põllurullide ülesanne, agronõuded ja liigitus.
Rulliks nimetatakse mullatasandusriista, mis töötab pinnakonaruste maha- ja
kokkusurumise põhimõttel. Rulli ülesandeks on tihendada mulda, purustada mullapanku ja
silendada põllu pinda. Konarliku (ribilise, rihvelja) tööpinnaga rulli on veel täiendav
ülesanne muuta
pealiskiht kobedaks, niiskuse väljaauramist taksitavaks. Rullimist
kasutatakse nii külvieelselt kui ka külvijärgselt (tagamaks seemnete parema kontakti
mullaga), aga ka taimede kasvuaegse hooldamise võttena (taliviljaoraste ja
põldheinapõldude külmakergete kõrvaldamiseks).
Peamised agronõuded rullimisel on:
1) rullida tuleb sobiva niiskusega mulda (liiga niiske mulla korral kleepub muld rulli
tööpinnale);
2) rullimiseks tuleb kasutada sobiva raskuse ja tööpinnaga rulle; külvieelselt tuleb kasutada
kiilja tööpinnaga rulle, külvijärgselt rihvelja tööpinnaga rulli, taliorasel silerulli;
3) rullitud põllul peab muld olema ühtlaselt tihendatud nõutud sügavuses;
4) rullitud põllul ei tohi olla mullapanku läbimõõduga üle 5 cm;
5) rullitud põllul ei tohi olla vahelejätte ja rullimata põlluosi.
Põllunduses kasutatavaid rulle liigitatakse peamiselt kolme tunnuse alusel:
1) haakimisviisi järgi eristatakse haake-, ripp- ja poolripprulle;
2) kasutusala järgi on põllu- ja soorullid;
3) üldehituse järgi on
silinder - (terviksilinder-) ja rõngasrullid (rõngastest koosnevad).
Silinderrulle liigitatakse veel tööpinna (veerepinna) kujunduse järgi:
- silerullid (joonis 6.1),
-
ribi - ehk soorullid,
11 - okas- ehk ogarullid (joonis 3.2).
Rõngasrullidel tuleneb tööpinna kujundus rõnga
kujust , mistõttu eristatakse järgmisi
tüüpe:
- rihvkiilrõngasrullid (joonis 6.2),
- krihvrüngasrullid (joonis 6.3),
- ketasrõngasrullid (joonis 6.4),
- kiilrõngasrullid (joonis 6.6),
-
rehv - ehk ratasrõngasrullid (joonis 6.12).
Rullide eritüübiks on keerdvarb- ehk spiraalvarbrull.
26. Rullide tehnilised ja
tehnoloogilised iseärasused.
Silinderrull on
metall - või betoonsilinder, mille telje
otsad toetuvad raamile kinnitatud
laagritele. Betoonrull on betoonist valatud ja kasutatav raske soorullina. Enamkasutatav
silinderrull on metallist seest tühi kinnine silinder, mille ühes otsas paikneb
kork rullisse
vee lisamiseks selle raskuse suurendamise eesmärgil (joonis 6.1). Kui silinderrulli tööpind
(veerepind) on sile, siis on tegu silerulliga. Kui aga silerulli tööpinnale kinnitada pikilatid
või silindripinnaga risti asetsevad pulgad, siis saame vastavalt ribi- või soorulli ja okasrulli.
Kergemad ja väiksema läbimõõduga silinderrullid on nn põllurullid, raskemad ja suurema
läbimõõduga aga soorullid.
Rõngasrull koosneb üksikutest rõngastest (läbimõõduga 300...550 mm), mis ühisele
teljele paigutatuna moodustavad rullilüli ehk rõngapatarei. Rõngad võivad olla telje ümber
või koos teljega pöörlevad. Tööpinna (veerepinna) kujult võivad rõngad olla väga
mitmesugused. Vastavalt sellele eristatakse kiil-, hammas- ehk tähik-, rihv- jms rõngasrulle
(joonis 6.2...6.11). Rõngasrulli lüli ehk patarei võib kujundada ka erikujulistest rõngastest,
paigaldades need
vaheldumisi . Üheks niisuguseks on rihvkiilrõngasrull (joonis 6.2), mille
kiiljad ja hammastatud servadega nn rihvrõngad paiknevad vaheldumisi. Seda maailmas
laialt levinud rullitüüpi nimetatakse ka
cambridge -rulliks. Sama laia
levikuga on
krihvrõngasrull, mis koosneb külgkrihvidega varustatud välisservaga rõngastest (joonis
6.3) ja mida nimetatakse ka crosskillrulliks. Niisugune rõngasrull sobib põllu külvijärgseks
rullimiseks, sest ühteaegu mulla tihendamisega kergitavad rõnga külgkrihvid mulda ühes ja
jätavad pinnale niiskuse aurumist takistava kihi, mis väldib kapillaarvee kerkimist pinnale.
Kui
kitsad rõngad paigaldada teljele hõredalt (põikivahega), siis toimib niisugune rull
mulla aluskihte tihendavalt (,,pakkivalt"). Seda nimetatakse ketasrõngasrulliks, saksa
keelest tulenevalt ka pakkeriks, inglise keelses kirjanduses ka campbell-rulliks (joonis 6.4).
Ketasrõngasrulli eriliik on keerdvarb- ehk
spiraal (varb)rull, mis tekitab rullitavale
kihile põiksihilise nihke.
Rõngasrulli üheks liigiks on kiilrõngasrull (joonised 6.6...6.8), mis toimib analoogselt
ketasrõngasrulliga (pakkeriga). Soonrull töötab analoogselt kiilrõngasrulliga, kuid seda
kasutatakse kergematel muldadel (joonised 6.9 ja 6.10).
12 27. Kobestid.
Kobesti on mullaharimise masin, mis peab täitma kas künnikihi või künnialuse kihi
kobestamise ja õhutamise ülesandeid. Seega on kobestamise eesmärgiks mulla tallamise
tulemusena tihkunud künnialune mullakiht
kultuurtaimede kasvuks ja arenguks soodsaks
muuta. Sellest tulenevalt on kobestamise kõige üldisemaks agronõudeks künnikihi või
aluskihi töötlemine nii pindalas kui ka sügavuses. See üldnõue on täpsustatav järgmiste
üksiknõuetega:
1) kobestada tuleb vastavalt vajadusele;
2) kobestada tuleb nõutud sügavusega;
3) kobestatud põllu kõnnikiht või aluskiht peab olema hästi kobestatud;
4) kobestamine peab toimuma ilma niiskete ja märgade aluskihiklompide pinnale
toomiseta;
5) kobestatud põllu pind peab olema tasane, ilma vaonditeta ja vallideta.
Kobesteid liigitatakse mitmete tunnuste järgi järgmiselt:
1) põhiülesande järgi: aluskihi- (sügav-) ja künnikihikobestid;
- aluskihikobestid liigituvad kihvkobestiteks (sügavkobestid) ja käppkobestiteks
(tõngurid, tüükultivaatorid);
- künnikihikobestid liigituvad ketaskobestiteks (raskerandaalid) ja rootorkobestiteks
(freeskobestid);
2) haakimisviisi järgi: haake-, ripp- ja poolrippkobestid;
3) tööprotsessi iseloomu järgi: vibraatorita ja vibraatoriga;
- vibraatoriga kobestid võivad olla mehaanilise, hüdro-, pneumo-, elektro- või
segasüsteemvibraatoriga;
4) komplekteerituse järgi lisaseadistega: kivikaitsmeta ja kivikaitsmega;
5) tööseadise liigi järgi: käpp-,
kihv -, ketas-,
vurr - ja frees.
Sügavkobesti ei tõsta mulla alumisi kihte üles ning tänu sellele ei rikuta ka mulla
struktuuri. Samuti ei too sügavkobesti välja kive. Kobesti kergitab mulda ainult pisut,
millega
paraneb oluliselt vee liikumine mullas (joonis 8.2). Rippmasinaks kujundatud
sügavkobestit (joonis 8.3) on võimalik kasutada koos rippkülvikuga. Mulla pealiskiht jääb
tasane ja ei sega järgnevate masinate tööd.
Aluskihikultivaatorite tööseadiste asetustihedus on niisugune, et tagataks mulla hea
läbitöötatus
nende töösügavusel 15...30 cm (joonis 8.5). Kobestuskultivaatoril on võimalik kasutada
erinevat tüüpi tööseadiseid (joonis 8.4).
Joonis 8.4. Kobestuskultivaatori tööseadised.
