Neil puudub ümbrusetaju ja järelikult pole ka väliseid tagasisideahelaid. Manipulaatori liikumist ruumis juhitakse üksnes sisemistelt asendi- ja kiiruseanduritelt saadud signaalide järgi. Esimese põlvkonna robotid suudavad haarata esemeid, mille asend ja paigutus ruumis on roboti suhtes täpselt fikseeritud. Seetõttu kasutatakse robotsüsteemis tehnoloogilisi abivahendeid, näiteks orienteeritakse töödeldavad detailid eelnevalt ruumiliselt või paigutatakse need fikseeritud pesadega kassettidesse. Nii suureneb oluliselt robotsüsteemi hind ning väheneb töö paindlikkus. Kokkuvõtteks võib öelda, et esimese põlvkonna robotite juhtseadmete ülesandeks on realiseerida jäigalt etteantud programm. Teise põlvkonda kuuluvad ümbrusetajuga robotid, mis kohastuvad keskkonnas toimuvate muutustega. Ümbrusetajuks vajaliku välise informatsiooni allikateks on mitmesugused puute-, läheduse- ja lokatsiooniandurid ning tehisnägemine. Teise
Memory Access) 2. Mida ütleb ,,Moore seadus" ja kas tänapäeval see ka kehtib? 2p V: Moore'i seadus ütleb, et umbes iga kahe aasta järel on transistorite arv protsessoris kahekordistunud. Hetkeliselt see isegi veel kehtib. 3. Mis on AGP pesa ja mis kaart sellesse ühendatakse? 3p V: Kiirendatud graafikaport. Sinna pesasse ühendatakse videokaart mis oleks otse ühenduses protsessoriga. 4. Mis pesadega on tegemist, nimeta ülevalt alla? 3p V: 1.PCI-E(8x) 2.PCI pesa(16x) 3.PCI-E(8x) 4.PCI pesa(16x) 5.AGP 5. Põhjasilla ülesanded arvutis? 3p V: Põhjasilla peamiseks ülesandeks on ühendada arvuti protsessoriga muutmälu, PCI Express või AGP siinil olevad videokaartid ning lõunasild. 6. Lõunasilla ülesanded arvutis? 3p V: Selle ülesandeks on ühendada kõik teised komponendid mis asuvad lõuna pool 7. Mis on RAM mälu ja ROM mälu ning nende peamine erinevus? 4p
Neil puudub ümbrusetaju ja järelikult pole ka väliseid tagasisideahelaid. Manipulaatori liikumist ruumis juhitakse üksnes sisemistelt asendi- ja kiiruseanduritelt saadud signaalide järgi. Esimese põlvkonna robotid suudavad haarata esemeid, mille asend ja paigutus ruumis on roboti suhtes täpselt fikseeritud. Seetõttu kasutatakse robotsüsteemis tehnoloogilisi abivahendeid, näiteks orienteeritakse töödeldavad detailid eelnevalt ruumiliselt või paigutatakse need fikseeritud pesadega kassettidesse. Nii suureneb oluliselt robotsüsteemi hind ning väheneb töö paindlikkus. Kokkuvõtteks võib öelda, et esimese põlvkonna robotite juhtseadmete ülesandeks on realiseerida jäigalt etteantud programm. Teine põlvkond Teise põlvkonda kuuluvad ümbrusetajuga robotid, mis kohastuvad keskkonnas toimuvate muutustega. Ümbrusetajuks vajaliku välise informatsiooni allikateks on mitmesugused puute-, lähedus- ja lokatsiooniandurid ning tehisnägemine. Teise põlvkonna robotite
Neil puudub ümbrusetaju ja järelikult pole ka väliseid tagasisideahelaid. Manipulaatori liikumist ruumis juhitakse üksnes sisemistelt asendi- ja kiiruseanduritelt saadud signaalide järgi. Esimese põlvkonna robotid suudavad haarata esemeid, mille asend ja paigutus ruumis on roboti suhtes täpselt fikseeritud. Seetõttu kasutatakse robotsüsteemis tehnoloogilisi abivahendeid, näiteks orienteeritakse töödeldavad detailid eelnevalt ruumiliselt või paigutatakse need fikseeritud pesadega kassettidesse. Nii suureneb oluliselt robotsüsteemi hind ning väheneb töö paindlikkus. Kokkuvõtteks võib öelda, et esimese põlvkonna robotite juhtseadmete ülesandeks on realiseerida jäigalt etteantud programm. [1] 1.1.2 Teine põlvkond Teise põlvkonda kuuluvad ümbrusetajuga robotid, mis kohastuvad keskkonnas toimuvate muutustega. Ümbrusetajuks vajaliku välise informatsiooni allikateks on mitmesugused puute-, lähedus- ja lokatsiooniandurid ning tehisnägemine
