kool
eriala
nimi
klass
ELEKTIMOOTORReferaat
Juhendaja :
õpetaja
linn
2015
SISSEJUHATUS
Mis
on
elektrimootor ? Kes oli leiutaja elektrimootoril? Milleks seda
kasutatakse ja millised on elektrimootori
alaliigid ? Millised on
erinevad mootoritüübid? Neile küsimustele ma saan vastuse
referaadi koostamise käigus.
2
Elektimootor
Elektrimootor
on
elektromehaaniline seade, mis muudab elektri mehaaniliseks
energiaks ehk tööks. Elektrimootori
leiutas mees nimega Michael
Faraday . Faraday kõige tähtsamad
leiutised olid
elektriga seotud,
sest ta leiutas elektrimootori, dünamo ja Faraday silindri, mis olid
kõik elektriga seotud. Ta oli väga hea eksperimentaator, kuid ta
oli madala haridusega, mis puudutas matemaatilist osa.
Elektrimootorid koosnevad paigalseisvast staatorist ja pöörlevast
rootorist. Staatoris tekitatakse pöörlev
magnetväli , mis on
vajalik rootori pöörlema panemiseks.
Rootor pöörleb laagritele
toetuval võllil, mille külge on omakorda ühendatud
mehhanism .
Staatori ja rootori vahel eksisteerib õhupilu, mille kaudu toimub
magnetvälja penetratsioon staatorist rootorisse. Kasutamine:
elektriautod,
tehastes , miksrite ja muude liigutamine, tehnika
liigutamine linti mööda, kodu elektritarvetes ehk näiteks
akutrell, elektriline munavispel,
vints . Elektrimootorit on vaja, et
inimese elu kergendada, sest siis saab tekitada elektrist mehaanilise
jõu, mille abil näiteks asju liigutada, tõsta või üldse midagi
muud. Elektrimootoril on tänapäeva maailmas suur tähtsus, sest
kõik on põhiliselt elektri pealt toimiv, seega kasutatakse ka neid
mootoreid igal pool, et elu kergendada.
Kui
anda elektrimootorile
suuremal hulgal voolu, siis võib neid jagada:
alalisvoolumootorid, vahelduvvoolumootorid, impulsstoitega
mootorid .
Alalismootorid
Alalismootorid
on üks elektrimootori
alaliike . Alalismootori põhisuuna muutmiseks
tuleb kasutada mehaanilist või pooljuhtidega tööd. Alalismootorid
koosnevad peamiselt õhupiluga üksteisest eraldatud staatorist ja
rootorist. Staatorid paiknevad magnetvälja poolustel, milles
tekitatakse magnetväli.
Saab
järeldada, et kui suurendada mootori pinget, siis saab tõsta ka
pöörlemiskiirust. Siit järeldub see, et nii magnetvoogu ja
pöördemomenti võib mõjutada kui suurendada või vähendada
mootori pinget. Ankruvoolu
suuna muutmiseks kasutatakse alalisvoolumootorites mehaanilist või
pooljuhtidega töötavat kommutaatorit.Alalismootorid
koosnevad õhupiluga üksteisest eraldatud staatorist ja rootorist.
Vahelduvvoolumootorid
Vahelduvvoolumootorid
jagunevad nii ühe- kui ka kolmefaasilisteks mootoriteks.
Ühefaasilised mootorid on levinud kõige enam tööriistades ja
majandamistes. Kolmefaasilised vahelduvvoolumootorid on kõige enam
levinud võimekates tööstuslikes
seadmetes . Mootori käivitamiseks,
et tekiks pöörlev väli, tuleb kasutada käivitusahelat.
