Referaat Harjadeta elektrimootor Õppeaines: Elektrotehnika Transporditeaduskond Sisukord 1. Elektrimootor 1.1. Asünkroonmootor 1.2. Asünkroonmootori rootor 1.3. Sünkroonmootor 2. Püsimagnetiga sünkroonmootor 2.1. Suurevõimsuselised sünkroonmootorid 2.2. Väiksevõimsuselised sünkroonmootorid 3. Harjadeta alalisvoolumootorid 4. Samm-mootorite tööpõhimõte 4.1. Unipolaarne mootor 4.2. Bipolaarne mootor 4.3 .Lainetalitus 4.4 .Samm-mootori koormamine 5. Kasutusalad 1.Elektrimootor Elektrimootor on seade, mida kasutatakse elektrienergia muundamiseks mehaaniliseks tööks.Enamik elektrimootoreid töötab tänu elektromagnetisminähtusele. Kuid on ka
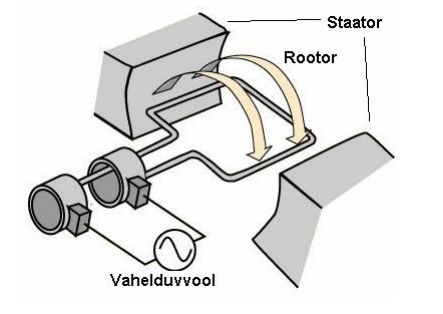
.. 4), valmistatakse üksik- ehk väljepoolustega (salient pole) b) Auru- ja gaasiturbiinide pöörlemissagedus n = 3000 p/min, seega p = 1 c) Diiselgeneraatorid (600 ... 1500 p/min) Sünkroonmootoreid kasutatakse seal, kus on vajalik konstantne (koormusest sõltumatu) pöörlemissagedus ja mootorit lülitatakse harva sisse ja välja Mootorina suurtes ventilaatorites, tsentrifugaalpumpades, kompressorites jne. Sünkroonkompensaator on tühijooksul töötav üleergutatud sünkroonmootor, mille eesmärk on kompenseerida reaktiivenergiat, parendades sellega cos -d 2 Töötamispõhimõte Töö põhineb elektromagnetilisel induktsioonil, mille käigus mehaaniline energia muundatakse vahelduvvoolu elektrienergiaks Jättes alalisvoolugeneraatori kommutaatorita, saame vahelduvvoolugeneraatori. Pöörlevat osa nimetatakse rootoriks, seisvat osa staatoriks.
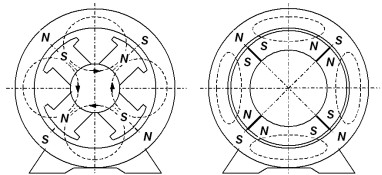
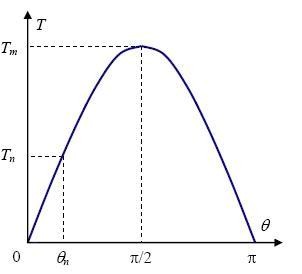
õhupilu on minimaalne pooluse kohal. Teisel juhul on rootori pind sile ning õhupilu on ühtlane kogu ulatuses. Väljepoolustega masin töötab ka ilma ergutusväljata, s.t ilma ergutuseks kasutatavate püsi- või elektromagnetiteta. Sel juhul on tegemist nn reaktiivse sünkroonmootoriga ehk reluktantsmootoriga (reluctance motor), mille töö põhineb õhupilu magnetilise takistuse (e. reluktantsi) muutumisel sõltuvalt rootori asendist. Sünkroonmootor arendab momenti ainult sünkroontalitluses. Seepärast on omaette probleemiks sünkroonmootori käivitamine otsevõrkulülituse puhul, milleks kasutatakse asünkroonkäivitusmähist. Sünkroonmasina kiiruse reguleerimine toimub samuti nagu asünkroonmasina puhul toitepinge sageduse reguleerimisega.