kardinad, isesulguvad uksed · Elektrilised kärbsepüüdjad · Mürgid (ettevaatust toidu lähedal) PRUSSAKAD Ennetamine: · Tähelepanu pöörata ehitus-platsidele, et elimineerida prussa-kate asupaiku · Täiuslik ehitus · Nõuetele vastav majapidamine Tõrje: · Keemiline (lõhutakse elutsükkel) · Füüsikaline (ei hävita täielikult) LINNUD- tuvid, varblased, kuldnokad Tõrje vajadus: · Levitavad haigusi · Saastavad toiduaineid · Ummistavad pesadega vihmaveerenne ja torusid · Pesadest tungivad putukad hoonesse Ennetamine: · Head majapidamistavad · Kõrvaldada õrred, millel linnud puhkavad · Kontrollida uste ja akende tihedust Tõrje: · Füüsikaline (lõksud, võrgud, mahalaskmine) · Keemiline (uimastavad ühendid) NB! Peab jälgima looduskaitseseadusi MIKROORGANISMID · Nad on mikroskoopilised · Neid leidub kõikjal · Enamik mikroorganisme on meile
jalgade jaoks. Number pesa nime järel on protsessori jalgade arv, mis sellesse pessa sobib. Pesa küljes on väike metallist või ka plastist hoob, mis tuleb protsessori sisestamiseks üles tõsta ning mille allasurumisel protsessor fikseeritakse kindlalt paika. Hoova ülestõstmisel vabanevad protsessori jalad ja teda on kerge pesast eemaldada, siit ka seda tüüpi pesade nimetus ZIF (Zero Insertion Force, nullsisestusjõud). Hetkel on lauaarvutite jaoks kolme sorti pesadega plaate: Socket 370, mis mõeldud Pentium III, vanema seeria Celeronide ning VIA Cyrix protsessorite jaoks. Socket 478, mida kasutavad Pentium 4 ning uuemad Celeron protsessorid. Socket A, mis on kasutusel AMD Athlon protsessorite puhul. Võimsamates lauarvutites võib kohata ka muidu serverimaailma kuuluvaid kahe protsessoripesaga emaplaate (DualProcessor). Neid on nii Socket 370 (mõeldud Pentium III serverprotsessoritele) kui Socket A (kasutavad AMD
jalgade jaoks. Number pesa nime järel on protsessori jalgade arv, mis sellesse pessa sobib. Pesa küljes on väike metallist või ka plastist hoob, mis tuleb protsessori sisestamiseks üles tõsta ning mille allasurumisel protsessor fikseeritakse kindlalt paika. Hoova ülestõstmisel vabanevad protsessori jalad ja teda on kerge pesast eemaldada, siit ka seda tüüpi pesade nimetus ZIF (Zero Insertion Force, nullsisestusjõud). Hetkel on lauaarvutite jaoks kolme sorti pesadega plaate: Socket 370, mis mõeldud Pentium III, vanema seeria Celeronide ning VIA Cyrix protsessorite jaoks. Socket 478, mida kasutavad Pentium 4 ning uuemad Celeron protsessorid. Socket A, mis on kasutusel AMD Athlon protsessorite puhul. Võimsamates lauarvutites võib kohata ka muidu serverimaailma kuuluvaid kahe protsessoripesaga emaplaate (Dual–Processor). Neid on nii Socket 370 (mõeldud Pentium III serverprotsessoritele) kui Socket A (kasutavad AMD