Sünkroonmootor , nagu ka
asünkroonmasin , tekitab pöörleva
magnetvälja ning erinevalt asünkroonmootorist, tekitatakse see
sünkroonmootori rootoris. Rootori ergutamiseks
elektromagnetite abil
tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril
asuvate kontaktrõngaste, püsimagneti puhul pole vaja seda kasutada. 3
Impulsstoitega mootorid
Samm-mootorid
erinevad sünkroonmootorist selle poolest, et selles tekib pöörlev
magnetväli, mida ei tekitata kolmefaasiliste siinuspingetega, vaid
masina järjestikuste impulssidega. Samm-mootorid sobivad
kasutamiseks eriti väikese positsioonijuhtimisega ajamites, kus impulsside arv on võrdeline rootori pöördenurgaga. Samm-mootorid
pole sobivad tänu nende võimsuse suurusele, kuna kasutegur jääb
väikeseks .
Kaod elektrimootorites
Igas
elektrimasina mehhanismis tuleb ette erinevaid kadusid. Kaod tekivad
siis, kui ilmnevad järgnevad
asjaolud . Teraskaona tuntakse kadu, mis
tekib masina magnetsüdamikus, kus toimub hüsteesi ja pöördevoolude
vahel magnetväli. Kuna mähistel on teatud aktiivtakistus, siis
eraldub
neilt soojusenergiat. Kuna
mähised koosnevad põhiliselt
vasest, siis nimetatakse neid kaudsid ka vaskkadudeks.
Ventilatsioonikao põhjustab masinaosade ohu vahelised hõõrded.
Hõõrdekao põhjus tekib masina laagrite hõõrdest.
Elektrimootorite talitusviisid
Töömasinad
on tavaliselt erineva talitusega, milles peab olema elektrimootorid
kui
täiturmehhanismid õigesti valitud. Sõltuvalt
oludest võib
muutuda töömasina koormus, pöörlemiskiirus, pöörlemissuund. Ka
nende
muutustega peavad mootorid tagama õige töö. Talitused võivad
olla järgmised: ühtlasel püsikiirusel pööreldes ventilaator,
ketassaag, elektertransport, muutuva kiirusega pööreldes, kõvaketas
muutuva kiiruse- ja pöörlemissuunaga tõstemehhanismid:
kraanad ,
liftid,
robotid . ühtlaselt sirgjooneliselt konveier perioodiliselt
edasi – tagasi, trükkimisseadmed mitteperioodiliselt edasi tagasi,
elektriline roolimehhanism autodes, positsioneerimisseadmed.
Teatud
hulga soojuse vabanemisel, tõstab see igal mehhanismil osade
temperatuuri, näiteks täiturmehhanismide
puhul. Temperatuuri tundlikumaks üheks osaks mehhanismi juures on
kunstmaterjalist
valmistatud isolatsioon, mis võib ülekuumenedes üles sulada, kui
kuumus on ülempiiri juba saavutanud.
Elektijaam töötab nii püsireziimis kui ka tsükliliselt. Tavaliselt on
märgitud mootorile suhteline lülitus kestus protsentides.
Sageli
valitakse mootorit selle põhjal, kui suur on kestvusaeg töö
tegemiseks. Tõsteseadmetel ja tööstusrobotitel muutuvad moment ja
kiirus talituskestvusel jooksul märgatavalt.
4
Universaalmootor See on üks elektrimootori alaliike. Seda
mootorit saab toita nii alalisvooluvõrgust kui ka
vahelduvvooluvõrgust ja seda osa, mida toidetakse, nimetatakse
universaalseteks kommutaatormootoriteks. Kõige enam on levinud
jadaergutusega kommutaatormootorid. Vahelduvvoolu toite korral tekib
mootori magnetahela massiivsetes osades suur
soojuskadu ning avaldub
ergutusmähiste suur induktiivtakistus. Masina omaduste parandamiseks
koostatakse ta
kere ja poolused ning ankur elektrotehnilisest
lehtterasest stantsitud lehtedest.
Eelised
asünkroonmootori ees:
kiirema käiguga, mis pole seotud kiire
toiteallika sagedusega. Kompaktsus kasutatakse pealmiselt reduktori
korral. Tänu sellele on suur käivitusmoment. Koormuse kasvu korral
puhul, siis kui
toitepinge on sellel puhul muutumatu, vähenevad
hiljem automaatselt ja võrdeliselt seal olevad
pöörded praktiliselt nullini ja hiljem suureneb automaatselt selle moment.