28. Libistid ja silurid.
Libisti on kõige lihtsam ja enam kasutatavam mullapinna tasandamise
riist , mis koosneb
mööda põllu pinda lohistatavatest tööseadistest. Libisti iseloomulikuks tunnuseks on
13 töösügavust piiravate seadiste (näit. tugirataste) puudumine. Töösügavuse tagab libisti
mass, mida mõnel
mudelil saab suurendada lisalastiga. Seega töötab libisti pinnakonaruste
mahahõõrumise ja -lükkamise ning ümberpaigutamise põhimõttel. Libisti ülesanded on:
1) põllupinna tasandamine (tasasemaks muutmine), taastamine (tasaseks tegemine),
silendamine, silestamine;
2) mullapankade purukshõõrumine;
3) mullakooriku purustamine;
4) põllupinna mikroplaneerimine;
5) mulla pinnakihi pudendamine koos tärganud umbrohutõumete hävitamisega.
Libistamine (taastamine, silumine) toimub künnijärgselt, tavaliselt esimese
mullaharimisvõttena kevadel, mil põhieesmärgiks on mullast niiskuse väljaauramise
tõkestamine. Tihti rakendatakse seda ka koos teiste mullaharimistöödega (kündmine,
kultiveerimine , äestamine,
rullimine ). Libistit võib kasutada ka rohumaade hooldusriistana
mutimullahunnikute ja loomade väljaheidete laialivedamiseks ning kamara tasandamiseks.
Eriti häid tulemusi annab libistamine kergema lõimisega muldadel, säilitades paremini
mullastruktuuri ja tolmustades vähem kui äestamisel.
Agronõuded libistamisel seisnevad töö tegemise õigeaegsuses (libistiga võib töötada
niiskemal mullal kui äkkega), mullapankade purustatuses, mulla murendatuses ja
pinnatasasuse ühtluses.
Libisti purustab mullapanku paremini kui silerull, mis
surub kuivanud
pangad mullasse.
Tööseadise kujunduse järgi eristatakse pruss-, plaat-, raam- (kast-), kett- ja rõngaslibisteid.
Kõikide nende ühiselemendiks on esipruss.
Silur on libistiga sarnane, ent töötab pinnakonaruste mahalõikamise (hööveldamise)
põhimõttel. Sellest tulenevalt on siluril töösügavust piiravad
seadised (tugirattad) ja
tööseadiseks on lõiketeraga varustatud pruss või plaat, mille
kaldenurk maapinna suhtes on
muudetav. Silurina töötab ka kultivaatori, äkke käppade või rulli vms ees või järel.
Iseseisva masinana kasutatav silur (tasandur) on agromelioratsioonimasin
(põlluparandusmasin).
29. Külviviisid ja agronõuded külvile.
Põllupinnaühikule külvatav seemnekogus peab olema selline, mis tagab võrsete optimaalse
tiheduse. Erinevate kultuuride ja sortide puhul on see kogus erinev. Näiteks tuleb
talinisu produktiivvõrsete optimaalse tiheduse saamiseks külvata (olenevalt sordist)
300...700 tera m2-le.
14 Joonis 5.1. Külviviiside
skeemid : a reas., b
lint -, c pesas-, d ruutpesas- (-pesiti), e laus- (hajus-), f punktiirkülv (üksikterakülv).
Peamised külviviisid on reas- ja lauskülv. Reaskülvi puhul külvatakse seemned ridadesse,
lauskülv on ilma ridadeta külv. Reaskülvi iseloomustab eelkõige
reavahe (joonis 5.1), mis
on naaberridade kesktelgede vaheline kaugus ja mille alusel saab esitada järgmisi
reaskülviviise:
1) kitsarealine külv reavahe kuni 9 cm;
2) tavaline reaskülv reavahe 9...15 cm;
3) laiarealine külv reavahe üle 15 cm;
4) lintkülv kaks või enam rida moodustavad lindi, kusjuures lintide
vahekaugus on
suurem ridade vahekaugusest lindis;
5) ribaskülv seemned külvatakse ribadena, mille laius on mitte alla 9 cm;
6) teriti- e punktiirkülv seemned külvatakse
ritta ühekaupa, kusjuures kõikide seemnete
vahekaugus reas on võrdne; seda reaskülviviisi nimetatakse ka täppis- e
üksikterakülviks;
7) pesas- e peasitikülv seemned külvatakse pesadena (mitu seemet ligistikku),
kusjuures kõikide pesade vahekaugus reas on võrdne;
8) ruutkülv (ruutpunktiirkülv) külvatud seemned paiknevad ruudu nurkades ühekaupa;
9) ruutpesas- e ruutpesitikülv külvatud seemnepesad paiknevad ruudu nurkades.
Peamised agronõuded seemnekülvil on järgmised:
1) külvata tuleb õigeaegselt (võimalikult vara, kuid mitte varem, kui muld seda
võimaldab) ja lühikese
ajaga (7...10 päeva jooksul);
2) külvata tuleb ühtlase külvisenormiga (teraviljadel 200...300 kg/ha ehk 400...600 tera
ruutmeetri kohta) nii üksikridades kui ka kogu põllul;
normist kõrvalekalle ei tohi
ületada ± 3%;
3) seemned tuleb külvata ühesugusele sügavusele (taliteraviljadel 2...4 cm,
suviteraviljadel 3...6 cm, hernel 4...6 cm ja heinaseemnel 2...3 cm, kusjuures
raskematel ja niiskematel muldadel ning hilisemal külvil on külvisügavus väiksem kui
kergematel ja kuivematel muldadel ning varajasel külvil); keskminekülvisügavus ei
15 tohi ettenähtust erineda üle ± 15%;
4) reaskülviread peavad olema sirged ja ühesuguste reavahedega: reavahede hälbed ei
tohi põhiridadel ületada ± 1 cm ja puuteridadel ± 2 cm;
5) külvamisel ei tohi esineda vahelejätte ega ülekülvi, tekkinud tühikud tuleb kohe täis
külvata;
6) seemendatud põllu pind peab olema tasane.
30. Külvikute liigitus.
Seemnekülvikud liigitatakse mitmete tunnuste alusel järgmiselt: · otstarbe järgi:
universaalsed e üldotstarbelised, eriotstarbelised ja põimkülvikud e · mitmeoperatsioonilised; · külviviisi järgi:
tavalised reaskülvikud, kitsarealised, lint-, ribas-, punktiir-, peenar-, · pesiti- ja lauskülvikud; · haakimisviisi järgi: ripp-(ees-, kesk-, külg-, taga-) ja poolrippkülvikud; · peamise külviorgani (külviseadme) tüübi järgi: mehaanilised ja pneumokülvikud; · raami kujunduse järgi: üksik-, liit- ja sektsioonkülvikud; · seemendi tüübi järgi: ketas- ja sahkseemenditega külvikud.
31. Reaskülvikute ehitus ja tööorganid (kas on vaja organite täpseidkirjeldus).
Külviku koostisosad on raam, veermik, haake- või riputusseade, tööorganid, ajam,
reguleerseadised, märgisti ning
lisaseadmed (pindalamõõtur, külvise tasemenäitur, ratta
jäljekobesti jms).
Külvikute raame liigitatakse ehituse järgi jäik- ja liigendraamideks. Jäikraam on tavaliselt
terviklik keeviskonstruktsioon. Liigendraamid on laiahaardelistel külvikutel ning need
liigituvad rõht- ja püsttelgliigendilisteks. Rõhtliigendraamiga külviku külgsektsioonid
tõstetakse masina teisaldusasendisse seadmisel üles (joonis 5.3). Selline raam on tavaliselt
pneumokülvikutel. Püstliigendraamiga külvikutel külgsektsioonid pööratakse
teisaldusasendiks kesksektsiooni ette kolmesektsioonilistel külvikutel ja teineteise vastu
kahesektsiooniliste puhul.
Külviku tööorganid on külvisekast e
punker , külviseade, seemendid, seemnete
katmise seadmed , põimkülvikul veel ka väetusseadmed ja mullaharimisorganid või -
moodul .
32. Külvikute töövalmendus ja külvamise tehnoloogia.
Töövalmendus (tööks ettevalmistamine, töökorda
seadmine ) hõlmab järgmisi toiminguid:
1) kontrollida külviku komplekteeritust kõikide osade, detailide ja seadistega ning
vajaduse korral lisada puuduvad osad;
2) kontrollida külviku tehnilist seisukorda: eeskätt tööosade ja reguleerseadiste
korrasolekut, poltliidete pingutatust, laagrite määritust, lekete puudumist
hüdrosüsteemis, õhurõhku rehvides;
3) seatakse külvik nõutud külvisenormile ja seemendid ettenähtud külvisügavusele.
Külvikute seadmine külvisenormile toimub soonrulli tööpikkuse ja annustivõlli
pöörlemissageduse uutmisega (joonis 5.23), põhjaklapi ja
siibri asendi valikuga.