kasutamisel, sest veojõu kasvades tõmmatakse rihm tugevamini rattapöia soonde, mis suurendab ratta ja rihma vahelist hõõrdejõudu (joonis d). Kui kiilrihma libisemist soovitakse täielikult välistada, siis kasutatakse hammastatud rihmu ja vastava ehitusega rattaid (joonis c). Niisugust ülekannet nimetatakse hammasrihmülekandeks. Kettülekande vedav ja veetav ratas on hammastega, mis haakuvad nende vahel jõudu üle kandva keti pesadega. Kõige ulatuslikumalt kasutatakse rullpuks-kette, mille tüüpiliseks esindajaks on jalgrattakett. Need ketid koosnevad omavahel sarniirselt liituvate lülide ahelast. Kahe paralleelse ahela vahel on iga sarniiriga seotud telgpuksil veerev rullik. Hammasülekannetes on vedav ja veetav ratas omavahel otseses puutes. Rataste vahelise libisemise välistatakse ratastel olevate hammaste omavahelise hambumisega. Selleks, et ei tekiks hambaid murdvat pinget ja liigset
ka väliseid tagasisideahelaid. Manipulaatori liikumist ruumis juhitakse üksnes sisemistelt asendi- ja kiiruseanduritelt saadud signaalide järgi. Esimese põlvkonna robotid suudavad haarata esemeid, mille asend ja paigutus ruumis on roboti suhtes täpselt fikseeritud. Seetõttu kasutatakse robotsüsteemis tehnoloogilisi abivahendeid, näiteks orienteeritakse töödeldavad detailid eelnevalt ruumiliselt või paigutatakse need fikseeritud pesadega kassettidesse. Nii suureneb oluliselt robotsüsteemi hind ning väheneb töö paindlikkus. Kokkuvõtteks võib öelda, et esimese põlvkonna robotite juhtseadmete ülesandeks on realiseerida jäigalt etteantud programm. 3.2.2. Teine põlvkond Teise põlvkonda kuuluvad ümbrusetajuga robotid, mis kohastuvad keskkonnas toimuvate muutustega. Ümbrusetajuks vajaliku välise informatsiooni allikateks on mitmesugused puute, lähedus- ja lokatsiooniandurid ning tehisnägemine
omanad sageli dominantliigi rolli. - Nad on paikse eluviisiga. Sipelgakooslus ja -asurkonnad kujunevad aastasadade jooksul ning püsivad ühel kohal väga kaua. Tänu ühiselu tekkega kaasnenud eelistele suudavad nad mahendada keskkonna muutusega kaasnevaid kahjulikke mõjusid järglastele ja terve pere arengule (sotsiaalne homöostaas). - Sipelgakooslus, väljakujunenud metsakuklase asurkond koos vanade mahajäetud pinnases reljeefselt säilinud kraatritega, vanade ja noorte pesadega peegeldavad asurkonna ja taimekoosluse arengulugu tagasiulatuvalt mitme metsapõlve ulatuses. - Sipelgakoosluse või asurkonna iga pesa elutegevus, käitumine, sipelgate aktiivsus radadel ja pesadevahelised suhted peegeldavad täpselt keskkonna valgus-, soojus- ja veereziimis asetleidvaid järsemaid muutusi. Samuti reageeritakse kiiresti toiduressursside muutusele ja saastedünaamikale. - Sipelgad on polüfaagid, eelkõige röövtoidulised putukad
jäävad ,,tavalised" jäljed näha on talla ja varbapäkad, metsnugise jälgede puhul on talla- ja varbapäkki raske eristada (võrreldav villastes sokkides kõndimisel tekkinud jälgedega). Lihatoidulised, kuid söövad ka taimset toitu (marju, puuvilju). Peamiselt söövad putukaid, limuseid, pisiimetajaid, linnupoegi ja -mune, oravaid (eriti metsnugis), raibet. Nugised on üksikeluviisiga , peamiselt öise aktiivsusega kiskjad. Pesadega, milleks on puuõõnsus või endine röövlinnu või oravapesa, on nad seotud vaid poegade kasvatamise perioodil. Kivinugis (Martes foina) www.jahindusinfo.ee Jooksuaeg on juunis-juulis, kuna nugistel on kärplastele omane soikeperiood (latentne periood) munaraku arengus, sünnivad pojad alles järgmise aasta aprillis. Poegi ühes pesakonnas 2-4, pojad sünnihetkel pimedad ja abitud, emapiima saavad 2,5 kuud ning