Mootoril on peamiselt pehme
mehaaniline tunnusjoon . Moment on
tavaliselt võrdeline ja pöörded on põhiliselt pöördvõrdelised
võlli koormusega ehk tarbitava võimsusega.
Sõltuvus on
praktiliselt lineaarne tühijooksust kuni selle täieliku
pidurduseni. Toitepinge muutmisel on võimalik sujuvalt ning väga
laias vahemikus nullist nimiväärtuseni reguleerida momenti ning
pöörete arvu ajaühikus.
Harjavaba alalismootori allikast juhitakse alalisvoolu mootorit
Inverteriga
põhiliselt
luuakse tänu sellele vahelduvoolu
signaal , millega seda
juhitakse. Lisasensorid ja
elektroonika juhivad ja suunavad inverteri
väljundi amplituudi ning laine kuju ja sagedust (nagu näiteks
rootorkiirust). Harjavaba alalisvoolumootorit saab kirjeldada
põhiliselt samm-mootorina. Peamiselt suure võimsusega harjavabad
mootorid on kasutuses elektriautodes ning hübriidautodes.
Mootorid
on populaarsed mudellennunduses nende võimsuse ja kaalu suhte ning
suure suuruste valiku tõttu. Alates viiest grammist kuni suurte
mootoriteni, mille võimsus on määratud kW-des, on nad muutnud
mudellennundust ja asendanud kõik harjamootorid.
Piesoelektriline
mootor
Seega
kasutab piesomootor piesoelektrilist pöördeefekti. Kulg- või
pöörlemisliikumise saavutamiseks tekitab muutuv elektriväli
ultrahelisagedusega piesokeraamilises
materjalis sama sagedusega
mehaanilisi võnkumisi. Libisev-hõõrduv mootori täituriks on aktuaator. Ühe võimaliku edasiliikumise viisina kasutatakse erineva
kiirusega pikenemist ja lühenemist, et roomata edasi nagu
röövik .
Ühes suunas proovitakse liigutada piesoelektrilist täiturit
aeglaselt, nii et rootor liigub kaasa. Tänu selle tõmbub
piesoelektriline materjal kiirelt kokku ning rootor jääb
paigale.
5
KOKKUVÕTE
Referaat
käsitles erinevaid elektrimootoreid ja neid uurides avastasin ma
enda jaoks nii mõninga uue mõiste, mida ma varasemalt ei
teadnud .
Samuti sain selgemaks, mis alaliigid elektrimootoril on, ja milleks
neid kasutatakse ning mida need endast kujutavad. Referaat antud
teema kohta täiendas minu teadmisi mitmekordselt. Minu referaadist
võib leida kõike elektrimootori ja selle alaliikide kohta.
Referaati koostades sain ka aru mootori olulisusest seadmetes.
6
Lisad
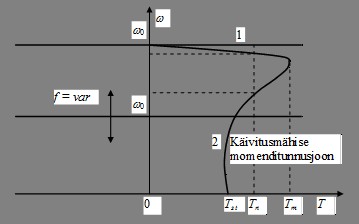
Sellel
joonisel on näha Sünkroonmootori tunnusjoon. Esimesel on näha,
millline on sünkroontalitluses ja teisel käivitamise käigus.
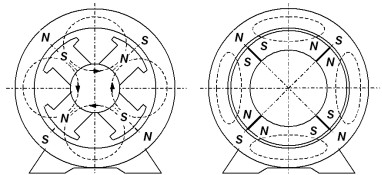
Sünkroonmootori
ehituse joonis, mis on koos väljepoolustega (vasakul) ja
peitepoolustega (paremal).
7
Kasutatud kirjandus
https://et.wikipedia.org/wiki/Elektrimootor http://www.tthk.ee/MEH/Taiturid_3.html https://et.wikipedia.org/wiki/Universaalmootor https://et.wikipedia.org/wiki/Harjavaba_alalisvoolumootor 8



















Kõik kommentaarid