Ülekandesuhe soovitatakse valida selline, et soonrulli pöörlemissagedus oleks võimalikult
väike ja seejuures kasutatav soonrullide tööosa pikkus võimalikult suur. See tagab parema
külviühtluse. Kui külviannusti on seatud nõutud külvisenormile, täidetakse külvisekast
seemnetega (joonis5.24) ja alustatakse tööd.
16 33. Kartulipanurite ülesanne ja agronõuded.
Kartuliviljeluse viisid võib jagada kaheks: vaguviljelus (joonis 5.29) ja peenarviljelus
(joonis 5.30) ning kartuli panekuviisid samuti kaheks: reaspanek ja ribasreaspanek.
Kartulipanur peab täitma järgmisi ülesandeid:
1)
vagude kujundamine;
2) mineraalväetise
vakku andmine;
3)
mugulate vakku asetamine;
4) mugulate mullaga katmine. Joonis 5.29. Mahapanekuskeem (vaguviljelus).
Peamised agronõuded kartulipaneku kohta on järgmised:
1) põllu valik: eelviljana eelistada teravilju, sügavajuurelisi kultuure, ristikut, kõrrelisi
heintaimi; kui
kartul järgneb kartulile, võib saak olla 10...60% väiksem kui
külvikorras; sobivad kerge lõimisega, õhurikkad,
saviliiv -
liivsavi mullad (mulla
tihedus 1,1...1.2 g/cm3): · kerged liivmullad
hilised sordid , samuti varased; · saviliiv, liivsavi keskvalmivad ja hilisepoolsed sordid; · raske lõimisega mullad keskvalmivad ja keskvarajased sordid;
2) kartul tuleb maha panna õigeaegselt: kui muld on soojenenud mahapaneku sügavuses
(10...12 cm) 7...10 °C (külma mulda soojad
mugulad muguldumise oht);
3) seemnemugula suurus (
mugula pikkus): piklik ja piklikovaalsel mugulal 29...55 cm,
ümaratel ja ümarovaalsetel 20...60 mm;
4) vaod peavad olema sirged ja ühesuguste vahedega; ühe töökäigu reavahede lubatud
kõrvalekalle ei tohi ületada ± 2 cm, eri töökäikudel (puuteridadel) ± 10 cm;
5) mahapanekusügavus ei tohi ettenähtust erineda üle ± 2 cm; mahapanekusügavus
(joon 5.10) on raskema ja keskmise lõimisega muldadel 5...8 cm, kerge lõimisega
muldadel 10...12 cm;
6) mugulad tuleb maha panna ettenähtud tihedusega nii üksikridades kui ka tervel põllul:
mugulanorm on 45000...
70000 mugulat hektari kohta (2,5...5,0 t/ha).
34. Kartulipanurite ehitus ja tööorganid.
Kartulipanuri koostisosad on raam, veermik, haake- või riputusseade, tööorganid,
reguleerseadised, väetus- ja automaatikaseadmed, ülekanne ning märgisti. Tööorganiteks
on mugulapunker, mugulaannusti (-dosaator), seemendi ja mugulaid mullaga katvat
organid (vaosulgur, harjamoodusti).
Mugulapunker on kaldse põhjaga kast. Mugulate vool kolusse peab olema pidev ja ühtlane,
sest ainult siis suudab annusti (panekuseade) mugulaid normaalselt haarata. Punkri põhjaks
võib olla
lintkonveier .
Elevaatortüüpi annusti (joonis 5.35 ja 5.36) koosneb lõputust lindist, mille külge on
kinnitatud metall- või
plast -lusikad (
kausid , kopad). Need paiknevad lindil kahes reas
17 malekorras. Elevaatorid asuvad punkri esiseinas ning selle
esiosa (allaliikuv haru) on
kaetud
kattega .
Elevaator on varustatud vibraatoriga, mis raputab üleliigsed mugulad tagasi
kolusse ja väldib mitme mugula sattumist ühele lusikale.
Seemendi ülesandeks on moodustada
vagu , tagades niiviisi mugulate ühtlase
mahapanekusügavuse. Seemendiks on tavaliselt nürinurkne (115...155°) või
teravnurkne (40°) kiiljas sahkseemendi. Selle
kere külge on kinnitatud väikesed hõlmad, mis
moodustavad väetise ja mugulate vahele mullakihi. Seemendi esiosas on toendi külge
kinnitatud kopeerratas. Sama toendiga on ühendatud liigendnelilülik, mille abil seemendi
on kinnitatud raami esiprussi külge.
Harjamoodustitena e vaosulguritena kasutatakse tavalist sfäärilisi kettaid (joonis 5.39),
mis katavad mugulad mullaga (sulgevad vao ja moodustavad harja). Iga mugularea kohta
on kaks
ketast , mis on laagerdatud kaldsetele pooltelgedele. Mõnedel
masinatel kasutatakse vagude kinniajamiseks ka sahku (joonis 5.38).
35. Teravilja koristamise viisid ja agrotehnilised nõuded.
Teravilja koristamise viisid on järgmised:
1) kahefaasiline ehk lahuskoristamine. Lahuskoristamine on niisugune, kus koristamise
mõlemad põhietapid vilja
niitmine ja terade väljapeksmine viiakse läbi ajaliselt kahel
erineval perioodil.
2) ühefaasiline ehk otsekoristamine. Teravilja otsekoristamine seisneb
kombineeritud masina teraviljakombaini kasutamises, kusjuures üheaegselt niitmisega toimub terade
väljapeksmine, terasegu esmane puhastamine ning aganate ja põhu kogumine või
hekseldamine.
Agrotehnilised nõuded teravilja
koristamisel on järgmised:
1) valida agrotehniliselt õige aeg (sobivaimaks koristusajaks loetakse terade vahaküpsuse
staadiumi lõpp ja täisküpsuse algus);
2) vältida terade kadu;
3) vältida terade purustamist;
4)
koristada põld täielikult, jätmata põlluribasid ja -nurki koristamata.
36. Teraviljakombaini liigitus, koostud, tööprotsess.
Teraviljakombainide liigitamise üldtunnuseks on:
1) seos jõumasinaga, mille järgi eristatakse haake-, ripp-, poolripp- ja liikurkombaine;
2) kontuurskeemi järgi eristatakse L- ja T-kujulisi; esimene on heedri külgmise asetusega
(haake- ja poolrippkombainid), teine aga heedri eesmise (laup, frontaal) asetusega
(ripp- ja liikurkombainid);
3) lõike- ja peksuseadme töölaiuste vahekorra järgi on
ahenev - ja otsevoolukombainid.
Teraviljakombain koosneb järgmistest tehnoloogilistest koostudest ja nende
tööorganitest:
1) heeder (lõikusmasin):
haspel , lõikeseade ja edastusseadmed (kaksiktigu,
sõrmmehhanism,
kaldkonveier);
2) peksuseade (peksumasin): peksutrummel, peksukorv, söötebiiter;
3)
puhasti (puhastusmasin): põhupuistur, sari, sõelad, ventilaator ja edastusseadmed
(teratigu, viljapeateod, viljapeaelevaator, põhubiiter);
4) terakogur: teraelevaator, terapunker, terajaotustigu, punkritühjendustigu
(teraväljamistigu);
5) põhukogur: põhutihendur (-pakkur, -
tamp ), aganatihendur, põhupunker (või -press või
18 -hekseldi, või -vaaluti).
37. Heedri üldehitus ja seadistamine.
Heeder koosneb kahest iseseisvast osast:
1) lõikeseadme kerest (platvormist) ja
2) kaldkambrist.
Kaldkamber on liigendiliselt kinnitatud kombaini kere raamile ja
toetub alt kahele/kolmele
hüdrosilindrile.
Lõikeseadme kere on kaldkambriga ühendatud kolmes või neljas punktis: keskelt sfäärilise
liigendiga või paikneb kahel käpal ja kahel pool kaldkambrit liigendripatsiga, mis on
19 ühendatud heedri tasakaalustusvedruga, Selline
kinnitus võimaldab lõikeseadme kerel
kopeerida põllupinna ebatasasusi nii piki- kui põikisihis. Heedri (joonis 8.2 ja 8.3)
põhikoostudeks on kere (platvorm), põllujaoti, haspel, lõikeseade, kaksiktigu, kaldkonveier
ja tasakaalustusseade.