....-hiired, rotid 2...insektid.......-kärbsed, herilased, prussakad, puuviljakärbsed, porikärbsed 3...linnud......-tuvid, varblased, kuldnokad, kajakad 4......koduloomad....-koerad, kassid KAHJURITÕRJET ON VAJA TEHA, SEST KAHJURID: Levitavad haigusi Saastavad toiduaineid ja valmistoitu nukkude, munade ja laipadega (insektid) Levitavad karvadel, jalgadel ja kehal olevaid mikroorganisme Söövad toiduaineid ja valmistoitu (närilised, linnud) Ummistavad pesadega renne ja vihmaveetorusid (linnud) Saastavad toitu uriiniga (närilised) TUNDEMÄRGID NÄRILISTE OLEMASOLU KOHTA: 1. Väljaheited 2. Närimistunnused 3. Mahaaetud või määrdunud esemed 4. Näriliste uriiniloigud 5. Otsene nägemine, häälitsused, lõhn. KAHJURITE ENNETAMINE 1. Hoia puhtust ja pea kinni headest majapidamisharjumustest 2. Hoia uksed, aknad kinni või kata aknad kärbsevõrkudega 3. Kontrolli üle sissetulevad kaubakastid 4
Sealt jätkub rada külavaheteed mööda Jõksi küla suunas. Umbes 2 kilomeetri pikkuse matka järel jõuab Kalmetumäe (Kääpamäe) paljandi juurde, mis on 14 m kõrge ning kuhu kaldaallikad on uuristanud ulatuslikke koopaid. Seal varjasid inimesed end veel II maailmasõja lahingute päevil. Kalmetumäe oru perv peab aga pärimuse järgi olema Põhjasõja-aegne matmispaik. Järgmisest jõekäärust leiab rohkete kaldapääsukeste pesadega 14 m kõrguse paljandi, mida on hakatud kutsuma põhja pool oleva küla järgi Jõksi müüriks. Jõksi müüri all on telkimisplatsiks sobiv metsalagendik. Müürilt avaneb vaade jõe vastaskaldal kerkivale Liinamäele (Hinniala) varikule. Variku lõpetab Hobusejala (Puutka ehk Päevapööramise) mägi, mille näol peaks tegemist olema oosiga, mis on 350 m pikk ja 20 m kõrge. Mäe hari on nii kitsas, et kavalad jahimehed olevat ajanud seda mööda metsloomi otse kotti. Kunagi
eksperthinnang varisenud hävinud ei 4.3 Elupaikade soodsa seisundi tagamine Kaitsekorralduste eesmärkide täitmise eelduseks on piisavas mahus suur-konnakotkaste elupaikade säilimine vastavalt Looduskaitseseadusele. Üheks kaitsekorralduse viisiks on teadaolevate konkreetsete pesapaikade kaitse. Kõigi teadaolevate pesadega tuleb tagada liigi edukas pesitsuseks piisav kaitse püsielupaigana või liigile sobiva kaitsealade tsoneeringuga. Konkreetsetel pesitsuspaikadel on vajalik tagada soodne seisund 2 km ulatuses, majandades säästlikult piisaval hulgal saagi-jahialadeks sobilikke rohumaid (Keskkonnaministeerium. s.a.). Suur-konnakotkas kuulub I kategooria kaitsealuste liikide alla, sellepärast tuleks Looduskaitseseaduse alusel tagada kõigi teadaolevate elupaikade kaitse. Nagu eelnevas
Eesmärgiks on sünteesida samaaegselt võimalikult palju erinevaid ühendeid. Paralleelsünteesi meetodid ja eelised. Paralleelsüntees - suure hulga erinevate individuaalsete keemiliste ühendite üheaegne süntees, kasutades iga lähteaine jaoks eraldi minireaktorit ja ühesuguseid reagente. Igas reaktoris tekib individuaalne ühend. Paralleelsüntees on kiire ning skriining väga kiire, täpne. Kolbide asemel kasutatakse pesadega mikroplaate (microtitre plate). Pesa maht võib olla 2-100 μl ning ühel mikroplaadil võib olla kas 96, 384 (4x96) ja 1536 (16x96) pesaga. Võib kasutada ka kuni 96 2-ml reaktsioonipesa, mis on automatiseeritud juhtimisega (inertgaas, segamine, lisamine, töötlus jne). Eelisteks on: Igas pesas tekib individuaalne aine, mille aktiivsuse saab otse määrata Iga sünteesitud aine struktuuri saab otse määrata Sünteesi saab läbi viia homogeenses lahuses