Asünkroonmootori tööpõhimõte Asünkroonmootor on tööstuses kõige enam kasutatav elektrimootor, mis on tingitud eelkõige tema lihtsast konstruktsioonist. Asünkroonmootor koosneb paigalseisvast staatorist ning pöörlevast rootorist, mis on üksteise suhtes paigutatud nii, et nende vahel eksisteeriks õhupilu laiusega kuni 0,1...1 mm. Asünkroonmootori ehitus on näidatud Joonis 2.8. Joonis 2.9. Ühe ja kahe pooluspaariga lühisrootoriga asünkroonmootor Asünkroonmootori staator koosneb mitmest vasktraadist mähisest, mis on üksteise suhtes ruumiliselt nihutatud ning mida toidetakse kolmefaasilisest elektrivõrgust. Mähised võivad olla ühendatud kas kolmnurka või tähte. Selline paigutus tekitab ümber staatori pöörleva magnetvälja, mis läbi õhupilu aheldub rootoris olevatel mähistel ning tekitab rootori elektrivoolu (elektromagnetilise induktsiooni nähtus). Vool tekitab rootoris omakorda magnetvälja, mille vastasmõjul staatori magnetväljaga tekkib jõud,
INTENSIIVKURSUS ”TOOTMISE AUTOMATISEERIMINE” Intensiivkursus kuulub projekti: „Energia- ja geotehnika doktorikool II” tegevuskavasse Ins. Viktor Beldjajev TÄITURMEHHANISMID Loengumaterjalid Tallinn 2010 Sisukord Tähistused ................................................................................................................................. 5 1. Sissejuhatus ........................................................................................................................... 6 2. Täiturmehhanismide olemus ............................................................................................... 7 2.1. Täiturmehhanismide klassifikatsioon .................................................................................. 7 2.2. Automaatsüsteem ......................................
Küsimuste vastused 1) Alalisvoolumootorid Alalisvoolumootorites kasutatakse magnetvälja tekitamiseks staatoril paiknevat ergutusmähist või püsimagneteid. Kontaktrõngaste ja harjakeste abil juhitakse pöörlevasse raami alalisvool (vt. Joonis 2.5). Et rootor pöörleks püsivalt ühes suunas, tuleb ankruvoolu suunda iga poolperioodi tagant reverseerida. Ankruvoolu suuna muutmiseks kasutatakse alalisvoolumootorites mehaanilist või pooljuhtidega töötavat kommutaatorit.Sõltuvalt ergutusmähise asukohast võivad alalisvoolumootorid olla kas a) võõrergutusega, kus ergutusmähist toidetakse eraldi toiteahelast, b) jadaergutusega, kus ergutusmähis on ühendatud jadamisi ankruga, c) rööpergutusega, kus ergutusmähis on ühendatud paralleelselt ankruga, või siis kombineeritult jada -ja rööpergutusega. Lisaks sellele kasutatakse kas püsimagnetergutust, mille puhul staatoril paiknevate püsimagnetitega tekitatakse ajas muutum
3I k Mootori näivtakistus käivitusel (lühitakistus) - 1.5 Mootoritüüpide tingmärgid Mootoritüüpide tingmärgid vastavalt standardile IEC60617 Ühefaasiline lühisrootoriga asünkroonmootor Kolmefaasiline lühisrootoriga asünkroonmootor Kolmefaasiline faasirootoriga asünkroonmootor Ühefaasiline sünkroonmootor 2 ALALISVOOLUMOOTORID 2.1 Haruvoolumootor 2.1.1 Alalis-haruvoolumootori põhivõrrandid ja loomulikud karakteristikud U=E+IαR U-võrgupinge E–ankrumähises indutseeritud vastu-elektromotoorjõud E=kЕфω Iα-ankruahela vool ω-nurkkiirus T=kTфIα T-mootori elektromagnetiline moment
Alalismootorid koosnevad õhupiluga üksteisest eraldatud staatorist ja rootorist. Vahelduvvoolumootorid Vahelduvvoolumootorid jagunevad nii ühe- kui ka kolmefaasilisteks mootoriteks. Ühefaasilised mootorid on levinud kõige enam tööriistades ja majandamistes. Kolmefaasilised vahelduvvoolumootorid on kõige enam levinud võimekates tööstuslikes seadmetes. Mootori käivitamiseks, et tekiks pöörlev väli, tuleb kasutada käivitusahelat. Sünkroonmootor, nagu ka asünkroonmasin, tekitab pöörleva magnetvälja ning erinevalt asünkroonmootorist, tekitatakse see sünkroonmootori rootoris. Rootori ergutamiseks elektromagnetite abil tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril asuvate kontaktrõngaste, püsimagneti puhul pole vaja seda kasutada. 3 Impulsstoitega mootorid Samm-mootorid erinevad sünkroonmootorist selle poolest, et selles tekib pöörlev magnetväli, mida





























Kõik kommentaarid