38. Haspel ja selle seadistamine.
Terakadude vähendamiseks heedril on asetatud heedrile lõikeseadme kohale haspel. Haspli
ülesandeks on suunata lõigatavad kõrred lõikeaparaadi ette. Haspel kujutav endast
labadega varustatud trumlitaolist pöörlevat tööorganit. Hasplite liigitamise aluseks on
nende
konstruktsioon , kusjuures määrav tähtsus on haspli töötavate elementide,
labade või
rehikute, ehitusel, kinnitusel ja asetusel. Vastavalt sellele eristatakse haspli järgmisi tüüpe:
1) radiaalsete labadega ja
2) kaldlabadega: a) jäiga kinnitusega, b) liigendilise kinnitusega
Haspli tööreziimi parameetriteks on pöörlemiskiirus ning asetus lõikeseadme suhtes nii
püstkui ka rõhtsihis. Kõik need peavad olema reguleeritavad vastavalt töötingimustele.
Seejuures peab haspli pöörlemiskiirus olema sünkroonis kombaini edasiliikumise
kiirusega. Haspli pöörlemissagedust muudetakse hüdrauliliselt juhitava variaatoriga.
Haspli pöörlemissagedus valitakse selline, et labade joonkiirus ületaks 1,2...2,0 korda
kombaini edasiliikumise kiiruse. Kombaini aeglasel liikumiskiirusel peaks see olema
1,7...2,0,
kiirema liikumiskiiruse korral 1,2...1,5. Sellise reguleerimise
kasutamisel annavad haspli
labad kõrsi lõikeseadmele hästi ette,
toetavad neid lõikehetkel ja lükkavad
lõigatud kõrred edasi kaksikteole. Kui haspli pöörlemissagedus on liiga suur, hakkavad
haspli labad peadest
teri välja
peksma . Kui aga haspli pöörlemissagedus on liiga väike, ei
anta kõrsi küllalt aktiivselt lõikeseadmele ette, mistõttu osa kõrsi võib jääda lõikamata ja
osa lõigatud kõrsi
variseb põllule. Seega suurendab haspli ebaõige pöörlemissagedus
märgatavalt koristuskadusid.
39. Teraviljakombaini lõikeseade ja selle seadistamine.
Lõikeseadme üldehitus ja tööpõhimõte on samasugused nagu niidukitel. Põhikoostudeks
on
vikat ja sõrmlatt (joonis 8.8). Sõrmlatiks on heedri platvormi esiservale kinnitatud
nurkterasest pruss, mille külge kinnituvad sõrmed (joonis 8.9). Et lõikeseade töötaks
häireteta ja kvaliteetselt, on tarvilik, et kõik detailid oleksid
terved ja korralikult kinnitatud,
detailide vahelised lõtkud normide piirides ning vikat liiguks vabalt sõrmedes ja
suunurites.
40. Teraviljakombaini kaksiktigu ja selle seadistamine.
Kaksiktigu on lõikeseadme poolt lõigatud vilja suunamiseks heedri keskele ja selle
etteandmiseks kaldkonveierile. Kaksiktigu koosneb parem- ja vasakpoolsest teost ning
sõrmmehhanismist (joonis 8.13). Tigu kujutab endast toru, millele on kruvijooneliselt
20 keevitatud teraslint. Vasak-poolsel teol on parempoolne, parempoolsel aga vasakpoolne
keere. Teo võlli otsas on kaitse-hõõrdsidur, mille kaudu käitatakse kaksiktigu.
Sõrmmehhanismi telg on teo pöörlemistsentrist välja
viidud nii, et sõrmed väljuvad teo
esiküljel, kus telg on kestale kõike lähemal, täielikult, vastasküljel aga osaliselt. Seetõttu
haaravad sõrmed eespoolses asendis vilja, annavad selle ette kaldkonveierile ja tõmbuvad
järk-järgult kesta tagasi.
Joonis 8.13. Vaade kaksikteole.
41. Peksuseadme ehitus ja seadistamine.
Peksuseadme ülesandeks on terade eraldamine viljatähast, mis toimub kahe tööorgani,
trumli ja peksukorvi, koostöö tulemusena. Peksuseadmed liigitatakse järgmiselt:
1) peksuseadme paigutuse järgi (joonis 8.15 ja 8.16): · tangentsiaaltrummel (põikpeksuseadisega) ja · aksiaaltrummel (pikipeksuseadisega);
2) trumlite arvu järgi: 1, 2, 3, ...peksutrumliga (seadisega):
Et kombainiga koristatavate kultuuride seemned erinevad nii mõõtmete kui ka
füüsikalismehaanikaliste omaduste poolest, tuleb nende koristamisel kasutada peksutrumli
erinevaid pöörlemissagedusi.
Trummel käitatakse peavaheajami võllilt
kiilrihmvariaatoriga, mis võimaldab trumli pöörlemissagedust muuta.
42. Teraviljakombaini puhasti ja selle seadistamine.
Klassikaline puhastussüsteem koosneb edastuslauast, varbrestist, ülemisest riba- ehk
21 zalusiisõelast, ülemise sõela pikendist ja alumisest ribasõelast, mis kokku moodustavad
sarja , ning tuulekilbist ja ventilaatorist (joonis 8.29).
Puhastussüsteemi töös kõige suurem tähtsus ventilaatori ja ribasõelte õigel häälestamisel
(joonis 8.31). Kogu reguleerimistsükli eesmärgiks on saavutada võimalikult puhtad
terad terapunkris ja antud tingimuste korral puhasti võimalikult suurem läbilaskevõime.
Lähtudes eelöeldust, seatakse ventilaatori õhuvoolu tugevus võimalikult suureks, sest mida
tugevam on õhuvool, seda rohkem eraldatakse kergeid lisandeid. Õhuvoolu liigne tugevus
soodustab terade sattumist aganatesse. Ventilaatori õhuvoolu tugevust muudetakse kas
kiilrihmvariaatoriga, mis muudab ventilaatori tiiviku pöörlemissagedust, või ventilaatori
sisselaskeavade suuruse muutmisega siibrite abil.
Kombaini külgkalde puhul on puhasti normaalse tööreziimi kindlustamiseks kolm
võimalust:
1) sarja hoidmine rõhtses asendis (joonis 8.32);
2) kombaini hoidmine püstasendis, v.a heeder (kombaini nn mägivariant, muudetud
käiguosa);
3) sõeltele külgkaldega vastassuunalise võnkumise andmine (3-D-
külgkaldekompensaator).
43. Teraviljakombaini punker, elevaatorid, teod.
Kõikidel kombainidel kasutatakse kinniseid punkreid (joonis 8.35). Terad tuuakse
punkrisse elevaatoriga, mistõttu punkri täitumine ei toimu ühtlaselt. Terade
edasitoimetamiseks ja kogu punkri täielikuks täitmiseks on punkri ülaossa paigutatud
jaotustigu. Punkri sellesse
ossa , mis täitub viimasena, on pandud elektriline signalisaator,
mis annab märku punkri täitumisest. Punker võib olla ühe või kaheosaline.
Elevaatorid ja teod Terade: edastamiseks puhastist terapunkrisse ja peksmata viljapeade
toimetamiseks puhastist tagasi peksuseadmesse kasutatakse tigusid ja kraapelevaatoreid.
Tigude ülekoormuse ärahoidmiseks on need varustatud kaitsesiduritega.
44. Teraviljakombaini ajam.
45. Teraviljakombaini hüdrosüsteem.
46. Kartuli- ja peedipealselõikurid.
Pealsete eraldamine kuulub nii kartuli kui ka juurviljade koristamise tööoperatsioonide
hulka. Kartulipealsed tuleb eraldada tootmispõllul 5...7 päeva enne mugulate koristamise
algust, seemnepõllul 10...12 päeva. See kiirendab kartuli täielikku füsioloogilist
valmimist, koore kinnistumist. Väheneb mugulate vigastumine koristamisel ja tõuseb
nende haiguskindlus. Peale selle suureneb kartulikombaini läbilaskevõime ummistuste
vähenemise ja mugulasegu sõelumistingimuste
paranemise tõttu. Kartulipealsete
22 eraldamise viisid jagunevad
mehaanilisteks , keemilisteks ja füüsikalisteks (termilisteks
jms).
Peedipealsed võib lõikur eraldada ühe-või mitmeastmeliselt. Üheastmelise eraldamise
puhul lõigatakse
pealsed lõplikult ühe madala lõikega. Kaheastmelise eraldamise korral
tehakse esimene lõige
peedi päid kopeerimata. Teise lõike tegemisel juhib lõikenuga
kopeermehhanism. Pealsete lõikamisele järgneb tavaliselt veel
juurika ülemise osa
täiendav puhastamine pealsejäänustest.
Pealselõikuri peamiseks agronõudeks on ettenähtud lõikekõrguse tagamine. Selle nõude
täitmine võimaldab vältida saagi kvantitatiivset ja kvalitatiivset kadu.