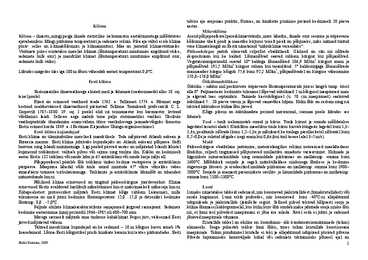
liiguvad ja juhtsiini seisuga määratakse mis suunaliselt ja mille vahel andmed parajasti liiguvad. Joonis 1-2. Arvuti plokkskeem Et ühendada erinevad komponendid ja võimaldada arvutil andmevahetust perifeeriaseadmetega on kasutusel täiendav integraalskeemide komplekt ehk tugikiibistik. Kõik arvuti komponendid ühendatakse koos tööle spetsiaalsel trükkplaadil ehk emaplaadil. Emaplaadil on tugikiibistik koos vajalike pesadega, et ühendada sellele protsessor, mälu ning sisend-väljundseadmete pordid. Emaplaat jagab ka voolu erinevatele süsteemikomponentidele ja selleks on seal toitepistikud ning täiendavad pingeregulaatorid. Et arvutisüsteem saaks funktsioneerida on vaja arvutile toiteadapterit. Arvuti põhikomponendid on ümbritsetud arvutikorpusega. Arvutikorpuse ülesanne on kaitsta arvutikomponente vigastuste eest, muuta arvuti ohutuks, käepäraseks ja meeldivaks
majafassaade ja ausambaid. Koduloomad koerad, kassid; Ei tohi toidukäitlemisettevõttes pidada ka lemmikloomi, sest ka nemad võivad levitada haigusi. KAHJURITÕRJET ON VAJA TEHA, SEST KAHJURID: Levitavad haigusi; Saastavad toiduaineid ja valmistoitu nukkude, munade ja laipadega (insektid); Levitavad karvadel, jalgadel ja kehal olevaid mikroorganisme, Söövad toiduaineid ja valmistoitu (närilised, linnud) Ummistavad pesadega renne ja vihmaveetorusid (linnud); Saastavad toitu uriiniga (närilised) KUIDAS ENNETADA KAHJUREID: Hoia puhtust ja pea kinni headest majapidamisharjumustest; Hoia uksed, aknad kinni või kata aknad kärbsevõrkudega; Kontrolli üle sissetulevad kaubakastid; Töölt lahkudes sulge kõik veekraanid, sest rotid joovad rohkem, kui söövad; Kõrvalda toidujäätmed koheselt ja sulge jäätmenõud kaanega;
Atribuutgrammatika kasutab sõna struktuuri (sünteesit' atrib) ja konteksti (pärit' atrib), et esitada sõna semantika. 22. Turingi masin ja registermasin. Lahenduvad ja genereeritavad hulgad. Turingi masin on struktuur, käsitlemaks kontekstist sõltuvate ja kitsendusteta fraasistruktuuri grammatikate süntaksanalüüsi. Selle lahendusvust. See on üleüldine arvuti mudel, millega eelkõige analüüsitakse lahenduvust. Lõpmatu lint diskreetsete pesadega. Lugemis-kirjutamispea. Lõplik hulk olekuid. Programm käskude hulk. Käsk lindilt lugemine, siirdumine uude olekusse koos lugemispea liigutamise / kirjutamisega. Üks algolek, üks või mitu lõppolekut. Masin A realiseerib funktsiooni f, kui enne töö algust on lindil x ja pärast töö lõppu y = f(x). Iga efektiivselt arvutatava funktsiooni võib realiseerida Turingi masinal. Lint on mitte kasuliku info seisukohalt täidetud 'tühikutega'. Turingi masina math definitsioon: T
Lkg ajutiselt liigniisked, ülaosas valdavalt kerge lõimisega, A üle 5 cm, kujunenud Bh, Bf Metsakõdu varu 2030 Mg ha-1, A-s 6070 Mg ha-1. ja Ea. Happelised, keemine puudub. Gleistumine C-s (Cg), selgesti näha Ekso- ja endogeense org. aine suhe huumuskattes 23, kogu profiilis 34. gleistumistunnused, B- tsementeerunud pesadega. Põllum. Hu 2,22,6%, N varu 56 Mg ha-1, Nüld 0,13% põllum ja 0,15% metsam. Profiil: O A Ea Bg Cg või OAEaBBhCg C:N metsam. 16, põllum. 11 Leetumisastme järgi nagu parasniisked (vt. eespoolt): Mullaelustiku tegevus looduslikes LPg pidurdunud või väheaktiivne, mida pärsib happeline LkIg gleistunud nõrgalt leetunud muld