47. Kartuli omadused ja kartuli koristamise viisid.
Mehhaniseeritud tootmise seisukohalt on kartul tülikas kultuur. Masinate tööorganitelt
saadavate löökide mõjul vigastuvad kartulimugulad kergesti, mis vähendab nende
kaubanduslikku väärtust, loob eeldused
haigestumiseks ja halvendab säilivust. Seetõttu
peaksid kõik kartulimugulatega kokku puutuvad tehnoloogilised liinid ja nende tööorganid
olema mugulasõbralikud, st ei tohi mugulaid tööprotsessis vigastada. Kuna
mugulates on
kuivainet keskmiselt 22% ja vett 78%, mugulad ise aga on erineva kujuga ja eri suurused,
siis on seda eesmärki üsna raske saavutada. Seadmete ja
tehnoloogiliste liinide tööd
komplitseerivad mitmesugused kartuli hulgas olevad lisandid, mille omadused ja kogus
kõiguvad suurtes piirides, samuti raskema lõimisega muld, mis kleepub mugulate ja
masinate tööorganite külge. Mõned lisanditeliigid (mullakamakad jt) on mugulatega
sarnased ja seetõttu vajatakse nende eraldamiseks keerukamaid seadmeid. Lisandeid ja
kartulit koos nimetatakse mugulaseguks.
Sisaldab saagikoristus järgmisi tööoperatsioone: vao
avamine või mugulate üleskaevamine
koos mullakihiga, mulla sõelumine,
lisandite (umbrohu, pealsetükkide, kivide jms)
eraldamine, mugulate kogumine ja
laadimine veokile. Enne mugulate koristamise algust
eemaldatakse pealsed. Koristus lõpetatakse ajaks, mil mulla temperatuur langeb alla 10 °C.
Koristusviisidena kasutatakse otse-, lahus- ja segakoristust.
Otsekoristuse puhul toimuvad kõik koristusoperatsioonid üheetapiliselt vahetus
järgnevuses (vt
jaotis 10.3). Lahuskoristust iseloomustab koristusoperatsioonide
kulgemine kaheetapiliselt
Kasutatakse kahte
varianti :
1) esimene töökäik võtturiga tuuakse mugulad mulla seest põllu pinnale ja teine
töökäik mugulad korjatakse põllult üles käsitsi;
2) esimene töökäik vaalurvõtturiga koondatakse mugulad kahest, neljast või kuuest
vaost põllule ühte
vaalu ja teine töökäik mugulad kogutakse vaalust selleks
kohandatud kombainiga ja laaditakse veokile.
Segakoristusviis sisaldab nii otse- kui lahuskoristuse elemente: esimene töökäik
vaalurvõtturiga kogutakse mugulad kahest või neljast vaost ning paigutatakse kahe
koristamata vao vahele vaalu ning teine töökäik kombainiga koristatakse võtmata vaod
koos nende vahel oleva mugulavaaluga.
48. Kartulivõtturite liigitus ja agronõuded.
Võtturid peavad tagama mugulapesade üleskaevamise, mille laius on kuni 40 cm ja
alumiste mugulate sügavus kuni 22 cm. Normaalkoormusel ei tohi võtturi koristuskadu olla
üle 3% ja mehaaniliselt vigastatud mugulate hulk mitte üle 3%. Need kvaliteedinäitajad
olenevad peamiselt kaevesügavusest ja eraldamise (sõelumise) intensiivsusest.
Kartulivõtturid liigitatakse kahe tunnuse alusel järgmiselt:
23 1) haakimisviisi järgi: ripp- ja poolrippvõtturid;
2) tööpõhimõtte järgi: siblis- ja sõelvõtturid;
3) peamise tööorgani (sõeluri) tüübi järgi: elevaator-, sari-, trummel- ja rootorvõtturid.
49. Kartulivõtturite ehitus ja tööseadised.
Kartulivõtturi koostisosadeks on raam koos veermikuga, tööorganid ja ülekandeseadmed.
Tööorganiteks on kaeveorgan ja sõelur. Mõnedel masinatel ka kamakapurusti.
Kaeveorgan (joonis 10.8) koosneb kaevesahast ja selle külgedest. Koostisosade suhtelise
liikumise järgi võib kaeveorgan olla passiivne, aktiivne või poolaktiivne.
Passiivse kaeveorgani puhul on
sahk ja küljed kinnitatud raami külge jäigalt. Selle
puuduseks on suhteliselt suur veotakistus ja kuhjumise võimalus kaeveorgani ette.
Aktiivne kaeveorgan kujutab kandurite abil masina raamile riputatud võnkuvat kaldpinda.
Saha kinnitus võib olla ühe- või mitmeliigendiline. Võnkumine tekitatakse
väntkepsmehhanismiga. Saha võnkesagedust muudetakse vända pöörlemissageduse
muutmisega, mis toimub väntkepsmehhanismi ajami vedava kettiratta vahetamise teel
reduktori võllil.
Poolaktiivne kaeveorgan koosneb passiivsest sahast ja võnkuvatest või ümber telje
pöörlevatest külgedest. Pöörlevad küljed on kettakujulised. Nii aktiivse kui poolaktiivse
kaeveorgani puhul väheneb veotakistus, saha ummistumise oht ja mulla kuhjumise
võimalus.
Saha
tagaosas võivad olla liigendiliselt kinnituvad ja ülespööratavad sõrmed või
plaadid ,
millest osa mulda läbi variseb. Need sõrmed katavad saha ja elevaatori vahelist
pilu ning
hoiavad ära kivide kiilumise saha ja elevaatori vahele. Kui elevaatori alumine haru haarab
kivi ning kannab selle elevaatori ja saha vahelisse pilusse, pöördub sõrm üles ja kivi tõuseb
elevaatori peale (joonis 10.9). Püsiva kaevesügavuse tagamiseks on sahkade ees
kopeerratas.
50. Kartulikombainide liigitus.
Kartulikombaine (joonis 10.16) liigitatakse mitmete tunnuste alusel järgmiselt:
1) haakimisviisi järgi on ripp-, poolripp, haake- ja liikurkombainid;
2) tehnoloogilise protsessi kulgemise skeemi järgi on L-
kujulise , U-kujlise (piki-, otse- ja
vastuvoolukombainid), spiraalse ja segaskeemiga kombainid;
3) koristatavate vagude arvu järgi on ühe-, kahe-, kolme-ja neljarealised kombainid;
4) mullasõeluri tüübi järgi: elevaator-, sari- ja segasüsteemsõeluriga kartulikombainid;
5) kaeveorgani tüübi järgi: passiiv- või aktiivsahaga;
6) puhastusastme järgi: jäme(mugulasorteeri- ja noppelauata)- ning peenkombainid
(mugulasorteeri- ja noppelauaga).
51. Kartulikombainide üldehitus ja tööseadised.
Sõltuvalt tüübist koosnevad kartulikombainid (joonis 10.17) järgmistest koostudest ja
tööorganeist: kaeveorgan, sõelur, kamakaärasti, pealseärasti, tõstekonveier, kiviärasti,
nuppelaud, mugulate kogumispunker, laadimiskonveier. Kaeveorganite konstruktiivsed
erinevused selguvad jooniselt 10.18. Kasutatakse poolaktiivseid kaeveorganeid, mis
koosnevad sundajamiga külgketastest 2 (joonis 10.18, a ja c), sundajamita ketastest 3
(joonis 10.18, a) ja 2 (joonis 10.18, b) ning sahkadest 4. Individuaalraamiga kaeveorgan
kinnitub liigendiliselt kombaini raami külge.
Sõelur on nüüdisaegsetel kombainidel elevaatortüüpi (2...5 elevaatoriga). Elevaatorid
(joonis 10.22.) on kolme rihmaga kaks äärtes, üks keskel. Äärerihm võib olla lame- või
hammastüüpi. Elevaatori vedavvõllil paiknevad keti- ja rihmarataste tüübid on järgmised:
24 konsoolsõrm-
ketiratas , rullketiratas, konsoolsõrmketas, või rullketas. Ketiratta
konsoolsõrm on hambumises rihma hambaga, ketiratta hammas elevaatori varvaga. Rull
toetab elevaatorit rihma alt, ääreketast aga küljelt. Elevaatori tugirullid on kahesugused:
malmrullid toetavad elevaatori ülemist haru, kummirullid alumist.
Kamakaärastid jaotatakse kahte liiki: kamakate purustamise ja mugulate eraldamise
seadmed. Mullakamakate purustamine võib toimuda staatilise survega või löögiga. Surve
mõjul purustamine võib toimuda kas väljaspool kombaini või kombaini sees. Väljaspool
kombaini
purustamiseks on kopeerrullid (joonis 10.19 ja 10.20). Kombaini liikudes veereb
kopeerrullvaoharjal, purustades mullakooriku ja -kamakad. Kamakate purustamiseks
kombaini sees on kaks pealistikku asetsevat elastset (pneumo-)
valtsi või elevaatori kohal
asuv elastne
valts . Mulla-kamakate löögiga purustamiseks on lababiiter, mis asub
kaevesaha kohal. Purustamata jäänud kamakad eraldatakse põikijaotuskonveieril ja
noppelaual.