Suure leegi puhul, kui ei õnnestu ventiili sulgeda, kasutage selleks süsihappegaasi (CO 2) või spetsiaalset kuiva pulbrit. Atsetüleeni teine omadus, mida peaks teadma, on tema lagunemine algkomponentideks – süsinikuks ja vesinikuks suure temperatuuriga üle 350º C ja üle 2 baarilise rõhu juures löökidega transpordil ja hoidmisel. Selleks, et ära hoida atsetüleeni lagunemist surutud gaasilises olekus, siis balloonid tema hoidmiseks täidetakse seest poorse massiga väga väikeste pesadega. See välistab balloonis tekkiva gaasilise atsetüleeni olemust. Poorne mass on veel immutatud atsetooniga, milles lahustatakse atsetüleeni. Selline kooslus vähendab atsetüleeni lagunemist ja hoida gaasi väikese surve all ja vähendades seega plahvatusohtliku lagunemise tekkimist. Juhuslikkuse poolest võib ikkagi tekkida gaasi lagunemine mitte ettevaatliku ballooni käsitlemise tulemusel. See kas kukkus või sai põrutada,
vahekihte. Iseloomulikud on õhukesed kuni sügavad leedemullad, L(k)I, L(k)II, L(k)III, LI, Ls ja gleistunud nõrgalt leetunud leedemuld LIg. O-horisondi tüsedus 3-7 cm, E-horisondi tüsedus kuni 20 cm. Leedemuldadel järgneb kõduhorisondile 3-10 cm tüsedune vähehuumuslik A-horisont, kusjuures E-horisont on pidev või esineb katkendliku, kuni 15 cm tüseduse helehalli kihina. B-horisont tihenemata või väheste pruunide nõrgliiva pesadega, üleminek lähtekivimiks aeglane (BC-horisont sage). Mullareaktsioon on happeline (pHKCl 3,5-5,5), küllastusaste madal (kuni 25%). Veereziim: mulla ülakiht perioodiliselt kuiv. Puurinne: valitseb mänd; kuuske leidub vähesel määral järelkasvuna või II rindes; kui mullas esineb sügavamal raskema lõimisega kihte, võivad kuused saavutada ka I rinde kõrguse. Boniteet I III. Põõsarinne: puudub või on liigivaene: kadakas, vaarikas, pihlakas.
mune. Koorega keedetud munade koor eraldub kergesti, kui peale keetmist lasta munadel pisut kuivada ja seejärel asetada nad mõneks ajaks külma vette. Mune keedetakse vahetult enne serveerimist. Varem valmis keedetud munadel võib vedel ja poolvedel munarebu omandada sinaka värvuse. Kõva munarebu ümber võib tekkida sinine viirg. Praetud härjasilmad ehk tervelt praetud munad. Ilusaid ümmargusi härjasilmi saab siis, kui neid praadida pesadega pannil. Härjasilmi praetakse väheses rasvas. Munad lüüakse lahti otse kuuma rasva sisse. Munarebu peab jääma terveks. Praetakse seni, kuni munavalge muutub piimjas-valgeks ja rebu on kergelt 145 hüübinud. Maitsestatakse soola ja peenestatud musta pipraga. Pipart riputatakse ainult munarebule. Soovi korral võib härjasilmi praadida ka kahelt poolt. Lisandiks sobivad:
damisel stoppsignaali. Selleks on laterna kere jaotatud kaheks, temas on 2 lampi (harvem üks kähe hõõgniidiga lamp). Numbrimärki valgustav ja tagatulel andev väike geldist (reflektorist), hajutist ja lampidest koos pesadega. lamp süttib samaaegselt esilaterna sisselülitamisega, stopp- Optiline element on vedruklambritega kinnitatud hoidik- tuli (võimsam lamp) aga piduripedaaliie vajutamisel, mil ehisvõru külge, hajuti ning peegeldi vahelist pilu tihen - rakendub piduriajamiga ühendatud stopptulelüliti. dab kummiröngas. Paraboolse ref lektori sisepind on val- Uuematel mootorrattamudelitel võivad tagalaternaga