Elevaatorärasti kujutab endast hõrevarblinti. Varbade samm on 129...165,2 mm. Mugulad,
kivid ja kamakad langevad varbade vahelt läbi, pealsed jäävad aga nendele rippuma ja
viiakse kombainist välja. Pealsete küljes kinni olevate mugulate kombainist väljakandmise
vältimiseks on pealseärasti varustatud mugulapüüdikuga. See võib koosneda
surukonveierist ning tõukevarrastest, kusjuures surukonveier on lõputu lint kolme trumliga.
Sõrmvaltsärasti koosneb juhtsõrmedest, mis moodustavad rehiku, ja valtsist. Sõrmed
asuvad ühisel teljel sõelumiselevaatori taga, selle liikumissihiga risti. Valts asub
sõelumiselevaatori veovõlli all ja pöörleb sellega vastupidises suunas. Sõrmed juhivad
sõelumiselevaatori peal olevad pealsed ja umbrohu valtsile, kus need tõmmatakse valtsi ja
elevaatori vahelt kombaini alla. Juhtsõrmed kinnituvad teljele liigendiliselt ja on varustatud
pöördepiirikuga.
Konveieri kummitihvt kujutab vaba otsaga elastset
varrast . Et mugula ja kivi tihedus on
erinev, siis erineb ka nende raskusjõud (ühesuguse suuruse korral) ning tihvtidele mõjuv
survejõud. Mugula survejõud tihvtidele ei ületa nende kandejõudu, kivide tekitatud
survejõud
aga ületab. Mugul püsib kummitihvtidel ja liigub harjani, mis selle konveierilt maha pühib,
kivi aga vajub tihvtide vahele ja liigub harja(de) alt läbi.
Kive, eriti aga kamakaid ärastab mugulate hulgast põikijaotuskonveier. Konveieri
kummisõrmedega lindi liikumissiht on risti mugulasegu
etteande sihiga.
Siledapinnalisemad ja ümaramad mugulad veerevad lindi liikumisele põikisihis alla,
karedamad kamakad ja lapikud kivid kantakse lindiga kaasa. Kartulikombaini erinevad
sorteerimisseadised on toodud joonisel 10.25 (a ja b).
Sõrmkonveierärasti (joonis 10.24) koosneb sõrm- või liistsõrmlindist kahe trumliga
(
pingutav ja vedav).
Konveier asetseb rõhttasandi suhtes kaldu ja mass sellel jaotatakse
kaheks: pealsed liiguvad üles, mugulad, mugulasuurused kivid ja kamakad konveierit pidi
alla. Lisaks pealsetele eraldab sõrmlint mõnevõrra lahtist mulda ja väikesi kive. Mugulate
konveierilt ülemineku tõkestamiseks on selle ülemise trumli kohal pöörlev valts.
Pikijaotuskonveieri töökvaliteet sõltub suuresti selle kaldenurgast.
Tõstekonveier tõstab mugulad koos järelejäänud lisanditega üles kombaini teisele
korrusele. Tõstekonveier kujutab endast masina raami suhtes rõhtsa telje ümber pöörlevat
tööorganit. Vastavalt konstruktsioonile eristatakse kahte põhitüüpi: trummel- ja
koppelevaatorit.
Kiviärasti on kartulikombainil harikonveiertüüpi. Konveier kujutab rõhtsat
kummitihvtidega lõputut linti, hari aga rõhtsat valtsharja. Hari või harjad asuvad konveieri
25 kohal, nende pöörlemistelg on lindi liikumissihi suhtes nurgi. Kiviärasti töö kvaliteet
olenebki harja(de) kõrgusest lindi kohal ja seadenurgast.
Noppelaud on mugulate lõplikuks puhastamiseks kombainil. Seejuures eraldatakse (käsitsi)
kas mugulad lisanditest või lisandid mugulatest. Noppelaud koosneb töö- e kandepinnast,
külg- ja vaheseinast ja suunuritest, mille abil eraldatakse mugulate vool lisandite omast.
Mugulapunker on mugulate kogumiseks ja selle olemasolu võimaldab kombainil mõnda
aega töötada sõltumatult kõrvalliikuvast veokist. Punkri põhjaks on lint- või liistkonveier
(joonis 10.26). Tühjendamise lihtsustamiseks erineva kõrgusega veokile on punkril
hüdrotõste-
mehhanism .
Laadimiskonveier on mugulate laadimiseks veokile. See koosneb rõht-, kald- ja ülaosast.
Rõhtosa on jäigalt kombaini raami küljes, kald- ja ülaosa
raamid on omavahel liigendiliselt
ühendatud. Konveier viiakse töö- ja teisaldusasendisse hüdrosilindri abil. Konveieri ülaosa
kaldenurga muutmisega reguleeritakse mugulate kukkumiskõrgust (joonis 10.27).
Käitus- ja juhtimisseadmed. Haakemasina ajamiks on vedava traktori käitusvõll,
liikurmasinal mootor. Kombaini tööorganid käitatakse mehaaniliste ja hüdrauliliste
ülekannete abil.
Tööorganite juhtimine toimub hüdrauliliselt. Laadimiskonveieri ülaosa kaldenurga
muutmine, kombaini töö- ja teisaldusasendisse seadmine (kaeveorgan, laadimiskonveier),
samuti juhtrataste pööramine toimub hüdrosilindriga. Tööorganeid käitatakse
(mugulapunkri konveier, laadimiskonveier jne) hüdromootorite abil. Tööorganite juhtimine
toimub juhtpuldi (joonis 10.28) vahendusel.
52. Kartulikombaini kaeveorganid.
Joonis 10.8. Kaeveorganite tüüpe: a ja b passiivsed kaeveorganid, c, d, e aktiivsed
kaeveorganid, f ja g kombineeritud kaeveorganid; 1 sahk, 2 külg.
53. Kartulikombaini seadistamine.
54. Peedi ja
porgandi koristusviisid ja agronõuded.
Juurviljataim koosneb juurikast ja pealsest. Et pealsed on kasutatavad täisväärtusliku
söödana,
tuleb ka need koristada. Tulenevalt sellest sisaldab juurviljakoristus järgmisi
tööoperatsioone:
pealsete eemaldamine, juurikate mullast väljakergitamine või -
kaevamine , pealsete ja
juurikate kogumine, nende puhastamine mullast, laadimine veokile, vedu ja mahalaadimine
26 saagi tarbimise, töötlemise või hoiustamise kohta. Etapilisuse järgi liigitatakse
koristusviisid
kaheks: otse- ja lahuskoristus.
Otsekoristuse puhul toimuvad eelnimetatud tööoperatsioonid üheetapiliselt. See on seotud
aga organisatsiooniliste raskustega üheaegselt juurikate veo ja hoiustamisega tuleb
vedada ja söödaks valmistada ka pealsed.
Lahuskoristuse puhul toimub koristusprotsess kahe- või kolmeetapiliselt. Enamlevinud on
kaheetapiline, kusjuures kasutatakse kahte varianti:
1) esimene töökäik pealsete eemaldamine,
teine töökäik juurikate väljakaevamine, kogumine ja veokile laadimine;
2) esimene töökäik pealsete eemaldamine ja juurikate mullast väljakaevamine,
teine töökäik juurikate kogumine ja veokile laadimine.
Kolmeetapilise koristusviisi puhul toimuvad kõik etapid (pealsete eemaldamine, juurikate
väljakaevamine ja kogumine laadimisega) erinevatel töökäikudel. Peamisteks agronõueteks
juurviljade koristamisel on saagikadude ja -vigastuste vältimine ning võimalikult puhta
(mullast) saagi kogumine.
55. Peedi- ja porgandikoristite ehitus ja tööseadised.
Peedi otsekoristus toimub kombainiga Peedi lahuskoristuse puhul kasutatakse masinate
komplekti, mis koosneb pealselõikurist (vt. jaotis 10.1) ja juurikakoristist.
Koristite koostisosad on raam, veermik, haakeseade (haakemasinatel), tööorganid ja
reguleerseadised. Peedikombaini tööorganid on kaeveorgan, kitkumisseade, ühtlusti,
lõikeseade, sõelur, vahe- ja laadimiskonveierid ning automaatjuht. Juurikakoristi
tööorganiteks on kaeveorgan, sõelur, vahe- ja laadimiskonveierid ning automaatjuht.
Porgandikoristi koosneb kaeveorganist, kitkumisseadmest, pealsete eemaldamise seadmest,
vahe- ja laadimiskonveierist.
Kaeveorganiteks on kaevekäpp ja kaevesahk. Kaevekäpad (joonis 10.30, a) nõrgestavad
mulla kobestamisega peedijuurikate ja mulla vahelist sidet ning kergitavad juurikaid pisut
ülespoole. Käpad on kitkuvkombaini koostisosad ja asuvad kitkumisseadmete sektsioonide
all. Kaevesaha ülesandeks on juurika väljasurumine või -kaevamine, mõjutades seejuures
juurikat mitte osaliselt, vaid mulla kaudu. Sellega välditakse mehaanilisi vigastusi.
Kaevesahkadega on varustatud kaevavkombainid ja juurikakoristid. Kaevesahku
liigitatakse peamiselt kahe tunnuse alusel (joonis 10.30):
1) suhtelise liikumise järgi: passiiv- ja aktiivsahad (aktiivsahad pöörlevad või võnguvad);
2) üldkuju järgi: tasand-, ketas-,
hark - ning ühendsahad (
eelmiste ühendid).
Tasandsahk koosneb kahest tööpinnast, mis on kujutatavad vastastikku
asetsevate liitkiiludena, moodustades kitseneva sängi piki taimerida. Masina edasiliikumisel kaevuvad
sahad mulda, suruvad juurikad mullast välja ja tõstavad need koos mullaviiluga üles.
Tasandsahkadest kaeveorgani peamine puudus on suur veotakistus.
Harksahkadest kasutatakse nüüdisaegsetel masinatel enamasti aktiivsahku. Aktiivne
harksahk koosneb kahest teineteisele vastupidises suunas pöörlevast koonusest. Võrreldes
tasandsahkadega vähendavad harksahad kaeveseadme veotaksitust, kuid väheneb ka mõju
juurikale mulla kaudu ning suureneb otsemõju. Selle tulemusena suureneb mõnevõrra
juurikate vigastumine.
Tasandsahkade asendamine kaeveketastega vähendab samuti tunduvalt veotakistust. Saha
kettad pöörlevad ümber kaldtelgede, mistõttu murendatakse intensiivselt mullaviilu.
Murendamisel variseb osa mulda ketta kodarate vahelt läbi, mille tõttu väheneb
mullasattumine sõelurile. Kaeveketaste vahel pöörleb biiter, mis aitab juurikaid
puhastada mahalõikamata pealsetest ja mullast ning loopida neid sõelurile.
27 Kitkumisseadmetest on tuntud kaks põhitüüpi (joonis 10.32): rihm- ja haaratstüüp.
Rihmtüübi sektsioon koosneb kahest lõputust profiilrihmast, mis on tihedalt teineteise
vastu surutud (joonis 10.33). Pealsed haaratakse kitkumisrihmade vahele ja pigistatakse
kinni. Et kitkumissektsioonid moodustavad rõhttasandiga nurga 30...40°, siis masina
liikumisel tõmmatakse kitkumisrihmadega haaratud taimed välja.
Lõikeseadme ülesandeks on juurikatelt pealsete mahalõikamine. Kitkuvkombaini
lõikeseade (joonis 9.17) asub ühtlusti taga ning koosneb püstvõllile kinnitatud ühest või
kahest ketasnoast. Ketasnoa võll on varustatud biitriga, mis paiskab lõigatud pealsed
elevaatorile. Kaevavkombaini lõikeseadme ehitus on analoogne pealselõikuri
lõikeseadmega (joonis 10.1).
Sõeluri ülesandeks on mulla eraldamine juurikatest. Ehituse järgi liigitatakse peedikoristite
sõelurid elevaator-,
nukk -, ketas- ja tigusõelureiks. Elevaatorsõeluri ehitus on analoogne
kartulivõtturi vastava tööorganiga. Kasutatakse ka
lahendust , kus varbelevaatori kohal asub
survetrummel või -elevaator, mille kiirus erineb põhielevaatori kiirusest. Kui juurikad
jõuavad survepinna mõjupiirkonda, surutakse need tihedalt vastu varbu ning nad hakkavad
pöörlema ümber oma telje. Selliselt varbade vastu hõõrudes puhastatakse juurikad mullast
ja pealsetükkidest.
Vahekonveierid võivad olla lint- või varbtüüpi. Varbkonveieri veoelementideks on ketid.
Vahekonveieri ülesandeks on viia materjal (pealsed või juurikad) ühelt tööorganilt teisele.
Laadimiskonveier kujutab endast kraapidega varbkonveierit. Kraabi moodustavad reas
paiknevad püstsõrmed. Konveieril on liigendraam, mis võimaldab konveieri
laadimiskõrgust reguleerida ning tõsta teisaldusasendisse.
Automaatjuht ei erine tööpõhimõttelt pealselõikuri vastavast seadmest.
56. Lisandite ärastid kartuli mugulasegust.
Mugulatega ühesuuruste lisandite (kivid, kamakad jms) eraldamiseks kasutatakse
masinaid, mis sisaldavad mugulaid ja lisandeid identifitseerivat (ära tundvat) organit.
Sellised masinad
koosneva andurist (identifitseerivast tööorganist) ja täiturist (eraldavast
tööorganist) ning neid omavahel ühendavast elektroonilisest juhtseadmest. Selliste
masinate puuduseks on asjaolu, et objekte (mugulad, kivid) saab identifitseerida ühekaupa,
mis teeb masina vähetootlikuks ja seab täiendavad nõuded etteandeseadmele.
.
57. Kartulisorteerid ja seadistamine.
Sorteeride ülesandeks on jaotada mugulad kolme rühma: suured (massiga üle 80 g),
keskmised (50...80 g) ja väikesed (30...50 g). Iga suurusrühm võib
sisaldada kuni 10 %
naaberrühma mugulaid.
Sortimisviise on kaks: järjestikune ja rööpne. Esimesel juhul eraldatakse suurusrühmad
kogu mugulakogusest suuruse järjekorras: algul väikesed, seejärel keskmised, lõpuks
suured. Teiseviisi puhul toimub rühmitamine vastupidiselt, s.o vähenevas järjekorras.
Tööorgani ehituse järgi eristatakse rull-, võrk-, sari-, trummel- ja rihmsorteere. Trummel-
ja rihmsorteere kasutatakse kartuli fraktsioneerimiseks mitmesugustel põhjustel vähem.
Rullsorteere on kahte tüüpi. Ühtedel on mugulate liikumissuund risti (joonis 10.51) ja
teistel piki rulle.
Viimased neist pole eriti levinud. Rullsorteeri puhul tuleb silmas pidada,
et mugulad liiguvad rullidel edasi põhiliselt tagant tuleva kartulimugula tõukejõu mõjul.
Kui
etteanne on liiga väike, jäävad üksikud mugulad rullide vahele tükiks ajaks pöörlema,
mis vigastab nende koort ja soodustab haiguste levikut. Üldjuhul peab kartulikiht olema
sorteerpinnal ühe mugula paksune, paksema kihi korral väheneb sorteerimistäpsus.
Võrksorteeri tööorgan on traadist, kalavõrgust,
plastist või mitmest materjalist
valmistatud lõputu võrklint (joonis 10.52). Selle ülemine tööharu tavaliselt rappub
28 elliptiliste rullide või raputavate kandurite mõjul, et intensiivistada sorteerimist. Lindi ees
on leevenduskonveier, mis hajutab mugulaid ja pidurdab nende hoogu. Lindi kohal
paikneb tasandusvõll või hari mugulakihi laialilükkamiseks. Tavaliselt on lindi harude
vahel põikkonveier läbitulnud mugulate kõrvaleviimiseks.
58. Noppelaua konstruktsioon ja seadistamine.
Põhiliselt on levinud kaht tüüpi noppelauad rull- ja lintnoppelauad. Lintnoppelauad on
lihtsa konstruktsiooniga, kuid neil näeb töötaja vaid alla poole mugula pinnast.
Ühesektsioonilise kaheharulise lintnoppelaua üldvaade on toodud joonisel 10.55 ja
noppelaua
paigutus noppekomplektis joonisel 10.56.
Rullnoppelaual (joonis 10.57) liiguvad mugulad koos pöörlevate rullidega edasi,
samaaegselt ka ise neil pööreldes. Mugula pinnast on nähtav 92...96%. Ehituselt on
rullnoppelauad
keerukad ja ei õigusta end alati lisanditerohke kartuli valimisel. Ka on neil
mõnevõrra suurem haiguste edasikandmise oht.
59. Täppisviljelus.
60. Andmesidevõrk ISOBUS.
29










































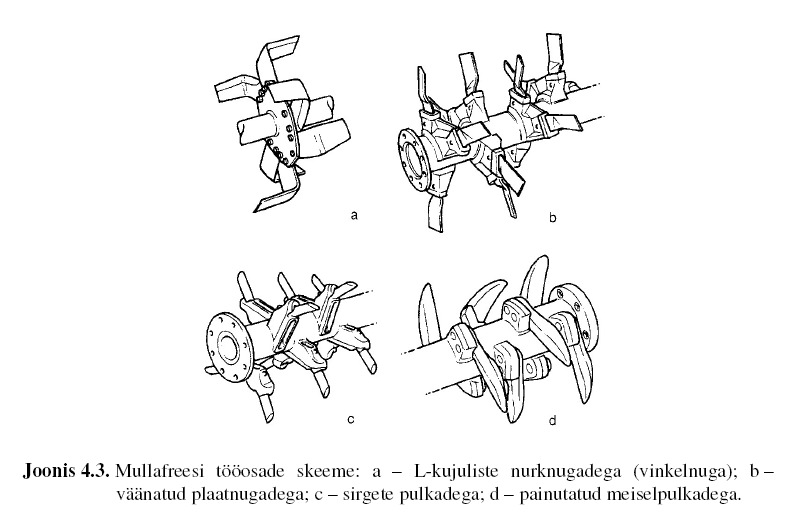




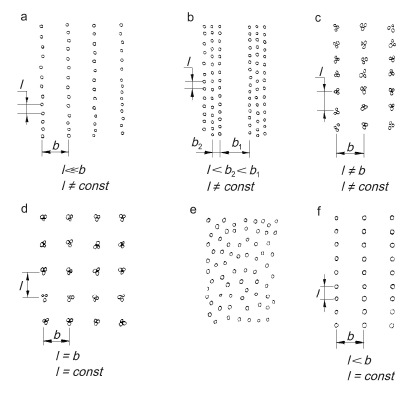
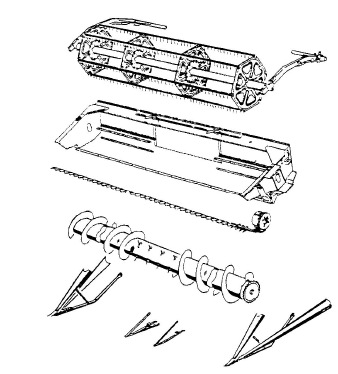
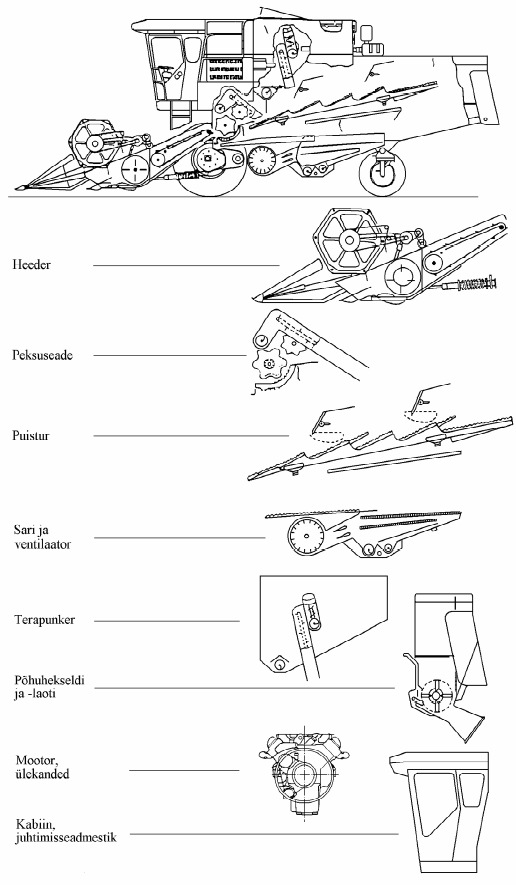


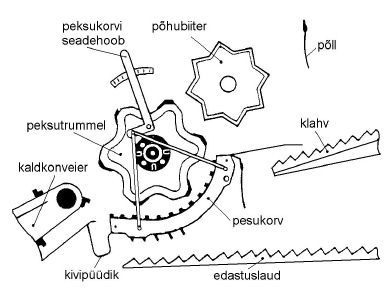
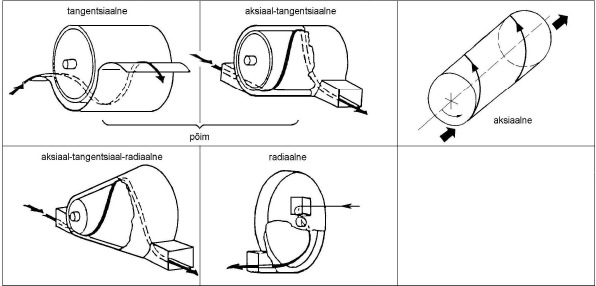
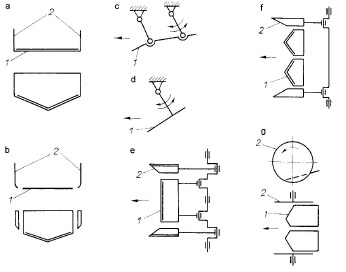
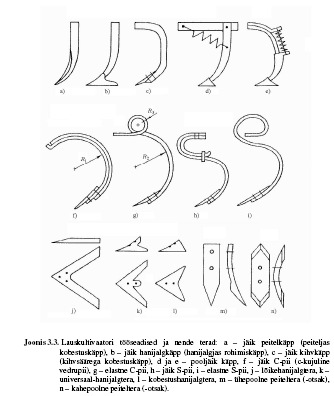

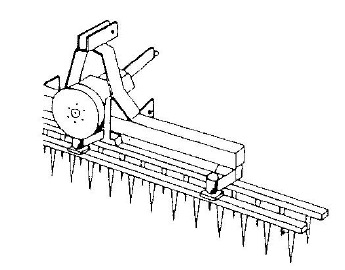
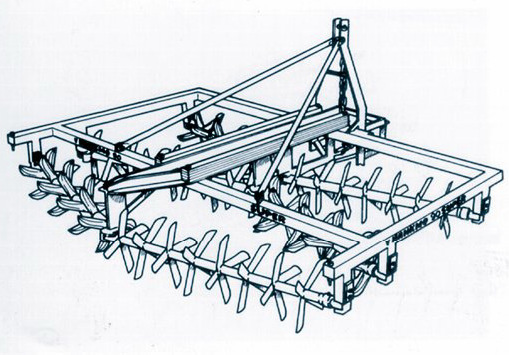
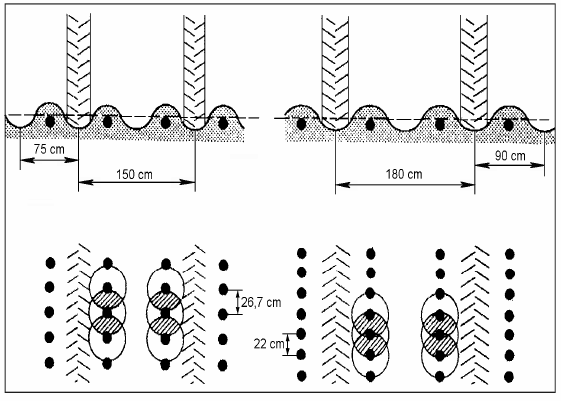
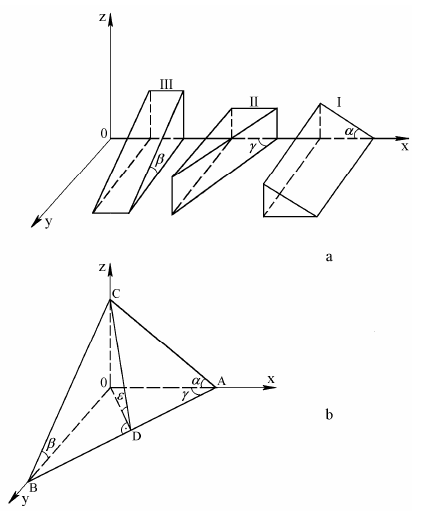
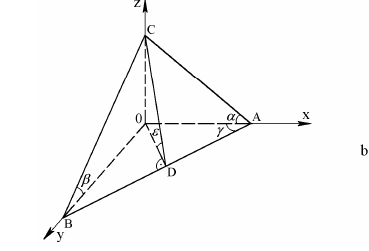
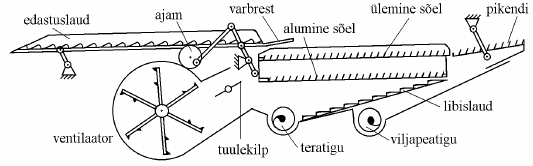





Kõik kommentaarid